
Wearable MIMUs for the Identification of Upper Limbs Motion in an
Industrial Context of Human-Robot Interaction
Mattia Antonelli
1a
, Elisa Digo
1b
, Stefano Pastorelli
1c
and Laura Gastaldi
2d
1
Department of Mechanical and Aerospace Engineering, Politecnico di Torino, Turin, Italy
2
Department of Mathematical Sciences “G. L. Lagrange”, Politecnico di Torino, Turin, Italy
Keywords: MIMU, Upper Limb, Motion Prediction, Industry 4.0, Linear Discriminant Analysis, Movement
Classification.
Abstract: The automation of human gestures is gaining increasing importance in manufacturing. Indeed, robots support
operators by simplifying their tasks in a shared workspace. However, human-robot collaboration can be
improved by identifying human actions and then developing adaptive control algorithms for the robot.
Accordingly, the aim of this study was to classify industrial tasks based on accelerations signals of human
upper limbs. Two magnetic inertial measurement units (MIMUs) on the upper limb of ten healthy young
subjects acquired pick and place gestures at three different heights. Peaks were detected from MIMUs
accelerations and were adopted to classify gestures through a Linear Discriminant Analysis. The method was
applied firstly including two MIMUs and then one at a time. Results demonstrated that the placement of at
least one MIMU on the upper arm or forearm is suitable to achieve good recognition performances. Overall,
features extracted from MIMUs signals can be used to define and train a prediction algorithm reliable for the
context of collaborative robotics.
1 INTRODUCTION
Technological developments of Industry 4.0 are
increasingly oriented to the automation of human
gestures, supporting operators with robotic systems
that can perform or simplify their task in the
production process. In this innovative industrial
context, collaborative robotics can be considered safe
if the human and the robot can coexist in the same
workspace. Indeed, the ability of the robot to detect
obstacles, even dynamic ones offered by human
movements, is crucial. Hence, the machine has to
integrate with sensors recording human motion and
systems processing these data, to avoid collisions and
accidents (Safeea and Neto, 2019).
Once the safety is guaranteed, the collaboration
between human and robot could be further improved
by identifying human actions, timings and paths and
consequently developing adaptive control algorithms
for the robot (Lasota, Fong and Shah, 2017; Ajoudani
a
https://orcid.org/0000-0002-4549-1822
b
https://orcid.org/0000-0002-5760-9541
c
https://orcid.org/0000-0001-7808-8776
d
https://orcid.org/0000-0003-3921-3022
et al., 2018). In this perspective, the prediction of
human activities plays a fundamental role in human-
machine interaction. Indeed, some literature works
have already adopted human motion prediction to
improve the performance of robotic systems, by
reducing times of tasks execution while maintaining
standards of safety (Pellegrinelli et al., 2016;
Weitschat et al., 2018).
The operation of human motion prediction
requires a reliable tracking of the human trajectory
and movement in real-time. The capture of human
movement could be carefully performed by using
vision devices such as stereophotogrammetric
systems and RGB-D cameras (Mainprice and
Berenson, 2013; Perez-D’Arpino and Shah, 2015;
Pereira and Althoff, 2016; Wang et al., 2017; Scimmi
et al., 2019; Melchiorre et al., 2020). However,
despite their precision, vision systems have some
disadvantages such as encumbrance, high costs,
problems of occlusion, and long set-up and
Antonelli, M., Digo, E., Pastorelli, S. and Gastaldi, L.
Wearable MIMUs for the Identification of Upper Limbs Motion in an Industrial Context of Human-Robot Interaction.
DOI: 10.5220/0010548304030409
In Proceedings of the 18th Inter national Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 403-409
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
403
calibration times. All these aspects make vision
technologies not suitable for an industrial context to
assess human-robot interaction.
The recent development of a new generation of
magnetic inertial measurement units (MIMUs) based
on micro-electro-mechanical systems technology has
given a new impetus to motion tracking research
(Lopez-Nava and Angelica, 2016; Filippeschi et al.,
2017). Indeed, wearable inertial sensors have become
a cornerstone in real-time capturing human motion in
different contexts such as the rehabilitation field
(Balbinot, de Freitas and Côrrea, 2015), sports
activities (Hsu et al., 2018) and industrial
environment (Safeea and Neto, 2019). Even if they
are not excellent in terms of accuracy and precision,
MIMUs are cheap, portable, easy to wear, and non-
invasive. Moreover, they overcome the typical
limitations of optical systems because they do not
suffer from occlusion problems, they have a
theoretically unlimited working range, and they
reduce calibration and computational times. For these
reasons, the adoption of wearable MIMUs in an
industrial context of human-robot interaction could
be deeper investigated.
