
Context-aware Social Robot Navigation
Frederik Haarslev
* a
,William Kristian Juel
* b
, Avgi Kollakidou
c
,
Norbert Kr
¨
uger
d
and Leon Bodenhagen
e
SDU Robotics, University of Southern Denmark, Campusvej 55, Odense C, Denmark
Keywords:
Mobile Robots, Robot Navigation, Costmaps, Context Awareness.
Abstract:
With the emergence of robots being deployed in unstructured environments outside the industrial domain,
the importance of robots behaving appropriately in the vicinity of people is becoming more clear. These
behaviours are hard to model as they depend on the social context. This context includes among other things
where the robot is deployed, how crowded that place is, as well as who are residing in that place. In this paper
we extend social space theory with the social context, making them adaptable to the current situation. We
implement the social spaces as costmaps used in the standard ROS navigation stack. Our method – Context-
Aware Social robot Navigation (CASN) – is tested in the context of people avoidance in social navigation.
We compare CASN with the social navigation layer package, which also implements costs based on detected
people. We show that by using CASN a mobile robot complies with social conventions in four different
navigation scenarios.
1 INTRODUCTION
Robots are becoming an integrated part of our soci-
ety and already millions of robots are in operation
around the world today (IFR, 2020). In the past,
robots were highly relegated to controlled and static
environments, but they are now also showing promis-
ing results in unconstrained areas of society such as in
hospitals (Riek, 2017; ?). These robots will be part of
our lives, operate in close proximity to us and interact
with us on a daily basis. A reason why mobile robots
are not used more in society is that standard naviga-
tion systems do not differentiate between humans and
objects and therefore completely ignore social aspects
of navigation.
Traditionally, path planning for mobile robots is
about solving for the least costly path and such meth-
ods do not utilize semantic information (Marder-
Eppstein et al., 2010). These methods will create a
collision free path but can result in inadequate robot
behavior such as driving to close to humans which
may make them feel unsafe.
a
https://orcid.org/0000-0003-2882-0142
b
https://orcid.org/0000-0001-5046-8558
c
https://orcid.org/0000-0002-0648-4478
d
https://orcid.org/0000-0002-3931-116X
e
https://orcid.org/0000-0002-8083-0770
*
Equal contribution between the authors
In unconstrained environments where people and
robots work around each other, the robots must be
context-aware and comply with social conventions for
efficient navigation in order to fit in. This means
that the robot must understand proxemics and navi-
gate using semantic information about their surround-
ings. Spaces can be free or occupied, but some spatial
regions might also be part of a social context which
needs to be taking into account for socially aware nav-
igation. In this work we explore using costmaps to put
mobility constraints for navigating around humans,
and we define how to derive adequate robot behaviors
based on the spatial relations between humans and a
robot. We define two types of spaces that are par-
ticularly relevant and these will be mapped into the
costmap: the personal and social space.
According to (Hall, 1966) the space near an indi-
vidual person can be modelled as consisting of four
concentric circular areas with varying distance, with
the two inner space being shown on fig. 1a. The in-
timate space is defined by (Hall, 1966) as a space for
embracing and touching and is reserved for people
you know. The personal space is typically an area for
interacting with friends and family. The social space
is outside arms reach and the region where interaction
with acquaintances happen. People engaging in social
interaction, share each other’s social spaces and tend
to form and maintain distinct spatial structures. In the
426
Haarslev, F., Juel, W., Kollakidou, A., Krüger, N. and Bodenhagen, L.
Context-aware Social Robot Navigation.
DOI: 10.5220/0010554204260433
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 426-433
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

(a) (b)
Figure 1: (a) The three inner regions of the personal space
model by Hall. (b) Example of an F-Formation by Kendon.
case of static social arrangements, (Kendon, 1990) in-
troduces F-Formations, see fig. 1b. F-Formations de-
scribe the arrangement of people (e.g. face-to-face,
side-by-side and circular arrangement), as well as the
emerging social spaces. The o-space describes the
space between all group participants, is reserved for
interaction and should not be penetrated. The p-space
engulfs the o-space and the space occupied by the par-
ticipants of the group.
While this social space theory can serve as guide-
line for social robot navigation using costmaps, some
key ideas are missing when it comes to how it should
be implemented. Many factors affect how the robot
should navigate around people, including the size and
shape of the robot, the job of the robot (should it
avoid or approach people), and if the people are mov-
ing. These factors we broadly define as the context in
which the robot operates in.
This paper integrates our previous work in
(Juel et al., 2020) and introduces a method for
Context-Aware Social robot Navigation (CASN) us-
ing costmaps. The contributions of this paper are as
following:
1. We implement context-aware social navigation by
putting mobility constraints for navigating around
humans using collision detection.
