
Plan Recovery Process in Multi-agent Dynamic Environments
Leonardo Henrique Moreira
a
and C
´
elia Ghedini Ralha
b
Department of Computer Science, Institute of Exact Sciences, University of Bras
´
ılia, Brazil
Keywords:
Multi-agent Planning, Simulation, Dynamic Environments.
Abstract:
Planning is the process that focuses on the choice and organization of actions through their expected ef-
fects. Plans can be affected by unexpected, uncontrolled, non-deterministic events leading to failures. Such
challenging problem boosted works focusing agent distribution, communication mechanisms, privacy, among
other issues. Nevertheless, the plan recovery process does not have a defined standard solution. Thus, in
this work, we present a three-phase plan recovery process to provide resilience to agent plans by supporting
a staggered solution. Whenever an action execution fails, agents try to solve individually through their own
capabilities. But when not possible, agents start an interaction protocol to ask for help. Finally, when previous
two phases were unsuccessful, a centralized planning process is trigged. Regardless the phase in which the
solution is found, agents’ plans are coordinated to guarantee cooperation maintaining information privacy.
An empirical analysis applying metrics such as planning time, final plan length and message exchange was
conducted. Results give statistical significant evidence that agents’ autonomy is better explored in agents’
loosely coupled environments. The contributions of this work include: a three-phase plan recovery process, a
simulation tool for benchmarks, and a statistical robust evaluation method to multi-agent planning.
1 INTRODUCTION
In multi-agent system (MAS), agents interact with the
environment and with other agents through the exe-
cution of actions towards the transformation of the
environment from a initial to a desirable state. The
sequence of these actions is a plan, being the result
of agents’ deliberation process performed before or
during acting (Ghallab et al., 2014). Furthermore,
planning and execution responsibilities are distributed
over multiple entities. Thus, agents must coordinate
continually their efforts towards the satisfaction of
individual or global goals to guarantee the coopera-
tion by defining a multi-agent planning (MAP) model.
MAP applications are required in ordinary to com-
plex tasks, such as logistic and fire rescue activities,
respectively. A common point in both scenarios is the
fact that agents depend on or affect other agents un-
der different levels, regarding the interaction that their
action executions induce.
In a classical MAP models, changes in the envi-
ronment are expected to happen only by agents’ ac-
tion executions. However, those models become inef-
fective in scenarios where events that are neither con-
a
https://orcid.org/0000-0003-0479-578X
b
https://orcid.org/0000-0002-2983-2180
trolled nor expected by agents can happen and update
the environment state. Those events, labeled as ex-
ogenous, are common in dynamic environments. In
this case, the planning process performed in an ear-
lier and single phase (disconnected from execution) is
not able to provide resilience to agents (Ghallab et al.,
2014; Komenda et al., 2014; Chrpa et al., 2020).
In the related work, the MAP models are com-
posed by two different and isolated recovery strate-
gies: replanning and repairing. Although each strat-
egy has its pros and cons, MAP models that apply
both of them regarding agents’ capabilities are miss-
ing in the literature.
Therefore, our goal is to propose a plan recovery
process that combines repairing and replanning strate-
gies, providing conditions to agents to perform a stag-
gered solution. As soon as agents detect an action
execution failure, they first try a local repair by plan-
ning individually, considering only their own capabil-
ities. In this sense, agents keep the information pri-
vacy because they do not inform which actions they
are able to perform. When the local repair phase is
not possible, agents interact to ask for help. Finally, if
even so no solution is returned, a centralized planning
phase is triggered. Therefore, the proposed process
tries to avoid message exchange in conditions where
Moreira, L. and Ralha, C.
Plan Recovery Process in Multi-agent Dynamic Environments.
DOI: 10.5220/0010559301870194
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 187-194
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
187

a local solution is possible. This ability is important
in environments where communication is complex or
agents must deliberate quickly towards the solution
of global goals, for instance, during rescue operations
after catastrophic events.
This work was motivated by the hypothesis that
agents’ autonomy in performing local repair is better
explored in environments with low levels of interac-
tion. Therefore, we followed a research methodology
that was guided by the literature review, process de-
sign, simulation of benchmarks and results analysis
with enough evidence to accept or reject the research
hypothesis.
Beyond the development of the plan recovery pro-
cess, our contributions to the MAP area also include a
simulation tool for benchmarks executions and a sta-
tistical evaluation method regarding final plan length,
planning time and message exchange.
The rest of the document is structured as follows.
In Section 2, we present the MAP concepts. In Sec-
tion 3, we detail the proposed plan recovery process
along with the simulation tool, while in Section 4 we
describe the experiments and then, we discuss the re-
sults following statistical evaluation method. Finally,
we present conclusion and future work in Section 5.
2 BACKGROUND
In Section 2.1, we present MAS and MAP formal def-
initions. In Section 2.2, we detail plan recovery strate-
gies described in related work.
2.1 MAS and MAP Concepts
A MAS is a set of software entities able of sensing
(sensors) and modifying the environment state using
their actuators (Weiss, 2013). Thus, a MAS is com-
posed by autonomous agents that interact in a shared
environment through a communication protocol. To
interact agents need also a coordination model that
can put together competitive or cooperative agents.
A negotiation protocol is required when competitive
agents are defined. But, when cooperative agents in-
teract in the same environment, a planning protocol
is necessary to define the individual and group goals,
avoiding conflicts in the shared resource usage.
