
Balancing Quality and Efficiency in Private Clustering
with Affinity Propagation
Hannah Keller, Helen M
¨
ollering, Thomas Schneider and Hossein Yalame
Technical University of Darmstadt, Darmstadt, Germany
Keywords:
Privacy-preserving Machine Learning, Clustering, Secure Computation.
Abstract:
In many machine learning applications, training data consists of sensitive information from multiple sources.
Privacy-preserving machine learning using secure computation enables multiple parties to compute on their
joint data without disclosing their inputs to each other. In this work, we focus on clustering, an unsupervised
machine learning technique that partitions data into groups. Previous works on privacy-preserving clustering
often leak information and focus on the k-means algorithm, which provides only limited clustering quality and
flexibility. Additionally, the number of clusters k must be known in advance. We analyze several prominent
clustering algorithms’ capabilities and their compatibility with secure computation techniques to create an
efficient, fully privacy-preserving clustering implementation superior to k-means. We find affinity propagation
to be the most promising candidate and securely implement it using various multi-party computation techniques.
Privacy-preserving affinity propagation does not require any input parameters and consists of operations that
are relatively efficient with secure computation. We consider passive security as well as active security with an
honest and dishonest majority. We offer the first comparison of privacy-preserving clustering between these
scenarios, enabling an understanding of the exact trade-offs between them. Based on the clustering quality and
the computational and communication costs, privacy-preserving affinity propagation offers a good trade-off
between quality and efficiency for practical privacy-preserving clustering.
1 INTRODUCTION
The field of machine learning (ML) has received con-
siderable attention in recent years thanks to its mani-
fold applications. Furthermore, the increased storage
capabilities and computational power of devices enable
models to be trained on immense data pools. Train-
ing data is often aggregated from multiple sources to
increase the utility of the resulting model, and cloud
providers such as Amazon SageMaker and the Google
AI Platform offer the necessary storage and compu-
tation as a service. However, as the availability of
training data for such algorithms increases, the rele-
vance of protecting its security and privacy also grows.
Regulations such as GDPR restrict the use of personal
information, and a need for privacy-preserving solu-
tions arises.
For this reason, using secure multi-party computa-
tion (MPC) for privacy-preserving machine learning
(PPML) has become a hot research topic (Juvekar et al.,
2018; Mishra et al., 2020; Rathee et al., 2020; Patra
et al., 2021). MPC uses cryptographic techniques to
allow several parties to compute the output of a func-
tion without revealing the private input values to each
other. Using MPC, multiple data owners can securely
train an ML model without any information leakage to
an (internal or external) adversary.
In this work, we focus on clustering, a form of
unsupervised ML in which similar data points are
grouped together. Clustering algorithms are useful,
for example, to segment a market using consumer
preferences (Chaturvedi et al., 1997) or group photos
of diseased organs in medical imaging (Masulli and
Schenone, 1999). A well-known and simple clustering
algorithm is k-means (Steinhaus, 1956), which itera-
tively updates cluster centers and assignments. This al-
gorithm has been the focus of much privacy-preserving
clustering research (cf.
§
6); however, the quality of
clustering results from this algorithm is limited (cf.
§
3).
Furthermore, k-means requires the number of clus-
ters k to be chosen in advance, which is a challenge
if no party has access to the full pool of training data,
as is the case in many privacy-preserving settings. In
general, choosing parameter values for clustering al-
gorithms becomes significantly less trivial when algo-
rithms are executed in a privacy-preserving manner.
Keller, H., Möllering, H., Schneider, T. and Yalame, H.
Balancing Quality and Efficiency in Private Clustering with Affinity Propagation.
DOI: 10.5220/0010547801730184
In Proceedings of the 18th International Conference on Security and Cryptography (SECRYPT 2021), pages 173-184
ISBN: 978-989-758-524-1
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
173

Furthermore, privacy research has focused on private
clustering in the passive security model (cf.
§
2.2), ne-
glecting the stronger active security model needed to
securely perform secure computation between mutu-
ally distrusting parties.
Contributions and Outline.
After discussing the pre-
liminaries in
§
2, we provide the following contribu-
tions:
•
We give a comprehensive analysis of multiple clus-
tering algorithms with respect to their potential
for efficient and high-quality privacy-preserving
clustering with MPC techniques (cf. §3).
•
Based on our analysis, we identify affinity propaga-
tion as a promising candidate. Affinity propagation
is used in a wide variety of privacy-critical med-
ical applications, such as epilepsy (Leone et al.,
2007) and cancer detection (John et al., 2016). It
automatically determines the number of clusters
and is tolerant to outliers (cf.
§
4). We provide the
first fully privacy-preserving affinity propagation
protocol with MPC usable in the passive and active
security model.
•
We provide an experimental evaluation of our pro-
tocol in multiple security models, i.e., considering
an active/passive adversary and honest/dishonest
majority (cf.
§
5). Our results enable the assess-
ment of the overhead associated with stronger se-
curity, which is important for meaningfully balanc-
ing privacy and efficiency in privacy-preserving
clustering applications. Our code is available
at https://encrypto.de/code/ppAffinityPropagation.
We discuss related work on privacy-preserving cluster-
ing in §6 and conclude with §7.
2 PRELIMINARIES
This section introduces the preliminaries of clustering
(cf. §2.1) and secure computation (cf. §2.2).
2.1 Clustering
Clustering is an unsupervised ML technique that
groups data points into clusters. Since it is an unsuper-
vised ML technique, learning occurs without knowl-
edge of any true grouping of points or any data labels.
The goal is to group similar records into the same
cluster, while elements in different clusters should be
maximally different (Jain et al., 1999).
Clustering Algorithm Types.
We differentiate be-
tween partitioning-based, hierarchical, distribution-
based, and density-based clustering algorithms.
Partitioning-based algorithms separate the data set into
several non-overlapping groups, whose center is con-
sidered the center of the data points in this group (Xu
and Tian, 2015). Often these algorithms optimize an
objective function in an iterative fashion (Xu et al.,
1998). Examples are k-means (Steinhaus, 1956) and
affinity propagation (AP) (Frey and Dueck, 2007),
which we both examine closely in this work (cf.
§
3).
This approach realizes a hard clustering, i.e., every
input record is assigned to exactly one cluster, whereas
soft clustering, e.g., based on distributions, may assign
a point to several clusters with varying probabilities.
Distribution-based clustering approximates the origi-
nal distributions from which data points are assumed to
have been drawn (Xu and Tian, 2015), as is the case for
Gaussian mixture models clustering (GMM). Hierar-
chical clustering algorithms represent a data set as a bi-
nary tree of data points and iteratively merge or divide
clusters based on the derived tree structure (Xu and
Tian, 2015). The computational complexity of these
algorithms is very high; already the first step of most hi-
erarchical clustering algorithms, computing pair-wise
distances and performing a sort, requires
O(n
2
logn)
time complexity (Xu and Tian, 2015). Therefore, we
do not consider them as candidates for our privacy-
preserving algorithm. Density-based algorithms, such
as Density-Based Spatial Clustering of Applications
with Noise (DBSCAN) (Ester et al., 1996), cluster data
points that lie closely together in a dense area.
Clustering Quality Scores.
To measure clustering
quality, internal or external clustering indices are used.
External indices compare the clustering result to a
known ground truth, which is a known true assign-
ment of each point to a cluster. A ground truth is only
available for benchmark data sets and not present for
practical applications, since clustering is an unsuper-
vised ML technique. In those cases, internal indices
are used instead to assess the quality of a clustering
result. These indices focus on internal characteristics,
i.e., they measure the compactness of the elements
assigned to one cluster and the separation between
different clusters (Arbelaitz et al., 2013). To provide
a comprehensive quality assessment in
§
3 and
§
5, we
use an external and an internal clustering quality index:
The adjusted rand index (
ARI
) (Hubert and Ara-
bie, 1985) is a widely used (Arbelaitz et al., 2013;
Vinh et al., 2010) external index that assesses all inner-
cluster and inter-cluster data point pairs, where the 2
points were assigned to the same cluster and to differ-
ent clusters, respectively. Any pairs correctly identified
as belonging to the same cluster or to different clusters
increase the ARI value. The ARI lies in a range of
[−1,1]
, and a value of 1 indicates that the clustering
result is equal to the ground truth.
The silhouette index (
SI
) (Rousseeuw, 1987) is a
SECRYPT 2021 - 18th International Conference on Security and Cryptography
174

Table 1: MPC protocols for different security models, cat-
egorized by their security level and number of corruptions.
Names are from MP-SPDZ (Keller, 2020).