Two previous studies have been conducted with
the intent of improving the human-robot
collaboration by collecting and analyzing typical
industrial gestures of pick and place at different
heights. The upper limbs motion of ten healthy young
subjects has been acquired with both a
stereophotogrammetric and an inertial system. The
first work has promoted the creation of a database
collecting spatial and inertial variables derived from
a sensor fusion procedure (Digo, Antonelli, Pastorelli,
et al., 2020). Since results have highlighted that the
obtained database was congruent, complementary,
and suitable for features identifications, the study has
been amplified. Indeed, the second work has
developed a recognition algorithm enabling the
selection of the most representative features of upper
limbs movement during pick and place gestures.
Results have revealed that the recognition algorithm
provided a good balance between precision and recall
and that all tested features can be selected for the pick
and place detection (Digo, Antonelli, Cornagliotto, et
al., 2020).
However, these two studies have involved the use
of an optical marker-based system, which is
unsuitable for an industrial context of human-robot
interaction. Accordingly, the present work has
concentrated only on features collected tracking the
human upper limbs movement with MIMUs. Ten
healthy young subjects have executed pick and place
gestures at three different heights. Two inertial
sensors on the upper arm and forearm of participants
have been considered for data analysis. In detail, the
aim was to adopt MIMUs to guarantee the same
classification performances obtained with markers
trajectories optimizing the experimental set-up and
reducing the computational times.
2 MATERIALS & METHODS
2.1 Participants
Ten healthy young subjects (6 males, 4 females) with
no musculoskeletal or neurological diseases were
recruited for the experiment. All involved participants
were right-handed. Mean and standard deviation
values of subjects’ anthropometric data were
estimated (Table 1). The study was approved by the
Local Institutional Review Board. All procedures
were conformed to the Helsinki Declaration.
Participants gave their written informed consent
before the experiment.
Table 1: Anthropometric data of participants.
Mean (St. Dev)
Age (years) 24.7 (2.1)
BMI (kg/m
2
) 22.3 (3.0)
Upper arm length (cm) 27.8 (3.2)
Forearm length (cm) 27.9 (1.5)
Trunk length (cm) 49.1 (5.2)
Acromions distance (cm) 35.9 (3.6)
2.2 Instruments
The instrumentation adopted for the present study
was composed of an inertial measurement system. In
detail, four MTx MIMUs (Xsens, The Netherlands)
were used for the test. Each of them contained a tri-
axial accelerometer (range ± 5 G), a tri-axial
gyroscope (range ± 1200 dps) and a tri-axial
magnetometer (range ± 75 μ T). Three sensors
(Figure 1A) were positioned on the participants’
upper body: right forearm (RFA), right upper arm
(RUA) and thorax (THX). All MIMUs on participants
were fixed by aligning their local reference systems
with the relative anatomical reference systems of the
segments on which they were fixed. Another MIMU
(TAB) was fixed on a table with the horizontal x-axis
pointing towards the participants, the horizontal y-
axis directed towards the right side of subjects, and
the vertical z-axis pointing upward (Figure 1B). The
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
404
four sensors were mutually linked into a chain
through cables and the TAB-MIMU was also
connected to the control unit called Xbus Master. The
communication between MIMUs and a PC was
guaranteed via Bluetooth. Data were acquired
through the Xsens proprietary software MT Manager
with a sampling frequency of 50 Hz.
