
Parallel and Distributed Agent-based Simulation of Large-scale
Socio-technical Systems with Loosely Coupled Virtual Machines
Stefan Bosse
a
University of Bremen, Dept. of Math. & Computer Science, 28359 Bremen, Germany
Keywords: Agent-based Computing, Agent-based Simulation, Distributed Simulation, Simulation of Large-scale
Systems.
Abstract: Agent-based systems are inherently distributed and parallel by a distributed memory model, but agent-based
simulation is often characterised by a shared memory model. This paper discusses the challenges of and
solution for large-scale distributed agent-based simulation using virtual machines. Simulation of large-scale
multi-agent systems with more than 10000 agents on a single processor node requires high computational
times that can be far beyond the constraints set by the users, e.g., in real-time capable simulations. Parallel
and distributed simulation involves the transformation of shared to a communication-based distributed
memory model that can create a significant communication overhead. In this work, instead distributing an
originally monolithic simulator with visualisation, a loosely coupled distributed agent process platform
cluster network performing the agent processing for simulation is monitored by a visualisation and
simulation control service. A typical use case of traffic simulation in smart city context is used for
evaluation the performance of the proposed DSEJAMON architecture.
a
https://orcid.org/0000-0002-8774-6141
1 INTRODUCTION AND
OVERVIEW
Agent models typically model behaviour and
interaction that are used intensively in Agent-based
simulation (ABS) and modelling (ABM) of complex
systems providing a simplified mapping of real-
world entity behaviour on a simplified simulation
world. Parallel and distributed agent-based
simulation (PDABS) aims at reducing the execution
time through executing concurrently the agent
models distributed on different processors, which is
a first-level approach to improve the execution speed
and is simplified by the agent memory model.
Recent progress of distributed ABS is shown in
(Mastio, 2018) addressing geospatial systems
(traffic). They achieved a speed-up about 10 by
using macroscopic interaction models. Agent
scheduling and distribution on processors are the
main issues to be addressed among communication
complexity arising in distributed systems. Load
balancing is an important key methodology, too
(Cordasco, 2017). Agent communication can
dominate inner agent computation.
There is an ongoing and increasing interest in the
parallelisation of simulations, especially, but not
limited to, for large-scale ABS (Aaby, 2010).
Although, there is recent progress in utilisation of
GPGPU systems for the exploitation of data path
parallelism, exploitation of control path parallelism
is not addressed and therefore considered in this
work. The cellular automata computing model with
neighbourhood communication is close to the agent
model and can be processed partially and efficiently
on GPU systems (Richmond, 2009). Hardware
accelerators can be used to speed up special
computations for simulation (Xiao, 2018). But in
general, agents pose dynamic, irregular, short- and
long-range communication that cannot be mapped
efficiently on GPU-based processing systems.
Distribution of simulations can base on two main
principles: Distribution of the environment and
distribution of agents (Rihawi, 2014). In this work,
both principles are addressed.
The processing of simulations using Virtual
Machines (VM) with hardware and operating system
344
Bosse, S.
Parallel and Distributed Agent-based Simulation of Large-scale Socio-technical Systems with Loosely Coupled Virtual Machines.
DOI: 10.5220/0010553003440351
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 344-351
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

abstractions shows significant benefits in flexibility
and adaptivity required in most simulation scenarios.
Therefore, in this work there is a focus of
simulations performed on VMs and their
parallelisation. Considering large-scale ABS, the
large-scale distributed Web with millions of servers
and billions of user is an attractive distributed
machine for simulation.
The agent model itself poses inherent parallelism
due its low degree of coupling to the processing
platform and between agents. Interaction between
agents commonly takes place with well-defined
message-based communication. e.g., by using
synchronised tuple spaces. Therefore, the agent
model is an inherent parallel and distributed
processing model relying on a distributed memory
model (DMM) natively. But in simulation worlds a
shared memory model (SMM) is often used for
efficient and simplified agent interaction and
communication. Typical examples for SM-based
Multi-agent systems (MAS) are NetLogo (Tisue,
2004) or SESAM (Klügl, 2006). Commonly, agent
models used in simulation cannot be deployed in
real computing environments. In addition to ABS
there is Agent-based Computation (ABC),
commonly involving totally different agent
processing platforms (APP) and agent models.