Passive Active
Dishonest Majority Semi2k SPDZ2k
Honest Majority Replicated2k PsReplicated2k
well-known internal index (Arbelaitz et al., 2013) with
range
[−1,1]
and quantifies the relation between inner-
cluster and inter-cluster distance between points. A
good result has an SI value close to 1, indicating a
small inner-cluster and large inter-cluster distance.
2.2 Multi-Party Computation (MPC)
MPC protocols allow the realization of privacy-
preserving clustering algorithms. They privately evalu-
ate an algorithm under “encryption” s.t. the inputs and
intermediate values remain hidden and only the output
is revealed. The two most prominent cryptographic
protocols for MPC are constant-round garbled circuits
(GC) by (Yao, 1986) and the multi-round Arithmetic or
Boolean Sharing protocol by (Goldreich et al., 1987).
Honest/Dishonest Majority.
This terminology spec-
ifies the fraction of possible corruptions among the
parties involved in MPC. In a dishonest majority set-
ting, the adversary may corrupt all but one party. This
setting is more complex and, thus, more expensive
than an honest majority setting, where only a minority
of parties are assumed to be corrupted.
Passive/Active Security.
Adversarial behavior can be
passive or active, which implies specific assumptions
about the adversary’s capabilities in an MPC protocol.
Passive security protects against passive adversaries,
who adhere to the protocol’s specifications while at-
tempting to learn as much as possible about that data
of other parties (Goldreich, 2009). In the active secu-
rity model, an active adversary can arbitrarily deviate
from the protocol, i.e., this model provides stronger
security guarantees. However, a trade-off between effi-
ciency and security must often be made, since actively
secure protocols incur significant overhead (Lindell
and Pinkas, 2015).
Tab. 1 contains an overview of several MPC
protocols used in our evaluation. We implement
privacy-preserving affinity propagation (cf.
§
4) with
the MP-SPDZ framework for MPC (Keller, 2020):
SPDZ2k (Cramer et al., 2018) is the first protocol for
the active, dishonest majority setting over
Z
2
k
, and
was implemented by (Damg
˚
ard et al., 2019). Semi2k
is a trimmed-down version of SPDZ2k for the passive,
dishonest majority setting. Replicated2k is a passively
secure protocol for 3 parties and honest majority based
on (Araki et al., 2016). PsReplicated2k (Eerikson et al.,
2019) extends (Lindell and Nof, 2017) to the ring set-
ting and uses ideas from (Cramer et al., 2018), offering
protection in the passive, honest majority setting.
3 ANALYSIS OF CLUSTERING
ALGORITHMS
In order to determine promising algorithm candidates
for privacy-preserving clustering, we compare the fol-
lowing prominent algorithms: k-means (Steinhaus,
1956), Gaussian mixture models (GMM) (Dempster
et al., 1977), affinity propagation (AP) (Frey and
Dueck, 2007), and Density-Based Spatial Clustering
of Applications with Noise (DBSCAN) (Ester et al.,
1996). These algorithms were selected based on (1)
their widespread use (Bano and Khan, 2018; Xu and
Tian, 2015; Xu and Wunsch, 2005) and (2) simplicity,
which is crucial for efficiency with MPC. K-means
and AP are partitioning-based algorithms (cf.
§
2.1).
GMM is a distribution-based clustering algorithm, and
DBSCAN is a density-based clustering algorithm.
The input parameters of these algorithms have a
direct impact on the clustering result and its quality. In
the following, we discuss and visualize the influence
of these parameters, as well as other characteristics
such as the tolerance to outliers, flexibility for multiple
cluster shapes, and other non-visual components on
the clustering quality. Furthermore, we investigate the
algorithms’ suitability for a privacy-preserving realiza-
tion via MPC.
3.1 Tolerance to Outliers
Data sets often contain outliers, i.e., data records that
are very untypical compared to the majority of the
set. Therefore, in the context of clustering, it is im-
perative that the clustering result, including identified
cluster centers and cluster assignments, is not distorted
or greatly affected by these data records. If a cluster-
ing algorithm either explicitly identifies outliers or if
outliers do not distort the result, this algorithm can
be considered as tolerant to outliers. Especially in a
privacy-preserving context, data owners may not know
whether their own data contains an outlier or not, since
the other data owners’ input data is unknown.
DBSCAN defines a special notion of noise that
allows outliers to be flagged as such (Ester et al., 1996;
Xu and Tian, 2015). Since AP does not require the
number of clusters as input parameter, outliers are typ-
ically detected as small, separate clusters, which can
be marked as outliers based on their size and which do
not affect the attributes of other identified clusters (Xu
and Tian, 2015). Therefore, both DBSCAN and AP
Balancing Quality and Efficiency in Private Clustering with Affinity Propagation
175
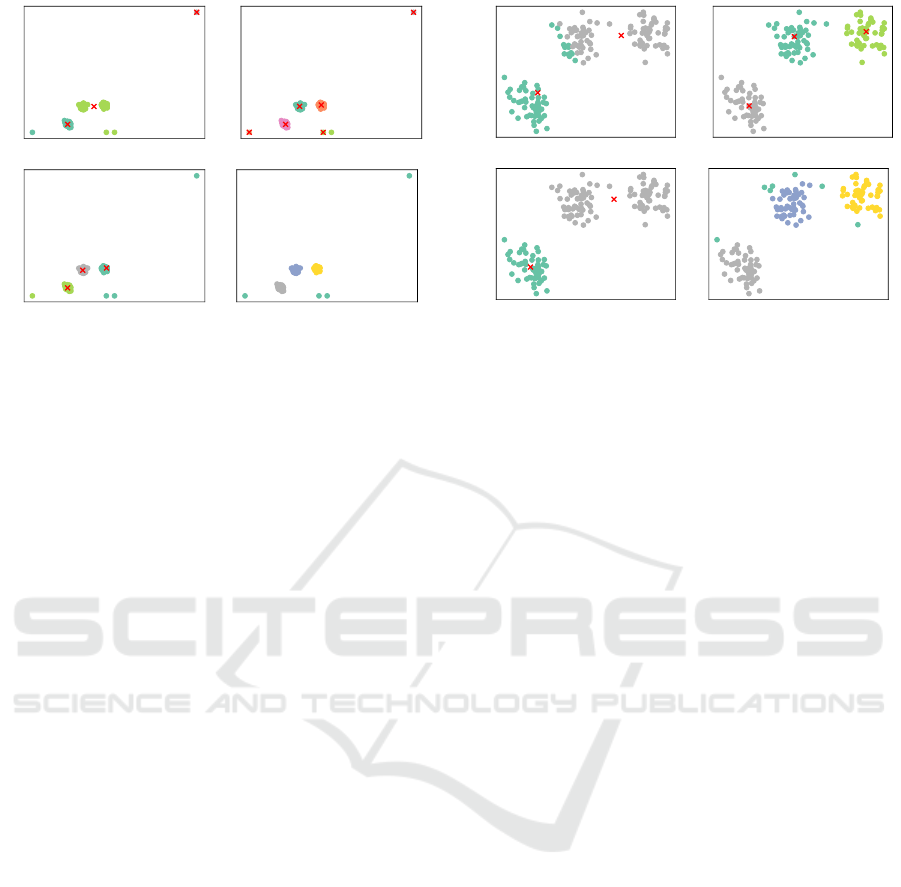
(a) K-means (k=3) (b) Affinity Propagation
(c) GMM (k=3) (d) DBSCAN
Figure 1: Example for outlier tolerance of four clustering
algorithms. The red crosses mark the clusters’ centers in the
respective clustering algorithm’s output.
are tolerant to outliers. In contrast, k-means and GMM
are both sensitive to outliers. Specifically, k-means
requires all data points to be assigned to one cluster,
even if a point does not fit to any cluster. Since the
algorithm specifies the cluster center as the mean of
all points, outliers heavily distort these centers or form
an own cluster, forcing other true clusters in the data
to become merged (Xu and Wunsch, 2005). Similarly,
the clusters resulting from GMM are assumed to have
been drawn from a Gaussian distribution, so the center
of all clusters is also the mean of data points, which is
inherently sensitive to outliers (Xu and Tian, 2015).
To demonstrate these strengths and weaknesses
of the four clustering algorithms with respect to out-
liers, we provide an example in Fig. 1. We show the
clustering results for a data set with three circular clus-
ters, each drawn from a 2-dimensional Gaussian dis-
tribution, and 4 manually added outliers. DBSCAN
(Fig. 1d) does not include the concept of cluster centers.