Furthermore, MAP can be understood as the plan-
ning and executing process distributed over multiple
agents (Torre
˜
no et al., 2017). The agent distribution
characteristic focuses on the number of agents and the
roles they adopt during the process of finding a so-
lution for the problem. The agents involved in the
reasoning stage of synthesizing the sequence of ac-
tions (plan) are the planning entities. Executors are
agents committed to execute actions, such as a robot
or a software entity in a simulator.
The MAP models can be specialized into many
different models and approaches regarding the as-
sumptions made about actions: deterministic, hier-
archical, temporal, non-deterministic and probabilis-
tic. In this work, we assume some premises to deal
with MAP similarly to related work (Borrajo and
Fern
´
andez, 2019): the environment is fully observ-
able, agents are collaborative, actions are unit cost and
instantaneous, communication process is free of fail-
ures.
An operator θ is a schema that defines actions us-
ing parameters and is represented by: name(θ), an
identification to the operator; pre(θ), the set of pre-
condition that stands for literals required to apply the
operator; and e f f (θ) which is formed by a set of ef-
fects that stands for literals which are added (e f f
+
)
or deleted (e f f
−
) from the state of the world after ex-
ecuting the operator.
The set of operators, types and parameters defines
the planning domain. An action is a particular oper-
ator instantiation, where all parameters are replaced
by objects. So, the set of available actions, AG
i
, is
formed by the combination of the every parameter
value. A tuple that is formed by all available actions,
logical propositions, the environment initial state I
and the goal G is defined as the planning problem.
In a multi-agent environment, agents’ plans coex-
ist. Thus, a MAS requires coordination when agents
execute their plans simultaneously, because they can
compete for some resources or even undo the effects
of each other’s actions. This coordination require-
ment derives from the fact that actions can be pub-
lic or private. According to Definitions 1 and 2 from
(Brafman and Domshlak, 2008).
Definition 1. An action is public whenever some
propositions of its preconditions or effect appears in
an action that belongs to other agents. The set of all
public actions is defined by:
A
Pub
= {α|∃i, j : i 6= j, α ∈ A
i
, α
0
∈ A
j
,
and (pre(α)∪ e f f (α)) ∩ (pre(α
0
) ∪ e f f (α
0
)) 6=
/
0}.
Definition 2. An action is private whenever it does
not affect nor depends on actions that belongs to other
agents. The set of all private actions is defined by:
A
Priv
= A \ A
Pub
.
When planning concerns only about private ac-
tions, it can be performed locally since actions do not
depend or are not dependent of other agent’s actions
(Komenda et al., 2014). Under this condition, a coor-
dination process is not necessary because there is no
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
188

competition or cooperation issues. Therefore, the co-
ordination complexity is formalized as a function of
the number of actions executed by an agent that af-
fect or depend on other agents. Complexity derives
from the agents’ coupling level or the interactions,
that are required to control the dependency among
agents (Brafman and Domshlak, 2008).
Regarding action classification (Definitions 1 and
2) and coordination complexity, planning problems
can be defined as follows. In loosely-coupled do-
mains, most of the available actions are private lead-
ing to low interaction level. In tightly-coupled, agents
need to interact to satisfy goals because of the public
behavior of actions.
In a multi-agent plan actions scheduled to be
started at the same instant must be independent of
each other to guarantee cooperation and avoid compe-
tition. A multi-plan ρ, with π[i, t] = α
i
t
, i ∈ AG, t ≥ 1 is
a sequence of actions that can be executed in parallel
by different agents at the same instant t. Thus, the set
of actions of a plan ρ to be executed at the instant t
is A
ρ
t
= {α
i
t
|∀i, j ∈ AG : i 6= j, α
i
t
∈ ρ, ϕ(α
i
t
, α
j
t
) =
/
0}.
Data representation of multi-agent plan ρ is:
ρ =
α
1
1
α
1
2
ε
α
2
1
ε α
2
2
ε α
3
1
ε
An agent updates the environment state by execut-
ing an action. The transition caused by the action α
applied in a state s is defined by Equation 1.
γ(s, α) = (s \ e f f
−
(α)) ∪ e f f
+
(α) (1)
2.2 Plan Recovery Strategies
Problems may happen during the execution of a plan
because of different reasons. Actions may be not
executed because some of their requirements (pre-
conditions) are not held. For instance, a previous ac-
tion did not performed as planned. The set formed by
these uncontrolled, unexpected and non-deterministic
facts are labeled in literature as exogenous events.
Hence, there must recovery strategies that enable
agents with an adaptation ability insomuch they can
overcome a failure as soon (Ghallab et al., 2014).
Basically, there are two types of recovery strate-
gies and they differ from their results (final plan). In
order to illustrate the difference between the replan-
ning results and repairing strategies, after the occur-
rence of a single failure, consider the conditions pre-
sented in Table 1.
Let the failure be the impossibility of executing
action α
3
because of some exogenous events. The re-
planning strategy provides a new plan replacing the
suffix (α
3
0
, . . . , α
m
0
) of the initial plan, starting from
action α
3
, by a new sequence of actions α
0
3
, . . . , α
0
m
.
Here, nothing can be assumed about the final plan
length, which can be bigger or smaller than the ini-
tial one. On the other hand, the repairing strategy
tries to return the environment state to the expected
conditions that support the execution of α
3
. Thus,
a new item β, that can be either a single action or a
sequence of actions, after α
2
and then preserves the
suffix α
3
, . . . , α
m
. In this case, the final plan is greater
than the initial one.