2. We integrate context in the creation of costmaps
and show how a robot uses this to comply with
social conventions for efficient navigation.
3. We show that our system outperforms an open
source ROS implementation.
In the following sections we describe the state
of the art in social navigation (section 2); we define
the context and how we use it in costmaps for social
navigation (section 3); we test our implementation in
four scenarios, and compare it to an open source ROS
implementation (section 4); and we conclude on our
findings (section 5).
2 RELATED WORK
With the increase of robots operating in spaces popu-
lated by humans, the exploration of navigation meth-
ods that consider and incorporate social norms has
seen a peak of interest. Different approaches have
been attempted to understand or model human be-
haviour – whether static, dynamic or in groups – and
navigate accordingly. Costmaps are widely used to
accomadate for socially aware motion planning and
navigation by the introduction of non-lethal costs to
represent social spaces. (Lu et al., 2014) proposed the
layering of costmaps, each containing semantic infor-
mation for a specific property or subject such as obsta-
cles, inflation or proxemics. The proxemic layer, with
which this work is mainly compared, utilises the posi-
tion and velocity of detected people to create a Gaus-
sian distribution of costs around them (Kirby et al.,
2009). The cost is elongated in the detected peoples
direction of movement.
Layered costs with semantic information are also
implemented by (Mateus et al., 2019) which used
asymmetric Gaussian function costs. An attempt
to adjust costmaps was made by (Scandolo and
Fraichard, 2011) by incorporating predictions for dy-
namic social scenarios. (Ram
´
ırez et al., 2016) pro-
posed an inverse reinforcement learning method to
obtain the optimal path to approach both static and
dynamic people according to their poses and veloc-
ities, which was then incorporated in a path planner
which layered the acquired information with other
layers. Alternatives to the costmap based approaches
has also been suggested. (Mead and Matari
´
c, 2017)
used Hall’s proxemics definitions (Hall, 1966), to de-
velop and evaluate a proxemic goal-state estimation
and cost-based trajectory planner. (Bordallo et al.,
2015) and (Khambhaita and Alami, 2020) attempt to
predict the intentions or trajectories of human actors
in the robot environment and adjust the motion plan-
ning accordingly. Similarly, we incorporate a colli-
sion detector dependent on data predicted by tracking
the position and velocities of humans and robot.
Although the community has addressed the issues
of semantic mapping or human-aware navigation with
various approaches, we see that the navigation re-
sults do not always comply with social conventions
and work only in constrained or controlled situations.
Similar to (Lu et al., 2014), we implement a layered
costmap-based method which proactively detects col-
lisions or invasions of social spaces. The velocities
of humans and robot are used to project the costs and
allow the robot enough time to change its plan.
Context-aware Social Robot Navigation
427

3 CONTEXT-AWARE
NAVIGATION
The method proposed in this paper uses social space
theory by (Hall, 1966) and (Kendon, 1990) to put
costs around humans in a costmap. We modify this
theory based on the context of the robot in a given sit-
uation. In the following we define notation for the
context which we use in CASN (section 3.1), give
a description of how we derive the cost functions
(section 3.2) and show how this is implemented in
costmaps (section 3.3).
3.1 Context
The mapping of the spaces defined by (Hall, 1966)
and (Kendon, 1990) can broadly be defined as includ-
ing context in a navigation strategy. Context covers
all aspects that go beyond the description of a robots
specific task, e.g. the cultural background, type of
building or even the time of the day. The robot be-
havior can be expected to depend on aspects of the
context that can be considered static in a given situa-
tion, including the physical environment or the type of
the overall situation in the environment of the robot.
Other relevant parameters – which are the focus of
this paper – are dynamic, such as the crowdedness of
the scene, the current task of the robot, or the role of
individuals in an interaction.
The static parameters, E
S
, describing the context
are not immediately dependent of the robot’s sensory
input and are expected to remain constant during the
robot’s operation:
E
S
= {E
B
,E
M
,E
R
,...} (1)
where E
B
denotes the type of the building (e.g.,
whether it is a public accessible or not), E
M
the mis-
sion of the robot, and E
R
reflects the size and appear-
ance of the robot. Dynamic parameters E
D
will be
described as functions of an observation of a human,
h. These functions includes aspects essential for be-
ing able to achieve an appropriate navigation strategy,
E
r
(h), as well as the configuration of a human, and
the local density of humans, E
d
(h).
E
D
= {E
r
,E
d
,. ..} (2)
To allow for a concise notation in section 3 the
following,
E = {E
D
,E
S
} (3)
denotes the combined context information, including
both static and dynamic aspects.