We provided both k-means and GMM with the correct
number of clusters k=3. However both algorithms are
sensitive to outliers. K-means (Fig. 1a) marks one
outlier as a single cluster while it merges two true
clusters to a combined one, thus, it returns a result
that is far from optimal. GMM (Fig. 1c) groups the
3 clusters correctly; however, one centroid is affected
by the outliers and, thus, not centered in the “core”
cluster. AP and DBSCAN, on the other hand, perform
well; AP (Fig. 1b) identifies the outliers as additional
clusters that do not influence the 3 other clusters and
can be identified as outliers based on their cluster size.
DBSCAN inherently identifies all outliers as such.
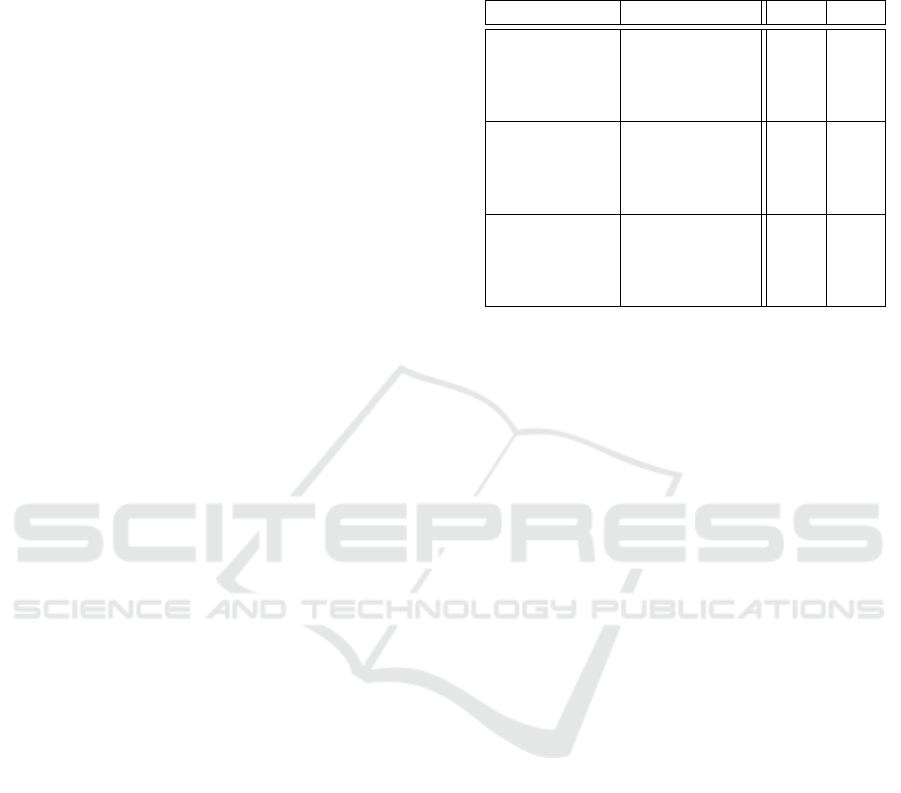
(a) K-means (k=2) (b) Affinity Propagation
(c) GMM (k=2) (d) DBSCAN
Figure 2: Effect of setting the wrong numer of clusters k
for clustering with k-means and GMM, whereas DBSCAN
and AP determine the number of clusters automatically. The
red crosses mark the clusters’ centroids in the respective
clustering algorithm’s output.
3.2 Clustering Parameters
Another problem of k-means and GMM is the neces-
sity to choose the number of clusters k in advance (Xu
and Tian, 2015). Especially in a privacy-preserving
setting, it may be difficult to set parameters like k in ad-
vance without knowledge of the entire data set. Fig. 2
shows that when the number of clusters k is set to the
wrong value (k=2 instead of 3), the clustering result of
k-means and GMM can be heavily distorted.
AP and DBSCAN do not require k to be chosen
in advance and are initialized with other parameters.
DBSCAN requires 2 parameters,
minPts
and
ε
, where
minPts
quantifies the minimal number of data points
required to form a cluster, while
ε
is the maximum
distance between 2 data points considered “neighbors.”
Especially setting
ε
can be challenging in a privacy-
preserving clustering application, as each data owner
only holds a subset of the input data. AP depends on
the preference parameter, which can be tuned manu-
ally by testing several possible values, running the AP
clustering with them, and then choosing the best one
(using a clustering quality index). Alternatively, pref-
erence can be set to the minimum or median Euclidean
squared distance between data points (Frey and Dueck,
2007). Therefore, AP is the most simple to initialize,
which is important in a privacy-preserving setting.
3.3 Other Attributes and Summary
The clustering quality scores ARI and SI (cf.
§
2.1)
for the example data sets from
§
3.1 and
§
3.2 can be
found in Tab. 2; the underlying distributions from
which these data sets were drawn are considered as the
SECRYPT 2021 - 18th International Conference on Security and Cryptography
176
ground truth. The scores confirm the visual observa-
tions discussed in the previous subsections.
We summarize the strengths and weaknesses of all
clustering algorithms in Tab. 3 including additional
attributes of each algorithm, namely flexible choice of
distance metrics, determinism, cluster shapes, compu-
tational complexity, and complex operations.
Since k-means averages input records to deter-
mine cluster centers and GMM uses the Gaussian
distribution, they do not directly support nominal
variables (Huang and Ng, 1999); AP and DBSCAN
are more flexible, as they can use any distance func-
tion (Ester et al., 1996; Frey and Dueck, 2007). Fur-
thermore, the original k-means and GMM algorithms
are instances of the expectation-maximization (EM)
algorithm, which is non-deterministic and often uses
random initialization. This initialization strategy can
lead to convergence at a local optimum (Pe
˜
na et al.,
1999). AP is deterministic (Frey and Dueck, 2007),
and DBSCAN only varies in rare cases for elements
that lie exactly in the neighborhood of elements from
different clusters (Ester et al., 1996).
So far, we focused on circular or spherical clusters,
which are non-convex. However, data can also come
in the form of elongated or irregularly shaped clus-
ters influenced, e.g., by the data’s dimensions. Since
some clustering algorithms, such as k-means and AP,
depend on a dissimilarity measure like Euclidean dis-
tance and assign points to the cluster with the closest
center, these algorithms do not perform as well on ir-
regular data sets (Xu and Tian, 2015). GMM assumes
that data is drawn from Gaussian distributions and
is therefore more flexible, since oval-shaped distribu-
tions still fall within this assumption; however, GMM
performs poorly on other irregular cluster shapes (Xu
and Tian, 2015). Since DBSCAN is based on density
of points rather than the distance to a cluster center,
DBSCAN can detect arbitrarily shaped clusters (Ester
et al., 1996). These observations are confirmed by our
experiments reported in Tab. 2.
Secure computation protocols add significant over-
head to their plaintext equivalents; therefore, we must
balance clustering quality and complexity. We in-
clude the computational complexity of all algorithms
in Tab. 3. The naive implementation of k-means and
AP have a computational complexity of
O(n
2
) (Xu and
Tian, 2015; Frey and Dueck, 2007; Ester et al., 1996),
where
n
is the number of data points. DBSCAN and
GMM, in contrast, have a complexity of
O(n
3
) when
implemented using MPC. GMM requires an expen-
sive matrix inversion operation, and DBSCAN uses
a queue or stack for cluster expansion; to obliviously
realize this queue, the computational complexity of
the original baseline DBSCAN algorithm (Ester et al.,
Table 2: Clustering quality measured with ARI and SI
(cf.
§
2.1) of the four clustering algorithms k-means, AP,
GMM, and DBSCAN for different data sets. Larger values
(best in bold) indicate a better clustering result.
Attribute Algorithm ARI SI
Outliers
(Fig. 1, §3.1)
k-means (k=3) 0.55 0.67
AP 0.96 0.85
GMM (k=3) 0.98 0.79
DBSCAN 0.96 0.83
# of Clusters
(Fig. 2, §3.2)
k-means (k=3) 0.47 0.55
AP 1.00 0.73
GMM (k=3) 0.57 0.60
DBSCAN 0.93 0.65
Shape
(§3.3)
k-means (k=3) 0.52 0.51
AP 0.61 0.50
GMM (k=3) 1.00 0.45
DBSCAN 0.95 0.45
1996) increases from
O(n
2
) to
O(n
3
) (Bozdemir et al.,
2021). Thus, privacy-preserving DBSCAN and GMM
are significantly more costly than the other algorithms.
Based on the results for the four clustering algo-
rithms, we find AP to offer a good trade-off between
clustering quality and complexity, taking its favorable
handling of outliers and easily determinable clustering
parameters into account.