Table 1: Difference in results of recovery strategies.
Strategy
Initial Final
plan plan
Replanning [α
1
, . . . , α
m
] [α
1
, α
2
, α
3
0
, . . . , α
m
0
]
Repairing [α
1
, . . . , α
m
] [α
1
, α
2
, β, α
3
, . . . , α
m
]
In (Komenda et al., 2014), authors propose a
multi-agent plan repair in dynamic environments
where a failure is caused by a state perturbation or
by an action removal from the plan. Three algorithms
are described: back on track (BoT), lazy repair (LR)
and repeated lazy repair (RLR).
The Hierarchical Iterative Plan Repair (HIPR) ap-
proach, proposed by (Mohalik et al., 2018), combines
an architecture and an algorithm to support hierarchi-
cal agent teams to replan after a hazard occurrence.
Agents try to repair its current plan locally or sent a
signal and try to recovery from failures related to pre-
conditions or actions.
The DRA
∗
is an extension of A
∗
algorithm suited
for the repairing of sequential plans. The goal-
set modifications and actions’ costs updates are ad-
dressed (Gouidis et al., 2018).
In (Cashmore et al., 2019), authors tackled the
problem of replanning for robots using temporal plan-
ning problem. Actions have well-defined duration and
during their execution it is likely to replan in order to
recover a failure or to avoid wasting resources, such
as time and battery.
3 PLAN RECOVERY PROCESS
The plan recovery process proposed in this work com-
bines three MAP dimensions related to dynamic envi-
ronments: planning, coordination and execution. This
combination was motivated by the literature review
that highlighted an important conclusion: the need to
investigate planning and execution in dynamic envi-
ronments where exogenous events occur and render
plans useless (Torre
˜
no et al., 2017).
In the proposed process, there are two types of en-
tities. The coordinator is responsible for handling a
Plan Recovery Process in Multi-agent Dynamic Environments
189

pair of files that represents planning domain and prob-
lem. Those files are described according to Multi-
Agent Planning Domain Definition Language (MA-
PDDL). Then, the coordinator searches for a plan-
ning problem solution. This initial (and centralized)
plan is transformed to a set of single-agent plans. In
such plans, actions are scheduled to a common step
whether they can be carried out simultaneously by
their executors. Then, these plans are sent to the co-
ordinator to start a monitoring loop.
The second type is defined as agents that play
planning and executing roles. Therefore, each agent
has autonomy to run a deliberation process, whenever
it needs. Agents have the commitment of executing
the planned actions. Moreover, agents also performs
coordination activities to guarantee an environment
free of conflicts.
Regarding these premises, the dimensions are
handled in staggered solution when agents can try dif-
ferent strategies regarding their capabilities. The pro-
cess design can be summarized as a three-phase se-
quence that agents first try to recover from a failure
using a local planning. If in this phase is impossible
to find a solution, the agent that detected the problem
interact with other agents asking for help. Whether
some agents return positive answers, the caller will
compare the solutions and choose the best (plan with
the smallest number of actions) and coordinate with
all agents the new execution condition. Otherwise,
the caller agent triggers a centralized planning pro-
cess that is performed by a coordinator agent.
The plan recovery process is presented in Figure
1, where the pipeline of each entity type is described
in individual lanes. The process activities are detailed
in Sections 3.1-3.11 highlighted by section numbers.
3.1 Problem Instance
The planning domain and problem files are parsed to
identify the initial state, goals and operators. Then the
available actions are computed and the literals that are
updated in action’s effects are listed. Those literals are
special because they define the search space (relevant
facts). The other literals are rigid facts because they
are not affected by action results. Both classification
are important since only relevant facts must remain
after an encoding phase with the purpose of reducing
the search space to be explored in the planning phase.
3.2 Centralized Planning
The first planning activity is carried out centralized by
the coordinator. In this step, agents are considered as
resources. In addition, to compute the plan, this activ-
ity is also important to select agents to be committed
to execution.
In this sense, the centralized planning provides
a solution that minimizes the number of actions re-
quired to turn the environment initial state to the goal
state. Thus, only the executors of those actions are
granted to join the next activities. In case the planning
problem has no solution, no execution is triggered and
no further activities are performed.
3.3 Plan Coordination
After the definition of the initial plan, the coordina-
tor starts to build the multi-agent plan ρ. First, each
agent action is separated in individual lists. Then, a
loop is started where the first action of each list is
checked about the possibility to be carried out simul-
taneously from the initial state I. The actions that sat-
isfy the conditions are popped from their agents’ list.
Otherwise, an empty action (idle state) is defined to
the respective executor. Those actions are placed in
multi-agent plan and simulated to compute the next
expected environment state. The loop finishes when
every action of the initial plan is added to ρ.
3.4 Sending Problem and Plans
As soon as the multi-agent plan is defined, coordi-
nator sends the single-agent plans (ρ matrix rows) to
their owners. Moreover, it sends a fragment of the
planning problem that is formed only by the initial
state, goals and available actions of each agent. Thus,
information privacy is kept because no agent knows
about other agents’ capabilities.
3.5 Environment Monitoring
At this point, coordinator starts to monitor the envi-
ronment with a double concern. First, it controls the
plan execution of every agent by receiving messages
when they finish their tasks. When there are no more
actions to be performed, the coordinator runs its sec-
ond verification, namely, goal satisfaction. This is an
important activity because of the possibility of exoge-
nous events that impair the plan execution leading to
failures. If the coordinator detects a problem, it starts
a new centralized planning and follows with the next
pipeline activities.
