
On a Wireless Sensor Network Problem with Spanning Tree Backbone
Pablo Adasme
1 a
and Ali Dehghan Firoozabadi
2 b
1
Department of Electrical Engineering, Universidad de Santiago de Chile, Avenida Ecuador 3519, Santiago, Chile
2
Department of Electricity, Universidad Tecnol
´
ogica Metropolitana,
Av. Jose Pedro Alessandri 1242, 7800002, Santiago, Chile
Keywords:
Combinatorial Optimization, p-Median and Spanning Tree Problems, Mixed-integer Linear Programming,
Wireless Sensor Networks, Local Search Algorithm.
Abstract:
Let G = (V, E) be a complete graph with set of nodes V = {1, . . . , n} and edge set E = {1, . . . , m} representing
a wireless sensor network. In this paper, we consider the problem of finding a minimum cost spanning tree
backbone formed with p ∈ Z
+
out of n nodes where p < n in such a way that the n − p remaining nodes
of G are connected to the leaf nodes of the backbone structure at minimum connectivity cost. Notice that
this problem arises as a combination of two classical combinatorial optimization problems, namely the p-
Median and spanning tree problems. We propose two mixed-integer linear programming (MIP) formulations
for this problem as well as a local search heuristic. The proposed models and algorithm can be used as a
reference source for comparison purposes when designing future network protocols. We consider complete
graph instances with Euclidean and random uniform costs. Our preliminary numerical results indicate that one
of the proposed models performs slightly better than the other one in terms of solution quality and CPU times
obtained with the Gurobi solver. Finally, the proposed heuristic allows one to obtain near-optimal solutions in
remarkably less CPU time compared to the MIP models.
1 INTRODUCTION
The topic of wireless sensor networks has attracted
continuously increased attention by both the research
and industry communities within the last decades.
This is mainly due to the fact that there exists a huge
potential space for application deployments related to
these types of networks. Examples of applications
include environmental observation and forecasting,
disaster prevention, structure health, industrial mon-
itoring, agriculture production, security, and military
surveillance, to name a few (BenSaleh et al., 2020).
Consequently, new technologies are being developed
to support these future network deployments. Optical
wireless communications and massive multiple-input
multiple-output (MIMO) transmission technologies
are examples of 5G and 6G protocols enabling a bet-
ter quality of service for an ever-increasing number
of users (Chowdhury et al., 2020; Huang et al., 2019;
Jiang et al., 2021).
In this paper, we consider an optimization prob-
lem related to the required infrastructure for these
a
https://orcid.org/0000-0003-2500-3294
b
https://orcid.org/0000-0002-6391-6863
types of networks. More precisely, let G = (V, E) be a
complete graph with set of nodes V = {1, . . . , n} and
edge set E = {1, . . . , m} representing a wireless sen-
sor network. We consider the problem of finding a
minimum cost spanning tree backbone formed with
p ∈ Z
+
out of n nodes where p < n in such a way
that the n − p remaining nodes of G are connected to
the leaf nodes of the backbone structure at minimum
connectivity cost. Notice that this problem arises as a
combination of two classical combinatorial optimiza-
tion problems, namely the p-Median and spanning
tree problems. We propose two mixed-integer pro-
gramming (MIP) formulations for this problem and
a local search heuristic that allows obtaining near-
optimal solutions in significantly shorter CPU time
when compared to the MIP models. Our first model
is formulated based on a Miller-Tucker-Zemlin con-
strained approach. Whereas the second one is a sin-
gle flow-based formulation (Adasme, 2018; Adasme
et al., 2018; Adasme, 2019; Adasme et al., 2017). No-
tice that in principle, the proposed models allow ob-
taining the optimal solution of the problem and hence
they can be used as a reference source for compar-
ison purposes when designing future network proto-
76
Adasme, P. and Firoozabadi, A.
On a Wireless Sensor Network Problem with Spanning Tree Backbone.
DOI: 10.5220/0010569700760082
In Proceedings of the 18th International Conference on Wireless Networks and Mobile Systems (WINSYS 2021), pages 76-82
ISBN: 978-989-758-529-6
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
cols. Our proposed heuristic is simple and it is mainly
based on the variable neighborhood search approach
proposed by (Mladenovic and Hansen, 1997; Hansen
and Mladenovic, 2001).