4 PRIVACY-PRESERVING
AFFINITY PROPAGATION
Affinity propagation (AP) is an iterative message-
passing algorithm, where intuitively, each data point
sends two messages to all other points in every iter-
ation. A point’s first message communicates the at-
tractiveness of another point as its cluster center, or
exemplar. This message is known as the
responsibil-
ity
. Based on all received responsibility values, each
data point replies with a message quantifying its suit-
ability as a cluster center for each other point, known
as the
availability
. These messages are revised in each
iteration until a consensus emerges, which identifies
exemplars and point assignments to those exemplars.
All message updates are based on the previous changes
and the distance between data points in general. Com-
putationally, message passing is implemented through
iterative matrix updates of the availability and respon-
sibility matrices, which store the pair-wise values.
Adapting AP for MPC (cf.
§
2.2) requires an in-
depth analysis of the necessary operations of the al-
gorithm. Fortunately, AP mainly consists of multi-
plication and addition in terms of arithmetic, which
have efficient MPC instantiations based on Arithmetic
Balancing Quality and Efficiency in Private Clustering with Affinity Propagation
177
Table 3: Suitability of plaintext clustering algorithms for privacy-preserving clustering.
3
indicates that the algorithm provides
the property, while 7 indicates that it does not.
Attributes
k-means
(Steinhaus, 1956)
Affinity Propagation
(Frey and Dueck, 2007)
GMM
(Dempster et al., 1977)
DBSCAN
(Ester et al., 1996)
Automatic choice of # clusters k 7 3 7 3
Tolerance to outliers 7 3 7 3
Non-spherical cluster support 7 7 3 3
Flexible choice of distance metrics 7 3 7 3
Determinism 7 3 7 3
MPC-friendly operations 3 3 7 7
Computational Complexity in MPC O(n
2
) O(n
2
) O(n
3
) O(n
3
)
Private Clustering
Protocols (cf. §6)
Leakage of intermediate
values
e.g., (Vaidya and Clifton, 2003),
(Jagannathan and Wright, 2005)
(Zhu et al., 2012)
(Lin et al., 2005),
(Hamidi et al., 2019)
e.g., (Liu et al., 2013),
(Rahman et al., 2017)
Fully private
(Bunn and Ostrovsky, 2007),
(Patel et al., 2012),
(J
¨
aschke and Armknecht, 2019),
(Mohassel et al., 2020)
This work (Bozdemir et al., 2021)
sharing (cf.
§
2.2). Furthermore, the iterative matrix
updates of AP often require maximum or minimum
operations, which can be implemented with compar-
isons using special subprotocols for secure computa-
tion. In
§
4.1 to
§
4.3, we formalize protocols for the
constituent parts of privacy-preserving AP, where all
defined variables are secret shared among all participat-
ing parties, excluding the loop indices. This approach
hides all intermediate results, making our private AP
fully privacy-preserving, as discussed in
§
4.4.
§
4.1
discusses the necessary setup operations, including
distance calculations and a private calculation for the
preference parameter value.
§
4.2 and
§
4.3 describe
how responsibility and availability matrices are up-
dated, respectively. In practice, each update is damped
with the previous update using a weighted average of
the previous and current updates. The computation and
communication costs reported in
§
5.2 to
§
5.4 omit the
damping step to enable integer-only computation; how-
ever, including damping does not significantly change
the runtime and communication costs, since its addi-
tion only incurs two arithmetic operations per iteration:
multiplication by the damping coefficient and addition
of the components.
4.1 Setup and Output
Alg. 1 specifies the modular steps of our privacy-
preserving AP protocol for both the first distance cal-
culation, solely with addition and multiplication, and
the final choice and assignment of exemplars, mainly
using comparison operations. Before the first iteration,
the algorithm begins with the calculation of pair-wise
squared Euclidean distances for all points in the data
set in Step 5, whose additive inverses are stored in the
similarity matrix
S
. Alternatively, other distance met-
rics could be used. Our protocol automatically selects
the minimal negative difference between 2 data points
as the preference value in Step 7, as recommended
by (Frey and Dueck, 2007). This calculation easily
integrates into the initial calculation of the distance
between data points and is therefore not expensive.
Using the calculated distances, the availability and
responsibility matrices are iteratively updated until
convergence, when cluster centroids and assignments
no longer change with additional iterations. In a final
step, the state of availability and responsibility values
determines which data points are chosen as exemplars,
i.e., cluster centers.
4.2 Responsibility Update
Intuitively, the responsibility value between two data
points quantifies how likely one point is to serve as an
exemplar for the other point. The updates for responsi-
bility
r
based on availaibility
a
and similarity
s
in AP
are executed using the following rule:
r(i, k) ← s(i,k) − max
k
0
s.t.k
0
6=k
{a(i,k
0
) + s(i, k
0
)},
where responsibility
r(i, k)
quantifies the evidence for
point k as an exemplar for point
i
. Expanding and mod-
ularizing this equation for use in secure computation
yields Alg. 2.
4.3 Availability Update
The availability of one data point for another represents
how likely one point is to choose the other point as its
exemplar. Availability is quantified using two rules.
The availability
a
of a point
i
to another point
k
based
on responsibility r is:
a(i,k) ← min
(
0,r(k, k) +
∑
i
0
s.t.i
0
/∈{i,k}
max{0,r(i
0
,k)}
)
,
where availability
a(i,k)
quantifies the evidence for
point
k
to choose point
i
as an exemplar. The self-
availability, or availability for a data point
k
to itself,
SECRYPT 2021 - 18th International Conference on Security and Cryptography
178

Algorithm 1: Privacy-Preserving Affinity Propagation.
Input:
iterations iter, data set
D
with N points of
dimension features
Output: E, exemplars of all points exEach
1: S = zeros((N,N))
2: for i in range(N) do
3: for j in range(N) do
4: for k in range(features) do
5: d=(D[k][i]-D[k][j])·(D[k][i]-D[k][j])
6: S[i][j] = S[i][j] + d
7: pref = pref>S[i][j]?pref:S[i][j]
8: end for
9: end for
10: end for
11: S = -S
12: for i in range(n) do
13: S[i][i] = preference
14: end for
15: N=size(S)
16: A=zeros(N,N), R=zeros(N,N)
17: λ=0.5
18: for it in range(iter) do
19: AS = A+S
20: UpdateResponsibilityMatrix(AS,S,R)
21: UpdateAvailabilityMatrix(AS,S,A,R)
22: end for
23: E = R+A
24: ex = zeros(N)
25: exEach = zeros(N)
26: for i in range(N) do
27: ex[i] = (E[i][i]>0)?1:0
28: end for
29: for i in range(N) do
30: for j in range(N) do
31:
exEach[i]=((ex[j]
>
0)
∧
(exEach[i]
≥
0)
∧
(E[i][j]
>
E[i][exEach[i]])
∨
(ex[j]>0)∧(exEach[i]<0))?j:exEach[i]
32: end for
33: end for
34: return E, exEach
is calculated differently:
a(k, k) ←
∑
i
0
s.t.i
0
6=k
max{0,r(i
0
,k)}.
We combine, expand, and modularize these update
rules for implementation with a secure computation
protocol in Alg. 3.
4.4 Security Discussion
The security of our privacy-preserving AP protocol
follows from the security of the employed MPC tech-
niques. These techniques guarantee that a passive
Algorithm 2: Update Responsibility Matrix.
Input: AS, S, oldR
Output: R
1: R = oldR
2: row = zeros(N)
3: idx = zeros(N)
4: Y = zeros(N)
5: for r in range(N) do
6: for p in range(N) do
7: index = idx[r]
8: max = row[r]
9: idx[r] = AS[r][p]>max?AS[r][p]:index
10: row[r] = AS[r][p]>max?AS[r][p]:max
11: end for
12: end for
13: R = S-repeat(row, columnRep=N, rowRep=1)
14: for index in idx do
15: AS[index] = -inf
16: end for
17: for r in range(N) do
18: for p in range(N) do
19: Y[r] = AS[r][p]>Y[r]?AS[r][p]:Y[r]
20: end for
21: end for
22: for i in range(N) do
23: R[i,idx[i]] = S[i, idx[i]] - Y[i]
24: end for
25: return R = (1-λ)·R + λ·oldR
or active adversary learns nothing beyond what can
be learned from the output. Initially, all data owners
secret-share their clustering input among themselves
or among several non-colluding parties in an outsourc-
ing scenario (Kamara and Raykova, 2011). As these
parties have access only to secret shares, no private
information can be extracted. The distance calcula-
tions for the similarity matrix and for the preference
value are realized with Arithmetic or Boolean shar-
ing (Yao, 1986; Goldreich et al., 1987; Beaver et al.,
1990). MP-SPDZ also includes conversions between
these realizations, which are also provably secure (Ro-
taru and Wood, 2019). The same techniques are used
for all other calculations in the protocol. All data but
the output of the clustering remains secret-shared dur-
ing the entire protocol, so our privacy-preserving AP
protocol is fully privacy-preserving.