The starting point of this work is an already
existing unified agent model that can be used for
ABS and ABC in real-word data processing
environments, too (Bosse, 2019). Simulation of
MAS is performed by using the same platform for
ABS and ABC, the JavaScript Agent Machine
(JAM) (Bosse, 2020), which can be processed by
any generic JavaScript (JS) VM like nodejs or by a
Web browser (e.g., spidermonkey). Application of
parallelisation to VM is difficult and is limited to
some special cases. Most significant barrier for
parallelisation in VMs is the automatic memory
management (AMM) and garbage collection (GC)
prohibiting SMM. Parallelisation is here considered
as a synonym for distribution of computation and is
no further distinguished in this work.
The JAM platform supports already distributed
loosely coupled platform networks, i.e., a set of
nodes ℕ={N
1
,N
2
,..,N
n
} is connected by an arbitrary
communication graph G=〈ℕ,ℂ〉 that connects nodes
by point-to-point communication channels ℂ={c
i,j
}.
But there is no DMM, agents on different nodes are
independent. JAM agents are capable to migrate
between nodes (by code and data snapshot check-
pointing and migration). This feature implements
some kind of a distributed memory virtually, but
without any central managing instance or group
communication. Basically, an agent carries some
isolated region of the distributed memory and
memory access is only possible by agent
communication (using TS/signals). JAM networks
are inherently distributed by strict data and control
decoupling, and there are no shared resources among
the set of nodes. Up to here we have a well scaling
distributed network. Indeed there is no upper bound
limit of connected nodes.
The already existing Simulation Environment for
JAM (SEJAM) (Bosse, 2019) extends one physical
JAM node with a visualisation layer and simulation
control and enables simulation of real-world JAM
agents situated in an artificial two-dimensional geo-
spatial simulation world. Additionally, the JAM
node of SEJAM can be connected to any other
external JAM node providing real-world-in-the-loop
simulation (i.e., agents from a real-world vehicle
platform connected via the Internet can migrate into
the simulation world and vice versa!). Virtualisation
of JAM nodes enables simulation of JAM networks
by SEJAM. In contrast to pure computational JAM
networks the simulator couples its JAM nodes by
shared memory (SM) tightly and is connected to all
parts of the JAM node including direct agent access.
Transforming this SM to a distributed memory (DM)
architecture would cause significant Interprocess-
Communication (IPC) costs by messaging limiting
the speed-up.
In this work three main strategies are applied and
evaluated to provide an almost linear scaling of the
speed-up for large-scale distributed simulations:
1. Strict decoupling of visualisation and
simulation control from computation (of
agents and platforms);
2. Adding a Distributed Object Memory layer
(DOM) to the existing JAM platform to
enable distributed but coupled JAM node
networks with distributed shared objects
and virtualisation;
3. Mapping of simulation entities (virtual
platforms and agents) on multiple coupled
physical platforms by preserving spatial
and communication context (environmental
and agent distribution based on principle
discussed in (Rihawi, 2014));
In (Šišlák, 2009) a basically similar approach
was applied to large-scale agent systems using signal
and message communication for node coupling, but
limited to local agent interaction. The approach
presented in this work poses no communication
range limitations. To understand the challenges and
pitfalls of different approaches a short introduction
Parallel and Distributed Agent-based Simulation of Large-scale Socio-technical Systems with Loosely Coupled Virtual Machines
345

of the underlying agent model, its original JAM, and
the simulator SEJAM is required, discussed in the
next sections.
The novelty of this work is a the deployment of
an unified agent platform for distributed
computation and simulation supporting large-scale
ABC/ABM/ABS based on an optimised
virtualisation layer using distributed shared object
memory. A simulation monitor providing
visualisation and control is attached to the
distributed JAM network. Different mapping
methods are introduced and compared. Agents can
migrate seamless between virtual and real world.