Related works to the problem in this paper can be
consulted for instance in (Martin et al., 2014; Yaman
and Elloumi, 2012; Adasme, 2018) and in references
therein. In (Adasme, 2018), the author considers a
similar problem while using two disjoint subsets of
nodes instead of one set as we do in this paper. More
precisely, the author considers a subset of users and a
subset of facility nodes. In this paper, we assume that
the set of nodes of the network is unique and con-
sequently each node can act as a facility (dominant)
or as a user (dominated) node indistinguishable. As
such, the problem studied here is more specific and
thus can be utilized in any sensor network in which
a particular node can be part or not of the solution
backbone. Notice that the problem studied here leads
to additional mathematical formulations and solution
procedures, thus contributing to the state of the art lit-
erature.
The paper is organized as follows. In Section 2,
we give a succinct description of the problem and
present the two mathematical formulations. Then, in
Section 3, we present and explain the proposed lo-
cal search algorithm. Subsequently, in Section 4 we
present preliminary numerical results. Finally, in Sec-
tion 5, we conclude the paper and provide some in-
sight for future research.
2 PROBLEM DESCRIPTION AND
MATHEMATICAL
FORMULATIONS
In this section, we first explain the sensor network
problem at hand by means of an example of a fea-
sible solution to the problem. Then, we present and
explain the proposed mathematical formulations.
2.1 A Feasible Solution for the Problem
As mentioned in Section 1, we represent a wireless
sensor network by means of the complete graph G =
(V, E) with a set of nodes V and connection links E.
The underlying idea is to construct a backbone net-
work in the form of a spanning tree with p out of n
nodes while connecting the remaining n − p nodes to
the resulting leaf nodes of the tree at minimum total
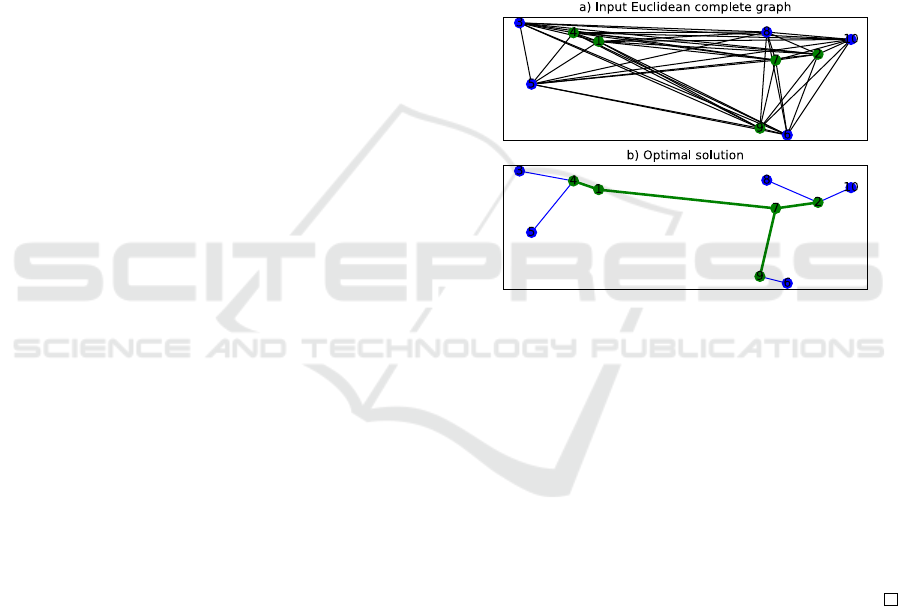
connectivity cost. In Figure 1, we present an exam-
ple of an input complete graph instance composed of
n = 10 nodes and the optimal solution obtained for a
value of p = 5. Recall that an optimal solution to the
problem is also a feasible solution.
As it can be observed from Figure 1, the five green
nodes and the edges connecting them are part of the
backbone network and form a spanning tree, i.e., an
acyclic connected graph with p − 1 = 4 edges. Simi-
larly, the remaining n − p = 10 − 5 = 5 nodes, which
in this case are also five, are colored blue and con-
nected to the leaf nodes of the spanning tree formed
with the green nodes. A leaf node of the spanning
tree is a node with a degree equal to one, i.e., a node
having only one neighbor.
Hereafter, we refer and denote by pMST to this
sensor network problem.
Figure 1: Example of a Euclidean input complete graph in-
stance composed of n = 10 nodes and its optimal solution.
Observation 1. For any value of p ∈ {1, . . . , n}, a
feasible solution for pMST corresponds to a spanning
tree composed of n nodes.
Proof. For a particular value of p, the acyclic back-
bone to be obtained will contain p − 1 edges. Since
there are n − p remaining nodes and each one of them
must be connected to a unique leaf node of the re-
sulting backbone structure, then there are n − p addi-
tional edges. Consequently, the total number of edges
is (n − p) + (p −1) = n − 1.