5 EVALUATION
In this section, we benchmark our privacy-preserving
AP implementation (cf.
§
4) w.r.t. the achieved clus-
tering quality, its efficiency in comparison to related
Balancing Quality and Efficiency in Private Clustering with Affinity Propagation
179
Algorithm 3: Update Availability Matrix.
Input: AS, S, oldA, R
Output: A
1: RP = zeros(N)
2: for r in range(N) do
3: for p in range(N) do
4: RP[r] = R[r][p]>0?R[r][p]:0
5: end for
6: end for
7: for i in range(N) do
8: RP(i,i) = R(i,i)
9: end for
10: sum = sum(R, dimension=1)
11:
A = repeat(sum, columnRep=1, rowRep=N) - RP
12: AP = zeros(N)
13: for r in range(N) do
14: for p in range(N) do
15: AP[r] = A[r][p]>0?0:A[r][p]
16: end for
17: end for
18: for i in range(N) do
19: AP(i,i) = A(i,i)
20: end for
21: A = AP
22: return A = (1-λ)·A+λ·oldA
Table 4: Data sets and parameter values.
Data Set Size # Clusters Iterations Preference
LSUN 400 3 127 24
Blobs
100 2 28 6
200 2 61 8
300 2 104 20
400 2 95 23
500 2 126 18.8
100 6 23 3
100 10 23 40
works, as well as its scalability.
MP-SPDZ.
We implement our protocol using the MP-
SPDZ framework for MPC (Keller, 2020). It realizes
secure multi-party computation (MPC) in the active
and passive security models with honest and dishonest
majorities. The MPC protocols of MP-SPDZ specified
in Tab. 1 run over a ring
Z
2
k
with
k = 64
bits. All
experiments are run on a 16-core machine for each
party, with a 2.8 GHz Intel Core i9-7960X processor
and 128GB RAM, running Linux. We evaluated a
LAN setting with bandwidth 10Gbps and RTT 0.2ms.
Data Sets.
Several data sets were used in our eval-
uation. First, we chose the LSUN cluster bench-
marking data set (Ultsch, 2005) for a comparison of
privacy-preserving AP’s efficiency with other works on
privacy-preserving clustering (Mohassel et al., 2020;
J
¨
aschke and Armknecht, 2019). It contains 400 2-
dimensional data points and 3 rectangular clusters, but
no outliers. Furthermore, we created artificial “blob”
data sets to benchmark privacy-preserving AP’s scala-
bility with respect to the data set’s size. For simplicity,
all clusters are spherically shaped and have a standard
deviation of 0.3, as we only use them for demonstra-
tion purposes on how to choose a preference value, as
well as runtime and communication cost benchmarks
with varying data set sizes. The artificial data sets are
also 2-dimensional, and their sizes range from 100 to
500 elements.
5.1 Clustering Quality & Input
Parameters
We first discuss the effect of input parameters on the
clustering quality. We measure the quality of a clus-
tering output with the adjusted rand index (ARI) and
silhouette index (SI), cf.
§
2.1. Here we do not focus
on other aspects, e.g., the tolerance to outliers, the
handling of nominal variables, or determinism as dis-
cussed in
§
3, but rather on the question of how to
determine AP’s input parameter, i.e., the preference, in
a privacy-preserving setting. This is a crucial question
for practical applications of privacy-preserving cluster-
ing, but was completely neglected so far by previous
work.
Tab. 4 lists the manually tuned values for prefer-
ence and the number of iterations until convergence
for all data sets that we used in this work. For the arti-
ficial “blob” data sets, AP yields a perfectly clustered
result that reflects exactly the ground truth. The result
of clustering LSUN with AP corresponds to an ARI
score (cf.
§
2.1) of 0.53 and a SI of 0.54. In comparison,
k-means (with k set to the true number of clusters as
shown in Tab. 4) results in a lower and hence worse
ARI of 0.44 and SI of 0.50.
As the data set size increases, the number of iter-
ations until convergence also increases. Furthermore,
more complex data sets like LSUN (i.e., not simply
spherical shaped clusters) require additional iterations
to converge. However, increasing the number of clus-
ters within a data set in general affects only the optimal
preference value, but not the number of iterations. Of-
ten, the optimal preference value also tends to grow
with the data set size and the number of clusters.
In a privacy-preserving setting, participants are
likely not able to tune the preference value before the
clustering given that they only have access to a subset
of the input data. In such cases, we recommend follow-
ing the suggestion of the original work that introduced
AP (Frey and Dueck, 2007) and set the preference
to a privately calculated median or minimum sum of
SECRYPT 2021 - 18th International Conference on Security and Cryptography
180
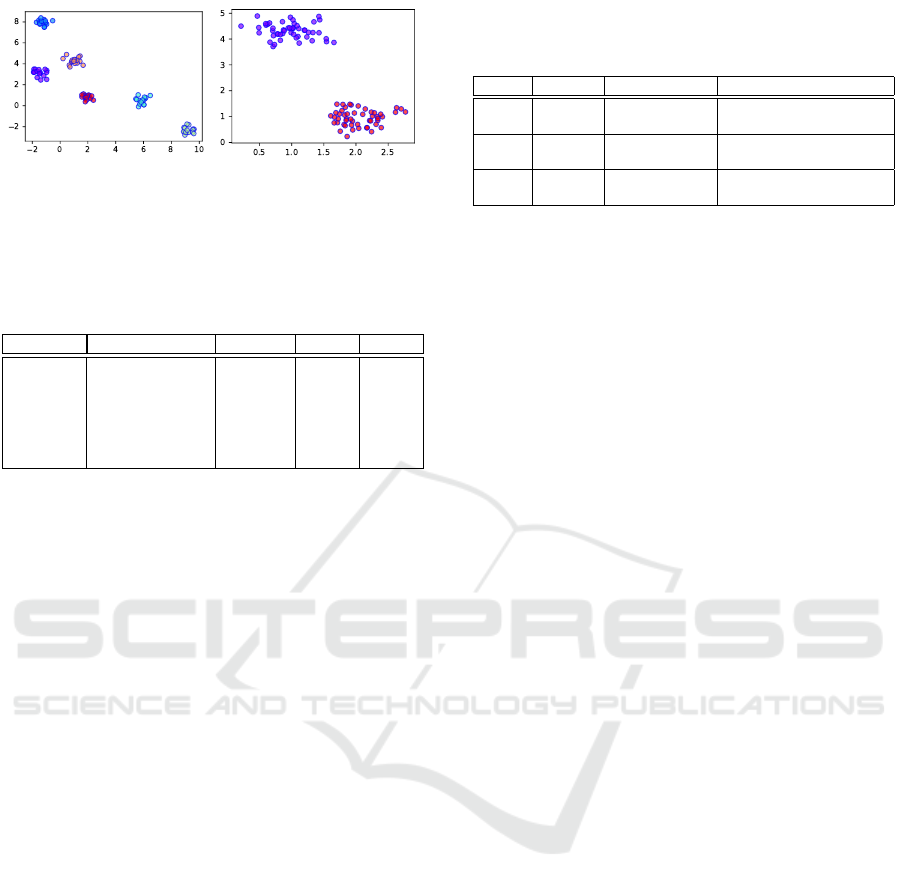
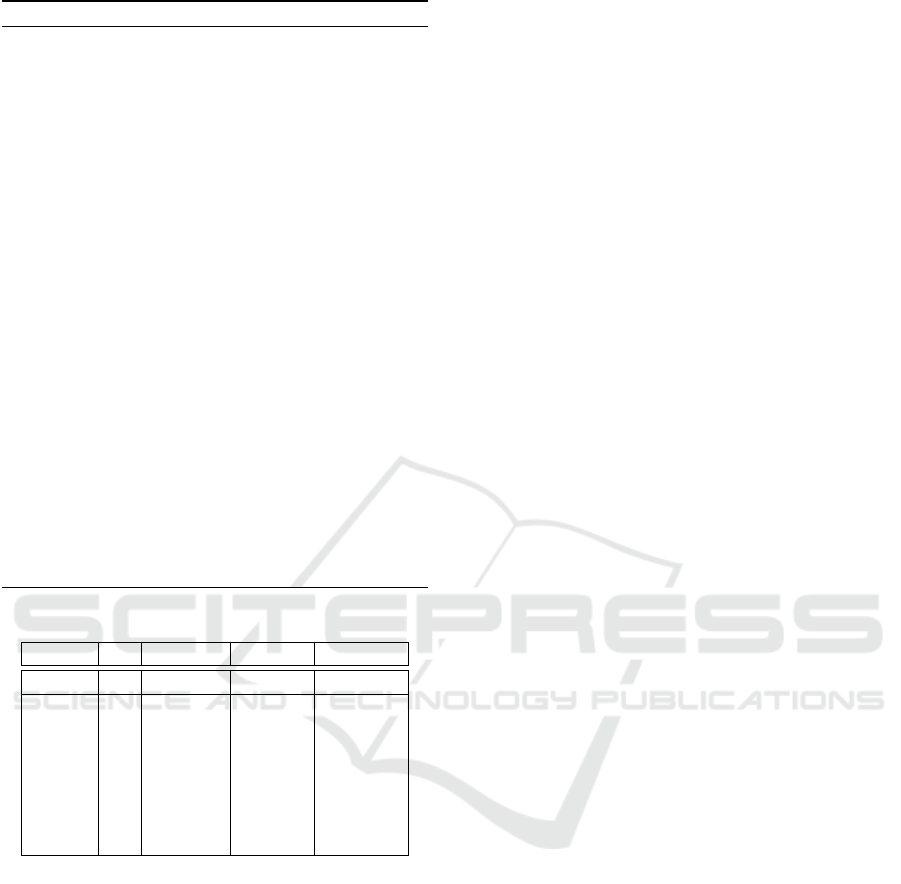
(a) Median
(b) Minimum sum
Figure 3: Example results when setting the preference value
to the median or minimum sum of squared distances between
the input records.