3.2 Personal and Social Costs
The personal space is mapped to the costmap using a
cost function which depends on the context, E, which
oftentimes can be considered constant during a single
interaction. The cost, C
p
, for occupying a point x is:
C
p
(x,h|E) =
∑
j={i,p}
k
h, j
(x,h|E) (4)
where k
h,i
(·), k
h,p
(·) represents the cost model of the
intimate and personal spaces associated with the prox-
imity between the point x and the person h, given the
context E.
When modelling the social space, we consider the
o- and p-spaces. However, how these spaces are re-
flected in a costmap in a specific situation depends
highly on the context, i.e. the cost for entering a
groups o-space would be low if an interaction with
the group is intended, but high if the robot just has
to traverse the area. The cost function modelling the
social spaces is therefore formulated as a sum of the
three spaces:
C
g
(x,g|E) =
∑
i={o,p}
k
g,i
(x,g|E) (5)
where g denotes the group formation. The spatial
structure of the o- and p-space of the individual group
is modeled by k
g,o
(·) and k
g,p
(·) respectively. The ac-
tual cost, C
tot
, for occupying a point p is then defined
by the sum of the individual spaces:
C
tot
(p|E) =
∑
h
C
p
(p, h|E) +
∑
g
C
g
(p, g|E) (6)
3.3 Context-aware Costmaps
In this section we show how the social space theory
is implemented as costmaps used in the ROS navi-
gation stack with four scenarios: 1) A robot is nav-
igating around a static person 2) A robot is navigat-
ing around a static group 3) A robot on a collision
course with a person moving straight towards it 4) A
Robot on a collision course with a person crossing its
path orthogonally. In these four scenarios the static
context, E
S
, of the robot is to avoid people in a so-
cially acceptable manner. For each scenario we com-
pare our method to the ROS open-source method so-
cial navigation layers (SNL)
1
that follows the same
scheme as us by putting cost to restrict robots from
maneuvering close to humans.
1
http://wiki.ros.org/social navigation layers
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
428

(a) (b)
(c) (d)
Figure 2: (a) Top down view of the experimental setup. (b)
Detection image. (c) CASN and (d) SNL method for setting
cost around a static person.
We first consider the simple case of a person
standing statically in the robot’s path (fig. 2a). The
robot uses the detection and tracking system de-
scribed in (Juel et al., 2020) to get a 3D estimation
of the position and velocity of the person in its field
of view. The velocity estimation of the person be-
ing 0 m/s, defines the contextual state of the person,
E
s
(h), as standing still. Given this context, the cost
function becomes:
k
h, j
(x,h) =
(
c
j
if |x − h| < r
j
0 otherwise
(7)
where r
j
is the radius of the given space (personal or
intimate), and c
j
is the cost value we assign this space.
SNL makes a cost gradient around the detected
person (fig. 2d), which shape is controlled by three
parameters: amplitude, variance and cutoff. The pa-
rameters are set such that the radius of the gradient
matches the radius of our cost model, while the cost at
the personal and intimate space radii are the same. To
avoid having the results influenced by sensor modal-
ity, we created a bridge which translates the detec-
tions to match the output of the leg detector which
SNL was build for. Thereby, we can directly compare
our method to SNL.
Next we consider the group scenario (fig. 3),
where two people stands at each side of the robots
path. As the context is to avoid interrupting social
interactions, the robot should not drive through the
group. This is done by assigning costs to the o- and
p-space. The potential interaction between humans
is detected using an algorithm which clusters peo-
ple based on their positions and orientations. Fol-
lowing Hall’s social areas (Hall, 1966), the maxi-
(a) (b)
(c) (d)
Figure 3: (a) Top down view of the experimental setup. (b)
Detection image (c) CASN and (d) SNL method for setting
cost around a group.
mum distance between potential interlocutors is set
to 3m. Individuals are rewarded if they are looking
towards each other, thus exploiting the individual’s
line of sight (LoS) as well as their positions. Further-
more, potential focus points (FP) are detected using
a separate clustering of LoS intersections. Individu-
als who are found to have the same FP are rewarded
as well, making it more likely for them to be clus-
tered together. As individuals are sorted in potential
groups, the o-space, specifically its center point and
radius, is calculated.
As with the personal spaces, the social space cost
function is constant within the group radius:
k
g,i
(x,g) =
(
c
i
if |x − g| < r
i
0 otherwise
(8)
where r
i
is the radius of the given space (o or p), and
c
i
is the cost value we assign this space.
Once again the velocity estimations are used to de-
duce that the people are static, thereby giving E
s
(h).
