
Urban Air Mobility (UAM): A Model Proposal based on Agents using
Netlogo
Felipe Desiglo Ferrare
a
, Derick Moreira Baum
b
, Jorge Rady de Almeida Júnior
c
,
João Batista Camargo Júnior
d
and Paulo Sérgio Cugnasca
e
Polytechnic School, University of São Paulo, São Paulo, Brazil
Keywords: Netlogo, Multi-Agent, Unmanaged Air Vehicles.
Abstract: Netlogo is a tool for creating MAS (Multi-Agent Simulations), and it is used to create simulations for multiple
areas and scenarios. With the advent of the use of manned and unmanned aerial vehicles, considering electric
vehicles known as eVTOL (electric Vertical Take-Off and Landing), multiple problems in the urban
environment appear. Also, as multiple vehicles are expected to be used to obtain urban mobility in dense
metropolitan regions around the world, the concept of UAM (Urban Air Mobility) emerges as a way to assure
environment air control. To not compromise the future of UAM, researchers were faced with the challenge of
structuring the airspace with specific air traffic rules, with separations between vehicles lower than those
currently applied, without reducing the aviation required safety levels. As testing in a real scenario is not
practical, simulation is a form to gather data and define parameters for this new system. This work aims to
present a computational tool that uses multiple agents to generate different UAM scenarios, being possible to
analyse the impact that simulation input parameters variation will cause in the safety indicators proposed in
the model.
1 INTRODUCTION
Every day, many hours are wasted by people on roads
around the world. People spend a considerable part of
their time commuting between work and home,
resulting in millions of unproductive hours every day
(Holden; Goel, 2016).
One of the biggest challenges for authorities
around the world is urban mobility. Over the years, to
make it possible to reduce travel time, especially in
metropolitan regions where congestion has become a
major problem, considerable investments have been
made in inland transport infrastructure (Patterson;
Antcliff; Kohlman, 2018).
However, with the constant increase in population
and the consequent increase in demand for transport,
in recent years the industry and scientific
communities have invested resources to create new
a
https://orcid.org/0000-0003-3896-8650
b
https://orcid.org/0000-0003-1988-6991
c
https://orcid.org/0000-0003-3839-4570
d
https://orcid.org/0000-0001-5098-6769
e
https://orcid.org/0000-0002-5675-4667
ideas to improve the performance of urban transport
(Neto et al., 2019). As a consequence, the conception
of an intelligent air transport system (UAM)
(Thipphavong et al., 2018) has the objective to
provide air transport services within a metropolitan
area to overcome the increase in surface congestion.
Types of operations include emergency medical
evacuations, rescue, humanitarian missions,
newsgathering, land flow assessment, weather
monitoring, cash deliveries, and passenger
transportation (Thipphavong et al., 2018).
Several projects are under development for
application at UAM. An example is eVTOL (electric
Vertical Take-Off and Landing), considerably
cheaper when compared to helicopters, which can be
used for inspection, transportation of valuables and
people, with a market potential of US$ 74 billion and
23,000 units by 2035 (PORSCHE, 2018). The
forecasts are that, with the use of 4,000 eVTOL,
352
Ferrare, F., Baum, D., Almeida Júnior, J., Camargo Júnior, J. and Cugnasca, P.
Urban Air Mobility (UAM): A Model Proposal based on Agents using Netlogo.
DOI: 10.5220/0010557203520359
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 352-359
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

55,000 air taxi flights will take place every day in the
United States (Booz Allen Hamilton, 2018).
To this market not be compromised in the future,
some barriers must be overcome. Some examples are
aircraft certification, noise impacts caused in urban
areas, cybersecurity protection, and the creation of an
air traffic system with characteristics different from
those displayed on conventional airspace.
The air traffic system required by UAM should be
able to handle aircraft demands far superior to those
currently existing in general aviation. Landings and
take-offs will be possible in most varied places,
increasing the complexity of managing this type of
traffic. It is evident that there is a need for new criteria
for separation between aircraft and for new vehicle
performance both in landing and on take-off
procedures and in cruising (level) procedures. In
order not to compromise the required safety indices,
new models of airspace complexity and airspace
capacity should be presented.
As the scenarios using only one or a few
coordinated eVTOLs are a majority in the literature,
this works, however, not covers real case scenarios
where we have multiple eVTOLs, not from the same
organization.