Table 5: Effect of the preference on number of iterations for
the “Blob” data sets with 100 elements and 2 or 6 clusters.
# Clusters Preference Iterations ARI SI
2 tuned: −6 28 1.0 0.85
2 min: −23.65 52 1.0 0.85
2 med: −4.10 27 0.50 0.32
6 tuned: −3 23 1.0 0.85
6 min: −242.78 280 0.54 0.62
6 med: −22.11 51 1.0 0.85
squared distances, which we simply call the distance
between data points. To do so, e.g., (Makri et al.,
2021; Aggarwal et al., 2010) propose efficient MPC-
protocols for computing minimum and median. This
approach often yields a good clustering result (Frey
and Dueck, 2007). For example, we give the clustering
results for our 2 artificial 100-element “Blobs” data
sets with 2 and 6 clusters in Fig. 3. Setting the prefer-
ence value to the minimum distance yields a perfect
clustering result when the data set comprises 2 clus-
ters in Fig. 3b. Similarly, the 6-cluster data set can be
clustered perfectly when the preference value is set to
the median distance as shown in Fig. 3a.
However, the preference value affects the cluster-
ing result and the number of iterations until conver-
gence. We show this effect in Tab. 5. After preference
tuning, AP converges on the 2-cluster “Blobs“ data set
after 28 iterations, while it takes 52 iterations when the
preference is set to the minimum distance (yielding the
same clustering result). Similarly, although choosing
the median distance results in a good clustering result
for the 6-cluster data set, the algorithm converges after
51 iterations, rather than 23 with tuning.
5.2 MPC Performance
We evaluate privacy-preserving AP on a wide range of
MPC protocols and give an intuition for the efficiency-
security trade-off in different security models for
privacy-preserving AP. Therefore, we benchmark the
costs associated with our privacy-preserving AP im-
plementation for all settings described in Tab. 1 on the
public data set LSUN (Ultsch, 2005). Furthermore,
Table 6: Computation and communication costs for cluster-
ing LSUN in the passive (P)/active (A) security model, as
well as for honest (H)/dishonest (D) majority.
# Parties Runtime (hr) Communication (GBytes)
P H 3 22.67 103
A H 3 33.01 550
P D 3 107.18 42,658
A D 3 660.05 312,127
P D 2 54.92 17,471
A D 2 500.19 156,079
we carried out experiments for 3 parties in an hon-
est majority setting and for both 2 and 3 parties for a
dishonest majority of parties. We executed each exper-
iment 5 times and report the average cost per iteration
(see Tab. 4 and Tab. 5 for examples how many iter-
ations are needed). All resulting computational and
communication costs for clustering LSUN in these
settings are given in Tab. 6. As expected, the honest-
majority protocols (H) are significantly more efficient
than dishonest-majority protocols (D). Compared to
passive security (P), the active security model (A) in-
creases computational costs by a factor of about
9×
for the dishonest-majority (2 parties) and about
1.5×
for the honest-majority setting (3 parties). For the
same scenarios, communication costs grow by a factor
of approximately
9×
with dishonest-majority and
5×
with honest majority protocols. To choose the most
efficient protocol, it is important to realistically assess
the behavior and capabilities of a potential adversary
w.r.t. the specific application (cf. §2.2).
5.3 Comparison to Related Work
We use the LSUN benchmark data set to compare
the efficiency of privacy-preserving AP with state-of-
the-art privacy-preserving clustering algorithms and
gauge costs for the standardized data set LSUN. Tab. 7
lists the runtime necessary to cluster LSUN using
three state-of-the-art efficient privacy-preserving k-
means and DBSCAN protocols from (J
¨
aschke and
Armknecht, 2019; Mohassel et al., 2020; Bozdemir
et al., 2021) compared to our work. Although (Mohas-
sel et al., 2020) is by a factor of 3,674
×
faster than
ours, we discussed in
§
3 that AP yields a better cluster-
ing result for many data sets (including LSUN), mak-
ing the additional costs acceptable. Similarly, the par-
allel and independent work by (Bozdemir et al., 2021)
on private DBSCAN is about 194
×
faster than ours.
However, they use an optimized hybrid combination
of secure two-party computation techniques (Demmler
et al., 2015) which is not possible with MP-SPDZ. Ad-
ditionally, (Bozdemir et al., 2021) reduce the complex-
ity of DBSCAN on LSUN to close to
O(n
2
)
by fixing
a low number of neighborhood expansions which will
likely not be possible for all kinds of datasets.
Balancing Quality and Efficiency in Private Clustering with Affinity Propagation
181
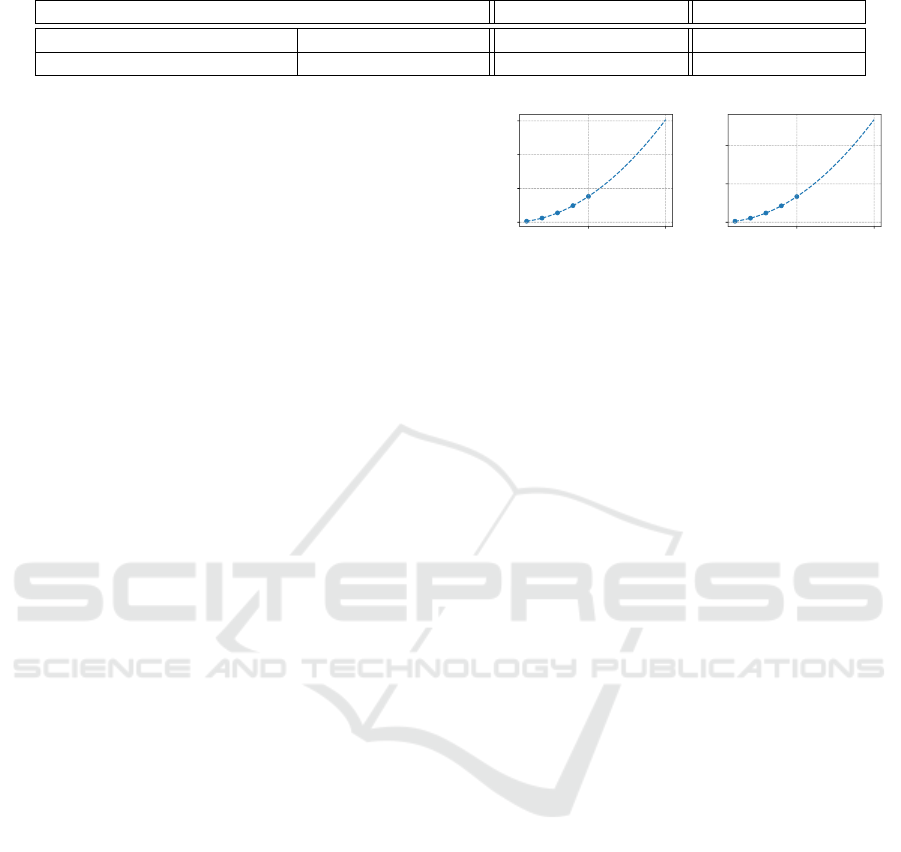
Table 7: Runtime comparison for privately clustering the LSUN data set with 2 parties and passive security.
k-means DBSCAN Affinity Propagation
(J
¨
aschke and Armknecht, 2019) (Mohassel et al., 2020) (Bozdemir et al., 2021) This work
25.79 days 22.21 seconds 420.72 seconds 22.67 hours
5.4 Scalability
We evaluate the runtime and computation costs of
privacy-preserving AP on the “Blobs” data sets (cf.