2 PARALLEL AND DISTRIBUTED
SIMULATION
2.1 Parallel and Distributed Agent
Processing Architecture
The core of the JAM agent processing platform is
the Agent Input-Output System (AIOS). The AIOS
provides a set of modules and operations that can be
accessed by the agents. First part of virtualisation of
the JavaScript code execution is a sandbox
environment and the agent scheduler. Second part
are virtual JAM nodes (vJAM). Each vJAM is a
virtual isolation container with its own tuple space
and agent process table. An agent can only interact
with other agents via the AIOS by:
1. Anonymously storing and extracting data
via a synchronised tuple space data base
(generative communication);
2. Addressed sending of signal messages to
other agents (mainly used by parent-
children groups);
3. Agent control supporting creation and
termination of agents including replication.
In this section three different JAM platforms modes
are considered:
1. pJAM. A physical JAM node executed by
a generic JS VM;
2. vJAM. A virtual JAM node providing
virtualisation of a pJAM and attached to
and executed by a pJAM node;
3. dJAM. A distributed JAM node part of a
JAM cluster network providing coupling by
Distributed Object Spaces (including a
distributed simulation world).
The original JavaScript Agent Machine (JAM) is
a portable processing platform for reactive state-
based JavaScript agents (Bosse, 2019). JAM is
programmed entirely in JavaScript as well as the
agents. This enables the deployment of the platform
on arbitrary computing devices including WEB
browsers and the integration in any existing software
just requiring an embedded JavaScript interpreter. JS
execution is strictly single-threaded with only one
control flow preventing any parallelisation on JS
level except asynchronous IO operations that can be
scheduled in parallel. One major feature of JAM
agents is their mobility. An agent can migrate at any
time its snapshot to any other JAM node preserving
the code, the data, and control state. The distributed
dJAM node is sub-classified in tightly coupled
pJAM nodes (dpJAM) sharing most of their data
structures, and in coupled vJAM nodes (dvJAM)
sharing only a sub-set of platform data structures.
Each pJAM node has a scheduler with a scheduling
loop iteration over the set of associated vJAM nodes.
All agents of a vJAM node are proecssed
sequentielly by executing the next activity of an
agent. Any remote operations (always asynchronous
operations) are queued and proecssed after the first
run of the scheudling loop finished (two-phase
processing).
2.2 Distributed Shared Objects
Virtual nodes can be clustered to a distributed virtual
node by sharing:
1. Tuple Space (copy-on-demand by RPC
with event notifications);
2. Process Table (replicated on all distributed
nodes, strict consistency required);
3. Auxiliary objects by higher software layers
managed by a single central instance, e.g.,
the graphics layer of simulator (P2P RPC)
4. Agent data (Direct Agent Access, copy-on-
demand by RPC, no consistency required).
Shared objects are managed by a virtual node
object manager (OM) by using point-to-point
communication and FIFO message queues. Access
of shared objects involves multi-cast group
communication emulated by single point-to-point
messages. To satisfy consistency of data objects,
group communication (implemented by multiple
point-to-point messages) must be totally ordered.
For this reason, one node of the group must act as a
sequencer.
Shared objects are modified by:
1. A one-phase update protocol;
2. A two-phase primary-copy update protocol;
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
346
3. An invalidation protocol; or
4. By a P2P RPC protocol.
Using point-to-point messaging provided by
DAMP and managed by the sequencer to broadcast
the messages to all group members. Tuple space
output store operation are not replicated to all group
member tuple spaces (copy-on-demand). Centralised
stored and handled objects like the modification of
the graphical simulation world is performed directly
by RPC messages. Tuple space communication
provides no guarantee for completion and reliability.
For example, agents can concurrently try to remove
a tuple, but only one agent will succeed.