An organization that tries to be competitive and
operating multiple vehicles in the limited air space
needs to try to create the best rules to ensure fair use
of the resources in a safe way.
In this work, to simulate different UAM
scenarios, a model developed using a computational
tool based on agents (Multi-Agent System – MAS),
called Netlogo, will be presented. During the
execution of this model, based on the several
parameters used, it is possible to change the
behaviour of the system. The outputs generated,
including the number of conflicts and possible
collisions between vehicles, represent the safety
indicators for each scenario, making it possible to
establish a relationship between the inputs and the
outputs in UAM scenarios. In this modelling, all
vehicles will be considered unmanned.
Netlogo is used in a way that has a stable and
powerful simulation tool, then it is possible in an
easy way to develop the model and obtain the
problem solution and results. The system will
receive inputs (parameters) from the user and the
model developed will execute the simulation and
show the results.
We will make the development of this text as
follows. Section 2 presents the tools used in this
work: MAS and Netlogo. In Section 3 the UAM is
conceptualized. Section 4 presents the model
developed for the simulations and the criteria used
and some example results. And finally, in Sections
5 and 6, the conclusions and future work are
presented, respectively.
2 MAS AND NETLOGO
Some problems existing in the current approaches are
the difficulty to validate scenarios with more than one
vehicle and put more than one variable in an
experiment and analyse the impact of individual
variables in the whole system. And as there is no real
system in operation, the simulation is the only
feasible alternative to gather data before a real system
could be implemented.
The approach that we used, in this case, is to
provide a simulation that includes multiple intelligent
vehicles, create a model using the characteristics that
we want in a way that we could collect data close to
the real. Then, for the reasons described, it is possible
to see why this approach has been considered the best
way to tackle this problem.
MAS (Multi-Agent System) is a paradigm for the
development of intelligent systems, being a subarea
of distributed artificial intelligence, widely used in
several areas to solve complex problems in a
decentralized manner, with or without coordination
between agents. The agent-oriented paradigm is one
of the main ones used in artificial intelligence, with
the ability for multiple agents to act autonomously in
a defined environment. Several applications are
presented in the literature, including those that require
high reliability, such as aviation (Wooldridge, 2002).
In MAS multiple agents are interacting, requiring
the exchange of information between all,
collaborating to achieve, together, the same objective.
In other cases, they will work, with a certain
collaboration, to achieve individual goals, which can
sometimes even be conflicting (Wooldridge, 2002).
Netlogo is an agent-based language developed by
Wilensky (1999) that presents simple structures to
facilitate its use. Nevertheless, it is a language that
makes it possible to build several programs, with
results of different levels of complexity.
Netlogo, with its ability to be multi-agent, adds
even more simulation features while maintaining the
simplicity of the Logo with versions with 2D and 3D
simulation capabilities. Also, Netlogo has been used
in several academic works in the construction of
MAS models for different areas such as Physics and
Social Sciences (Wilensky, 2015).
However, we can find some relevant works with
agent-based approaches applied to UAM, as is the
case with eVTOLs. Most use an agent-based
Urban Air Mobility (UAM): A Model Proposal based on Agents using Netlogo
353

approach, forming a group (swarm) in which several
agents coordinate for the execution of a task (Cooley;
Wolf; Borowczak, 2019).
In some examples in the literature more complex
problems are presented, where the agents are not used
to achieve the objective in a coordinated way, with
each agent having different objectives, often
conflicting with each other. An example of this
approach is found in Liao et al. (2017), where
eVTOLs must maintain their separations in-flight
using MAS.
Alvarez-Munoz et al. (2019) use MAS to decide
whether an aircraft should use the collaboration of
other vehicles to determine its trajectories. Despite
this, it also considers the decision process based on
consensus between the aircraft and not in a
competitive scenario,
Postorino; Sarné (2020) proposed the use of MAS
to measure the impact of mobility of people,
simulating transport by air and land vehicles. This
simulation was used to measure the impacts on urban
mobility and the capacity to transport people.
Kitajima et al. (2019) use MAS to simulate the
integration between autonomous and non-
autonomous land vehicles with a focus on validating
reliability in certain scenarios, considering cases of
conflicts, cases of accidents, as well as other
parameters. It is a proposal similar to the one
presented in this work but applied to other types of
autonomous vehicles.