3.6 Plan or Coordination Message
The first activity in the agent’s pipeline is receiving
message about plan and problem. Now, each agent
knows its sequence of actions, that was checked and
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
190
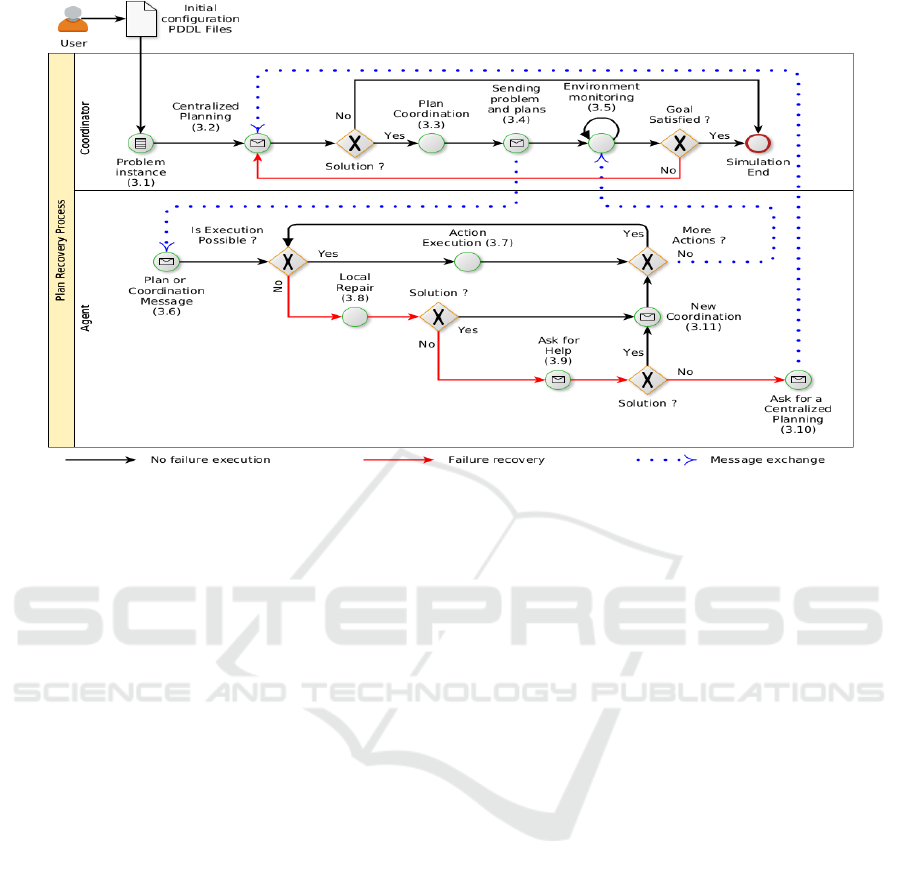
Figure 1: Plan recovery process.
scheduled by to coordinator to provide an execution
phase free of conflicts.
This activity can also be triggered when another
agent needed to updated its plan (recovery) and then
send a message to inform its efforts (number of ac-
tions) to overcome a failure. Hence, all the receivers
adjust their plans, adding waiting steps (empty ac-
tions), as a new coordination phase. We highlight that
the coordinator is not warned by the sender because it
only needs to control the end of agents’ plans.
3.7 Action Execution
The execution phase starts with agents’ evaluations
about the conditions to run their actions. Each agent
analyses the current environment state (s
t
) and veri-
fies the possibility to execute the next action. When
the preconditions are held, the agent executes the ac-
tion α, turning s
t
to s
t+1
according to Equation 1, and
returns to the evaluation step.
After the execution of the last action, agents send
a message to the coordinator to inform that the tasks
are done. At the evaluation step, the agent may detect
a failure when its next action can not be carried out
because of error in the preconditions. Thus, it starts
the recovery process.
3.8 Local Repair
The first step of the plan recovery process is per-
formed by the agent that has just detected the failure.
Then, it starts a local repair activity. The agent applies
the repairing strategy and tries to find a solution that
leads the environment state to a condition where the
preconditions of the failed actions are satisfied.
If the agent finds a possible solution, it updates its
own plan by adding the actions in the beginning of its
list, keeping the suffix of the plan from the failed ac-
tion. In the sequence, agent informs other executors
that it needs to run more actions to bring the environ-
ment to expected state. However, it is likely that the
agent does not find a solution because of a lack of ca-
pabilities. Therefore, the next attempt is to ask other
agents for help.
3.9 Ask for Help
When an agent asks for help, it shares the conditions
the environment state needs to satisfy to guarantee the
execution of the failed action. As soon as other agents
receive the message, they try a local repair to send
back the results. In order to keep the information pri-
vacy, agents only share the number of actions they
need to recover, instead of sharing the actions them-
selves.
When just one agent returns a positive answer,
this is the solution. However, in the presence of two
or more answers, the agent evaluates the possibilities
and chooses the best solution considering the small-
est number of actions. Then, the selected executor
is warned to update its plan by adding the solution,
while other agents just receive a coordination message
Plan Recovery Process in Multi-agent Dynamic Environments
191
about the numbers of actions that the chosen agent
needs to perform.