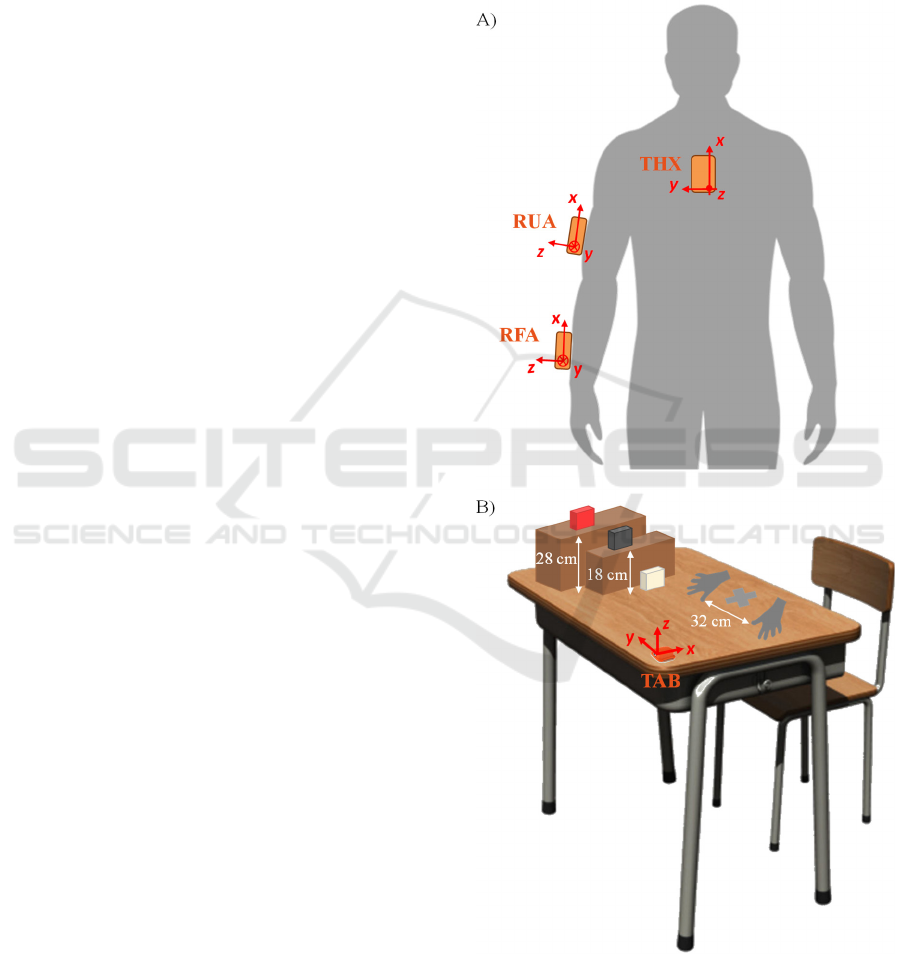
2.3 Protocol
The test was conducted in a laboratory. The setting
was composed of a table on which the silhouettes of
right and left human hands were drawn, with thumbs
32 cm apart. In addition, a cross was marked between
the hands’ silhouettes. Subsequently, three coloured
boxes of the same size were placed on the right side
of the table at different heights: a white box on the
table, a black one at a height of 18 cm from the table,
and a red one at a height of 28 cm from the table
(Figure 1B).
Subjects were first asked to sit at the table. Then,
a calibration procedure was performed asking
participants to stand still for 10 s in a seated neutral
position with hands on silhouettes. Finally, subjects
performed pick and place tasks composed of 7
operations: 1) start with hands in neutral position; 2)
pick the box according to the colour specified by the
experimenter; 3) place the box correspondingly to the
cross marked on the table; 4) return with hands in
neutral position; 5) pick the same box; 6) replace the
box in its initial position; 7) return with hands in
neutral position. During these operations, subjects
were asked not to move the trunk as much as possible,
in order to focus the analysis only on the right upper
limb.
A metronome set to 45 bpm was adopted to ensure
that each of the seven operations was executed by all
subjects at the same pace. Each participant performed
15 consecutive gestures of pick and place, 5 for every
box. The sequence of boxes to be picked and placed
was randomized and voice-scanned by the
experimenters during the test.
2.4 Signal Processing and Data
Analysis
Signal processing and data analysis were conducted
with Matlab® (MathWorks, USA) and SPSS® (IBM,
USA).
The robotic multibody approach was applied, by
modelling the upper body of participants in rigid links
connected by joints (Gastaldi, Lisco and Pastorelli,
2015). In detail, three body segments were identified:
right forearm, right upper arm and trunk. All signals
obtained from MIMUs during the registered
movements were filtered with a second-order
Butterworth low-pass filter with a cut-off frequency
of 2 Hz. Subsequently, accelerations of the MIMU on
the thorax were used to verify that the movement
principally involved only the right upper limb and not
the trunk.