Therefore, k
h
is defined as in eq. (7). Structuring the
cost like this (fig. 3c) forces the robot to drive around
the group to avoid interrupting. The SNL method is
not made to model group costs and therefore does not
not prevent the robot to plan through the formation
and thereby interrupting (fig. 3d).
Figure 4 shows a scenario where a person is walk-
ing directly towards the robot. Without using our
method or SNL, the costmap implementation in ROS
creates an inflated cost around each object detected
in the sensor data, not distinguishing between people
or inanimate objects. It also does not have a concep-
tion of dynamic objects, making the path planner plan
around the objects current, and not future, position.
Context-aware Social Robot Navigation
429

(a) (b)
(c) (d)
Figure 4: (a) Top down view of the experimental setup. (b)
Detection image (c) CASN and (d) SNL method for setting
cost around a moving person.
SNL remedies this by elongating the cost gradient in
the direction of movement (fig. 4d), making the robot
act on the approaching person quicker.
In our method we detect collision points between
the robot and the detected people, and plan around
those points. Given the context that the person is
walking directly towards the robot, we modify k
h
to
use the collision point,
ˆ
h, as input instead of the per-
sons current position h. One strategy could be to de-
fine
ˆ
h as lying on the vector, ~v, from the robots po-
sition, r to h, giving
ˆ
h = h − p~v, where p is a con-
stant (e.g. p = 0.5). As h and r moves towards each
other
ˆ
h stays between them, while |~v| → 0, eventu-
ally ending in a collision at
ˆ
h. We use this strategy
with two modifications. We set p dynamically based
on the estimated velocity of h. This effectually makes
the robot react to a fast moving person quicker than
to a slow moving person. The other modification is
that when |
ˆ
h − r| < d, we freeze
ˆ
h until the robot has
passed h. This is done to make the robot commit to a
path without the avoidance behavior affecting where
the calculated collision point is. We set d = 2m. Fig-
ure 4c shows the robot planning around the collision
point, thereby avoiding the approaching human.
The last scenario is where a person moves or-
thogonally to the robots path, as seen in fig. 5. In
most cases no collision will occur in such scenario, as
the robot and the human would have to approach the
crossing of their paths at the same time. Therefore,
we constrain this scenario to such cases, by having
the person walk slow enough to force a collision. Fig-
ure 5d shows the cost by SNL in this scenario. Here
the robot plans a path in front of the person, as it is
the shortest path around the cost. The robot therefore
(a) (b)
(c) (d)
Figure 5: (a) Top down view of the experimental setup. (b)
Detection image (c) CASN and (d) SNL method for setting
cost around an orthogonally moving person.
does not avoid the collision, and it will have to brake
in order to do so. Ideally, the robot should drive be-
hind the person in order to ensure not colliding. Again
we do this by detecting collision points
ˆ
h. A simple
strategy would be to put
ˆ
h directly in front of the robot
at ~v
x
, i.e. the x component of vector between r and
h. If the person is not walking directly orthogonal to
the robots path, or when the robot moves, |~v
x
| is af-
fected. However, ultimately a collision happens at
ˆ
h
as |~v| → 0. As before, we modify this strategy in or-
der to make the robot behave adequately. To make
the robot react quicker, we put
ˆ
h at p~v
x
, with p = 0.8.
To force the robot behind the person, we shift
ˆ
h along
−~v
y
. And finally to make the robot commit to the
path we freeze
ˆ
h when |
ˆ
h − r| < d. Figure 5c shows
the resulting cost and path using this cost model in the
orthogonal collision scenario.
4 EXPERIMENTS
To asses CASN we set up a controlled experiment in-
volving a mobile robot and three test subjects. We
quantify the methods by looking at how close the
robot comes to the test subjects and how many times
the robot enter the personal and intimate space of
the test subjects. We make four individual tests, one
for each of the scenarios presented in section 3.3: 1.
Static person; 2. Static group; 3. Direct collision; 4.
orthogonal Collision.