3.10 Ask for a Centralized Planning
When the previous phases (Local Repair and Ask for
Help) fail in finding a solution, the next activity of
the agent that detected the failure is to send a mes-
sage asking the coordinator for a centralized planning.
While the earlier attempts applied the repairing strat-
egy, now the solution is tried through replanning.
As soon as the coordinator receives the message,
it runs a centralized planning. But different from
the first round, the coordinator plans from the current
state rather than the initial one. If it finds a solution to
reach the goal from that state, it follows the pipeline
(Plan Coordination - Sending Problem and Plans - En-
vironment Monitoring), otherwise no further activity
is carried out.
3.11 New Coordination
Agents may receive messages about a new coordina-
tion phase. These messages are sent in two condi-
tions. First, when one agent runs a local repair activ-
ity and finds a solution. Then, the others agents needs
to adjust their plan regarding that new solution. Sec-
ond, a local repair fails, but after asking for help, the
agent receives one positive answer. In this case, all
agents, but the chosen one, updates their plans to wait
for the execution of that solution.
4 EXPERIMENTS
In this section, we detail the experiment setup (Sec-
tion 4.1) and discuss the results (Section 4.2).
4.1 Experiment Setup
In order to evaluate the proposed plan recovery pro-
cess, we used open source software to build a simula-
tion tool. As a solution for the parser and planning
issues (Sections 3.1, 3.2, 3.8 and 3.9), we decided
to use the PDDL4J
1
JAVA library (Pellier and Fior-
ino, 2018). Regarding to simulation engine, we chose
the Repast Symphony
2
platform for supporting agent-
based modeling and simulation (North et al., 2013).
The simulation tool is available in an repository
3
.
1
https://github.com/pellierd/pddl4j
2
https://repast.github.io/
3
https://gitlab.com/publicrepo/lcmap-de
The case studies applied in the experiments were
based on the domains and problems used in the
Competition of Distributed and Multi-agent Planners
(CoDMAP), which was carried out together with the
workshop on Distributed and Multi-agent Planning
(DMAP) at the ICAPS 2015 (cod, 2015). Regard-
ing the most used case studies described in the related
work, the domains chosen from CoDMAP were satel-
lite, logistics and taxi.
The experiments were carried out under multiple
conditions. The failure probabilities varied from 0.1
to 0.9 following a 0.1 step. Each case study had
three different configurations which were simulated
30 times. The configurations were selected according
to the ratio of public actions with the purpose of sim-
ulating problems with different levels of agent cou-
pling. Under those conditions, the experiments were
ran by 2430 simulations. The setup description re-
garding the number of agents, goals and actions in
each domain, is summarized in Table 2, where values
in cells stand for the minimum and maximum values.
Table 2: Setup description.
Domain Agents Goals Actions Public (%)
Satellite 3;5 6;10 497;1473 26.2;40.4
Logistics 3;5 6; 10 78; 308 61.5;62.3
Taxi 4;7 4;7 28; 126 100
We carried all experiments out in a single com-
puter with a Intel Core i7-10510U CPU and 16 GB
RAM. The operational system was Ubuntu 20.04.1
LTS 64-bit.
4.2 Discussion
The plan recovery process was evaluated regarding
three metrics: planning time, final plan length and
message exchange. The case studies were classified
into three groups according to the agents’ coupling
level. The problems from the satellite, logistics and
taxi were labeled as loosely, intermediate and tightly
coupled domains, respectively. The results of each
group are discussed individually and a global evalua-
tion is presented.
The first important step towards the evaluation of
the results is the definition of how many times each re-
covery activity (local repair, ask for help and central-
ized planning) was performed. The information about
recovery activities, planning time, final plan length
and message is presented in Figures 2 to 3.
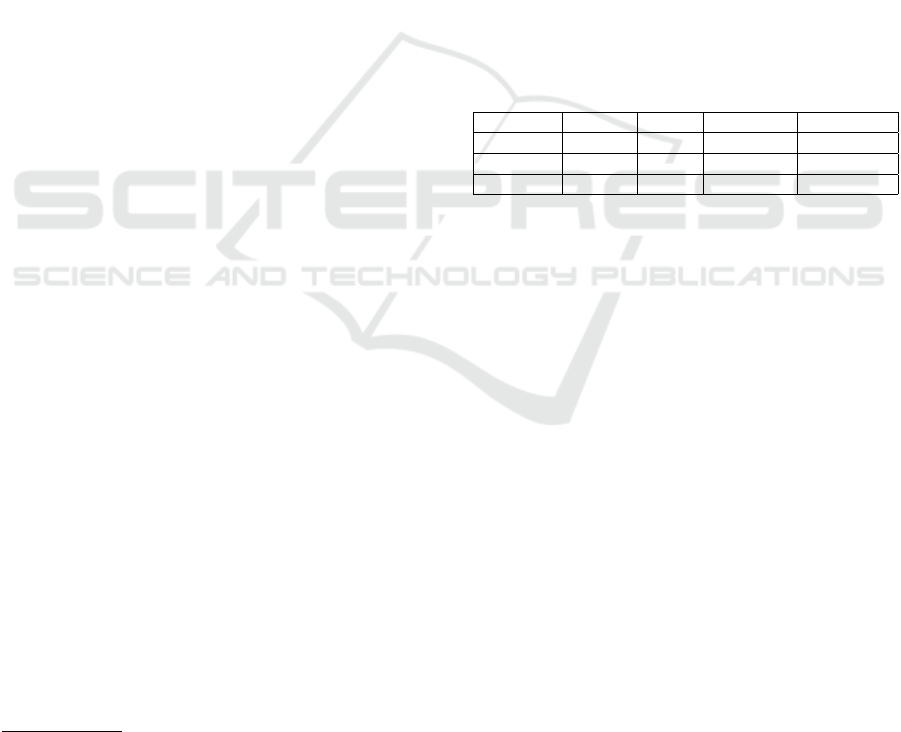
Regarding the loosely-coupled domain simula-
tions, the recovery activity was restricted to local re-
pair (Figure 2(a)). This behavior is justified by the
fact that agents carry out, at most, public actions. The
highest level of coupling is 40.2% (Table 2), hence,
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
192
agents do not depend on or affect other agents. Thus,
agents do not need to interact to solve failures. There-
fore, the motivation hypothesis that agents’ autonomy
in performing local repair is better explored in envi-
ronments with low levels of interaction is accepted.