3 URBAN AIR MOBILITY (UAM)
Due to concerns about the time spent by people
travelling by land, mainly in places with high
population density, researchers, industry, and
authorities are looking for innovative solutions to this
problem. Therefore, in recent years there has been a
growing interest in the integration of urban air
mobility (UAM) operations around the world,
leveraging the development of new technologies and
types of aircraft and thus requiring changes in the way
of using and managing airspace (Bosson; Lauderdale,
2018; Lascara et al., 2019).
Urban Air Mobility (UAM) is a term used to
describe a system that allows air transport services on
demand, with a high level of automation, for the
transport of passengers or cargo. The predominant
vehicle in the UAM environment is the VTOL,
enabling vertical landings and take-offs in small
areas, called “vertiports”. Among the direct benefits
of replacing, when possible, land transport employing
air transport is the possibility of more direct routes
and the increase in vehicle speed. These benefits can
reduce the travel time of passengers in the current
transport system, considering the door-to-door
displacement (Patterson; Antcliff; Kohlman, 2018).
Considering the advantages presented for UAM
(traffic decongestion, improved mobility, reduced
travel time, reduced accidents, etc.), it is expected that
there will be a considerable increase in demand for
this type of service. However, for this to be possible,
in the UAM environment vehicles with different
ascending, descending, and cruising performances
are required, as well as new parameters for separation
between aircraft, new air traffic rules, and a new air
traffic control system that does not compromise
current security levels.
Companies like UBER, interested in this market
and partnership with industry and researchers, have
made vehicles with differentiated performance
possible, in addition to noise reduction and lower fuel
consumption expenses. These vehicles are called
eVTOL.
Due to the density of traffic in the UAM
environment, current ATC (Air Traffic Control)
procedures are expected to be insufficient to deal with
a large number of new UAM aircraft. This is due to
the limitations of the air traffic controllers´ workload
and the minimum necessary separation distances
between the aircraft. Likewise, the design of airspace
and current flight routes restricts UAM's access to
significant parts of airspace above metropolitan areas
(Vascik; Hansman, 2018).
Thus, some needs so that the future of UAM is not
compromised are the availability of land
infrastructure geographically distributed in areas
where there is demand from customers, the
integration of urban air transport operations with Air
Traffic Control (ATC), and the potential need for a
new automated ATC system to manage airspace
below 3,000 feet (Vascik; Hansman, 2017),
integrating airspace in a UAM environment with
other existing airspaces.
This integration should under no circumstances
compromise the levels of security expected in
aviation as a whole.
Researchers around the world are aware of the
challenges presented by UAM. The characteristics of
the aircraft, the landing and take-off locations, as well
as the demand projections, which create highly dense
air spaces, compel the aeronautical community, in
particular researchers and air traffic authorities in all
countries, to propose new separation criteria, new air
traffic rules and new models of complexity and
airspace capacity.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
354
In Neto et al. (2019) a computer simulation tool
was presented to measure the safety and effectiveness
of trajectory-based UAM operations, considering the
presence of manned and unmanned eVTOL vehicles.
In Baum et al. (2018) it was presented the concept
called TML (Technology Maturity Level) related to
the familiarization of ATCo (Air Traffic Controller)
with unmanned aerial vehicles. From the simulation
of different scenarios with the gradual increase of
unmanned aircraft, it was proposed to gradually
increase the ATCo's familiarity with these unmanned
aircraft. Although the VTOL can be manned or
unmanned, all concepts presented in this work will be
based on unmanned aircraft.
The airspace where the UAM takes place in
particular, and the concepts currently applied in air
traffic can compromise the future of this market, such
as, for example, the minimum separation applied
between the aircraft can make it not viable. But
knowing the relationship between the demand for
eVTOL, its performances, and the safety indexes
applied in aviation, we can try to define the number
of aircraft that will be able to fly simultaneously
safely, which is still a desire and a challenge for all
researchers.
4 DEVELOPED MODEL
For the development of the model, Netlogo 3D
version 6.1.1 was used. The proposal was to enable
the creation of numerous UAM scenarios with the
possibility of varying many proposed inputs. Thus, it
will be possible to establish the relationship between
the variation of a given "input" with the "outputs"
resulting in the simulation.