Observation 2 . When p = 1, pMST reduces to find
a star graph and its optimal solution can be obtained
in at most O(n) steps.
Observation 3. When p = n, pMST reduces to the
classical minimum spanning tree problem which can
be solved in polynomial time in at most O(m log m)
where m denotes the number of edges of the input
graph (Kruskal, 1956).
Proposition 4. For any value of p ∈ {1, . . . , n} and
n ≥ 3, there are
n
p
p
p−2
≤ n
n−2
labelled spanning
trees in the feasible set of pMST .
On a Wireless Sensor Network Problem with Spanning Tree Backbone
77
Proof. First, notice that there are
n
p
combinations of
nodes to form a spanning tree backbone using p out
of n nodes. Recall that Cayley’s formula ensures that
for each complete graph composed of p nodes, there
are p
p−2
labelled spanning trees (Aigner and Ziegler,
1998). To show that
n
p
p
p−2
≤ n
n−2
, we equivalently
prove that for any value of p ∈ {1, . . . , n −1} and n ≥
3, the following inequality holds
n
p
p
p−2
≤
n
p + 1
(p +1)
p−1
Notice that this inequality can be equivalently written
as
n!
(n − p)!p!
p
p−2
≤
n!
(n − (p + 1))!(p + 1)!
(p +1)
p−1
which can be reduced to
(p +1)p
p−2
≤ (n − p)(p + 1)
p−1
and
(n − p)
p + 1
p
p−2
≥ 1
The latter is always valid since p ≤ n − 1 and n ≥
3.
Corollary 5. The solution cost of the minimum span-
ning tree of G is a lower bound for the minimum so-
lution cost of pMST .
Proof. This is a consequence of Proposition 4 which
ensures that the number of backbone solution trees to
be formed with p out of n nodes is less than or equal
to the number of solution trees that can be obtained
with n nodes.
2.2 MILP Models
In order to write the first MIP model, we define the
following binary variables
v
i
=
(
1 if node i ∈ V is part of the backbone tree.
0 otherwise.
z
i
=
1 if node i ∈ V is part of the backbone tree
and a leaf node simultaneously.
0 otherwise.
y
i j
=
1 if connection link (i, j) ∈ V ×V, (i 6= j)
is part of the backbone tree.
0 otherwise.
and
x
i j
=
(
1 if node i ∈ V is connected to leaf node j ∈ V .
0 otherwise.
Notice that even though this last variable x is defined
as a binary one, it can be relaxed within the interval
[0;1] as it always takes values in {0, 1}. This is im-
plied by the constraints (2) in (M
1
). Consequently, a
first MIP model can be written as
(M
1
) : min
{u,v,x,y,z}
∑
i, j∈V
(i6= j)
C
i j
(x
i j
+ y
i j
) (1)
s.t.:
∑
j∈V
(i6= j)
x
i j
+ v
i
= 1, ∀i ∈ V (2)
x
i j
≤ z
j
, ∀i, j ∈ V, (i 6= j) (3)
z
j
≤ v
j
, ∀ j ∈ V (4)
∑
j∈V
v
j
= p (5)
∑
i, j∈V
(i6= j)
y
i j
= p −1 (6)
u
j
≤ pv
j
, ∀ j ∈ V (7)
u
j
≥ v
j
, ∀ j ∈ V (8)
∑
i∈V
(i6= j)
y
i j
≤ v
j
, ∀ j ∈ V (9)
u
j
− u
i
− py
i j
− (p − 2)y
ji
≥ 1 − p,
∀i, j ∈ V, (i 6= j) (10)
∑
i∈V
(i6= j)
y
i j
+
∑
i∈V
(i6= j)
y
ji
≤ (p − 1)v
j
− (p − 2)z
j
,
∀ j ∈ V (11)
x ∈ [0, ∞)
n
2
, u ∈ [0, ∞)
n
(12)
y ∈ {0, 1}
n
2
, z ∈ {0, 1}
n
, v ∈ {0, 1}
n
(13)
In (M
1
), each entry of the input symmetric matrix
C = (C
i j
), for all i, j ∈ V × V, (i 6= j), represents the
connection cost of nodes i and j. Thus, the objec-
tive function (1) minimizes the total connectivity cost.
Constraints (2) ensure that each node i ∈ V should be
connected to a node of the backbone tree or other-
wise, it should belong to the backbone tree. Similarly,
the constraints (3) ensure that each node i ∈ V should
be connected to node j ∈ V if and only if i is not a
leaf and j is a leaf node of the backbone. The con-
straints (4) ensure that each node j ∈ V can be a leaf
node if it is part of the backbone. Notice that these
constraints are required since a node being part of the
backbone is not always a leaf node. Constraint (5)
ensures that the total number of nodes being part of
the backbone equals p. Subsequently, constraints (6)-
(10) ensure that p out of n nodes of V form a spanning
tree. Notice that these constraints act simultaneously
in order to avoid cycles in the output solution of the
problem. For this purpose an auxiliary nonnegative
variable u
i
is defined and used for each node i ∈ V .