Regarding the intermediate-coupled domain sim-
ulations, agents could not solve the failures by using
the local repair activities. Indeed, they need to interact
asking for help (Section 3.9). Sometimes, they also
need to request for the centralized planning. Those
recovery strategies are shown in Figure 2. The reason
of that justifies this different behavior in the logistic
domain simulations is inherited from the set of avail-
able actions. Thus, agents do not have all the capabil-
ities that are required to solve a problem. Hence, they
need to cooperate towards the search for a solution.
Regarding the tightly-coupled domain simula-
tions, agents needed to request more often for a cen-
tralized planning, as shown in Figure 3. The ratio of
public actions in the set of available actions was 100%
of public actions (Table 2). Thus, every action either
depends on or affects other actions. Therefore, it was
expected that the solution for the failure would only
be found by a centralized planning activity where all
actions were available in a common process.
The execution of higher recovery strategies in-
creases from loosely to tightly domains. The analy-
sis of the averages of the results from each strategy is
detailed in Table 3 by domains, which demonstrates
that: (i) the frequency of local repair calls in tightly-
coupled domains is 3.11× bigger that in loosely; (ii)
ask for help and centralized planning activities are
carried out 1.73× and 8.68× more often in tightly
than in intermediate domains. Therefore, the coupling
level among agents increases the complexity of the re-
covery process.
Table 3: Strategies calls (means) by domains.
Strategy Loosely Intermediate Tightly
Local Repair 2.73 7.76 8.5
Ask for Help 0 2.18 3.78
Centralized
0 0.28 2.43
Planning
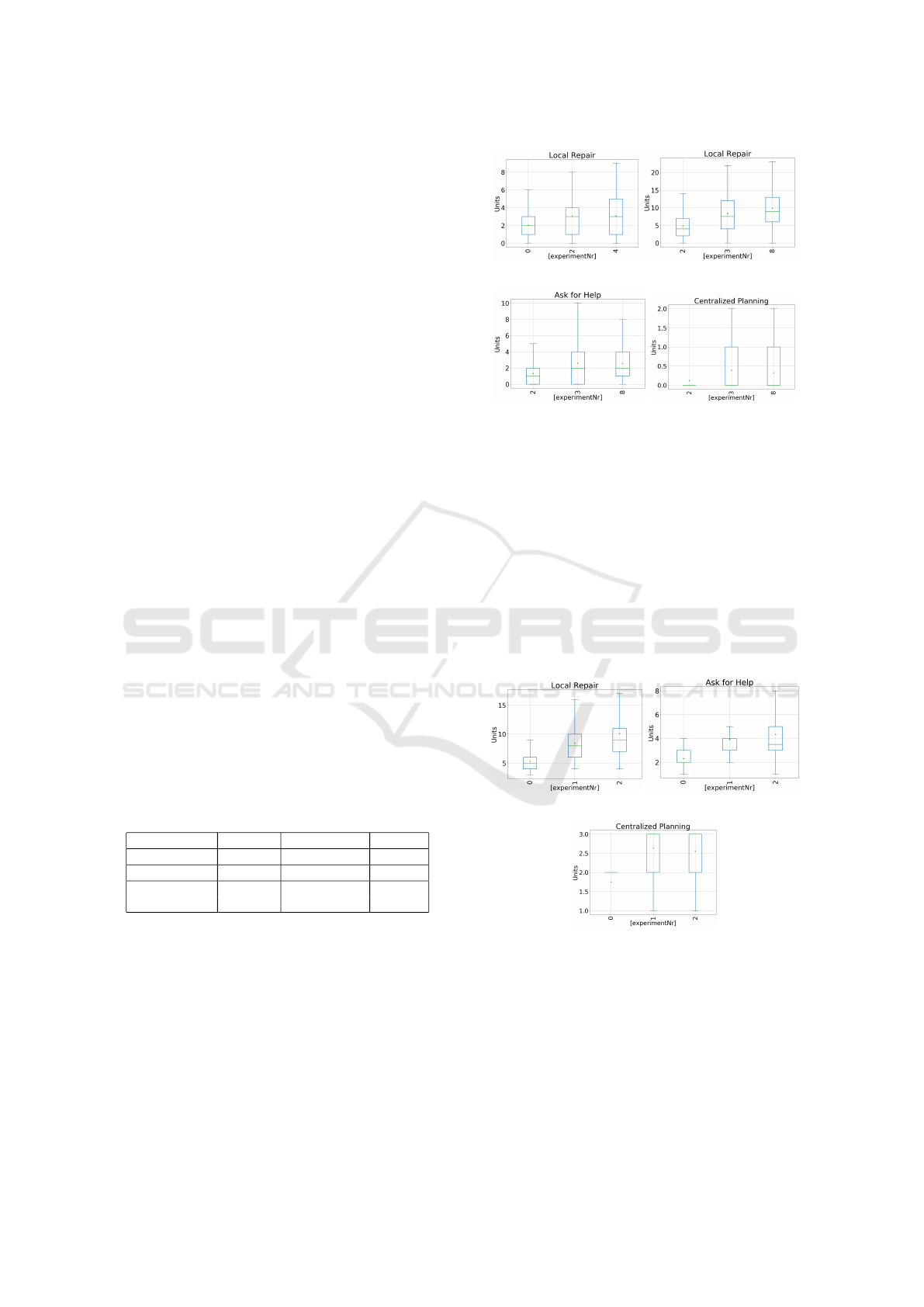
Further conclusions can be drawn from the eval-
uation of the metrics shown in Figures 4. Regard-
ing the final plan length (Figure 4(a)), although the