Figure 1: A) Positioning of three MIMUs on participants’
upper body and their local reference systems; B)
Experimental setting with table, boxes, hands silhouettes,
cross and TAB-MIMU.
Wearable MIMUs for the Identification of Upper Limbs Motion in an Industrial Context of Human-Robot Interaction
405
As a result, only accelerations along all axes of
MIMUs on the forearm (x-RFA, y-RFA, z-RFA) and
upper arm (x-RUA, y-RUA, z-RUA) were considered
for all subjects.
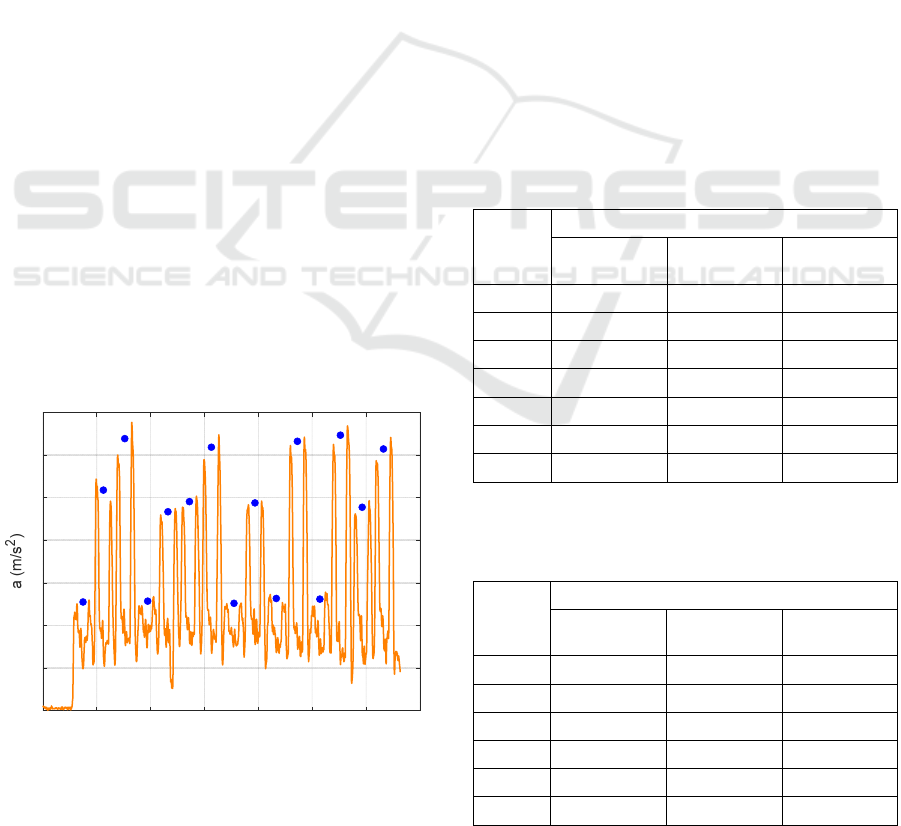
A method to identify all pick and place gestures
from MIMUs accelerations was implemented. In each
of the six signals of each participant, a pick and place
gesture of a box was recognized as a double peak.
Accordingly, for each participant, 15 pairs of peaks
were identified as corresponding to 15 performed
gestures. In Figure 2, as an example, the acceleration
signal along the x-axis for the RUA MIMU is
reported. The amplitude of each pair of consecutive
peaks was averaged calculating p
i
, with i = 1 ÷ 15
(Figure 2). Values of p
i
estimated for all signals and
all participants were collected in a single matrix of
150 rows (corresponding to 15 pick and place
gestures performed by 10 subjects) and 6 columns
(corresponding to MIMUs accelerations).