WINSYS 2021 - 18th International Conference on Wireless Networks and Mobile Systems
78

For a deeper comprehension of how these constraints
work, we refer the reader to (Desrochers and Laporte,
1991; Adasme et al., 2018; Adasme, 2018). Next, the
constraints (11) ensure that if a particular node j ∈ V
is part of the backbone and if it is chosen to act as
a leaf node, then the degree of j should be equal to
one. Notice that the degree constraint is imposed only
for the nodes of the backbone structure. Obviously,
any leaf node can be connected to several dominated
nodes. Finally, constraints (12) and (13) are domain
constraints for the decision variables.
In order to state a single flow-based formulation
for pMST , we consider the extended set of nodes V ∪
{r} where node r acts as an artificial root node which
is assumed to be connected to every other node in V .
The underlying idea is to construct an arborescence
rooted at r while sending p units of flow from r with
exactly one arc leaving r. We use the same variables
v, x, y, z as defined for model (M
1
) and introduce the
nonnegative flow variables f ∈ [0, ∞)
(n+1)
2
where f
i j
denotes the amount of flow on arc (i, j) ∈ V ∪ {r} ×
V ∪ {r}, (i 6= j). Notice that now the dimensions of
variable v and y are v ∈ {0, 1}
n+1
and y ∈ {0, 1}
(n+1)
2
,
respectively. Consequently, a flow-based model can
be written as
(M
2
) : min
{ f ,v,x,y,z}
∑
i, j∈V
(i6= j)
C
i j
(x
i j
+ y
i j
)
∑
j∈V
(i6= j)
x
i j
+ v
i
= 1, ∀i ∈ V
x
i j
≤ z
j
, ∀i, j ∈ V, (i 6= j)
z
j
≤ v
j
, ∀ j ∈ V
∑
j∈V
v
j
= p
∑
i, j∈V
(i6= j)
y
i j
= p −1 (14)
∑
j∈V
f
r j
= p (15)
∑
j∈V
y
r j
= 1 (16)
∑
i∈V ∪{r}
(i6= j)
f
i j
−
∑
i∈V ∪{r}
(i6= j)
f
ji
= v
j
, ∀ j ∈ V (17)
f
i j
≤ py
i j
, ∀i, j ∈ V ∪ {r}, (i 6= j) (18)
v
r
= 1 (19)
∑
i∈V
(i6= j)
y
i j
+
∑
i∈V
(i6= j)
y
ji
≤ (p − 1)v
j
− (p − 2)z
j
∀ j ∈ V
x ∈ [0, ∞)
n
2
, y ∈ {0, 1}
(n+1)
2
(20)
z ∈ {0, 1}
n
, v ∈ {0, 1}
n+1
(21)
f ∈ [0, ∞)
(n+1)
2
(22)
In (M
2
), constraint (15) ensures that the amount of
flow going from node r to every other node in V
equals p. Similarly, constraint (16) guarantees that
the total flow must be moved through a unique arc
going from r to a unique node j ∈ V . Notice that
the constraints (14), (17) and (18) ensure that the de-
cision variables y = (y
i j
), ∀i, j ∈ V form a spanning
tree backbone using p out of n nodes (Adasme, 2018;
Adasme, 2019). Next, constraint (19) ensures that the
artificial node r is active. Finally, constraints (20)-
(22) are the domain constraints for the decision vari-
ables.
3 LOCAL SEARCH HEURISTIC
In this section, we present the local search method.
The algorithm is simple and mainly consists of in-
terchanging node elements randomly between subsets
V
1
and V
2
where V
1
∪ V
2
= V . The first subset con-
tains p nodes whereas the second one contains n − p
nodes. The pseudo-code of the method is depicted in
Algorithm 3.1. As it can be observed, in step one of
Algorithm 3.1, both subsets V
1
and V
2
are randomly
generated. Then, with the p nodes of V
1
, the algo-
rithm constructs p star graphs and for each one, it as-
signs each of the n − p nodes to its nearest leaf node.
Notice that the way in which we construct each span-
ning tree is a key ingredient of our proposed heuristic.
We notice that it is highly probable to obtain spanning
trees in the form of star graphs as we test instances for
values of p << n so far. Next, in step two we enter
into a while loop in which a variable number of swap
moves indK is performed between subsets V
1
and V
2
.