intermediate-coupled domain simulations have the
complexity levels (number of public actions) than
satellite domains, they presented final plans with a
higher number of actions. The logistics domain sim-
ulation applied repairing (local repair and ask for
help) more than other simulations, and that is the
reason for bigger plans. The main drawback of this
strategy derives from the fact that repairing tends to
(a) Local repair (b) Local repair
(c) Ask for help. (d) Centralized planning
Figure 2: Loosely and intermediate-coupled domains.
build bigger plans. The taxi domains highlighted
plans with fewer actions because of replanning strat-
egy (Komenda et al., 2014).
Regarding the planning time analysis (Figure
4(b)), loosely domains showed irrelevant and small
values when compared to the other groups where only
local repair was needed and repairing strategy tends
to be faster. The final planning time in logistics was
higher than the values of taxi domains since plans
were bigger. Hence, more actions were likely to fail
and more recovery activities had to be performed.
(a) Local repair (b) Ask for help.
(c) Centralized planning
Figure 3: Recovery in tightly-coupled domains.
The message exchange (Figure 4(c)) highlights
the interaction of agents after facing a failure. Since
the loosely-coupled domains handle the problem with
local repair strategy, the agents only need to exchange
message to provide a new execution coordination.
However, in the intermediate and tightly-coupled do-
mains, the amount of messages to be exchanged tends
Plan Recovery Process in Multi-agent Dynamic Environments
193
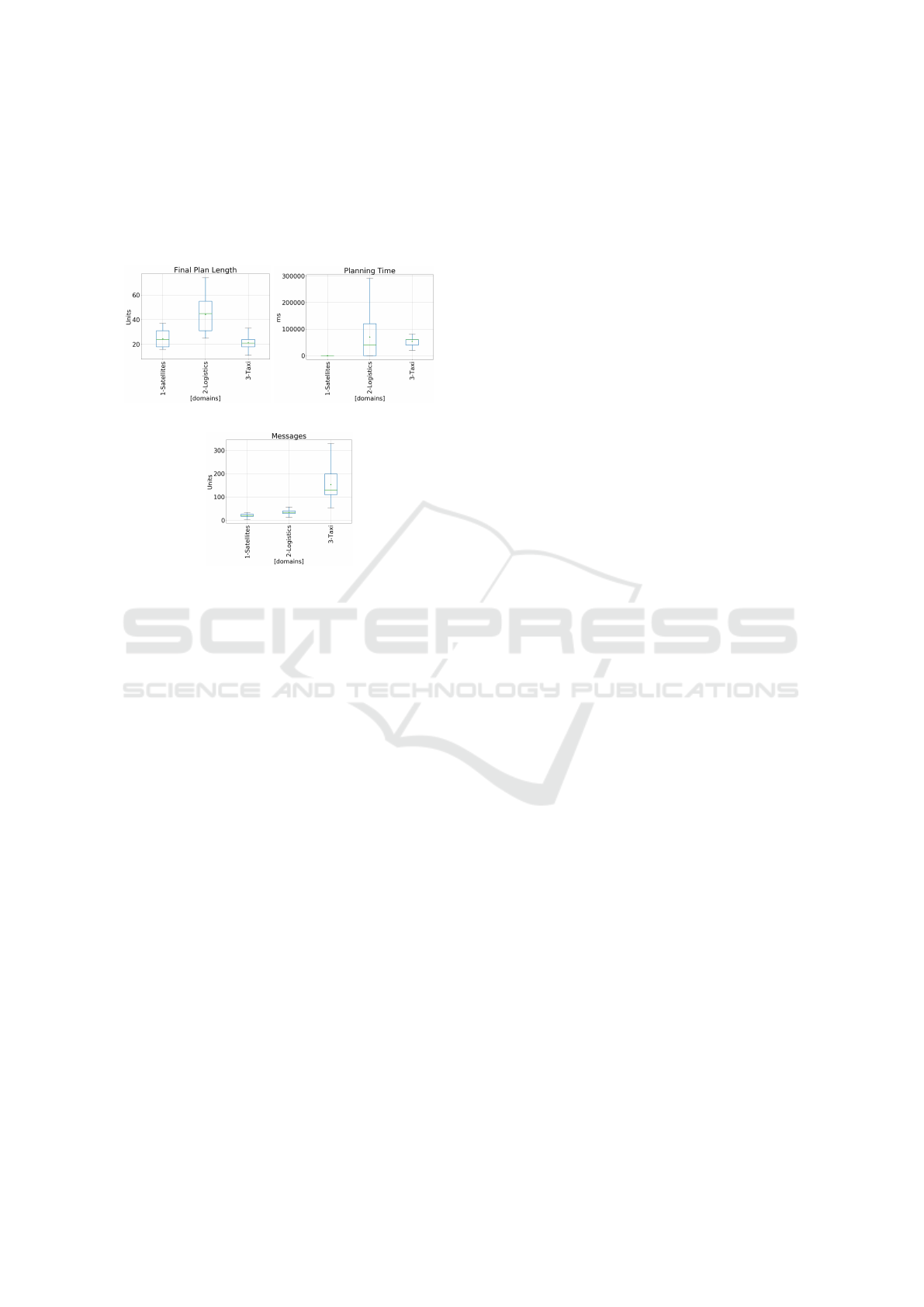
to be higher than the first one because agents needs to
ask for help and request a centralized planning with
more messages sent. Therefore, this is another ev-
idence that the hypothesis that agents’ autonomy is
better explored in environments with low levels of in-
teraction can be accepted.