Starting from this matrix containing peaks values,
a Linear Discriminant Analysis (LDA) was
implemented and repeated considering (a) the whole
matrix, (b) only RFA-MIMU accelerations and (c)
only RUA-MIMU accelerations. Observations were
divided into two groups, one for the training (TR) and
one for the test (TT) of the algorithm. Three splits
were considered: (i) 100% TR – 100% TT, (ii) 66%
TR – 33% TT, (iii) 33% TR – 66% TT. In all cases,
the two groups were defined randomly picking the
same balanced number of observations from the three
gestures categories. Results of LDA were processed
into scatterplots, confusion matrices and F1-scores to
evaluate the classification performances. Since the
three splits produced similar outcomes, only the
results of the latter case (iii) are presented.
Figure 2: Identification of pick and place gestures from
MIMUs signals. Example of subject n°6: x-RUA
acceleration (orange) and averaged peaks values (blue dot).
3 RESULTS
In each of the three analyses (all accelerations, only
RFA-MIMU, only RUA-MIMU), LDA identified
two linear functions of data for the classification of
gestures. Considering eigenvalues of both functions,
the first one expressed alone at least 98% of data
variability in all cases (99.5% for all accelerations,
98.6% for RFA, 99.5% for RUA). Thereby, the
second function covered the remaining data
variability (0.5% for all accelerations, 1.4% for RFA,
0.5% for RUA). Accordingly, coefficients (Table 2)
and values of correlations (Table 3) of the first linear
function were reported and discussed for all three
cases.
Scatterplots represented in Figure 3 define linear
boundaries among classes regions for the three
analyses. Figure 4 depicts confusion matrices
obtained in all three cases from the classification of
pick and place gestures belonging to the test group.
Accordingly, Table 4 shows F1-scores (%) estimated
from the confusion matrices combining the precision
and the recall.
Table 2: Coefficients of the linear function 1 identified from
data in all three analyses (all accelerations, only RFA-
MIMU, only RUA-MIMU).
Coefficients
All
accelerations
RFA
MIMU
RUA
MIMU
x-RFA
1.802 -2.117
-
y-RFA
-0.442 0.546
-
z-RFA
-1.993 2.936
-
x-RUA
1.734
-
2.173
y-RUA
0.249
-
0.687
z-RUA
-0.447
-
-0.781
const
8.290 -3.409 7.159
Table 3: Values of correlations for each variable with
function 1 in all three analyses (all accelerations, only RFA-
MIMU, only RUA-MIMU).
Correlations
All
accelerations
RFA
MIMU
RUA
MIMU
x-RFA 0.546 -0.871 -