The robot used in the experiment has an Intel Re-
alSense D455 camera mounted in the front. In order
to get ground truth trajectories of the test subjects and
the robot, we set up a camera in a top-down view in
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
430
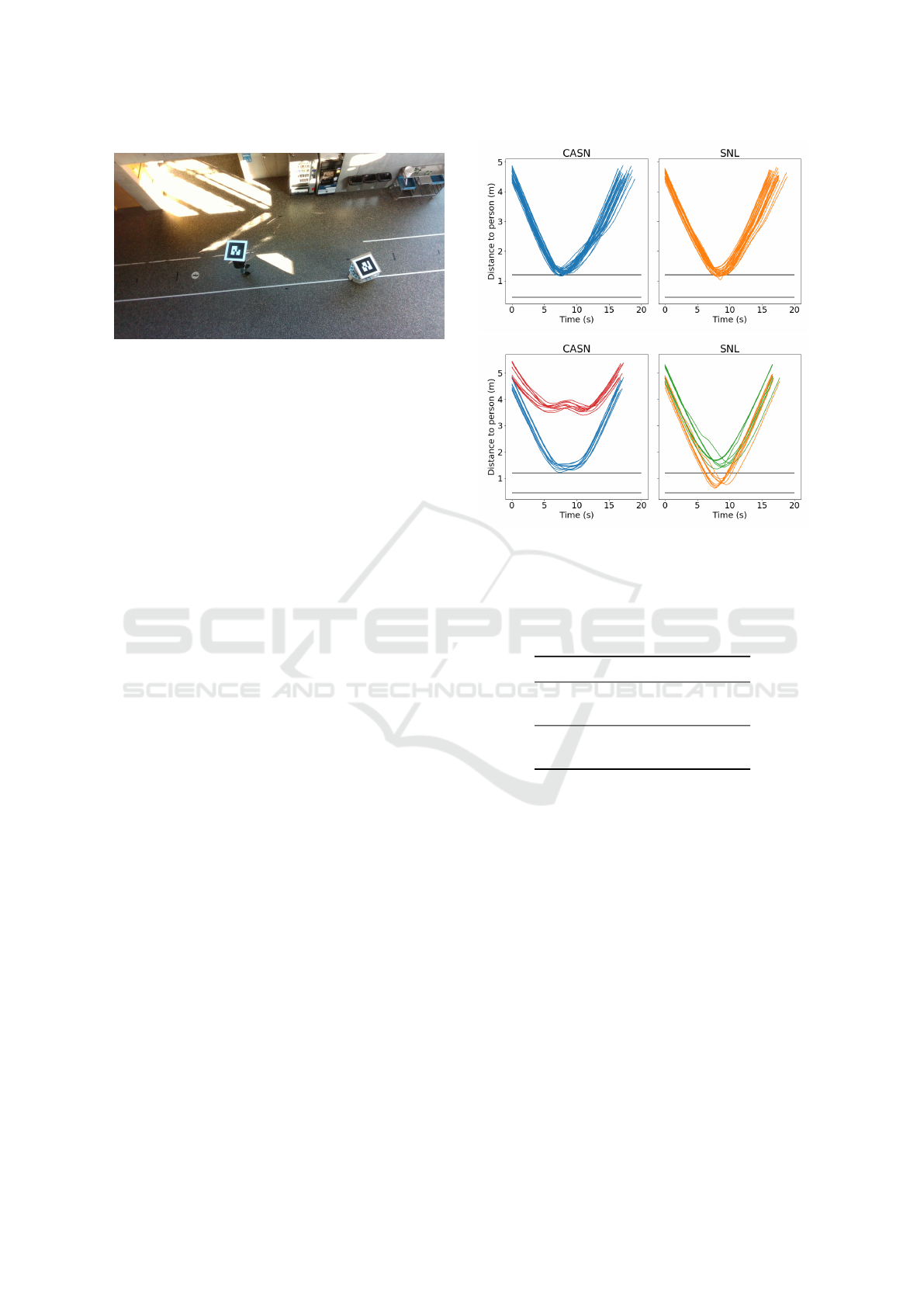
Figure 6: Experimental setup viewed from the top-down
view camera: Marker on the robot and a marker on each
test subject to get ground truth distances between the test
subjects and the robot.
a hallway where the robot is maneuvering. The test is
limited to the field of view of the top-down view cam-
era. Ground truth of the trajectories are collected by
mounting markers on the test subjects, and the robot
and a stationary marker is placed on the ground as a
reference point for calibration of the top-down view
camera placement in the map frame. The experimen-
tal setup is shown on fig. 6, from the point of view of
the marker detection camera.
In each scenario the robot was continuously mov-
ing between two static coordinates in the map (from
left to right). In scenario 1 and 2, each test subject was
instructed to stand on predefined static positions in the
map that was in a direct collision course of the robots
movement. In scenario 3 and 4 the test subjects were
moving between two predefined points that was in di-
rect collision course with the robots predefined path.
We instructed the test subjects to walk at the speed
they found natural. The experiment was blinded and
randomized so the test subjects did not know which
of the two methods they were exposed to.
In the following tables and graphs the number of
samples are noted as (n), the distance as d (meters),
and velocity as v (m/s) and intrusions (how many
times the robot enters the social spaces) and time for
the trial (seconds).