Tab. 4) with varying sizes (100, 200, 300, 400, and
500 data points) to assess the scalability of privacy-
preserving AP. This evaluation was carried out for
2 parties and the passive security model. Note that
all other MPC instantiations from Tab. 1 scale sim-
ilarly with
n
and the results are, thus, transferable
to the other security settings. Since the evaluated
data sets have different optimal preference values and
converge after a varying number of iterations, which
would influence the scaling of cost values, we re-
strict our analysis to the computational and commu-
nication costs per iteration. We listed the required
number of iterations for the data sets in Tab. 4 such
that the runtimes of the full clustering can also be
derived. Fig. 4 presents our benchmark results. As
expected based on AP’s complexity (
O(n
2
)
), the costs
grow quadratically with the number of data points
n.We extrapolate the fitted polynomial to a maximum
data set size of
n = 1000
. The fitted polynomials
are
0.0001505n
2
+ 0.001638n − 0.1583
minutes for
runtime and
0.0005357n
2
+ 0.000001406n − 0.0001
GBytes for communication.
We note that the cost per iteration is not dependent
on the number of clusters in the original data set, since
the calculations executed will be the same. The op-
timal choice of preference value and the number of
iterations required for convergence may be affected
by the true number of clusters, as discussed in
§
5.1.
Therefore, our previous observations and benchmark-
ing results hold not only for the 2-cluster data sets
evaluated, but for data sets with arbitrary numbers of
clusters. This characteristic is a clear advantage of AP
over the k-means clustering algorithm, which becomes
increasingly expensive as the number of clusters k in
the data set grows.
6 RELATED WORK
Privacy-preserving machine learning (PPML) is an
active research field, with much focus placed on cryp-
tographic methods for privacy-preserving supervised
and deep learning (Juvekar et al., 2018; Mishra et al.,
2020; Rathee et al., 2020; Boemer et al., 2020; Patra
500 1000
data points n
0
50
100
150
time (min)
(a) Runtime
500 1000
data points n
0
200
400
data sent (GBytes)
(b) Communication
Figure 4: Efficiency benchmark per clustering iteration for
privacy-preserving AP with 2 parties and passive security.
et al., 2021). As training data, often without labels,
is increasingly available, the relevance of privacy in
unsupervised learning, e.g., clustering, has also grown.
Some approaches to privacy-preserving clustering add
noise to the clustering process, providing provable
differential privacy (DP) guarantees (Su et al., 2017;
Balcan et al., 2017; Cai et al., 2020). DP is a privacy-
utility trade-off. Instead, we analyze cryptographic
approaches for achieving privacy, which yield full ac-
curacy but are more complex, so they are not directly
comparable to approaches based on DP.
Existing research on private clustering has mainly
proposed protocols for the k-means algorithm. To-
day’s most efficient protocol is (Mohassel et al., 2020).
Their work is based on MPC and provides a privacy-
preserving k-means implementation that fully pre-
serves privacy and does not incur significant compu-
tational overhead. For this reason, we compare our
privacy-preserving implementation of AP to their work
using the standard benchmark data set LSUN (cf.
§
5.3).
Other work on k-means provides privacy as well; how-
ever, some protocols use homomorphic encryption and
hence typically are significantly slower, e.g., (Bunn
and Ostrovsky, 2007; J
¨
aschke and Armknecht, 2019)
or are applicable only in certain settings, requiring
more than 2 non-colluding servers (Patel et al., 2012)
or horizontally partitioned data (Gheid and Challal,
2016). Some privacy-preserving k-means implemen-
tations have fundamental issues, leaking intermediate
cluster centers (Vaidya and Clifton, 2003; Jagannathan
and Wright, 2005; Jha et al., 2005) or information
about cluster sizes (Wu et al., 2020). In general, k-
means is a simple clustering algorithm, which explains
its popularity in privacy-preserving clustering. Un-
fortunately, its clustering capabilities and quality are
limited, as discussed in §3.
A few passively secure privacy-preserving variants
of clustering algorithms more advanced than k-means
SECRYPT 2021 - 18th International Conference on Security and Cryptography
182

have been proposed. (Bozdemir et al., 2021) design
a fully privacy-preserving DBSCAN clustering proto-
col. Unfortunately, most other protocols do not pre-
serve full privacy. For example, (Jagannathan et al.,
2010) tackle privacy-preserving hierarchical cluster-
ing, but their protocol reveals merging patterns. The
private DBSCAN protocols by (Jiang et al., 2008; Liu
et al., 2013; Rahman et al., 2017) leak information
such as parameter values, distances, cluster sizes, and
neighborhoods. (Zhu et al., 2012) propose a privacy-
preserving AP protocol for vertically partitioned data
in the passive security model using additively homo-
morphic encryption. Their protocol leaks the permuted
sensitivity values of all data records to one data owner.
7 CONCLUSION
In this work, we explored the suitability of k-means,
AP, GMM, and DBSCAN for efficient crypto-oriented
clustering. While the clustering quality of k-means is
limited for many data sets, GMM and DBSCAN are
expensive to implement using MPC techniques. AP
provides more flexibility in terms of all attributes, so
we design the first fully privacy-preserving AP with
MPC techniques and implement it with the MP-SPDZ
framework. We evaluated the resulting cluster quality
and scalability, as well as the computational and com-
munication costs for all combinations of passive/active
security and honest/dishonest majority. With this, we
are the first who evaluate the performance of a private
clustering algorithm on all 4 scenarios.
ACKNOWLEDGEMENTS
This project received funding from the European Re-
search Council (ERC) under the European Union’s
Horizon 2020 research and innovation program (grant
agreement No. 850990 PSOTI). It was co-funded
by the Deutsche Forschungsgemeinschaft (DFG) –
SFB 1119 CROSSING/236615297 and GRK 2050
Privacy & Trust/251805230, and by the BMBF and
the HMWK within ATHENE.
REFERENCES
Aggarwal, G., Mishra, N., and Pinkas, B. (2010). Secure
computation of the median (and other elements of spec-
ified ranks). In Journal of Cryptology.
Araki, T., Furukawa, J., Lindell, Y., Nof, A., and Ohara,
K. (2016). High-throughput semi-honest secure three-
party computation with an honest majority. In CCS.
Arbelaitz, O., Gurrutxaga, I., Muguerza, J., P
´
erez, J., and
Perona, I. (2013). An extensive comparative study of
cluster validity indices. Pattern Recognition.
Balcan, M. F., Dick, T., Liang, Y., Mou, W., and Zhang,
H. (2017). Differentially private clustering in high-
dimensional euclidean spaces. In International Confer-
ence on Machine Learning (ICML).
Bano, S. and Khan, N. (2018). A survey of data clustering
methods. In International Journal of Advanced Science
and Technology.
Beaver, D., Micali, S., and Rogaway, P. (1990). The round
complexity of secure protocols. In ACM Symposium
on Theory of Computing (STOC).
Boemer, F., Cammarota, R., Demmler, D., Schneider, T.,
and Yalame, H. (2020). MP2ML: A mixed-protocol
machine learning framework for private inference. In
ARES.
Bozdemir, B., Canard, S., Ermis, O., M
¨
ollering, H.,
¨
Onen,
M., and Schneider, T. (2021). Privacy-preserving
density-based clustering. In ASIACCS.
Bunn, P. and Ostrovsky, R. (2007). Secure two-party k-
means clustering. In CCS.
Cai, H., Wang, J., Liu, X., and Li, X. (2020). Dp-ap: Differ-
ential privacy-preserving affinity propagation cluster-
ing. In International Conference on Big Data Science
and Engineering (BigDataSE).
Chaturvedi, A., Carroll, J., Green, P., and Rotondo, J. A.
