
Linked Data as Stigmergic Medium for Decentralized Coordination
Torsten Spieldenner
1,2
and Melvin Chelli
1
1
German Research Center for Artificial Intelligence (DFKI), Saarland Informatics Campus D3 2,
66123 Saarbr
¨
ucken, Germany
2
Saarbr
¨
ucken Graduate School of Computer Science, Campus E1 3, 66123 Saarbr
¨
ucken, Germany
Keywords:
Stigmergy, Stigmergic Medium, Coordination, Multi-Agent Systems, Linked Data, Semantic Web,
Nature-inspired Algorithm.
Abstract:
Algorithms inspired by nature have gained focus in research as a solution to classic coordination and optimiza-
tion problems. A certain type of these algorithms employs principles of stigmergy: in stigmergic systems,
coordination arises from agents leaving traces of their actions in the environment, or medium, that they work
on. Other agents instinctively adapt their behavior based on the traces, by which, in the end, the fulfillment of
a higher goal emerges from elementary actions of many, rather than thorough planning of complex actions of a
few. Despite the perceivable uptake of stigmergic algorithms for coordination in various domains, a common
clear understanding of a suitable digital stigmergic medium is lacking. It should however be assumed that a
well-defined, properly modelled, and technically sound digital medium provides a crucial basis for correct,
efficient and transferable stigmergic algorithms. In this paper, we motivate read-write Linked Data as generic
medium for decentralized stigmergic coordination algorithms. We show how Linked Data fulfills a set of core
requirements that we derived for stigmergic media from relevant literature, provide an application example
from the domain of digital manufacturing, and finally provide a working example algorithm for stigmergic
decentralized coordination.
1 INTRODUCTION
Coordination of tasks or resources is an ever preva-
lent topic of research in various domains, for example
in traffic and public transport (Kanamori et al., 2014;
Alfeo et al., 2018), or industrial production (Schraud-
ner and Charpenay, 2020; Cicirello and Smith, 2004).
Among research that focuses on improving appli-
cation of classic AI agent-based planning and opti-
mization techniques, there is a specific trend that em-
ploys nature inspired algorithms to solve coordination
and optimization problems (Chiong, 2009; Tzane-
tos et al., 2020). A re-occurring element from this
class of algorithms is the use of concepts of stig-
mergy (Heylighen, 2015), a behavior observed, for
example, in insect swarms: In a stigmergic system,
participants of a process leave traces in their envi-
ronment that influence subsequent behavior of other
members of the swarm, such that a community be-
havior emerges that leads the swarm closer towards a
common goal. Such nature inspired algorithms have
been found a promising approach for more flexible,
fault-tolerant, and scalable coordination of complex
systems in above mentioned domains (Krieger et al.,
2000; Ricci et al., 2007; Jevti
´
c et al., 2012; De Nicola
et al., 2020).
However, the majority of stigmergic systems in
literature are highly use-case specific, or even imple-
mentation specific. It is in particular noticeable, that
while focusing on specific algorithms and their imple-
mentations, existing work marginalizes or ignores the
importance of a proper medium. The medium is the
environment in which agents leave traces by perform-
ing actions, i.e., where stigmergic effects emerge,
and it is considered the ”the mediating function that
underlies the true power of stigmergy” (Heylighen,
2006). The question of what a proper medium con-
stitutes is particularly interesting in the world of AI
optimization and coordination, where the medium has
no tangible physical manifestation, but where agents
operate entirely in an environment that is completely
digital, while having only abstract correspondences to
real world entities.
We believe that both research and application
of stigmergic coordination algorithms can benefit
greatly from a concise common understanding of a
digital stigmergic medium. This medium should be
provided by employing widely accepted open stan-
Spieldenner, T. and Chelli, M.
Linked Data as Stigmergic Medium for Decentralized Coordination.
DOI: 10.5220/0010518003470357
In Proceedings of the 16th International Conference on Software Technologies (ICSOFT 2021), pages 347-357
ISBN: 978-989-758-523-4
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
347

dards to be independent of specific use-cases, do-
mains, or technologies that implement the algorithm.
It should be based on a well-defined, thoroughly
formalized and established foundation to allow for
soundly defined, general, transferable solutions.
Such a set of standardized and well-defined tools
comes from the world of the Semantic Web (Berners-
Lee et al., 2001). Based on the notion of Linked
Data (Bizer et al., 2008) and typically modeled
in terms of the Resource Description Framework
(RDF) (Lassila et al., 1998)
1
, the Semantic Web is
commonly promoted as a generic integration layer for
applications from various domains.
With the Internet, being the maybe largest dig-
ital medium that relies on a wide variation of stig-
mergic effects (Dipple, 2011), and being built around
technologies and principles closely related to those
of the Semantic Web, one may expect that a ma-
chine readable and writable Linked Data layer (read-
write Linked Data) in the Semantic Web may as well
provide a widely standardized, established, domain-
independent interactive medium for stigmergy-based
coordination (Dipple et al., 2013; Privat, 2012). To
this end, this paper makes the following contributions:
We derive from relevant literature a set of require-
ments towards digital media to serve as proper stig-
mergic medium; we establish read-write Linked Data
as suitable medium for stigmergic systems; and we
demonstrate the application of read-write Linked data
as stigmergic medium with an example from the do-
main of virtual manufacturing.
