
Numerical Investigation of the Lateral Dynamic
Behaviour of the Anaconda
Python Kabeya Tshibamba
1
, Guyh Dituba Ngoma
2
and Fouad Erchiqui
2
1
University of Kinshasa, Department of Mechanical Engineering, Kinshasa, Democratic Republic of the Congo
2
University of Quebec in Abitibi-Témiscamingue, School of Engineering’s Department, 445, Boulevard de l’Université,
Rouyn-Noranda, Quebec, J9X 5E4, Canada
Keywords: Single Track Vehicle, Multibody System, Lateral Dynamic, Linear Stability, Eigenmodes, EasyDyn.
Abstract: This paper deals with the study of a particular single track vehicle, named Anaconda. Numerical simulations
are performed to assess the vehicle’s linear dynamic behavior. Indeed, multibody models of each component
of the Anaconda and the one of the entire vehicle are developed and linearized around stationary states. The
out-of-plane linearized sub-models are then used to have more insight in the lateral behaviour of the Anaconda
and the influence of one of its component, the pedal module, on this behaviour is outlined. These tasks are
carried out within the EasyDyn framework, an open source multibody library. Informative observations on
the simulation results help to find out some features of the Anaconda concerning its linear dynamic behaviour;
and some comment are made on the possibility of controlling its unstable eigenmodes.
1 INTRODUCTION
Anaconda is an in-line polycycle with reference to
single track vehicles, like bicycle and motorcycle. It
is composed of a head module which is a classical
bicycle followed by some pedal modules as shown in
Fig. 1.
Figure 1: Anaconda with two pedal modules.
This vehicle can transport several people one on
each module. Modules are connected each other by
spherical joints, and each pedal module is equipped
with a rear steered wheel so as its rider can contribute
in the vehicle balance and help in the following the
prescribed path; while the rider on the head module
decide which path to follow.
In this conceptual model, electric generators
provide energy when riders pedal. This energy is
managed by a central unit in order to redistribute it in
a proper manner to motor-wheels and store the
exceeded energy in batteries (Verlinden and Kabeya,
2012; Kabeya and Verlinden, 2010).
Anaconda as bicycles are human-powered
vehicles and nowadays the latter are used as healthy
and less pollutant transportation means. Riding a
bicycle can be learned intuitively and, when
mastered, this activity becomes a second nature.
However, the dynamic behaviour behind the
bicycle riding is more complex. The modularity of the
Anaconda makes its dynamic behaviour much more
complex than that of the bicycle and its investigation
is a challenging task.
The main issues in studying single track vehicle
are their stability characteristics and their dynamic
behaviour; and literature contains papers outlining
their dynamic studies (Sharp, 1985; Sharp, 1971;
Limebeer and Sharp 1971; Cossalter, 2006, Meijaard
et al., 2007).
This paper is concerned with the stability of an
Anaconda composed of one pedal module. Thanks to
the well established stability analysis of single track
vehicle, the aim of this study is to describe the lateral
stability of the Anaconda and to figure out the
influence of the pedal module. Numerical simulations
are carried out on multibody models of the vehicles;
based on the EasyDyn framework. Models concerned
in this study are those of the head module alone, the
Kabeya Tshibamba, P., Dituba Ngoma, G. and Erchiqui, F.
Numerical Investigation of the Lateral Dynamic Behaviour of the Anaconda.
DOI: 10.5220/0010551403190326
In Proceedings of the 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2021), pages 319-326
ISBN: 978-989-758-528-9
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
319
pedal module alone and an Anaconda with one pedal
module. Simulation results allow us to get more
insight in the lateral stability features of this vehicle
and to figure out the pedal module influences.
2 EasyDyn FRAMEWORK AND
VEHICLE’S MODELS
2.1 EasyDyn Framework
The studied mechanical models are developed
according to a multibody approach influenced by
EasyDyn (Verlinden et al., 2005; Verlinden et al.,
2013).
EasyDyn is C++, open source and flexible,
multibody library from the Department of the
Theoretically Mechanics, Dynamics and Vibrations
of the Faculty of Engineering of the University of
Mons in Belgium.