(1997). A feature-based approach to market segmenta-
tion via overlapping k-centroids clustering. Journal of
Marketing Research.
Cramer, R., Damg
˚
ard, I., Escudero, D., Scholl, P., and Xing,
C. (2018). SPD
Z
2
k
: Efficient MPC mod
2
k
for dishon-
est majority. In CRYPTO.
Damg
˚
ard, I., Escudero, D., Frederiksen, T., Keller, M.,
Scholl, P., and Volgushev, N. (2019). New primitives
for actively-secure mpc over rings with applications to
private machine learning. In IEEE S&P.
Demmler, D., Schneider, T., and Zohner, M. (2015). Aby-
a framework for efficient mixed-protocol secure two-
party computation. In NDSS.
Dempster, A. P., Laird, N. M., and Rubin, D. B. (1977).
Maximum likelihood from incomplete data via the em
algorithm. In Journal of the Royal Statistical Society.
Eerikson, H., Orlandi, C., Pullonen, P., Puura, J., and Simkin,
M. (2019). Use your brain! arithmetic 3PC for any
modulus with active security. In Information-Theoretic
Cryptography.
Ester, M., Kriegel, H. P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In International
Conference on Knowledge Discovery and Data Mining
(KDD).
Frey, B. J. and Dueck, D. (2007). Clustering by passing
messages between data points. Science.
Gheid, Z. and Challal, Y. (2016). Efficient and privacy-
preserving k-means clustering for big data mining. In
IEEE Trustcom/BigDataSE/ISPA.
Goldreich, O. (2009). Foundations of Cryptography: Volume
2, Basic Applications. Cambridge University Press.
Balancing Quality and Efficiency in Private Clustering with Affinity Propagation
183

Goldreich, O., Micali, S., and Wigderson, A. (1987). How
to play any mental game or A completeness theorem
for protocols with honest majority. In STOC.
Hamidi, M., Sheikhalishahi, M., and Martinelli, F. (2019).
Privacy preserving Expectation Maximization (EM)
clustering construction. In DCAI.
Huang, Z. and Ng, M. K. (1999). A fuzzy K-modes algo-
rithm for clustering categorical data. IEEE Transac-
tions on Fuzzy Systems.
Hubert, L. and Arabie, P. (1985). Comparing partitions.
Journal of Classification.
Jagannathan, G., Pillaipakkamnatt, K., Wright, R. N., and
Umano, D. (2010). Communication-efficient privacy-
preserving clustering. Transactions on Data Privacy.
Jagannathan, G. and Wright, R. N. (2005). Privacy-
preserving distributed k-means clustering over arbi-
trarily partitioned data. In International Conference on
Knowledge Discovery in Data Mining (KDD).
Jain, A. K., Murty, M. N., and Flynn, P. J. (1999). Data
clustering: A review. In ACM Computing Surveys.
J
¨
aschke, A. and Armknecht, F. (2019). Unsupervised ma-
chine learning on encrypted data. SAC.
Jha, S., Kruger, L., and McDaniel, P. (2005). Privacy pre-
serving clustering. In ESORICS.
Jiang, D., Xue, A., Ju, S., Chen, W., and Ma, H. (2008).
Privacy-preserving DBSCAN on horizontally parti-
tioned data. In International Symposium on IT in
Medicine and Education.
John, T., Jin, J., Dauwels, J., Cash, S., and Westover, B.
(2016). Clustering of interictal spikes by dynamic time
warping and affinity propagation. In International Con-
ference on Acoustics, Speech and Signal Processing
(ICASSP).
Juvekar, C., Vaikuntanathan, V., and Chandrakasan, A.
(2018).
GAZELLE
: A low latency framework for se-
cure neural network inference. In USENIX Security’18.
Kamara, S. and Raykova, M. (2011). Secure outsourced
computation in a multi-tenant cloud. IBM Workshop
on Cryptography and Security in Clouds.
Keller, M. (2020). MP-SPDZ: A versatile framework for
multi-party computation. In CCS.
Leone, M., Sumedha, S., and Weigt, M. (2007). Clustering
by soft-constraint affinity propagation: Applications to
gene-expression data. Bioinformatics.
Lin, X., Clifton, C., and Zhu, M. (2005). Privacy-preserving
clustering with distributed EM mixture modeling. In
Knowledge and Information Systems.
Lindell, Y. and Nof, A. (2017). A framework for construct-
ing fast mpc over arithmetic circuits with malicious
adversaries and an honest-majority. In CCS.
Lindell, Y. and Pinkas, B. (2015). An efficient protocol
for secure two-party computation in the presence of
malicious adversaries. In Journal of Cryptography.
Liu, J., Xiong, L., Luo, J., and Huang, J. Z. (2013). Privacy
preserving distributed DBSCAN clustering. Transac-
tions on Data Privacy.
Makri, E., Rotaru, D., Vercauteren, F., and Wagh, S. (2021).
Rabbit: Efficient comparison for secure multi-party
computation. In FC.
Masulli, F. and Schenone, A. (1999). A fuzzy clustering
based segmentation system as support to diagnosis in
medical imaging. Artificial Intelligence in Medicine.
Mishra, P., Lehmkuhl, R., Srinivasan, A., Zheng, W., and
Popa, R. A. (2020). Delphi: A cryptographic inference
service for neural networks. In USENIX Security.
Mohassel, P., Rosulek, M., and Trieu, N. (2020). Practical
privacy-preserving k-means clustering. In PETS.
Patel, S., Garasia, S., and Jinwala, D. (2012). An efficient
approach for privacy preserving distributed k-means
clustering based on shamir’s secret sharing scheme. In
Trust Management VI.
Patra, A., Schneider, T., Suresh, A., and Yalame, H. (2021).
Aby2. 0: Improved mixed-protocol secure two-party
computation. In USENIX Security.
Pe
˜
na, J., Lozano, J., and Larra
˜
naga, P. (1999). An empirical
comparison of four initialization methods for the k-
means algorithm. Pattern Recognition.
Rahman, M. S., Basu, A., and Kiyomoto, S. (2017). Towards
outsourced privacy-preserving multiparty DBSCAN.
In Pacific Rim International Symposium on Depend-
able Computing.
Rathee, D., Rathee, M., Kumar, N., Chandran, N., Gupta,
D., Rastogi, A., and Sharma, R. (2020). CrypTFlow2:
Practical 2-party secure inference. In CCS.
Rotaru, D. and Wood, T. (2019). Marbled circuits: Mixing
arithmetic and boolean circuits with active security. In
INDOCRYPT.
Rousseeuw, P. (1987). Silhouettes: A graphical aid to the in-
terpretation and validation of cluster analysis. Journal
of Computational and Applied Mathematics.
Steinhaus, H. (1956). Sur la division des corp materiels en
parties. Bulletin L’Acad
´
emie Polonaise des Science.
Su, D., Cao, J., Li, N., Bertino, E., Lyu, M., and Jin, H.
(2017). Differentially private k-means clustering and a
hybrid approach to private optimization. ACM Trans-
actions on Privacy and Security.
Ultsch, A. (2005). Clustering with SOM. In Workshop on
Self-Organizing Maps.
Vaidya, J. and Clifton, C. (2003). Privacy-preserving k-
means clustering over vertically partitioned data. In
International Conference on Knowledge Discovery and
Data Mining (KDD).
Vinh, N., Epps, J., and Bailey, J. (2010). Information the-
oretic measures for clusterings comparison: Variants,
properties, normalization and correction for chance.
Journal of Machine Learning Research.
Wu, W., Liu, J., Wang, H., Hao, J., and Xian, M. (2020).
Secure and efficient outsourced k-means clustering
using fully homomorphic encryption with ciphertext
packing technique. IEEE Transactions on Knowledge
and Data Engineering.
Xu, D. and Tian, Y. (2015). A comprehensive survey of
clustering algorithms. Annals of Data Science.
Xu, R. and Wunsch, D. (2005). Survey of clustering algo-
rithms. IEEE Transactions on Neural Networks.
Xu, X., Ester, M., Kriegel, H.-P., and Sander, J. (1998). A
distribution-based clustering algorithm for mining in
large spatial databases. In International Conference on
Data Engineering.
Yao, A. C. (1986). How to generate and exchange secrets
(extended abstract). In FOCS.
Zhu, X., Liu, M., and Xie, M. (2012). Privacy-preserving
affinity propagation clustering over vertically parti-
tioned data. In International Conference on Intelligent
Networking and Collaborative Systems.
SECRYPT 2021 - 18th International Conference on Security and Cryptography
184