Some shared objects are updated lazily and
directly by the group members without using the
broadcast sequencer, i.e., data consistency is not
guaranteed, but not being relevant in this case. To
support distributed object memory and group
communication, the AMP is extended by a
Distributed AMP (DAMP) using either P2P RPC or
multi-cast messages with a sequencer with the
following (low-level) messages supporting
distributed shared objects (DSO), based on a ordered
multi-cast message implementation using point-to-
point messages (Kaashoek, 1989): JOIN, B-
REQUEST, BROADCAST, RETRANS,
PHASE1, PHASE2, ACK, supporting one- and
two-phase object update and invalidation including
lazy updates. Finally, DAMP supports (high-level)
access to a distributed region-segmented simulation
world (via the DSOM, mainly shapes, resources,
platforms): ADD, ASK, REM, SEARCH,
MIGRATE. DAMP is commonly handled on separate
communication ports spawning a JAM platform
network.
2.3 Distributed Shared Object
Manager (DSOM)
The object manager (OM) is responsible for the
underlying object sharing management and
messaging. But the original JAM architecture and
API would require a significant redesign of the
entire JAM architecture to support DMM via the
OM. Since DMM is only required for simulation and
JAM should be deployed in simulation and computer
networks without modification, a distribution shared
object manager (DSOM) connects to the JAM code
on demand (i.e., if JAM is part of a simulator or
simulation network). The DSOM extends and
exchanges parts of the JAM code to connect to the
JAM supporting DMM and vJAM migration. To
reduce communication, a log-based approach with
P2P RPC communication is used to update a global
object map. The log contains changes of distributed
objects. Agents typically access spatially bounded
data only.
2.4 Simulation Environment for JAM
The core of the distributed simulation environment
is the already existing Simulation Environment for
JAM (SEJAM, Bosse, 2020), which consists
basically of a physical JAM node (pJAM) with a
visualisation and simulation control layer. In
SEJAM; each JAM agent is associated with a visual
shape visible in a two-dimensional simulation world,
shown in Fig. 2 (left). The simulator extends the
AIOS of JAM with additional APIs, beside
visualisation, most important, a NetLogo-like shared
memory model enabling spatial and pattern search
and modification (i.e., direct agent access), and
access of data storage (e.g., SQL data bases).
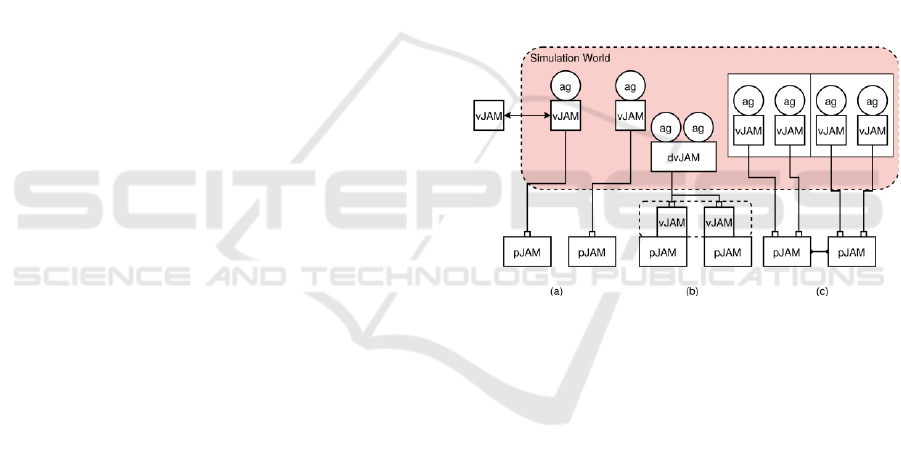
Figure 1: Distribution strategies: (a) Each virtual JAM
node is assigned to a different physical node (b) A
distributed virtual JAM node (dvJAM) is created by
distributing agent processing on different physical nodes
(c) in Regions of agents with their vJAM nodes are
distributed on different pJAM nodes by preserving local
context.
SEJAM supports physical and computational
agents (introduced in Sec. [Agent-based Modelling,
Computation, and Simulation]). A physical agent is
always bound to its own vJAM and cannot migrate to
another vJAM. Computational agents (processed in
simulation and computer networks) can migrate
between different vJAM nodes on different pJAM
nodes. Note that SEJAM processes the JAM node and
the simulation layer by one JS VM in one computa-
tional process. There are basically three distribution
strategies that could be applied (see Fig. 1):
1. Each simulation vJAM is moved to a
remote pJAM node;
2. One simulation vJAM node is distributed
across multiple remote pJAM nodes;
Parallel and Distributed Agent-based Simulation of Large-scale Socio-technical Systems with Loosely Coupled Virtual Machines
347
3. Spatial regions of simulation vJAM nodes
are mapped on single pJAM nodes.