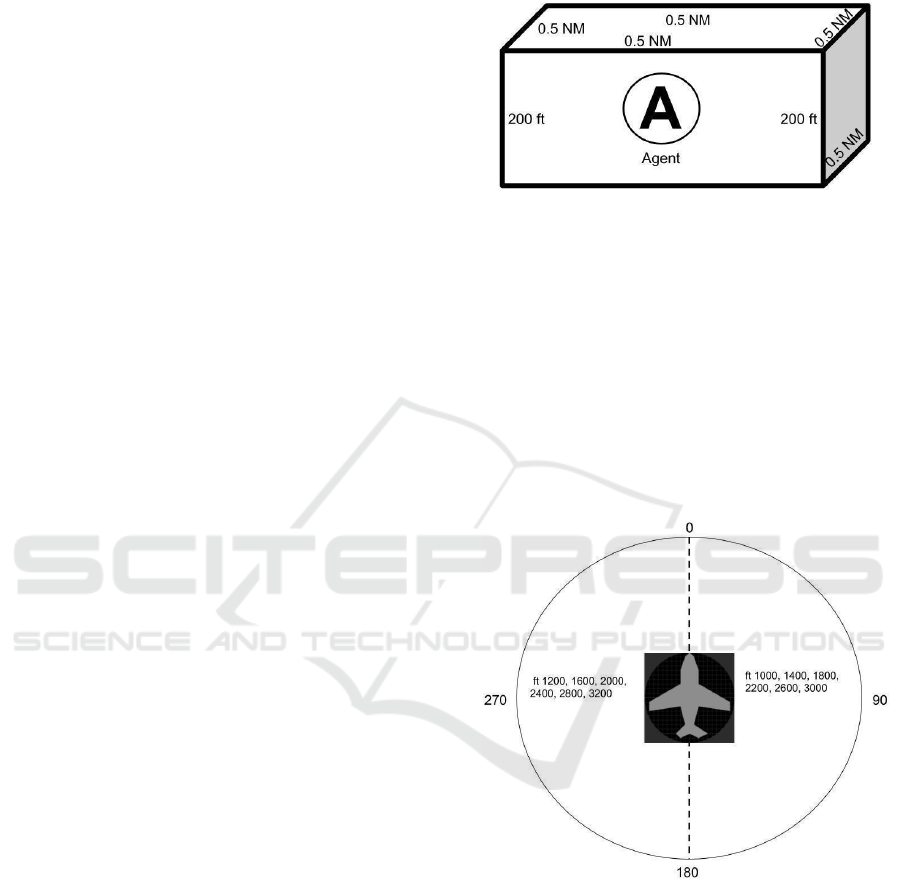
4.1 Model Description
Aircraft generation and landing and take-off locations
occur stochastically within the limits of the proposed
scenarios. Considering that 1 NM (Nautical Mile)
equals 1.852 km and 1 ft (feet) equals 0.3048 m, the
dimensions shown are 30 NM x 30 NM or 15 NM x
15 NM, from 1000 ft to 3200 ft above the landing and
take-off location. Each scenario is divided into
0.5NM x 0.5NM squares horizontally and 200 ft
vertically.
This difference in the feet and Nautical Mile is
because these are the most common distances in the
aeronautical field and is necessary a smaller distance
vertically to make the system secure, because of that
the area is not a cube with equal sides and have
different distances horizontally and vertically. We
can see this division in Figure 1.
Figure 1: Illustration of the agent environment.
The air traffic rules included in the model, such as
minimum horizontal and vertical separation, rate of
climb and descent, speed when the aircraft is on a
level (cruising speed) and altitude that it can maintain
depending on the magnetic course it will use on the
flight, as shown in Figure 2, that are presented in Neto
et al. (2019). A new rule proposed in this work is the
interdiction of the squares above the aircraft landing
and take-off location, preventing other aircraft from
crossing this air space whenever an aircraft is
performing an approach or take-off procedure
.
Figure 2: Division of altitude ranges by heading.
Figure 3 presents the graphical interface
developed in Netlogo, where the green “buttons” are
all the “inputs” that may be affected, making it
possible to create numerous UAM scenarios.
Figures 4 and 5 show in more detail how the input
interfaces look like. And Figure 6 shows in detail the
output interface with text items and the graphs that
show the variation during each iteration of the
simulation.