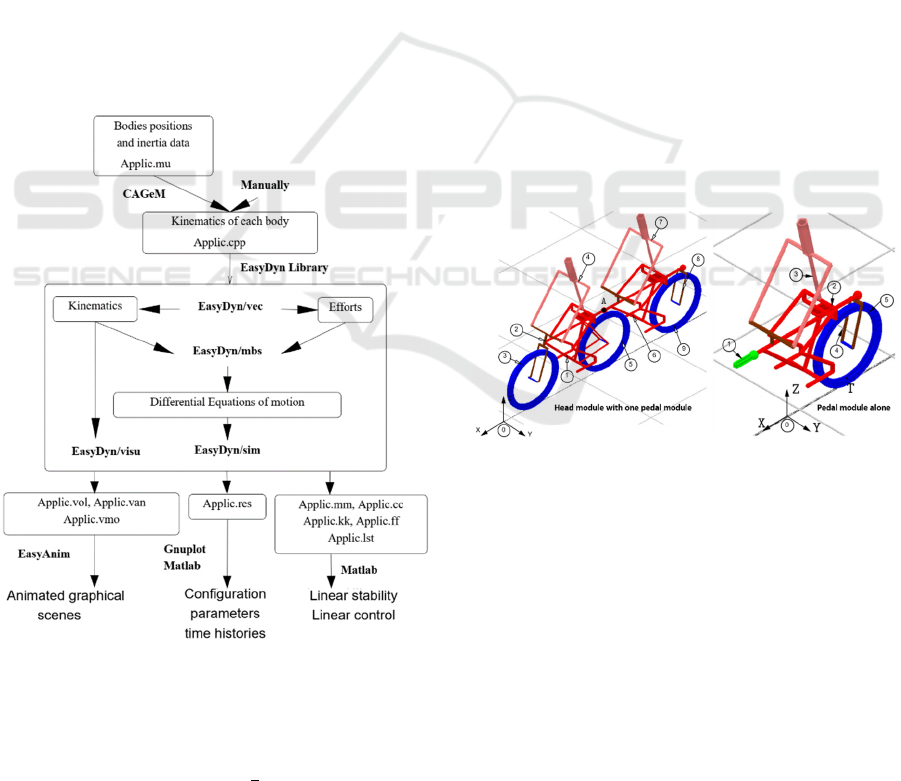
EasyDyn uses minimal coordinates to describe the
kinematics of rigid bodies connected by joints, thanks
Figure 2: EasyDyn simulation data flow.
to homogeneous transformation matrices; and the
principle of virtual power to derive the equations of
motion which are then integrated according to the
Newmark scheme (Newmark-
). Fig. 2 depicts the
simulation data flow in the EasyDyn framework.
The process starts with a Mupad file (Applic.mu)
which contains bodies’ inertia data and their relative
configurations expressed in term of the vehicle
configuration parameters. A symbolic tool called
CAGeM is used to generate symbolically the
kinematics of the vehicle. The resulted C++ file
(Applic.cpp) from CAGeM contains basic EasyDyn
command lines; and the user can include in this file
other EasyDyn command lines dedicated to his
application. Among the output files of this process
there are those required for the stability analysis of
the multibody systems under this research.
2.2 Mechanical Model
The Anaconda mechanical model was presented in
(Verlinden and Kabeya, 2012); where a multibody
approach was used by taking into account the
confirmed modelling assumptions made for single
track vehicle: bodies are considered to be rigid,
rider’s lower body is firmly attached to the module
frame, rider’s upper body can rotate about the
longitudinal axis of the module frame, tire-ground
contact is modelled as force element.
Fig. 3 illustrates the mechanical models of an
Anaconda composed of a head module with one pedal
module and a pedal module alone.
Figure 3: Riders-vehicle mechanical model.
The number of bodies (n
b
) and the one of degrees
of freedom (n
cp
) of each system are summarized in
Tabs. 1 and 2. Parameters defining these degrees of
freedom are considered as configuration parameters.
Three vehicle’s models are investigated in this
work:
The head module alone: n
b
= 6, n
cp
= 10;
The pedal module alone: n
b
= 6, n
cp
= 6;
The Anaconda with one pedal module: n
b
= 10,
n
cp
= 16.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
320
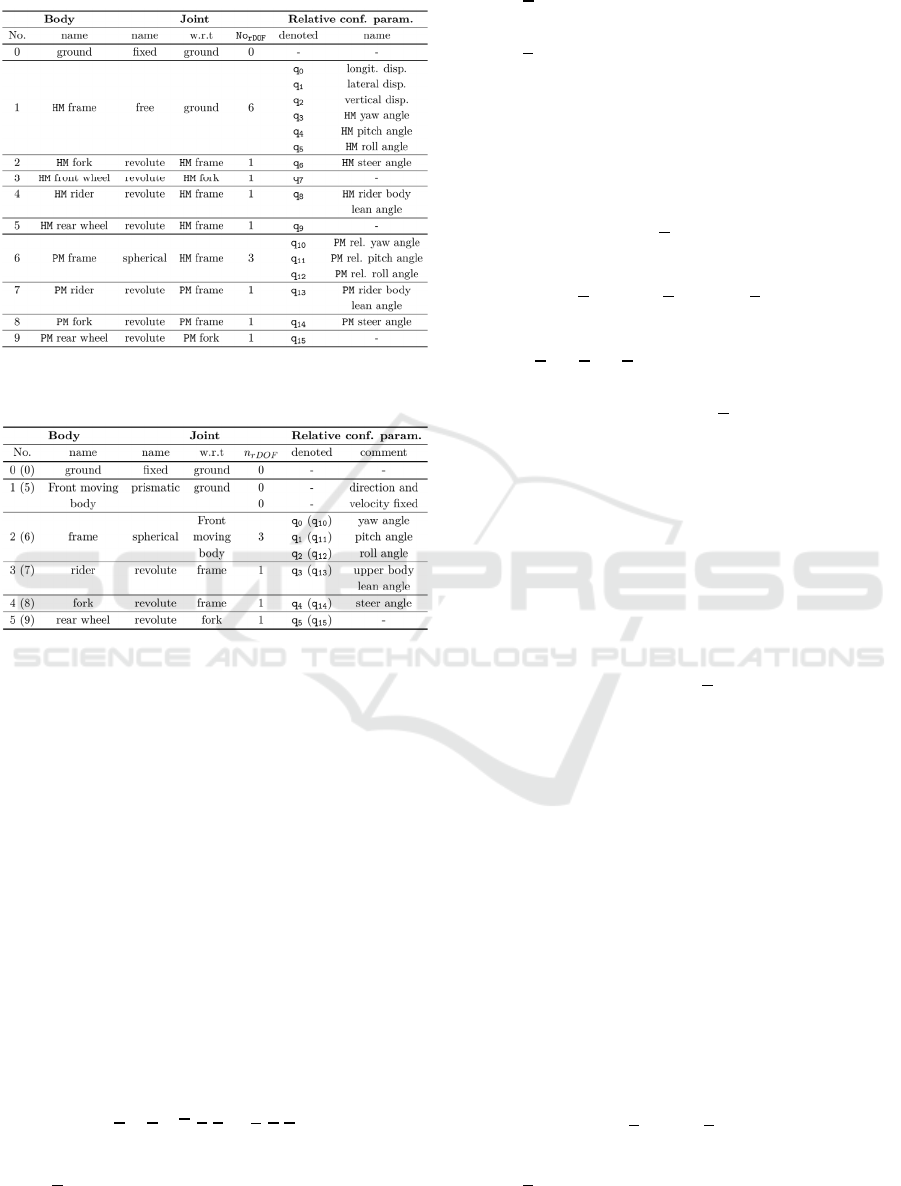
Table 1: Bodies and their relative degrees of freedom for
the Anaconda with one pedal module.
Table 2: Bodies and their relative degrees of freedom for
the pedal module alone.
Taking advantages of the parametric and generic
model of the Anaconda implemented in EasyDyn
(Kabeya and Verlinden, 2011), the numerical model
of the head module alone and the one of the Anaconda
with one pedal module are derived from the same
mechanical model.
The implementation of the pedal module alone is
made apart from the mechanical model presented in
Fig. 3. The pedal module is considered as a trailer
towed by a front moving body, replacing the head