Beside the computational parallelisation of the
agent processing, the agent-simulator interface (e.g.,
operations that modify the agent shape visualisation
and simulation worlds) and extended APIs provided
by the simulator have to be considered in the parallel
and distributed simulator architecture. The extended
NetLogo-like API for physical agents maps a shared
memory model on the multi-agent system, i.e.,
agents can access other agent data and control state
directly (Direct Agent Access, DAA). All DAA
operations must be forwarded to remote JAM nodes
by using DAMP primitives and the OM, too. The
distribution of DAA (i.e., basically the powerful
NetLogo ask operation) is a challenge and non-
trivial, and can result in high computational costs.
Grouping of vJAM nodes with a spatial context
(region of the simulation world) on the same pJAM
node can reduce communication significantly.
2.5 Distributed Simulation and
Monitoring
In this work, parallelisation is always implemented
by message-based communicating processes, i.e.,
parallelisation is an equivalent of distribution. The
unified distribution approach does not distinguish
between (computer) local and remote network
operations. To reduce communication complexity
and costs a new approach is proposed using a
distributed JAM network cluster for simulation
without a tightly coupled simulator, shown in Fig. 2.
The simulation and visualisation layer is only
loosely coupled and acts as a monitor and a
controller. Since physical agents situated in a
graphical simulation world can change the
simulation world, a backing-store architecture with a
change log is proposed. Each pJAM node represents
a region of the simulation world with a backing-
store layer that maps the visual world with visual
shapes representing agents, virtual platforms, and
resources (with data). Additionally, agents can get
information from the backing-store, i.e., resources
and their constraints, e.g., streets of a city map. The
simulator will periodically collect changes to update
the real visual representation of the world and vice
versa via P2P RPC messages. Each region can
access any other region, too.
Each pJAM is extended by typical simulation
APIs, most of all the NetLogo API. Depending on
the NetLogo operation and the involved set of
entities (agents, resources), the operation can be
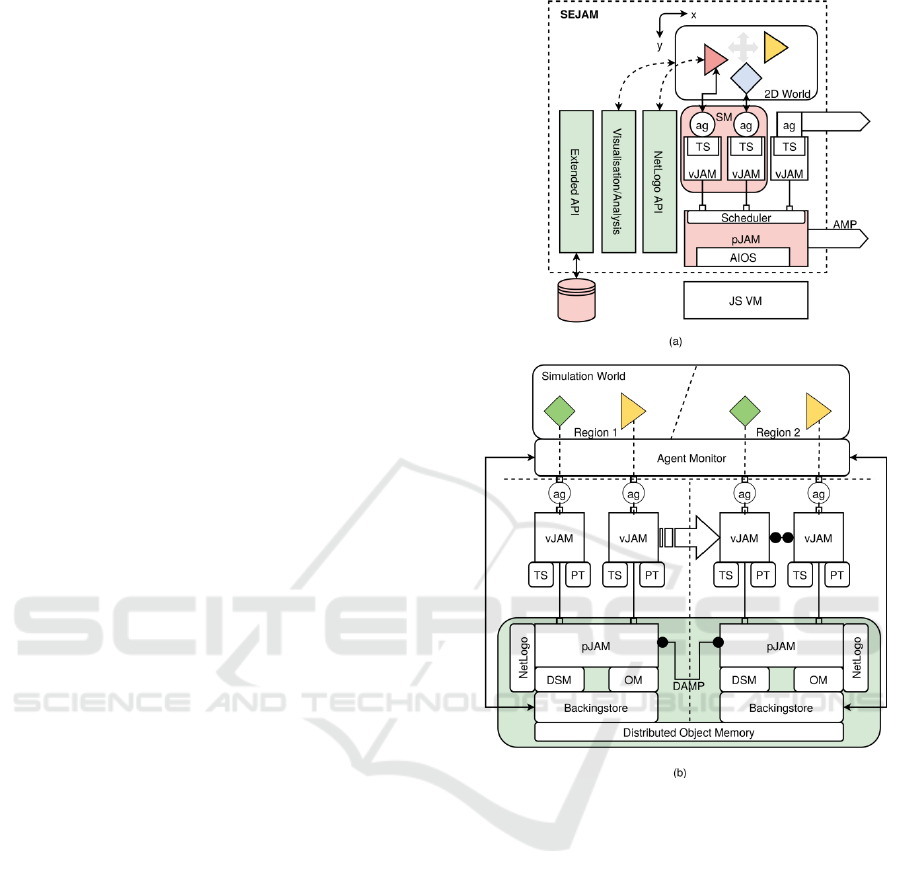
Figure 2: (a) Original monolithic SEJAM simulator with
one pJAM and multiple vJAM nodes (b) Distributed
simulation network consisting of coupled and extended
pJAM networks. The simulator monitors the agents and its
visual backing-store.