Urban Air Mobility (UAM): A Model Proposal based on Agents using Netlogo
355
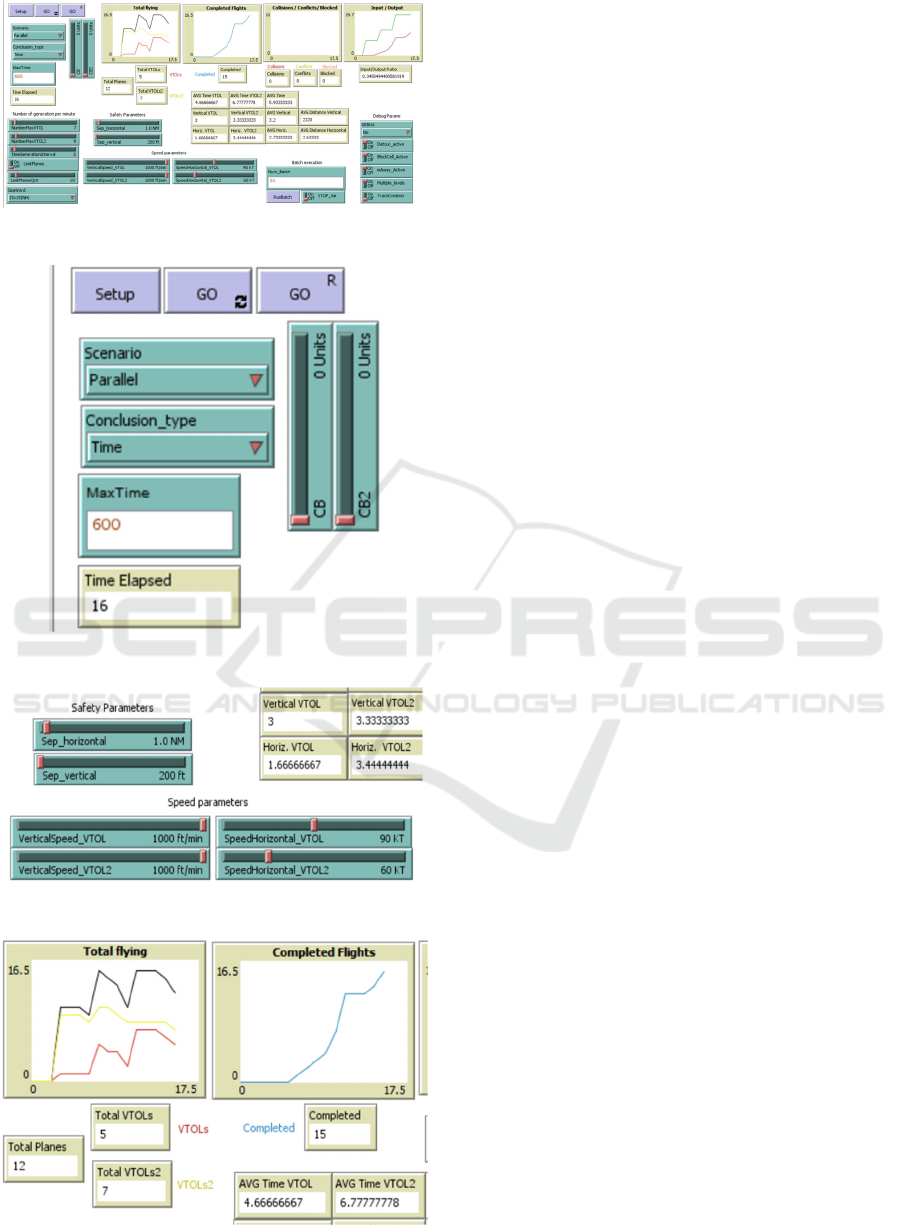
Figure 3: Netlogo graphical interface.
Figure 4: Netlogo controls interface detail.
Figure 5: Netlogo velocity controls interface detail.
Figure 6: Netlogo execution interface detail.