y-RFA -0.009 0.025 -
z-RFA -0.292 0.326 -
x-RUA 0.522 - 0.848
y-RUA -0.129 - -0.182
z-RUA -0.163 - -0.254
0 20 40 60 80 100 120 14
0
t
(
s
)
-8
-7
-6
-5
-4
-3
-2
-1
x-RU
A
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
406
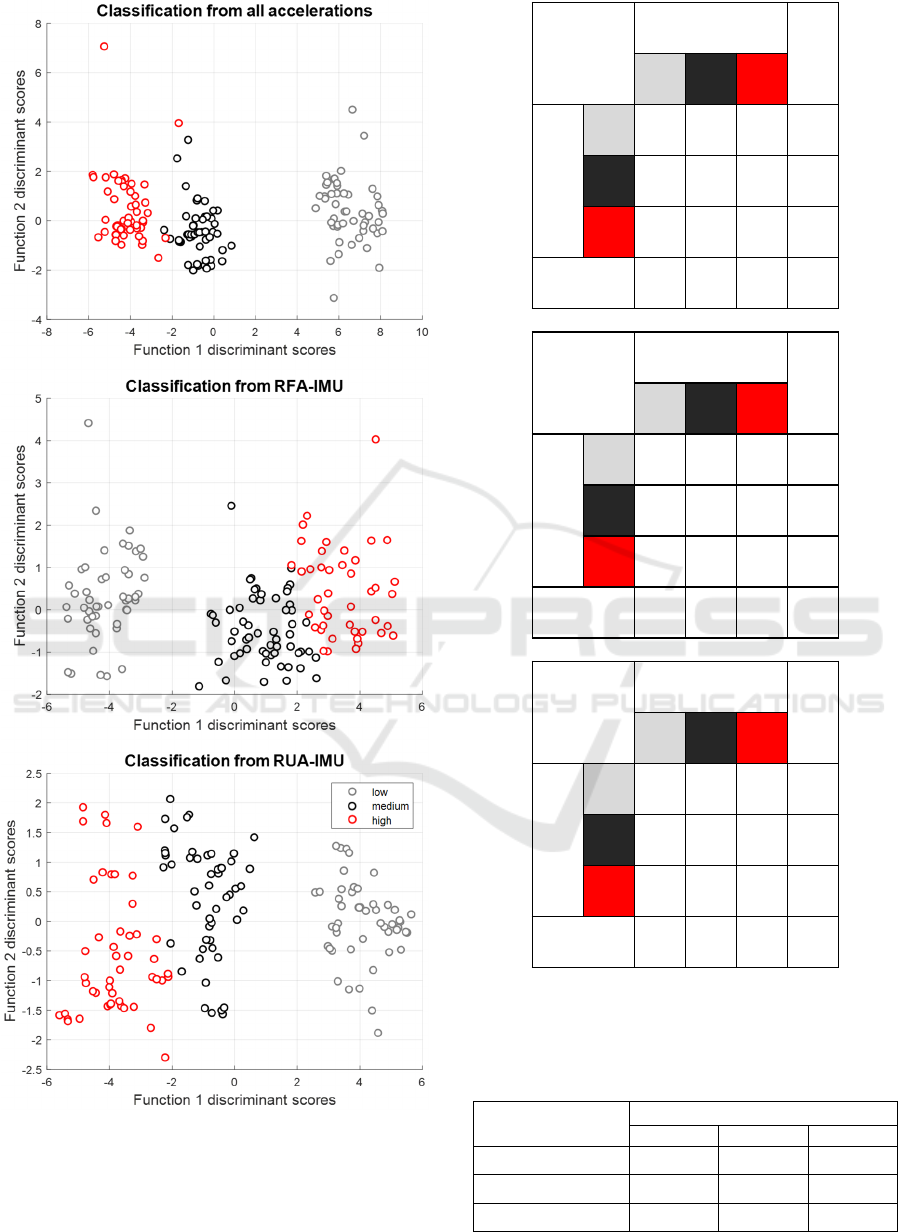
Figure 3: Scatterplots obtained from discriminant scores of
functions 1 and 2 for the three cases. Pick and place gestures
performed by all subjects are classified as low (grey),
medium (black) or high (red) ones.
Figure 4: Confusion matrices obtained from the
classification procedure in all three analyses.
Table 4: F1-scores (%) estimated for the three gestures
(low, medium, and high) of all analyses.
Analyses
F1-scores (%)
Low Medium Hi
g
h
All accelerations 100 98.5 98.6
RFA-MIMU 100 83.3 80.6
RUA-MIMU 100 82.4 81.8
All
accelerations
Predicted
Sum
Low Med High
Actual
Low
33 0 0 33
Med
032133
High
0 0 34 34
Sum
33 32 35 100
RFA
IMU
Predicted
Sum
Low Med High
Actual
Low
33 0 0 33
Med
030333
High
0 9 25 34
Sum
33 39 28 100
RUA
IMU
Predicted
Sum
Low Med High
Actual
Low
33 0 0 33
Med
028533
High
0 7 27 34
Sum
33 35 32 100
Wearable MIMUs for the Identification of Upper Limbs Motion in an Industrial Context of Human-Robot Interaction
407

4 DISCUSSIONS
The aim of the present work was to classify industrial
tasks based on MIMUs signals of human upper limbs,
to improve the human-robot interaction in a
cooperative environment. In detail, pick and place
gestures at three different heights were executed by
ten healthy young subjects and were recorded through
two inertial sensors on the upper arm and forearm.
Accelerations peaks were detected for both RFA and
RUA MIMUs and were adopted to classify pick and
place gestures by means of LDA. Hence, the
classification method was applied three times: (i) on
all six accelerations, (ii) only on RFA-MIMU
accelerations, (iii) only on RUA-MIMU
accelerations.
All three analyses provided a linear function
expressing almost all the data variability. Considering
its coefficients (Table 2), the highest absolute values
are referred to x and z accelerations for all cases. This
aspect could be caused by the boxes positioning
during the experiment. Starting from these
coefficients, the correlation values between the
accelerations and the first discriminant function were
considered for each analysis (Table 3). In all cases,
the most relevant variables in the classification
process are peaks of x-RFA and x-RUA signals,
testifying that the movement was principally
developed along their x-axis.