performed by local computation and data, or by
additional communication with remote pJAM nodes
via DAMP. The location and current pJAM node
association of physical agents is represented by a
distributed object table (with a local copy on each
pJAM node with a one-phase update protocol).
Physical agents can migrate from one region to
another requiring the migration of the entire
associated vJAM, but a vJAM is just an
administrative data structure including the tuple
spaces (significant payload). All simulator-
pJAM/vJAM and vJAM-vJAM IPC is performed
using the DAMP. The vJAM nodes can be linked
(ad-hoc and dynamically) via AMP, too. If the nodes
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
348

are on the same pJAM node this link can be virtual
(direct object and message passing), If the vJAM
nodes are located on different pJAM nodes the
virtual link must be replaced by a communication
channel via DAMP.
There is still one central pJAM node part of the
DSEJAMON architecture providing a multi-cast
sequencer and a central simulation clock controlling
single-stepping of all nodes synchronously. The
synchronous stepping of all regions is important to
reduce multi-cast messaging and synchronisation
between regions. A simulation step is atomic. A
logical world agent is used to control the simulation,
accessing data bases, computing and distributing
sensors, monitoring agents, and finally providing
sensor input to the physical agents via tuple spaces.
This requires remote tuple space operation requests
implemented by DAMP via P2P messages. The
simulation world is distributed in regions with a
local backing store and log-based modification
tracking avoiding expensive synchronised
distributed shared memory. Nodes are connected via
UDP (remote and local IPC) or UNIX socket (local
IPC only) channels.
3 EVALUATION AND USE-CASE
TRAFFIC SIMULATION
The last section considered only the number of
messages to implement various distribution
approaches. Network latency, data bandwidth, and
message volume have a significant effect on the real
speed-up that can be achieved. The largest
contributions to communication costs are vJAM
migration and remote simulation world access. To
evaluate the new distributed simulation
environment, a typical use-case with a large number
of computational intensive agents is investigated.
The main question is the scaling and overall
performance (speed-up) of the distributed parallel
simulation compared with the classical sequential
single-instance simulation.
There are some major parameters to be
considered:
1. The distribution of sensor data and
monitoring of the simulation world via the
backing store and change log;
2. The communication time of agents with the
distributed simulation world (remote set
operations) and vJAM migration;
3. The communication time for shared
objects;
4. Scaling efficiency of the underlying
communication and computer architecture
(e.g., w.r.t. memory architecture);
5. The impact of distribution on memory
management (garbage collection) of the JS
VM (reducing memory pressure).
Figure 3: Example segmentation of the traffic simulation
world (art. city with streets, signals, and vehicle agents)
that is partitioned into four regions, each associated to a
vJAM node (DOM: Distributed Shared Object Manager).