If a better solution is obtained, we save this new so-
lution as the best found so far and reset indK = 1 in
order to further exploit the neighborhood of the in-
cumbent solution. We also save and reset the current
CPU time in order to allow another maxTime units of
time to run the algorithm. Finally, the current num-
ber of iterations is also saved. Otherwise, if no better
solution is obtained, the algorithm restores subsets V
1
and V
2
with their previous best subsets of nodes and
increases by one unit the variable indK. In case the
indK variable reaches the maximum value indKMax,
then we also set indK = 1 in order to allow the al-
gorithm to explore from local to wider zones of the
feasible space again.
On a Wireless Sensor Network Problem with Spanning Tree Backbone
79
Algorithm 3.1: Random local search algorithm for the
pMST problem.
Data: An input complete graph instance
composed of n nodes, an input value of
p < n.
Result: A feasible solution and its objective
function value.
Step 1;
- Generate an initial random p−tuple of vertices.
Let V
1
denote this set of vertices and V
2
its
complement.
- Generate p star graphs with the nodes of V
1
. For
each generated star graph assign each node in V
2
to its nearest leaf node in V
1
.
- Compute the objective function value of each star
graph solution and save the initial and best
feasible solutions obtained.
- V
1OP
= V
1
, V
2OP
= V
2
.
- indK = 1, C puTime = 0.
Step 2;
while (CpuTime ≤ maxTime) do
- iter = iter + 1
for i = 1 to indK do
- Interchange randomly an element of V
1
with an element of V
2
.
- Generate p star graphs with the nodes of V
1
.
For each generated star graph assign each
node in V
2
to its nearest leaf node in V
1
.
- Compute the objective function value of each
star graph solution.
if (A better solution is obtained) then
- Save the new solution and set
V
1OP
= V
1
, V
2OP
= V
2
.
- iterOp = iter, indK = 1,
Optime = Optime +CpuTime,
CpuTime = 0.
else
- V
1
= V
1OP
, V
2
= V
2OP
.
- indK = indK + 1.
if (indK = indKMax) then
- indK = 1.
- Return best solution obtained and its objective
function value.
4 NUMERICAL RESULTS
In this section, we present preliminary numerical re-
sults obtained with the proposed models and with
the Algorithm 3.1. For this purpose, we implement
a Python program using Gurobi 9.1.1 (Achterberg,
2021) in order to solve both MIP models and their
linear programming (LP) relaxations. The numeri-
cal experiments have been carried out on an Intel(R)
64 bits core (TM) with 3 GHz and 8G of RAM un-
der Windows 10. Gurobi solver is used with default
options. We generate five complete graph instances
with dimensions of n = {40, 80, 120, 150, 200} nodes
using Euclidean and random uniform distance costs.
The random distance costs are drawn from the inter-
val (0;1). All the instances are solved for values of
p = {5, 10} so far. Notice that the number of nodes
of a backbone sensor network is usually smaller than
the number of terminal nodes. In Algorithm 3.1, we
arbitrarily set maxTime = 20s and indKMax = p.
In Table 1, we present preliminary numerical re-
sults obtained with the MIP models. More precisely,
in columns 1-3 we present the instance number, the
value of p, and the number of nodes of graph G, re-
spectively. Next, in columns 4-9 and 10-15 we report
for each model, the best objective function value ob-
tained, the number of branch and bound nodes, CPU
time in seconds required to solve the MIP model, the
objective function value obtained for the LP relax-
ation, its CPU time in seconds and gap values, respec-
tively. The gap values are computed by
Best−LP
Best
∗
100%.
From Table 1, we observe a similar performance
for both models in terms of quality objective function
values and CPU times obtained. Notice that we have
limited the maximum CPU time of the Gurobi solver
to 2 hours. Consequently, when the objective func-
tion value reported is obtained in less than 2 hours,
it means we have found the optimal solution. Other-
wise, we report the best objective function value ob-
tained without proven optimality. Next, we see that
(M
1
) allows to obtain slightly lower objective func-
tion values than (M
2
). This observation is also valid
for the CPU time required to solve the MIP models.
Regarding the number of branch and bound nodes,
we observe values of similar orders of magnitude. We
also see that the objective values obtained with the LP
relaxation of (M
1
) are higher than those obtained with
(M
2
). This is also confirmed by looking at the gap
values as they are tighter for (M
1
). In general, we ob-
serve similar trends for the instances using Euclidean
and random distance costs. Finally, we observe that
the objective function values obtained for p = 5 are
higher than those obtained for p = 10. Notice that
this is a consequence of Proposition 4 which states
that the number of solution spanning trees increases
with p.