(a) Final plan length. (b) Planning time.
(c) Message exchange.
Figure 4: Global evaluation.
5 CONCLUSION
In this work, a plan recovery process to dynamic envi-
ronments affected by exogenous events was proposed.
The process differs from related work because it com-
bines the replanning and repairing strategies provid-
ing an staggered solution that is formed by local re-
pair, ask for help and centralized planning.
In order to investigate the process performance,
a MAP simulation tool was developed to run differ-
ent problems. We evaluated case studies with differ-
ent levels of interaction among agents. We accepted
the motivation hypothesis that agents’ autonomy in
performing local repair is better explored in environ-
ments with low levels of interaction. Moreover, we
showed that the coupling level among agents, inher-
ited from the public actions ratio, increases the com-
plexity of the recovery and the metrics related to plan-
ning time, final length and message exchange.
The contributions of this work are: a three-phase
plan recovery process, a simulation tool, and a sta-
tistical evaluation method to MAP in dynamic envi-
ronments. The study of other failures caused by the
agents removal and the use of distributed approach to
agents’ coordination are suggestions of future works.
ACKNOWLEDGEMENTS
Prof. C. G. Ralha thanks the support received from
the Brazilian National Council for Scientific and
Technological Development (CNPq) for the research
grant in Computer Science number 311301/2018-5.
REFERENCES
(2015). Competition of Distributed and Multiagent Plan-
ners (CoDMAP). Available at http://agents.fel.cvut.
cz/codmap/, Accessed on: 2020-02-05.
Borrajo, D. and Fern
´
andez, S. (2019). Efficient approaches
for multi-agent planning. Knowledge and Information
Systems, 58:425–479.
Brafman, R. I. and Domshlak, C. (2008). From one to
many: Planning for loosely coupled multi-agent sys-
tems. In Proceedings of the International Conference
on Automated Planning and Scheduling (ICAPS),
pages 28–35. AAAI Press.
Cashmore, M., Coles, A., Cserna, B., Karpas, E., Mag-
azzeni, D., and Ruml, W. (2019). Replanning for
situated robots. In Proceedings of the International
Conference on Automated Planning and Scheduling
(ICAPS), pages 665–673. AAAI Press.
Chrpa, L., Gemrot, J., and Pil
´
at, M. (2020). Planning and
acting with non-deterministic events: Navigating be-
tween safe states. In Proceedings of the 34
th
Con-
ference on Artificial Intelligence, pages 9802–9809.
AAAI Press.
Ghallab, M., Nau, D., and Traverso, P. (2014). The actor’s
view of automated planning and acting: a position pa-
per. Artificial Intelligence, 208:1–17.
Gouidis, F., Patkos, T., Flouris, G., and Plexousakis, D.
(2018). Dynamic repairing A*: a plan-repairing al-
gorithm for dynamic domains. In Proceedings of the
10
th
International Conference on Agents and Artificial
Intelligence (ICAART), pages 363–370.
Komenda, A., Nov
´
ak, P., and Pchou
ˇ
cek, M. (2014).
Domain-independent multi-agent plan repair. Journal
of Network and Computer Applications, 37:76–88.
Mohalik, S. K., Jayaraman, M. B., Badrinath, R., and Fel-
jan, A. V. (2018). HIPR: an architecture for iterative
plan repair in hierarchical multi-agent systems. Jour-
nal of Computers, 13(3):351–359.
North, M. J., Collier, N. T., Ozik, J., Tatara, E. R., Macal,
C. M., Bragen, M., and Sydelko, P. (2013). Com-
plex adaptive systems modeling with repast simphony.
Complex Adaptive Systems Modeling.
Pellier, D. and Fiorino, H. (2018). PDDL4J: a plan-
ning domain description library for java. Journal
of Experimental & Theoretical Artificial Intelligence,
30(1):143–176.
Torre
˜
no, A., Onaindia, E., Komenda, A., and
˘
Stolba, M.
(2017). Cooperative Multi-Agent Planning: A Survey.
ACM Computing Surveys, pages 1–32.
Weiss, G., editor (2013). Multiagent Systems. The MIT
Press, 2
nd
edition.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
194