module, whose motion is imposed. Physically, this
corresponds to the hypothesis that the head module
motion is not affected by the one of the pedal module.
2.3 Mathematical Model
For each vehicle’s model, the n
cp
second order
equations of motion are derived and recasted in a
matrix form as:
M(q
) . q
+ h(q,q
) = g(q,q
,t)
(1)
where:
q
is a (n
cp
,1) vector gathering all the
configuration parameters;
M is a (n
cp
,n
cp
) mass matrix;
h
is a (n
cp
,1) vector gathering contributions of
centrifugal and Coriolis forces;
g
is a (n
cp
,1) vector gathering contributions of
external forces.
The forces taken into account in these models are
gravity and tyre-ground contact forces.
Furthermore, equations of motion are linearized
around a stationary state, defined as the state in which
the vehicle is let going straight ahead in a constant
configuration position q
and at a constant forward
velocity. The linearized equations are given as:
M . Δq
+ CT . 𝚫q + KT . 𝚫q = 0
(2)
where:
Δq
= q – q
is the relative configuration
parameter vector defined with respect the
stationary state position q
;
CT is a (n
cp
,n
cp
) tangent damping matrix;
KT is a (n
cp
,n
cp
) tangent stiffness matrix.
For the linearization state, the lateral or out-of-
plan dynamic is decoupled from the in-plane one
(Koenen, 1983). Then sub matrices concerned with
out-of-plane dynamic: the reduced mass matrix (M
),
the reduced tangent damping (C
) and the reduced
tangent stiffness matrix (K
) are drawn from their
respective counterparts of the entire linearized system
by taking into account only the concerned
configuration parameters ( q
). The configuration
parameters involved in the out-of-plane dynamic are:
The lateral displacement, the yaw, roll and steer
angles for the head module alone: n
r
= 4;
The yaw, roll and steer angles for the pedal
module alone: n
r
= 3;
The combination of the above two
configuration parameters for an Anaconda with
one pedal module: n
r
= 7.
Moreover, it is to highlight that rider’s upper body
degree of freedom is frozen in these models. This
configuration parameter together with the rider’s legs
are involved in the human control activities
attempting to maintain the vehicle balance. Their
influence where proved to be less significant with
respect to the steer angle (Kooijman et al., 2009).
The out-of-plane matrices are recasted in an
equivalent state space model:
x
= A . x
(3)
where:
x
is the reduced state vector of dimension (n
s
,1)
with n
s
= 2*n
r
; and is equal to
Numerical Investigation of the Lateral Dynamic Behaviour of the Anaconda
321
x =
q
q
(4)
A is the evolution matrix of dimension (n
s
,n
s
)
defined from the reduced matrices as:
A =
0I
−(M
)
K
−(M
)
C
(5)
with 0 and I the zero and identity matrices of
appropriate dimensions.