Traffic simulation typically involves a large
number of agents representing vehicles, drivers, and
passengers. To get reasonable results, MAS with
more than 10000 agents have to be simulated. An
agent represents a vehicle/driver group with its own
vJAM. Even with simplified agent behaviour models
the processing on one processor is a challenge. An
already performed traffic simulation from [9] was
used and compared with the parallelised simulator.
In this simulation independent driver agents should
learn long-range navigation by computationally
intensive reinforcement learning. A typical
simulation run with the original one-process/pJAM
SEJAM requires 10 minutes / 10000 simulation
steps. The distributed simulation maps regions of the
artificial city with thousands of vJAM nodes on
Parallel and Distributed Agent-based Simulation of Large-scale Socio-technical Systems with Loosely Coupled Virtual Machines
349
remote pJAM nodes, each associated with a region
of the simulation world, shown in Fig. 3. The pJAM
nodes are operating in single-step mode controlled
by a clock of the central simulation node. Each
region can access other regions pJAM nodes directly
via P2P RPC communication via DAMP. Physical
agents can access all regions of the world via DAMP
requests. Each region contains shapes representing
agents and resources spatially organised by an r-tree
for fast search. Some resources like streets are
distributed across multiple regions.
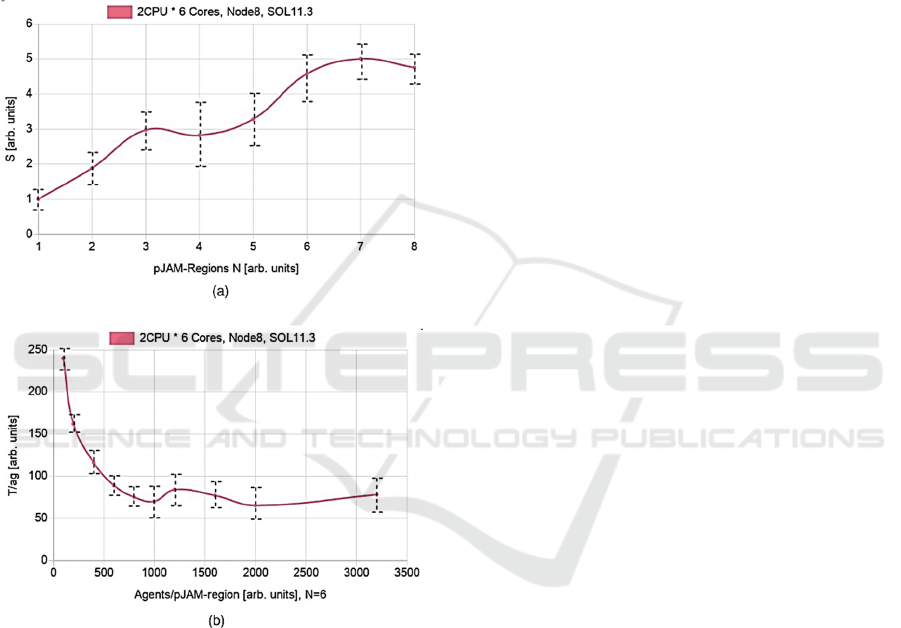
Figure 4: Results of the evaluation of the parallel traffic
simulation. (a) Measured speed-up with respect to number
of regions/pJAM nodes (b) Scaling of computation time
with respect to agents/region with 6 pJAM regions
(summarising all nodes and 10000 simulation steps).
Currently a speed-up up to 5 with a scaling of
about 70% can be achieved with a typical
communication overhead depending on computer
architecture and the network bandwidth and latency.
The parallel distributed simulation was evaluated on
a two CPU / 6 Core per CPU workstation. Fig. 4
shows some preliminary results with respect to the
measured speed-up of the traffic simulation for
10000 simulation steps of the traffic simulation (the
agent populations was about 1000 agents) and the
scaling of the speed-up with respect to the number of
agents per region (and pJAM node). A reasonable
speed-up can only be achieved if there is a
significant number of agents per region with a
significant amount of computational load.
Communication was composed of message transfers
between region-region and region-controller nodes.