In Table 2, we present numerical results obtained
with Algorithm 3.1 for the same set of instances in
Table 1. Columns 1-3 are the same as in Table 1.
For the sake of comparison, in columns 4 and 5,
we repeat columns 4 and 6 from Table 1. Next, in
columns 6-10, we report the initial and best objec-
tive function values obtained with Algorithm 3.1, its
CPU time in seconds, the number of iterations re-
quired to get the best solution, and the gaps obtained
when compared to the best objective values of col-
WINSYS 2021 - 18th International Conference on Wireless Networks and Mobile Systems
80
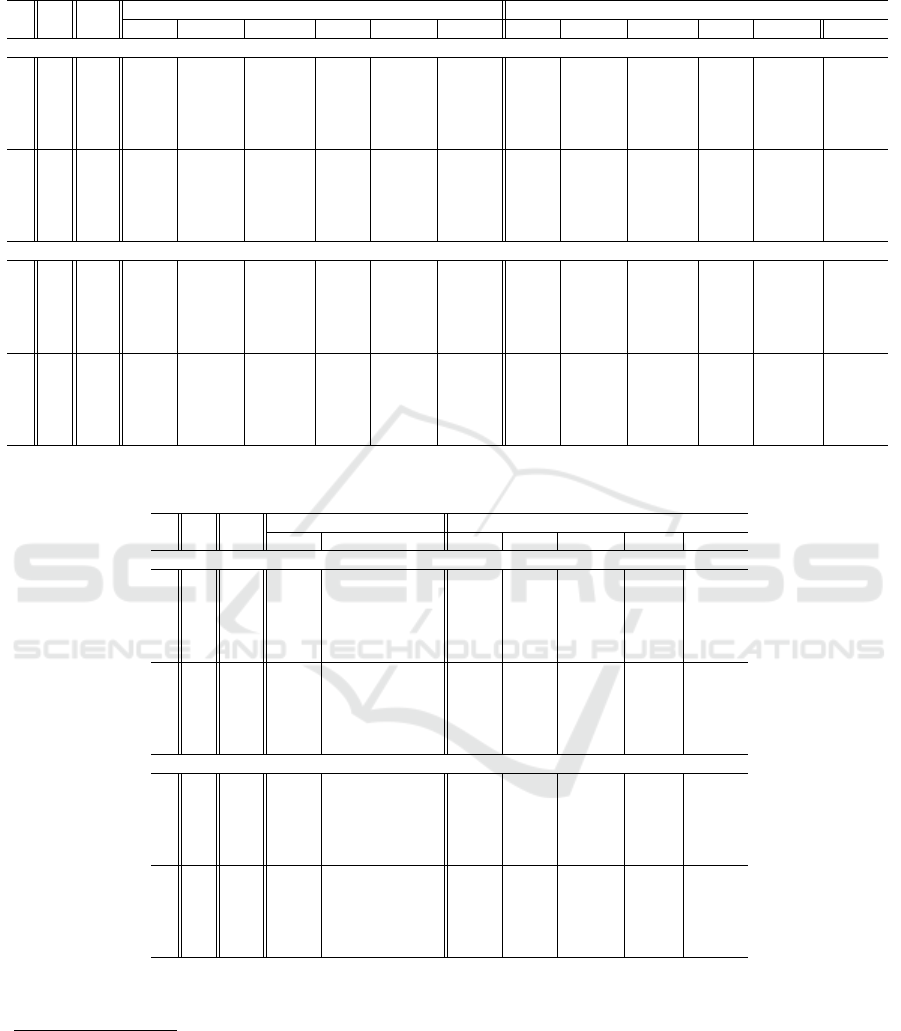
Table 1: Numerical results obtained with models (M
1
) and (M
2
) for complete graph instances with Euclidean and random
distance costs.
# p n
M
1
: (MTZ-based model) M
2
: (Single-flow based model)
Best B&Bn CPU(s) LP CPU(s) Gap % Best B&Bn CPU(s) LP CPU(s) Gap %
Complete graph instances with Euclidean distance cost.