The evolution matrix is used in the sequel for the
computation of eigenvalues and eigenmodes of the
vehicle’s out-of-plane dynamic. Positions of
eigenvalues in the complex plane will vary with the
forward speed. The stability analysis of eigenmodes
is rely on these positions.
3 SIMULATION RESULTS
3.1 Modes Determination Procedure
For each vehicle, simulations are made as follows:
The vehicle is brought in a steady state
condition letting it run straight ahead at a
constant velocity. The velocity ranges from 0.2
to 10 m/s with a step of 0.1 m/s are selected;
The linearization of the equations of motion is
performed around this steady state
configuration;
The text files containing the matrices of the
linearized equations of motion from EasyDyn
are retrieved under Matlab where the subset of
the lateral dynamics is extracted and recasted in
an equivalent state space model.
Eigenvalues are computed for each forward
velocity and their evolution analysed.
The two first step are performed with EasyDyn.
Combination of the information from eigenvalues
evolution over the forward speed, mode shapes and
their animations are used to distinguish them from
each other.
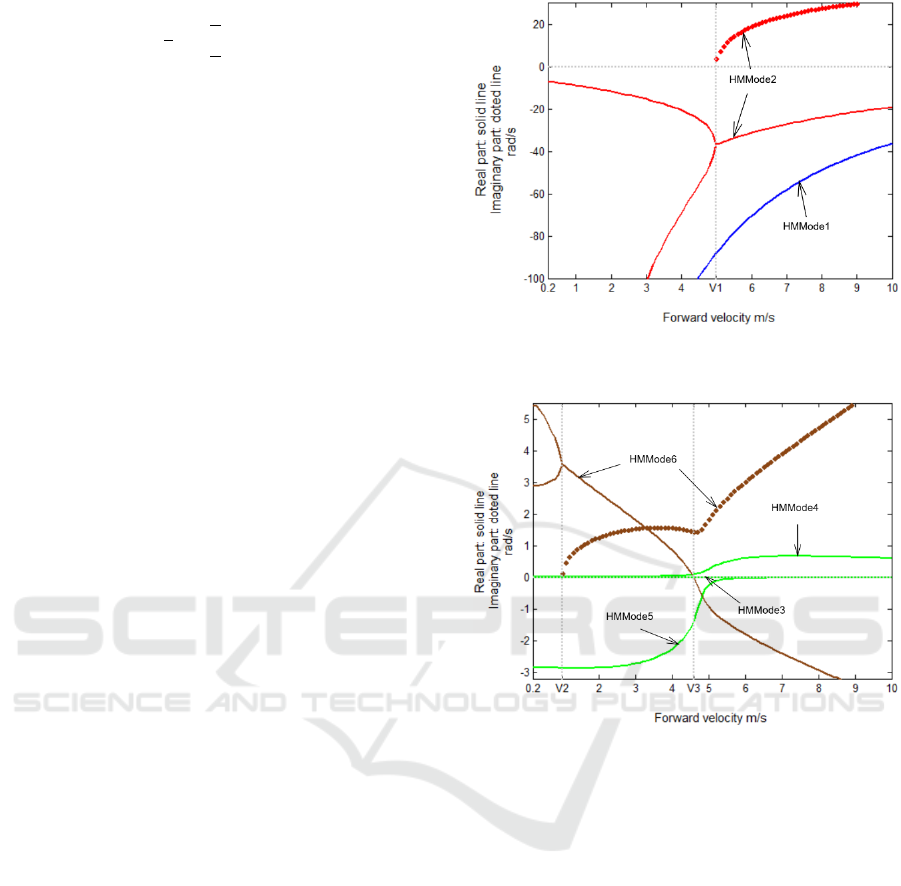
3.2 Modes of the Head Module Alone
According to the considered mechanical model, six
distinct head module’s modes are observed from the
eight eigenvalues computed. They are denoted from
HMMode1 to HMMode6. Evolutions of their
eigenvalues over the forward speed are given in Figs.
4 and 5.
Figure 4: HM modes evolution over the forward speed
range (HMMode1 and HMMode2).
Figure 5: HM modes evolution over the forward speed
range (HMMode3, HMMode4, HMMode5 and
HMMode6).
HMMode1, 2, 3 and 5 are stable modes whereas
HMMod4 and 6 are unstable ones. HMMode6
evolves to the stable region as the forward speed
increases with a crossing speed V3 equal to 4.6 m/s.
All modes are non-oscillatory except HMMode2 and
6 that start in this form with two branches that merge
(at V1 = 5 m/s and V2 = 1 m/s) and became
oscillatory.
Some of these modes are common with the ones
of single track vehicles: HMMode1, upper branch of
HMMode2, HMMode5 and HMMode6. They
correspond to the classical wobble, caster, capsize
and weave modes.