4.1 Static Person
In this experiment we have the test subject standing
statically in the robots predefined path. On fig. 7a the
graph shows the distance from the robot to the per-
son throughout each trial. The constant line at 1.2 m
marks the intrusion of the personal space and the line
at 0.45 m marks the intrusion of the intimate space.
The graph show that both CASN and SNL navigates
nicely around a static person but SNL has more in-
trusions of the static persons personal space. On the
top part of table 1 (Single) we see the details of the
(a)
(b)
Figure 7: Distance from the robot to the test subject(s) in
(a) static person and (b) static group. Each line correspond
to one trial and each color corresponds to one person.
Table 1: Static person and static group: n is the number of
samples, d is the distance and i is the number of times the
robot intrudes the personal spaces.
n d (m) i
Single (CASN) 30 1.29 4
Single (SNL) 30 1.25 14
Group (CASN) 10 1.39 0
Group (SNL) 10 0.76 10
experiment. We find the closest the robot gets to the
person in each trial, and find the mean of this value
for each method. This is denoted d. Using CASN the
robot keeps a mean minimum distance of 1.29 m to the
person and only intrude the personal space 4 times.
Using the SNL method the robot keeps an mean min-
imum distance of 1.25 m to the person which is still
larger than the personal space distance but the robot
intrudes the personal space 14 times. The CASN
method for setting cost on an individual static person
(fig. 2) versus SNL seems to make the robot navigate
more socially acceptable around the person.
4.2 Static Group
In this experiment we have the two test subjects stand-
ing statically as a group in the robots predefined path.
On fig. 7b the graph shows the distance from the robot
to the test subjects where the colors represents each of
Context-aware Social Robot Navigation
431
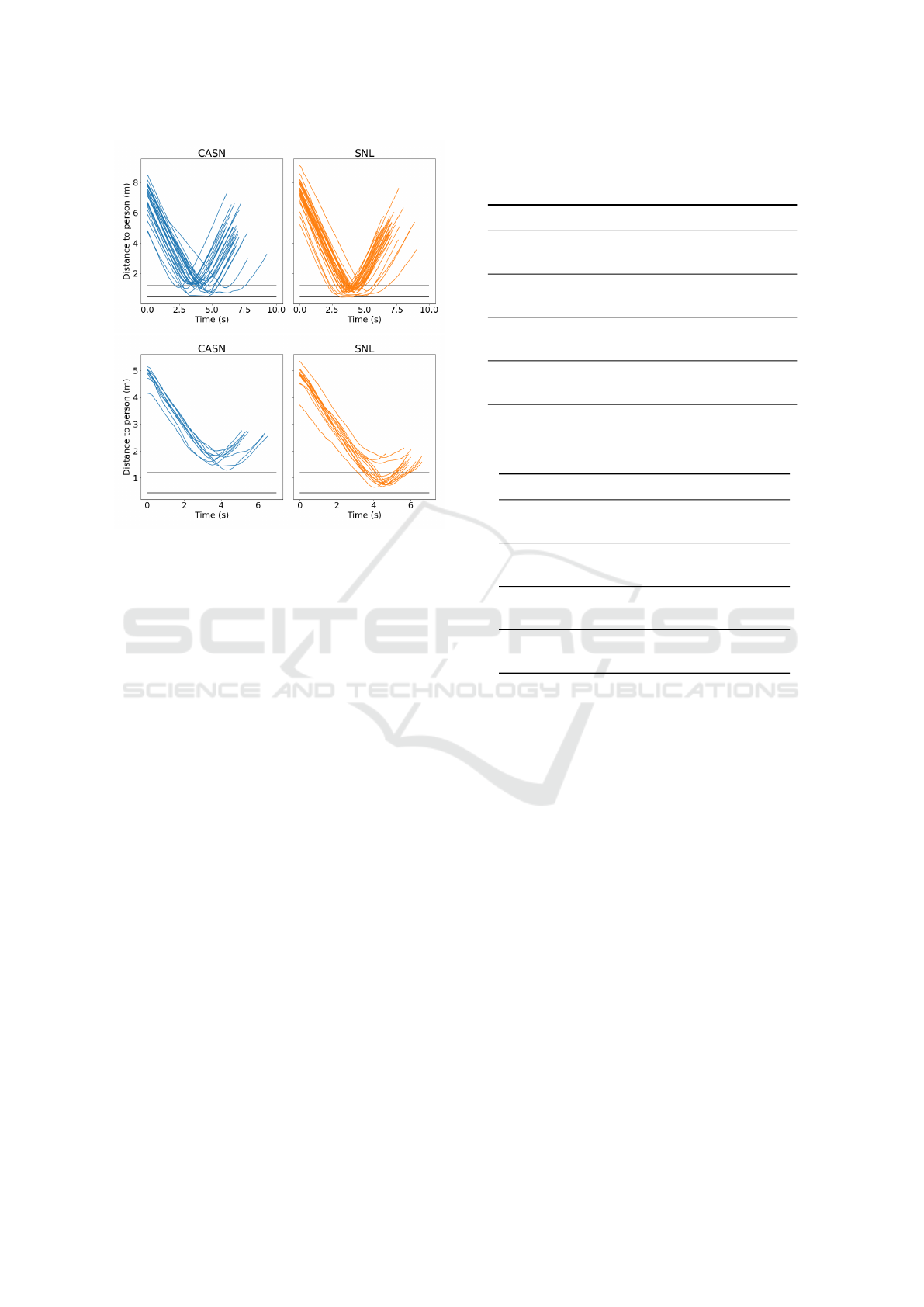
(a)
(b)
Figure 8: Distance from the robot to the test subject in (a)
direct collision and (b) orthogonal collision. Each line cor-
respond to one trial. The horizontal lines are the personal
and intimate space radii.