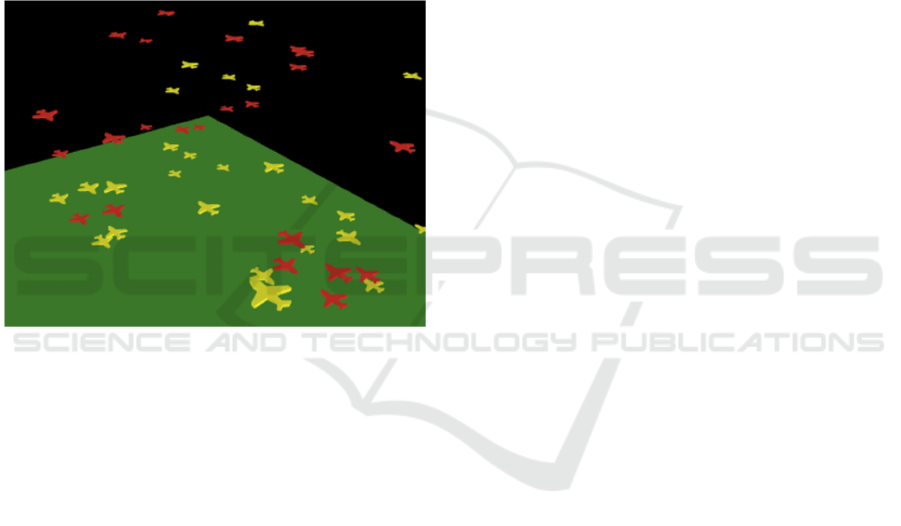
Figure 7 shows the model in execution, with the
agents (aircraft) in 3D. The VTOLs types 1 and 2 are
presented by the different colours (yellow and red) in
the model. These vehicles could have the same or
different parameters as the number of vehicles in the
airspace and different velocities (vertical and
horizontal), as to simulate vehicles as fast small
delivery and slow big passenger vehicles.
The inputs proposed in this model are:
1) Scenarios: the scenarios describe the formats
of the trajectories, which can be classified in
parallel, perpendicular, and general (in any
direction), relative to the other planes in the
same level;
2) Simulation time: the time may vary according
to the analysis that will need to be performed;
3) The number of VTOL1 and VTOL2: in the
simulation two different types of VTOL are
possible, being at the discretion of the
researcher how the horizontal and vertical
speeds will be varied. Thus, it will be possible
to maintain aircraft with different
performances in the environment so that the
impact on the safety indices presented
analysed;
4) Aircraft generation interval: it is possible to
vary the aircraft entry interval, making air
space increasingly dense;
5) Safety parameters: it is possible to vary the
minimum horizontal and vertical separation so
that the impact on safety indices is analysed.
Although the necessary separations between
aircraft in UAM airspace are being proposed
by different entities, the values used in this
investigation consider the reference present in
the literature (Neto et al., 2019; Booz Allen
Hamilton, 2018), that is, 0.5 NM horizontally
and 200 ft vertically;
6) Vertical and horizontal speed: the vertical
speeds (rate of ascent and descent) and
horizontal of the VTOL1 and VTOL2 may be
varied to increase the complexity of the
airspace and verify the impacts on the safety
indexes.
The “outputs” proposed in this model, which can
be called security indexes, are:
1) Completed trips: traffic will be considered
complete when it takes off and lands within
the simulation time. If the environment
becomes more complex, forcing the aircraft to
wait to comply with safety parameters, the
number of traffic completed may vary;
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
356
2) Collisions: traffic should, in principle, always
be kept in different squares (0.5 NM x 0.5 NM
and 200ft horizontally). However, depending
on the level of complexity generated in the
scenario, these minimums may be
compromised. If two aircraft are in the same
grid, a collision is considered;
3) Conflicts: conflicts are considered when the
aircraft does not comply with the minimum
horizontal and vertical separation presented in
the safety parameters;
4) Blocked aircraft: is the computation of the
number of aircraft that will maintain their
position for more than 10 min in order not to
enter restricted airspace.
Figure 7: Running Graphical View of the 3D agent model.
Considering that the generation of the scenarios is
stochastic, it is necessary to perform a considerable
number of tests per scenario for the analyses to be
correctly performed. For this purpose, the “batch”
function was created in the model, making it possible
to define the number of experiments for the proposed
scenario, exporting the data from the multiple
simulations to CSV, making posterior analysis
possible.