Let us mention that HMMode1 is characterized by
a dominant steer angle motion in opposite phase with
the one of the roll angle as it can be seen in Fig. 4. In
this figure, aside the mode shape (left) there is a
screenshot (right) that illustrate its vibrational
behaviour.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
322
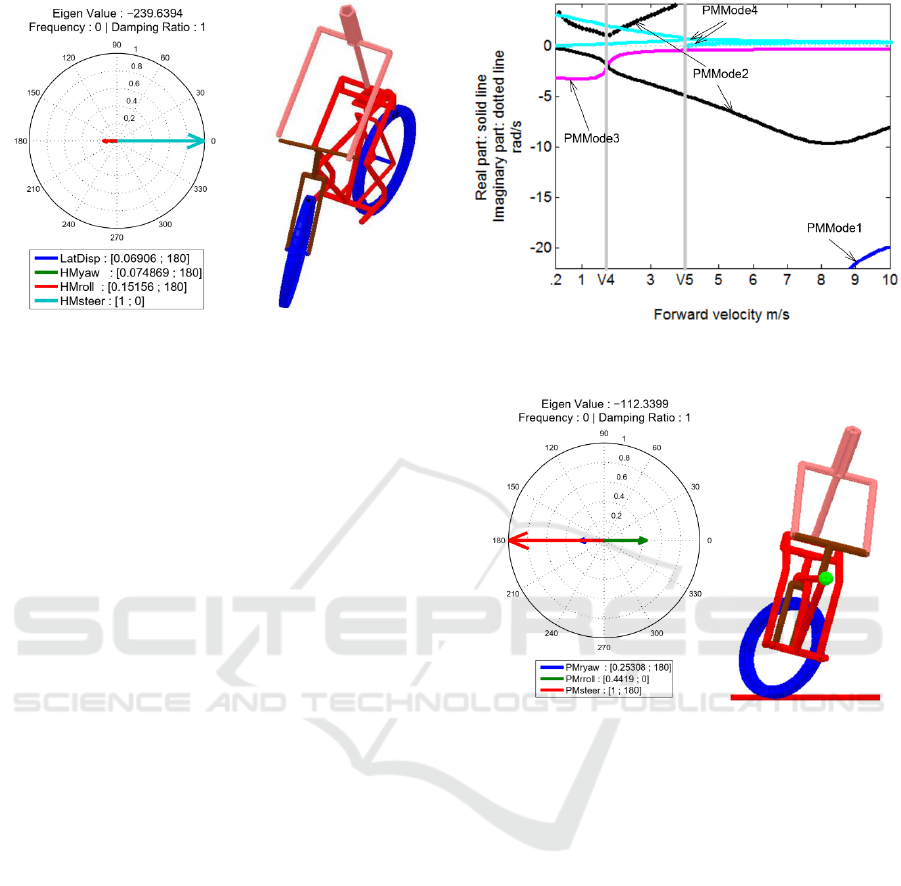
Figure 6: HMMode1 shape (right) and screenshot of its
vibrational motion (left) at 2 m/s.
This faster mode is responsible of the counter
steering phenomenon. In this investigated mechanical
model, HMMode1 is stable and non-oscillatory as the
wobble mode of a simplified motorcycle (Cossalter
and Roberto, 2015). The unstable and oscillatory
wobble encounter in bicycle model is due to the
implementation of the front frame flexibility and the
tire dynamics (Sharp, 2008; Dressel and Rahman,
2010).
Moreover, HMMode3 has an eigenvalue equal to
zero and characterized by a large lateral displacement
as HMMmode4. This behaviour is observed also with
HMMode4 and 5 when they are close the HMMode3
(below 4.2 m/s and above 5.5 m/s, respectively).
3.3 Modes of the Pedal Module Alone
The six eigenvalues computed exhibit four distinct
pedal module modes denoted from PMMode1 to 4.
Their evolutions over the forward speed are given in
Fig. 7.
Furthermore, PMMode1 to 3 are stable modes
whereas PMMode4 is the only unstable mode.
PMMode1 is also non-oscillatory like HMMode1
but slower with time constant value varying from 6E-
4 to 5E-2 second. It is characterized by a roll motion
in antiphase with those of the yaw and steer angles.
This can be seen on the mode shape in Fig. 8 (left).
Below 8.6 m/s, the steer motion is the dominant one;
and above this speed the roll motion become
dominant. This antiphase configuration feature
between the roll and the steer angles characterizes the
steer into the lean manoeuvre required to keep the
pedal module in equilibrium. Which means that the
rear steered handlebar play its designed role. The
steer into the lean manoeuvre is illustrated in Fig. 8
(right).
Figure 7: PM modes evolution over the forward the forward
speed range.
Figure 8: PMMode1 shape (right) and screenshot of its
vibrational motion (left) at 3 m/s.
In addition, PMMode2 behaves the same way as
PMMode1 but in an oscillatory manner with
frequencies varying from 0.64 Hz at the beginning of
the simulation process (at 0.2 m/s) to 3 Hz at 10 m/s.