the two test subjects, and the horizontal lines at 1.2 m
and 0.45 m marks the intrusion of the personal and
intimate spaces respectively. CASN keeps an accept-
able distance to both of test subjects since it avoids the
group as shown earlier on fig. 3. The graph shows that
the robot often intrudes the personal space of one of
the test subjects using SNL. This is because it drives
through the group while trying to minimize the dis-
tance between each subject, since it does not use in-
formation about social interactions between two peo-
ple. On the bottom part of table 1 (Group) we see
the details of the experiment. Using CASN the robot
keeps a mean minimum distance of 1.39m to the peo-
ple and never intrudes the personal space of the par-
ticipants. Using the SNL method the robot keeps a
mean minimum distance of 0.76 m to the people and
intrudes the personal space every trial. The CASN
method for setting cost on a static group (fig. 3) ver-
sus SNL makes the robot navigate more socially ac-
ceptable around a group.
4.3 Direct Collision
In this experiment we have the test subject and the
robot in a direct collision path. On fig. 8a the
graph shows the distance from the robot to the per-
son throughout the run, the constant line at 1.2 m
marks the intrusion of the personal space and the line
Table 2: Direct collision: n is the number of samples, v is
the velocity, d is the distance and i is the number of times
the robot intrudes the personal spaces.
n v (m/s) d (m) i
Slow (CASN) 9 0.47 0.99 5
Slow (SNL) 11 0.42 0.82 11(1)
Medium (CASN) 10 0.69 1.18 6
Medium (SNL) 11 0.66 0.85 11
Fast (CASN) 10 1.35 1.13 5
Fast (SNL) 11 1.33 0.86 11
All (CASN) 29 0.85 1.11 16
All (SNL) 33 0.80 0.84 33(1)
Table 3: Orthogonal collision: n is the number of samples,
v is the velocity, d is the distance and i is the number of
times the robot intrudes the personal spaces.
n v (m/s) d (m) i
Slow (CASN) 5 0.38 1.71 0
Slow (SNL) 5 0.51 1.02 4
Medium (CASN) 5 0.61 1.69 0
Medium (SNL) 5 0.67 0.73 5
Fast (CASN) 5 1.00 1.72 0
Fast (SNL) 5 0.91 1.21 3
All (CASN) 15 0.66 1.70 0
All (SNL) 15 0.69 0.99 12
at 0.45 m marks the intrusion of the intimate space.
The graph show that both CASN and SNL intrudes
the personal space and that the SNL method intrudes
the intimate space. On table 2 we see the details of
the experiment. We clustered the participants speed
into three categories (slow, medium and fast) to see if
speed makes a difference in performance of the two
methods and we also report all trials collected. Using
CASN the robot keeps a mean minimum distance to
the person of 1.11 m and intrudes the personal space
16 times. Using the SNL method the robot keeps a
mean minimum distance to the person of 0.84 m and
intrudes the personal space 33 times and the intimate
space 1 time (which was a collision). We also see
that CASN keeps a more socially acceptable distance
over the three speeds than SNL, where we range from
mean minimum distances between 0.99 − 1.18 and
SNL ranges between 0.82 − 0.86, which means that
the robot always drive into the participants personal
space using SNL.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
432

4.4 Orthogonal Collision
In this experiment the test subject and the robot is
on an orthogonal collision path. On fig. 8b the
graph shows the distance from the robot to the per-
son throughout the run. The horizontal lines at 1.2 m
and 0.45 m marks the intrusion of the personal and
intimate spaces respectively. The graph shows that
CASN never intrudes the personal space of the partic-
ipants and while the SNL method does.