1
5
40 7.54 1403 9.61 6.65 0.05 11.77 7.54 2345 31.04 6.59 0.04 12.5
2 80 16.33 9539 547.35 15.14 0.64 7.26 16.33 25747 1593.37 15.09 0.5 7.59
3 120 23.44 1399 466.54 22.47 2.43 4.14 23.44 3044 885.84 22.3 1.49 4.86
4 150 29.6 17387 3844.75 28.52 5.1 3.61 29.6 5337 7200 28.32 2.17 4.29
5 200 37.56 2319 7200 36.4 16.25 3.08 37.49 1272 7200 36.21 6.83 3.4
1
10
40 6.12 292462 1295.14 4.33 0.03 29.2 6.12 469415 5421.03 4.2 0.02 31.31
2 80 11.66 58762 7200 8.58 0.47 26.38 11.61 16571 7200 8.55 0.23 26.37
3 120 17.15 14811 7200 13.86 2.49 19.18 17.32 5227 7200 13.75 0.99 20.6
4 150 20.96 10148 7200 18.08 5.46 13.71 22.01 1021 7200 17.98 3.89 18.3
5 200 26.64 1625 7200 23.56 16.95 11.54 26.68 779 7200 23.47 7.56 12.02
Complete graph instances with random distance cost.
1
5
40 9.12 173 5.41 7.82 0.07 14.28 9.12 1189 37.81 7.81 0.06 14.37
2 80 17.72 7563 759.38 15.12 0.75 14.67 17.72 12499 1765.01 15.1 1.02 14.77
3 120 28.56 17609 7200 24.79 2.07 13.19 29.2 2556 7200 24.78 2.36 15.14
4 150 36.65 5311 7200 30.97 4.3 15.5 36.74 832 7200 30.96 4.44 15.72
5 200 49.03 884 7200 41.45 9.52 15.46 49.52 132 7200 41.42 9.89 16.36
1
10
40 6.21 1558 16.5 4.53 0.03 27.08 6.21 5363 79.91 4.44 0.02 28.59
2 80 11.82 36880 7200 9.25 0.63 21.74 11.82 14743 7200 9.22 0.71 21.98
3 120 18.96 4376 7200 15.53 2.06 18.09 18.87 1936 7200 15.5 1.91 17.82
4 150 24.41 2528 7200 19.32 3.89 20.84 27.6 992 7200 19.3 3.31 30.06
5 200 32.27 1120 7200 25.69 8.84 20.4 37.0 61 7200 25.65 7.99 30.66
Table 2: Numerical results obtained with Algorithm 3.1 for complete graph instances with Euclidean and random distance
costs.
# p n
M
1
: (MTZ-based model) Algorithm 3.1
Best CPU(s) Ini Best CPU(s) Iter Gap %
Complete graph instances with Euclidean distance cost.
1
5
40 7.54 9.61 15.51 7.54 4.02 4046 0
2 80 16.33 547.35 20.43 16.33 8.27 3912 0
3 120 23.44 466.54 35.67 23.44 8.87 2761 0
4 150 29.6 3844.75 47.89 29.66 10.05 2521 0.22
5 200 37.56 7200 62.96 37.51 27.52 5162 -0.12
1
10
40 6.12 1295.14 12.15 6.67 5.64 2794 9.05
2 80 11.66 7200 16.78 11.72 30.41 6715 0.54
3 120 17.15 7200 23.6 17.15 75.74 10579 0
4 150 20.96 7200 28.5 21.34 91.0 10034 1.84
5 200 26.64 7200 39.15 26.79 98.46 8024 0.57
Complete graph instances with random distance cost.
1
5
40 9.12 5.41 11.88 9.18 1.23 1167 0.65
2 80 17.72 759.38 24.9 17.87 16.43 7844 0.85
3 120 28.56 7200 36.34 29.0 10.32 3335 1.56
4 150 36.65 7200 44.12 36.42 16.79 4247 -0.62
5 200 49.03 7200 54.78 48.19 28.74 5443 -1.69
1
10
40 6.21 16.5 10.07 6.77 2.44 1143 9.14
2 80 11.82 7200 20.27 12.13 47.7 10368 2.68
3 120 18.96 7200 27.75 19.55 23.05 3240 3.11
4 150 24.41 7200 32.8 24.04 153.26 17125 -1.5
5 200 32.27 7200 41.48 32.46 104.45 8316 0.6
umn 4 of Table 2. These gap values are computed by
h
Best(M
1
)−Best(Heuristic)
Best(M
1
)
i
∗ 100% where Best(M
1
) de-
notes the best objective value reported in column 4 of
Table 2 and Best(Heuristic) the best objective value
reported in column 7 of Table 2, respectively.
From Table 2, we observe that the initial objec-
tive values obtained with Algorithm 3.1 are signifi-
cantly larger than the best ones. This fact evidences
the effectiveness of Algorithm 3.1. Then, we see that
the best objective values obtained are near-optimal for
most of the instances. This can be verified by looking
at the gap column as well. Notice that the instances
with negative gaps indicate that better solutions are
obtained with Algorithm 3.1 compared to the solu-
tions obtained with the MIP models. The CPU time
values required by the algorithm are remarkably lower
than those required by the MIP models. Notice that
most of the instances are solved by the algorithm in
On a Wireless Sensor Network Problem with Spanning Tree Backbone
81

less than 100 seconds in contrast to the two hours re-
quired by the MIP solver.