A the forward speed of 1.7 m/s a frequency minimum
value of 0.17 Hz is reached together with a maximum
damping ration of 84%.
The yaw and the steer angle motions are the only
ones involved in PMMode3 and PMode4. PMMode3
is a non-oscillatory mode whereas PMMode4 is a
quasi-oscillatory one above V5 = 4.1 m/s. This
unstable begins with two non-oscillatory branches
that merge at V5 in an oscillatory form with a
maximum frequency equal to 5.7E-2 Hz reached at
8.8 m/s. The yaw and steer motions evolves in (quasi)
antiphase configuration for these pedal module
modes (see Fig. 9 (left)). The screenshot of
PMMode4 shown in Fig. 9 (right) suggests that as
time increases, higher yaw angle will be reached
(indeed slowly) due to the unstable nature of this
Numerical Investigation of the Lateral Dynamic Behaviour of the Anaconda
323
mode. This will lead the pedal module to hit the front
one.
Figure 9: PMMode1 shape (right) and screenshot of its
vibrational motion (left) at 3 m/s.
3.4 Modes of the Anaconda with One
Pedal Module
From the fourteen eigenvalues computed, only ten
distinct modes are found out to be distinct for the
Anaconda with one pedal module. They are denoted
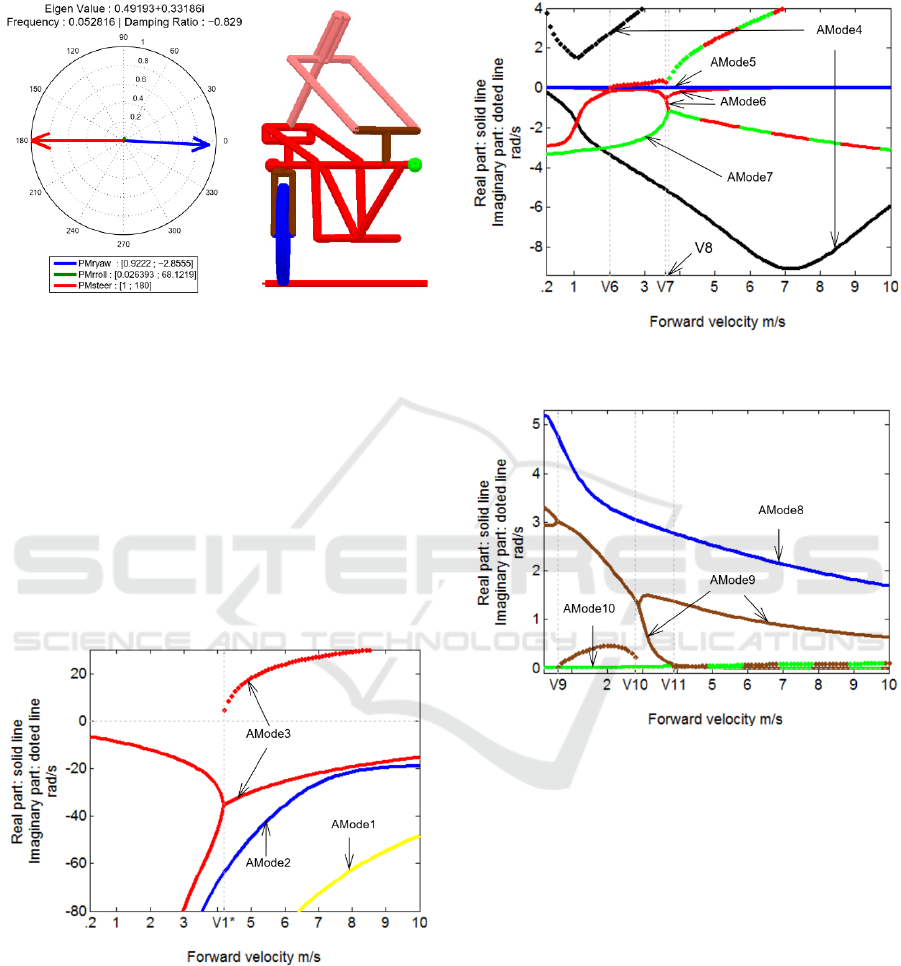
from AMode1 to 10. Figs. 10, 11 and 12 depict the
evolutions of their eigenvalues with the forward
speed.
The first figure (Fig. 10) is concerned with stables
modes having lower time constant in the speed range.
Figure 10: First group of stable modes of the Anaconda
(AMode1, AMode2 and AMode3).
Moreover, each mode of the Anaconda with one
pedal module is found out to be a combination of one
mode of the head module and another one of the pedal
module; the head and the pedal modules being
considered alone as mentioned above.
Fig. 11 and 12 illustrate the remainder stable
modes and the unstable ones respectively.
Figure 11: Second group of stable modes of the Anaconda:
AMode4, AMode5, AMode6 and AMode7.
Figure 12: Unstable modes of the Anaconda: AMode8,
AMode9 and AMode10.
In summary, Tab. 3 relates each Anaconda mode with
its combination.