With CASN (fig. 5) we force the robot to drive
behind the person, in the direction where the person
came from. In this way the robot and the persons
path will never collide. The SNL method will cre-
ate an inadequate robot movement during an orthog-
onal collision, where the robot often follows the path
of the person. On table 3 we see the results from the
experiment. We again cluster the participants speed
into three categories (slow, medium and fast) to see if
speed makes a difference in performance of the two
methods, and we also report all trials collected. Us-
ing CASN the robot keeps a mean minimum distance
of 1.70 m to the person and never intrudes the per-
sonal space. Using the SNL method the robot keeps a
mean minimum distance of 0.99 m to the person and
intrudes the personal space 12 times. We also see that
CASN keeps similar socially acceptable distance over
the three speeds. The CASN method’s mean min-
imum distances ranges between 1.69-1.72 while the
SNL method ranges between 0.73-1.21. This means
that the robot often drives into the participants per-
sonal space using SNL.
5 CONCLUSION
In this paper we present the method Context-Aware
Social robot Navigation (CASN) for putting mobility
constraints for robots navigating in the proximity of
humans, in the form of costs in costmaps. Inspired
by social space theory by (Hall, 1966) and conversa-
tional group theory by (Kendon, 1990) we put costs
around detected humans in the scene of the robot. We
extend this basic principle to also use the context of
the situation e.g, are the humans in motion, are there
any social interactions between detected humans, and
the task of the robot, in this paper avoiding humans in
its way. Our experiments show that CASN method
makes a mobile robot follow social convention, in
four different navigation scenarios, better than a ROS
open source method social navigation layer
ACKNOWLEDGEMENTS
This research was supported by the project Health-
CAT, funded by the European Fund for regional de-
velopment, and by the project SMOOTH (project
number 6158-00009B) by Innovation Fund Denmark.
REFERENCES
Bordallo, A., Previtali, F., Nardelli, N., and Ramamoorthy,
S. (2015). Counterfactual reasoning about intent for
interactive navigation in dynamic environments. In
2015 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 2943–2950.
IEEE.
Hall, E. T. (1966). The hidden dimension.
IFR (2020). International Foundation of Robotics presents
World Robotics Report 2020.
Juel, W. K., Haarslev, F., Kr
¨
uger, N., and Bodenhagen, L.
(2020). An integrated object detection and tracking
framework for mobile robots. pages 513–520.
Kendon, A. (1990). Conducting interaction: Patterns of
behavior in focused encounters, volume 7. CUP
Archive.
Khambhaita, H. and Alami, R. (2020). Viewing robot navi-
gation in human environment as a cooperative activity.
In Robotics Research, pages 285–300. Springer.
Kirby, R., Simmons, R., and Forlizzi, J. (2009). Com-
panion: A constraint-optimizing method for person-
acceptable navigation. In RO-MAN 2009-The 18th
IEEE International Symposium on Robot and Human
Interactive Communication, pages 607–612. IEEE.
Lu, D. V., Hershberger, D., and Smart, W. D. (2014). Lay-
ered costmaps for context-sensitive navigation. In
2014 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, page 709–715. IEEE.
Marder-Eppstein, E., Berger, E., Foote, T., Gerkey, B., and
Konolige, K. (2010). The office marathon: Robust
navigation in an indoor office environment. In 2010
IEEE International Conference on Robotics and Au-
tomation, pages 300–307.
Mateus, A., Ribeiro, D., Miraldo, P., and Nascimento, J. C.
(2019). Efficient and robust pedestrian detection using
deep learning for human-aware navigation. Robotics
and Autonomous Systems, 113:23–37.
Mead, R. and Matari
´
c, M. J. (2017). Autonomous
human–robot proxemics: socially aware navigation
based on interaction potential. Autonomous Robots,
41(5):1189–1201.
Ram
´
ırez, O. A. I., Khambhaita, H., Chatila, R., Chetouani,
M., and Alami, R. (2016). Robots learning how and
where to approach people. In 2016 25th IEEE inter-
national symposium on robot and human interactive
communication (RO-MAN), pages 347–353. IEEE.
Riek, L. D. (2017). Healthcare robotics. Communications
of the ACM, 60(11):68–78.
Scandolo, L. and Fraichard, T. (2011). An anthropomorphic
navigation scheme for dynamic scenarios. In 2011
IEEE International Conference on Robotics and Au-
tomation, pages 809–814. IEEE.
Context-aware Social Robot Navigation
433