5 CONCLUSIONS
In this paper, we represent a wireless sensor network
by means of a complete graph G = (V, E) with a set
of nodes V and a set of edges E. Then, we consid-
ered the problem of finding a minimum spanning tree
backbone formed with a subset of nodes P ⊆V where
the remaining nodes belonging to subset V \ P must
be connected to the leaf nodes of subset P at mini-
mum total connectivity cost. The problem is mainly
motivated as it can be used for comparison purposes
when developing future network protocols for these
types of networks. We proposed two mixed-integer
programming formulations for the problem and a lo-
cal search heuristic that allows obtaining feasible so-
lutions in less computational effort. So far, we tested
complete graph instances with random uniform and
Euclidean distance costs. Our preliminary numeri-
cal results showed that one of the proposed models
outperforms the other one in terms of solution qual-
ity and CPU times obtained with the Gurobi solver.
Finally, the proposed heuristic allows one to obtain
near-optimal solutions in significantly less CPU time
and better solutions for some of the instances when
compared to the MIP models.
As future research, we plan to propose new for-
mulations and solving methods for the problem. In
particular, novel exact and suboptimal approximation
methods should be investigated in order to compare
with the proposed heuristic.
ACKNOWLEDGEMENTS
The authors acknowledge the financial support from
Projects: FONDECYT No. 11180107 and FONDE-
CYT No. 3190147.
REFERENCES
Achterberg, T. (2021). Gurobi solver,
https://www.gurobi.com/.
Adasme, P. (2018). p-median based formulations with
backbone facility locations. Applied Soft Computing,
67:261–275.
Adasme, P. (2019). Optimal sub-tree scheduling for wire-
less sensor networks with partial coverage. Computer
Standards & Interfaces, 61:20–35.
Adasme, P., Andrade, R., Leung, J., and Lisser, A. (2018).
Improved solution strategies for dominating trees. Ex-
pert Systems with Applications, 100:30–40.
Adasme, P., Andrade, R., and Lisser, A. (2017). Minimum
cost dominating tree sensor networks under proba-
bilistic constraints. Computer Networks, 112:208–
222.
Aigner, M. and Ziegler, G. (1998). Proofs from THE BOOK.
Springer-Verlag.
BenSaleh, M. S., Saida, R., Kacem, Y. H., and Abid, M.
(2020). Wireless sensor network design methodolo-
gies: A survey. Journal of sensors, 2020:1–13.
Chowdhury, M. Z., Hasan, M. K., Shahjalal, M., Hossan,
M. T., and Jang, Y. M. (2020). Optical wireless hy-
brid networks: Trends, opportunities, challenges, and
research directions. IEEE Communications Surveys &
Tutorials, 22(2):930–966.
Desrochers, M. and Laporte, G. (1991). Improvements
and extensions to the miller-tucker-zemlin subtour
elimination constraints. Operations Research Letters,
10:27–36.
Hansen, P. and Mladenovic, N. (2001). Variable neighbor-
hood search: Principles and applications. European
Journal of Operational Research, 130:449–467.
Huang, J., Liu, Y., Wang, C. X., Sun, J., and Xiao, H.
(2019). 5g millimeter wave channel sounders, mea-
surements, and models: Recent developments and fu-
ture challenges. IEEE Communications Magazine,
57(1):138–145.
Jiang, W., Han, B., Habibi, M. A., and Schotten, H. D.
(2021). The road towards 6g: A comprehensive sur-
vey. IEEE Open Journal of the Communications So-
ciety, 2:334–366.
Kruskal, J. B. (1956). On the shortest spanning subtree of
a graph and the traveling salesman problem. Proceed-
ings of the American Mathematical Society, 7:48.
Martin, I. R., Gonzalez, J. J. S., and Yaman, H. (2014).
A branch-and-cut algorithm for the hub location and
routing problem. Computers & Operations Research,
50:161–174.
Mladenovic, N. and Hansen, P. (1997). Variable neighbor-
hood search. Computers and Operations Research,
24:1097–1100.
Yaman, H. and Elloumi, S. (2012). Star p-hub center prob-
lem and star p-hub median problem with bounded
path lengths. Computers & Operations Research,
39(11):2725–2732.
WINSYS 2021 - 18th International Conference on Wireless Networks and Mobile Systems
82