In addition, AMode1 and AMode2 are non-
oscillatory evolving over the speed range with an
increasing time constants like HMMode1 and
PMMode1.
AMode3 is oscillatory and a replication of
HMMode2. The weak influence of the pedal module
on this mode can be observed on shapes of both
modes (see Fig. 13). In these modes, the dominant
motion is the one of head module yaw angle.
AMode4, AMode5 and AMode10 are other cases of
complete replication of a mode over the speed range.
Particularly, Fig. 14 shows the replication of
PMMode2 in AMode4.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
324
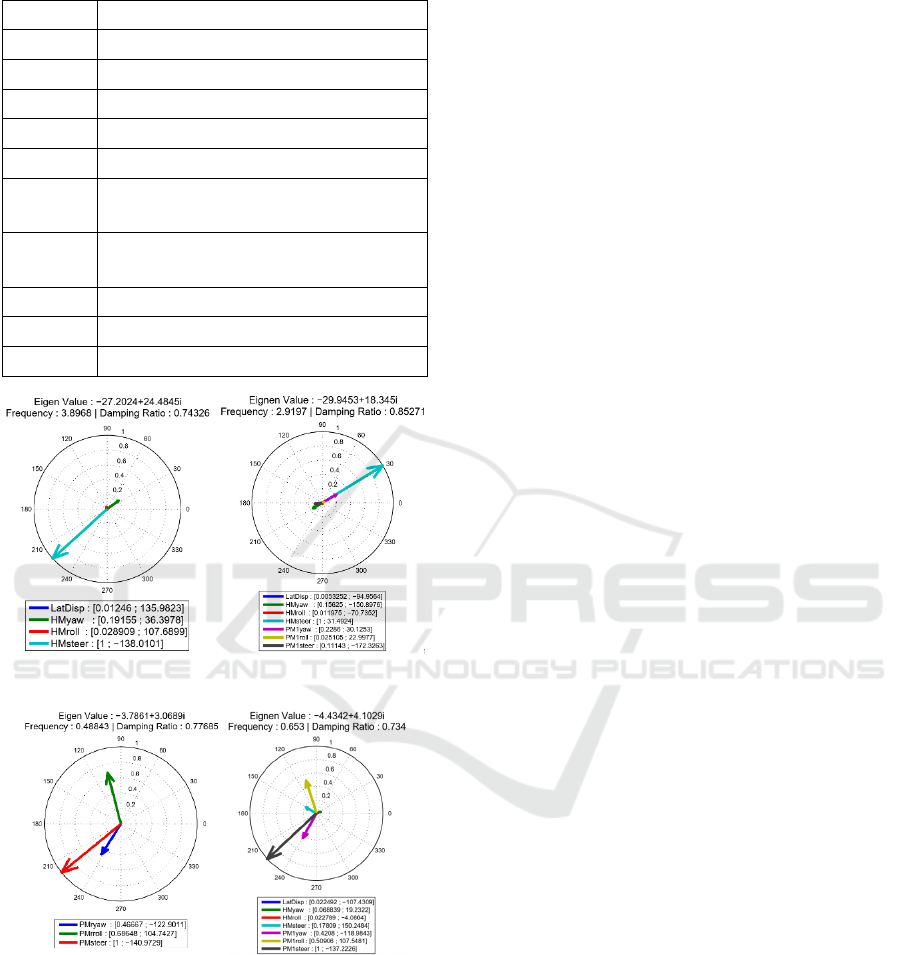
Table 3: Anaconda modes combinations.
AMode Combination
AMode1 HMMode1 + PMMode1
AMode2 HMMode2 lower branch + PMMode1
AMode3 HMMode2 + fixed pedal module
AMode4 fixed head module + PMMode2
AMode5 HMMode3 + fixed pedal module
AMode6 fixed head module + PMMode3 (v < V6)
Deformed shape of AMode6 (V6 < v < V7)
AMode7 HMMode5 + fixed pedal module (v < V7)
HMMode5 + PMMode3 (v > V7)
AMode8 HMMode5 + PMMode4
AMode9 HMMode6 + PMMode4
AMode10 fixed head module + PMMode4
Figure 13: Shapes of HMMode2 and AMode3.
Figure 14: Shapes of PMMode2 and AMode4.
Indeed, AMode6 begins with two non-oscillatory
branches below V6 = 2 m/s (replication of PMMode3
for the lower branches). These branches merge at this
speed in a quasi-oscillatory form up to V7 = 3.6 m/s.
In this speed range, the replication of PMMode3 is
slightly deformed by the presence of the lateral
displacement motion in anti-phase with the one of the
pedal module steer angle and in quasi-phase with the
one of the pedal module yaw angle. Beyond V8,
AMode7 is non-oscillatory and a replication of
HMMode5. From this speed, it merges with the lower
branch of AMode6 in an oscillatory form. In this
latter form, modes HMMode5 and PMMode3 are
combined.
It is emphasized that when the real part of an
eigenvalue is close to zero, the corresponding mode
shape is characterized by a dominant lateral
displacement motion.