Considering only the RFA-MIMU, peaks of y-
acceleration could be excluded from the classification
process, due to its lowest correlation. In this way, the
computational time could be reduced in the
perspective of an almost real-time application.
According to classification results for the three
cases, observations were distributed in the plane
obtained from discriminant scores of functions
(Figure 3). The three classes occupy spatially well-
defined regions. Moreover, it is easy to notice that the
‘low’ region is better separated from the other two
due to the greater distance of the low box placement
from the medium and the high ones. This aspect leads
to a few misclassifications between medium and high
gestures of pick and place. Indeed, observing the first
column of all confusion matrices (Figure 4), the
classification of low gestures is always correct. On
the contrary, the second and third columns highlight
some wrong identifications of medium and high
gestures.
Considering the confusion matrix including all
accelerations (Figure 4), the precision is equal to
99%. Taking into account only one sensor, the
precision of the classification drops to 88%, both for
RFA-MIMU and RUA-MIMU. F1-scores calculated
for each case starting from the relative confusion
matrix (Table 4) are greater than 80%. It means that
the algorithm based on these signals provided a very
good balance between precision and recall for all
three movements. Since the F1-scores concerning all
accelerations are so high, the usage of signals
recorded by MIMUs placed on the upper arm and
forearm is suitable to identify industrial gestures of
pick and place. The F1-scores obtained using signals
provided by only one MIMU can be considered good
for both adopted sensors. For this reason, the usage of
only one of the two mentioned MIMUs guarantees a
high classification accuracy, but also it allows to
lighten the set-up. This choice can lead to various
advantages: the reduction of the encumbrance, the
rise of subject comfort in movements, the decrease of
subject preparation time, the reduction of the number
of data to elaborate and the increase in the algorithm
computational speed. These results could be exploited
in human-robot collaborative tasks, in which robots
cooperate with operators by recognizing their
gestures.
5 CONCLUSIONS
In the field of collaborative robotics, detection and
identification of gestures play a fundamental role in
an environment where humans and robots coexist and
perform tasks together. Over the year different
instrumentations have been chosen to track human
movements and to develop prediction operations
reliable in human-robot interaction.
This study aimed to overcome the shortcoming
encountered with the use of motion capture tools
unsuited to the industrial world. Starting from signals
acquired by wearable devices easy to adopt in the
industrial field, the work was intended to assess the
performance of LDA classification of typical
industrial pick and please gestures.
The conducted evaluation showed excellent
results in terms of classification precision. Indeed, a
few gestures misclassifications were committed
likely because of the proximity of boxes involved in
the movements. Thus, the use of only MIMUs for
tracking human movement can be considered suitable
for collaborative prediction procedures. In detail, the
placement of at least one inertial unit on the upper arm
or forearm is adequate to achieve good recognition
results.
Future plans are first to validate the obtained
results by applying LDA to data captured with a
stereophotogrammetric system. Moreover, other
classification methods such as Convolutional Neural
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
408

Networks could be implemented to verify the
reproducibility of the results. Other acceleration
features in addition to peaks, such as punctual values
of the jerk, means or periodicities, could be explored.
Then, also angular velocities and orientations could
be taken into account for the procedure of gesture
recognition. Starting from the features extracted from
MIMUs signals, a prediction algorithm of human
motion can be defined and trained for an industrial
context of human-robot collaboration. The prediction
operation can contribute to defining a work
environment with the robot adapting to the human.
REFERENCES
Ajoudani, A. et al. (2018) ‘Progress and prospects of the
human–robot collaboration’, Autonomous Robots.
Springer US, 42(5), pp. 957–975. doi: 10.1007/s10514-
017-9677-2.
Balbinot, A., de Freitas, J. C. R. and Côrrea, D. S. (2015)
‘Use of inertial sensors as devices for upper limb motor
monitoring exercises for motor rehabilitation’, Health
and Technology, 5(2), pp. 91–102. doi:
10.1007/s12553-015-0110-6.
Digo, E., Antonelli, M., Cornagliotto, V., et al. (2020)
‘Collection and Analysis of Human Upper Limbs
Motion Features for Collaborative Robotic
Applications’, Robotics, 9(2), p. 33. doi:
10.3390/robotics9020033.