4.2 Model Validation
For model validation, air traffic specialists analysed
each proposed scenario by comparing the results
obtained with the expected results. Considering that
all landing and take-off locations are stochastically
defined, to enable the analysis, the following
validation outputs were created:
1) Average Vertical Distance: average vertical
distance, of all simulation aircraft, between the
landing and take-off location and the cruising
level;
2) Average horizontal distance: average
horizontal distance of all aircraft in the
simulation, between landing and destination;
3) Average horizontal flight time: it is the
average time used by all aircraft at the cruise
level;
4) Average vertical flight time: it is the average
time used by all aircraft in the ascent and
descent procedures;
5) Total average time: is the sum of the average
time used by all aircraft;
The model used was validated and considered
ready for the simulation when it was found that the
behaviours of the agents (aircraft) and the outputs
generated were compatible with the chosen
performances, as well as with the other parameters
used.
4.3 Example Case
For example, we could have a sample execution using
only VTOL1 with 400ft/min and 90KT using
simulation, putting between 0 and 3 new vehicles
every 3 minutes, running each simulation for 600
minutes. Using a travelling environment of 15 NH x
15 NH. Executing this simulation 100 times, we could
take some median values of each execution.
In this sample, we have 220.48 finish planes per
run (with a standard deviation of 14.23). These planes
run in the median of 2593.15 ft (with a deviation of
83.82) and take 6.99 minutes in the median (with a
deviation of 0.20).
Taking this value, we can see that a plane running
in a 400ft/min for 6.99 minutes will take a distance of
2794.32 ft. We could see that our median value is
7.2% less than that because the vehicles could not use
the full velocity or have to stop and wait, this is the
loss of performance by having multiple vehicles
sharing the same airspace.
5 CONCLUSIONS
Due to the high population density in several
metropolises, researchers, industry, and authorities
are faced with the challenge of solving the problem of
urban mobility. Thus, the concept of UAM (Urban
Air Mobility) emerges and, with it, countless new
challenges for the viability of its future.
The vehicles proposed for use at UAM have
performance for vertical landings and take-offs,
called VTOL, with the electric version called eVTOL.
These vehicles have operational conditions to land
Urban Air Mobility (UAM): A Model Proposal based on Agents using Netlogo
357

and take-off in small areas, called “vertiports” in the
literature.
Conventional aviation has well-defined landing
and take-off procedures, with separations between
aircraft applied without impacting the system's
capacity and with a well-defined strategy for traffic
and airspace management. However, if we use such
concepts, the future of UAM will be compromised. It
is a consensus among researchers from all over the
world that the parameters and equipment used, for
example, in air traffic control of commercial aviation
are not applicable at UAM, making all operations
unfeasible.
New models of complexity and airspace capacity
should be developed based on the operational
characteristics of eVTOL. In this work, to simulate
UAM scenarios, a model was presented using
Netlogo. In the model it is possible to vary several
parameters ("inputs"), checking their impact on the
simulation results ("outputs"). After an exhaustive
process of checks by air traffic specialists and
successive calibrations, the model proved to be
satisfactory for simulating UAM scenarios.
Using this model, we could validate ideas from
the literature of how the system should behave and
validate all the parameters and impact in the system.
6 EXPECTED RESULTS AND
FUTURE WORK
With the presented model, it is possible to generate
several scenarios, checking what is the impact on the
results when there is a variation of the input
parameters.
The results of the simulations will be used in the
future for the development of an airspace complexity
model. The studies sought to define the relationship
between the variation of "inputs" and the increase in
the complexity of airspace and the consequent impact
on its capacity.
In the future, it will also be verified what is the
appropriate limit of minimum horizontal or vertical
separation between eVTOLs without compromising
the level of security required for aviation. This is
possible since any variation in the proposed safety
parameters changes the model's “outputs” and can be
considered as safety indicators, presented in this work
as “completed”, “collisions”, “conflicts” and
“blocked”.
REFERENCES
Alvarez-Munoz, J. U.; Castillo-Zamora, J. J.; Escareno, J.;
Boussaada, I.; Mendez-Barrios, F.; Labbani-Igbida, O.
Time-delay control of a multi-rotor VTOL multi-agent
system towards transport operations. 2019 International
Conference on Unmanned Aircraft Systems, ICUAS
2019, p. 276–283, 2019.
Antcliff, K. R.; Moore, M. D.; Goodrich, K. H. Silicon
Valley as an early adopter for on-demand civil VTOL
operations. 16th AIAA Aviation Technology,
Integration, and Operations Conference, p. 1–17, 2016.