4 CONCLUSION
Distribution and parallelisation of large-scale ABS is
still a challenge due to the increasing
communication complexity that can annihilate a
possible speed-up (below 1). A originally shared-
memory simulator could not be distributed
efficiently by separating visualisation and agent
computation. Another approach starting with an
isolated distributed JAM network mapping
simulation world agents and their vJAM nodes on
multiple pJAM nodes by preserving spatial
constraints (zones) could achieve a significant
speed-up by moderate communication costs.
Originally a computational multi-agent system can
be efficiently mapped on a distributed processing
network, but simulation overlaps a shared memory
model hard to be distributed efficiently afterwards.
The performance of the proposed distributed
simulation architecture still depends on the micro-
and macro-scale modelling. Long-range
communication and interaction of agents (including
agent search and DAA operations) can increase the
communication overhead significantly and lower the
speed-up depending on the communication
bandwidth. With increasing number of remote pJAM
nodes (each associated with a spatial region of the
simulation world) the scaling efficiency decrease
further, again due to increasing communication
between regions and more migrations of
agents/vJAM nodes. The scaling for large networks
has to be further investigated and WEB browsers as
pJAM nodes must be considered in future work.
REFERENCES
Aaby, B. G., Perumalla, K. S., Seal, S. K., Efficient
Simulation of Agent-Based Models on Multi-GPU and
Multi-Core Clusters, in SIMUTools 2010 March 15–
19, Torremolinos, Malaga, Spain, 2010
Bosse, S., Self-adaptive Traffic and Logistics Flow
Control using Learning Agents and Ubiquitous
Sensors, Proc. of the 5th International Conference on
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
350

System-Integrated Intelligence Conference, 11.11-
13.11.2020, Bremen, Germany, 2020
Bosse, S., Engel, U., Real-time Human-in-the-loop
Simulation with Mobile Agents, Chat Bots, and Crowd
Sensing for Smart Cities, Sensors (MDPI), 2019, doi:
10.3390/s19204356
Cordasco, G., Scarano, C. Spagnuolo and V., Work
Partitioning on Parallel and Distributed Agent-Based
Simulation, in 2017 IEEE International Parallel and
Distributed Processing Symposium: Workshops
(IPDPSW), Lake Buena Vista, FL, 2017 pp. 1472-
1481. doi: 10.1109/IPDPSW.2017.87
Kaashoek, M. F., Tanenbaum, A. S., Hummel, S. F., An
efficient reliable broadcast protocol, SIGOPS Oper.
Syst. Rev., 1989.
Klügl, F., Herrler, R., Fehler, M., SeSAm: implementation
of agent-based simulation using visual programming.
Proceedings of the fifth international joint conference
on Autonomous agents and multiagent systems. 2006
Mastio, M., et al. Distributed agent-based traffic
simulations, IEEE Intelligent Transportation Systems
Magazine 10.1, pp. 145-156, 2018
Richmond, P., Coakley, S., Romano, D. M., A High
Performance Agent Based Modelling Framework on
Graphics Card Hardware with CUDA, in Proc. of the
AAMAS 2009
Rihawi, O., Secq, Y., Mathieu, P., (2014). Effective
Distribution of Large Scale Situated Agent-based
Simulations.In Proceedings of the 6th International
Conference on Agents and Artificial Intelligence -
Volume 1: ICAART, 312-319, 2014, ESEO, Angers,
Loire Valley, France
Tisue, S., Wilensky, U., Netlogo: A simple environment
for modeling complexity. International conference on
complex systems. Vol. 21. 2004.
Xiao, J., Andelfinger, P., Eckhoff, D., Cai, W., Knoll, A.,
A Survey on Agent-based Simulation using Hardware
Accelerators, 2018.
Šišlák, D., Volf, P., M. Pěchouček (2009) Distributed
Platform for Large-Scale Agent-Based Simulations.
In: Dignum F., Bradshaw J., Silverman B., van
Doesburg W. (eds) Agents for Games and
Simulations. AGS 2009. Lecture Notes in Computer
Science, vol 5920. Springer.
Parallel and Distributed Agent-based Simulation of Large-scale Socio-technical Systems with Loosely Coupled Virtual Machines
351