Digo, E., Antonelli, M., Pastorelli, S., et al. (2020) ‘Upper
limbs motion tracking for collaborative robotic
applications’, in International Conference on Human
Interaction & Emerging Technologies, pp. 391–397.
doi: 10.1007/978-3-030-55307-4_59.
Filippeschi, A. et al. (2017) ‘Survey of motion tracking
methods based on inertial sensors: A focus on upper
limb human motion’, Sensors (Switzerland), 17(6), pp.
1–40. doi: 10.3390/s17061257.
Gastaldi, L., Lisco, G. and Pastorelli, S. (2015) ‘Evaluation
of functional methods for human movement
modelling’, Acta of Bioengineering and Biomechanics,
17(4), pp. 31–38. doi: 10.5277/ABB-00151-2014-03.
Hsu, Y. L. et al. (2018) ‘Human Daily and Sport Activity
Recognition Using a Wearable Inertial Sensor
Network’, IEEE Access. IEEE, 6, pp. 31715–31728.
doi: 10.1109/ACCESS.2018.2839766.
Lasota, P. A., Fong, T. and Shah, J. A. (2017) ‘A Survey of
Methods for Safe Human-Robot Interaction’,
Foundations and Trends in Robotics, 5(3), pp. 261–
349. doi: 10.1561/2300000052.
Lopez-Nava, I. H. and Angelica, M. M. (2016) ‘Wearable
Inertial Sensors for Human Motion Analysis: A
review’, IEEE Sensors Journal, 16(22), pp. 7821–7834.
doi: 10.1109/JSEN.2016.2609392.
Mainprice, J. and Berenson, D. (2013) ‘Human-robot
collaborative manipulation planning using early
prediction of human motion’, in IEEE International
Conference on Intelligent Robots and Systems. IEEE,
pp. 299–306. doi: 10.1109/IROS.2013.6696368.
Melchiorre, M. et al. (2020) ‘Vision-based control
architecture for human–robot hand-over applications’,
Asian Journal of Control, 23(1), pp. 105–117. doi:
10.1002/asjc.2480.
Pellegrinelli, S. et al. (2016) ‘A probabilistic approach to
workspace sharing for human–robot cooperation in
assembly tasks’, CIRP Annals - Manufacturing
Technology. CIRP, 65(1), pp. 57–60. doi:
10.1016/j.cirp.2016.04.035.
Pereira, A. and Althoff, M. (2016) ‘Overapproximative arm
occupancy prediction for human-robot co-existence
built from archetypal movements’, in IEEE
International Conference on Intelligent Robots and
Systems. IEEE, pp. 1394–1401. doi:
10.1109/IROS.2016.7759228.
Perez-D’Arpino, C. and Shah, J. A. (2015) ‘Fast target
prediction of human reaching motion for cooperative
human-robot manipulation tasks using time series
classification’, Proceedings - IEEE International
Conference on Robotics and Automation, pp. 6175–
6182. doi: 10.1109/ICRA.2015.7140066.
Safeea, M. and Neto, P. (2019) ‘Minimum distance
calculation using laser scanner and IMUs for safe
human-robot interaction’, Robotics and Computer-
Integrated Manufacturing. Elsevier Ltd, 58, pp. 33–42.
doi: 10.1016/j.rcim.2019.01.008.
Scimmi, L. S. et al. (2019) ‘Experimental Real-Time Setup
for Vision Driven Hand-Over with a Collaborative
Robot’, in IEEE International Conference on Control,
Automation and Diagnosis (ICCAD). IEEE, pp. 2–6.
Wang, Y. et al. (2017) ‘Collision-free trajectory planning
in human-robot interaction through hand movement
prediction from vision’, in IEEE-RAS International
Conference on Humanoid Robots, pp. 305–310. doi:
10.1109/HUMANOIDS.2017.8246890.
Weitschat, R. et al. (2018) ‘Safe and efficient human-robot
collaboration part I: Estimation of human arm motions’,
in Proceedings - IEEE International Conference on
Robotics and Automation. IEEE, pp. 1993–1999. doi:
10.1109/ICRA.2018.8461190.
Wearable MIMUs for the Identification of Upper Limbs Motion in an Industrial Context of Human-Robot Interaction
409