Baum, D.; Neto, E. C. P.; Rady, J. A.; Cugnasca, P.; Junior,
J. B. C. A Mindset-Based Evolution of Unmanned
Aircraft System (UAS) Acceptance into the National
Airspace System (NAS). v. 55, n. 11, 2018.
Booz Allen Hamilton. Urban Air Mobility - NASA
Executive Briefing. 2018.
Bosson, C. S.; Lauderdale, T. A. Simulation evaluations of
an autonomous urban air mobility network
management and separation service. 2018 Aviation
Technology, Integration, and Operations Conference, p.
1–14, 2018.
Cooley, R.; Wolf, S.; Borowczak, M. Secure and
Decentralized Swarm Behaviour with Autonomous
Agents for Smart Cities. 2018 IEEE International Smart
Cities Conference, ISC2 2018, p. 1–8, 2019.
Holden, J.; Goel, N. Fast-Forwarding to a Future of On-
Demand Urban Air Transportation. p. 1–98, 2016.
Available in: <https://www.uber.com/elevate.pdf>.
Kitajima, S.; Shimono, K.; Tajima, J.; Antona-Makoshi, J.;
Uchida, N. Multi-agent traffic simulations to estimate
the impact of automated technologies on safety. Traffic
Injury Prevention, v. 20, n. sup1, p. S58–S64, 2019.
Lascara, B.; Lacher, A.; Degarmo, M.; Maroney, D.; Niles,
R.; Vempati, L. Urban Air Mobility Airspace
Integration Concepts. 2019. Available in:
<https://www.mitre.org/sites/default/files/publications/
pr-19-00667-9-urban-air-mobility-airspace-
integration.pdf>.
Liao, F.; Teo, R.; Wang, J. L.; Dong, X.; Lin, F.; Peng, K.
Distributed Formation and Reconfiguration Control of
VTOL UAVs. IEEE Transactions on Control Systems
Technology, v. 25, n. 1, p. 270–277, 2017.
Neto, E. P. C.; Baum, D. M.; Junior, J. R. De A.; Cugnasca,
J. B. C. J. P. S. Trajectory-Based Urban Air Mobility
(UAM) Operations Simulator (TUS). Quality, 2019.
Patterson, M. D.; Antcliff, K. R.; Kohlman, L. W. A
proposed approach to studying urban air mobility
missions including an initial exploration of mission
requirements. Annual Forum Proceedings - AHS
International, v. 2018- May, 2018.
Porsche. The future of vertical flight. 7th Asian/Australian
Rotorcraft Forum, ARF 2018, 2018.
Postorino, M. N.; Sarné, G. M. L. Reinventing mobility
paradigms: Flying car scenarios and challenges for
urban mobility. Sustainability (Switzerland), v. 12, n. 9,
p. 1–16, 2020.
Thipphavong, D. P.; Apaza, R. D.; Barmore, B. E.; Battiste,
V.; Belcastro, C. M.; Burian, B. K.; Dao, Q. V.; Feary,
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
358

M. S.; Go, S.; Goodrich, K. H.; Homola, J. R.; Idris, H.
R.; Kopardekar, P. H.; Lachter, J. B.; Neogi, N. A.; Ng,
H. K.; Oseguera-Lohr, R. M.; Patterson, M. D.; Verma,
S. A. Urban air mobility airspace integration concepts
and considerations. 2018 Aviation Technology,
Integration, and Operations Conference, 2018.
Vascik, P. D.; Hansman, R. J. Constraint Identification in
On-Demand Mobility for. MIT International Center for
Air Transportation (ICAT), n. June, 2017.
Wilensky, U. NetLogo. http://ccl.northwestern.edu/
netlogo/. Center for Connected Learning and
Computer-Based Modelling, Northwestern University,
Evanston, IL, 1999.
Wilensky, U. Airplane Landing Example 3D.
https://ccl.northwestern.edu/netlogo/models/AirplaneL
andingExample3D. Center for Connected Learning and
Computer-Based Modelling, Northwestern University,
Evanston, IL, 2017.
Wooldridge, Michael J. An introduction to multiagent
systems. ISBN 0-471-4969 I-X. Ed. Wiley, 2002.
Urban Air Mobility (UAM): A Model Proposal based on Agents using Netlogo
359