The capsize (HMMode5) and weave HMMode6)
are the bicycle modes involved in the combination of
the unstable modes of the Anaconda: AMode8,
AMode9 and AMode10. Except AMode8 which
evolves over the speed range in a non-oscillatory
manner, AMMode9 and AMMode10 switch from one
form to another over the speed range (V9 = 0.6 m/s,
V10 = 2.9 m/s and V11 = 3.9 m/s).
They are known to be controllable at any forward
speed. Their combination with PMModes4 yields
unstable modes with real parts below 5 rad/s (but still
decreasing with the forward speed); so as the unstable
modes of the Anaconda can be controlled in the
human capabilities.
4 CONCLUSIONS
This study is concerned with the out-of-plane
dynamic of an Anaconda with one pedal module. The
linearization of nonlinear equations of motion of the
vehicle around a stationary state is required and
numerical simulations are carried out for some
forward speed in a speed range to get more insight in
the lateral behaviour of the Anaconda. All these tasks
are accomplished thanks to a co-simulation process
between EasyDyn and Matlab. Taking advantage of
the dynamic behaviours of the Anaconda’s
components it was found out that component modes
are combined each other or replicated in order to form
the one of the Anaconda. Particularly, the only one
unstable mode of the pedal module considered alone
is involved in the Anaconda’s unstable modes. The
analysis of the evolution of these unstable modes of
the Anaconda help to draw conclusions that tackle a
control issue for driving the Anaconda by human
drivers.
ACKNOWLEDGEMENTS
Authors are grateful to the School of Engineering’s
Department of the University of Quebec in Abitibi-
Témiscamingue.
Numerical Investigation of the Lateral Dynamic Behaviour of the Anaconda
325

REFERENCES
Verlinden, O., Kabeya, T. P., 2012. Presentation and
assessment of rideability of of a novel single track
vehicle: the Anaconda. Vehicle System Dynamics
(ISSN: 0042-3114), vol. 50, no. 8, pp. 1297-1317.
Kabeya, T. P., Verlinden, O., 2010. Simulation and Control
of the Anaconda. Proceeding of the Bicycle and
Motorcycle Dynamics, Symposium on the Dynamics
and Control of Single Track Vehicles, 20-22 October
2010, Delft, The Netherlands.
Sharp, R. S. (1971). The stability and control of
motorcycles. Proceedings of the IMechE, Part C,
Journal of Mechanical Engineering Science, 13:316–
329.
Limebeer, D. J. N., Sharp, R. S., 1971. Bicycles,
motorcycles and models: Single-track vehicle modeling
and control. IEEE Control Syst. Mag., 26(5):34–61.
Sharp, R. S., 1985. The lateral dynamics of motorcycles and
bicycles. Vehicle System Dynamics, 14:265–283.
Cossalter, V., 2006. Motorcycle Dynamics. Lulu, second
edition.
Meijaard, J. P., Papadopoulos, J. M., Ruina, A., and
Schwab, A. L., 2007. Linearised dynamics equations
for the balance and steer of a bicycle: a benchmark and
review. Proceeding of the Royal Society A:
Mathematical, Physical and Engineering Sciences,
463(2084):1955–1982.
Verlinden, O., Kouroussis, G., and Conti, C., 2005.
Easydyn: a framework based on free symbolic and
numerical tools for teaching multibody
systems. In Proceedings (on CD) of the ECCOMAS
Thematic Conference Multibody Dynamics, Madrid,
Spain.
Verlinden, O., Ben Fékih, L., and Kouroussis, G., 2013.
Symbolic generation of the kinematics of multibody
systems in EasyDyn: From MuPAD to Xcas/Giac.
Theoretical and Applied Mechanics Letters,
3(1):013012.
Kabeya, P., Verlinden, O., 2011. Application of
the multibody approach to the modeling of the
Anaconda. In Proceedings of the MULTIBODY
DYNAMICS, ECCOMAS Thematic Conference,
Brussels, Belgium.
MathWorks, T. I. 2005. Matlab version 7.1.
Koenen, C., 1983. The Dynamic Behaviour of a Motorcycle
when running straight ahead and when cornering. PhD
thesis, Delft University.
Kooijman, J., Schwab, A., Moore, J. K., 2009. Some
observations on human control of a bicycle. In
Proceedings of the ASME, International Design
Engineering Technical Conferences & Computers and
Information in Engineering Conference IDETC/CIE,
page 8 pp, San Diego, California, USA.
Cossalter, V., Roberto, L., 2015. Dynamics of motorcycle.
http://www.dinamoto.it/dinamoto/index_eng.html.
[Accessed online 2015-03-07].
Sharp, R. S., 2008. On the stability and control of the
bicycle. Applied Mechanics Reviews, 61(6):1–24.
Dressel, A. E., Rahman, A., 2010. Measuring dynamic
properties of bicycle tires. In Proceedings of Bicycle
and Motorbike Dynamics 2010, Symposium on the
Dynamics and Control of Single Track vehicles, Delft,
The Netherlands.
SIMULTECH 2021 - 11th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
326