The remainder of the paper is structured as fol-
lows: We review relevant related literature in Sec-
tion 2. In Section 3, we recapture core concepts
of Linked Data architectures, as well as stigmergic
systems. In Section 4, we derive requirements to-
wards digital stigmergic media and discuss Linked
Data as suitable choice. We demonstrate by exam-
ple how to model a digital environment for stigmergic
coordination in Section 5, and present a prototypical
stigmergy-based coordination algorithm in 6. We dis-
cuss how by our chosen medium, the presented algo-
rithm indeed achieves benefits of stigmergic systems
in Section 7, and conclude our work and provide an
outlook upon future challenges in section 8.
2 RELATED WORK
Stigmergic systems have been thoroughly described
and analyzed (Heylighen, 2015; Dipple et al., 2013),
1
RDF 1.1 Primer document (Jan. 2021):
https://www.w3.org/TR/rdf11-primer/
and also been discussed with respect to applicability
in Web-based environments (Dipple et al., 2014; Pri-
vat, 2012).
Agents in digital stigmergic systems communicate
indirectly by reading from and writing to a shared data
space, and by this can be considered to follow a gen-
erative communication paradigm. (Gelernter, 1985;
Ciancarini et al., 1997). Practical implementations of
this paradigm were, among others, realized in the Sys-
tem Linda, based on Tuple Spaces (Gelernter, 1985).
Stigmergy has been applied in various domains as
a means for realizing coordination, for example in the
field of robotics (Matari
´
c et al., 2003; Krieger et al.,
2000; Jevti
´
c et al., 2012), or generally, distributed co-
ordination in cyber-physical manufacturing (Cicirello
and Smith, 2004; Schraudner and Charpenay, 2020).
In the field of telecommunications (Bonabeau et al.,
1998), concepts of evaporation rate and refresh rate
from the ant world were applied for managing the dy-
namic requirements of a network. In the field of traffic
and public transport, data acquired from large num-
bers of vehicles or passengers is used to predict hot-
spots and usage preference, and from this, plan more
optimal routes for individuals based on the current sit-
uation (Kanamori et al., 2014; Alfeo et al., 2018).
Ant inspired optimization techniques have been in
focus of research since the early 1990s, and various
variations have been developed ever since (Dorigo
and Blum, 2005; Heylighen, 2015). It has been shown
that bio-inspired algorithms, such as stigmergy, per-
form generally well on decentralized decision mak-
ing (Jevti
´
c et al., 2012) as well as peer-recruitment
and coordination for task accomplishments (Krieger
et al., 2000). (Koro
ˇ
sec et al., 2012) have shown a
stigmergic approach for high dimensional numerical
optimization (Differential Ant-stigmergy Algorithm,
DASA). (Chopra et al., 2017) presented a distributed
variant of the Hungarian Method for solving the Lin-
ear Sum Assignment Problem (LSAP), with multiple
agents cooperating and finding an optimal solution
for the LSAP without a central coordinator or shared
memory. In recent years, the field of Multi-Agent
Systems (MAS) has generally seen a growing inter-
est in the concept of stigmergy (Yu and Cheng, 2020;
Ricci et al., 2007; De Nicola et al., 2020; Cicirello
and Smith, 2004).
In all the bio/insect-inspired works that have been
discussed in this section, there has been no particu-
lar emphasis given to the medium to the extent that
it is described by (Heylighen, 2015). Its fundamen-
tal meaning as a shared environment that agents use
to leave traces, sense its state and act on it, has been
largely overlooked. Some of the presented works (e.g.
from the domain of traffic and transport) bypass the
ICSOFT 2021 - 16th International Conference on Software Technologies
348

medium, and rely on direct agent-to-agent communi-
cation.
The fact that often the environment (or medium)
is reduced to very basic representations, while agents
lack cognitive abilities to make better use of a poten-
tially more complex environment, has already been
observed (Ricci et al., 2007). There is moreover an
awareness of both the need for a common understand-
ing of such an environment (Charpenay et al., 2020),
and the difficulty to properly correspond concepts
from the real-world scenarios to concepts in nature in
order to properly employ those algorithms (Valcke-
naers et al., 2007). In this paper is, we discuss and
present with appropriate examples, that read-write
Linked Data layer is a suitable general stigmergic
medium for said purposes.
3 BACKGROUND
3.1 Resource-Oriented Architectures
A Resource Oriented Architecture (ROA) is built
around the notion of a Resource as common repre-
sentation for and kind of virtual or real-world enti-
ties. (Fielding and Taylor, 2000; Lucchi et al., 2008).
A resource is typically characterized by a name (iden-
tifier), its representation and links between resource
representations (Lucchi et al., 2008). As defined by
Fielding, a representation is a sequence of bytes and
metadata to describe those bytes. A resource may
be described by more than one representation at any
given time i.e., provide the same content for example
in different serializations formats. More detailed con-
siderations of this architecture can be found in (Field-
ing and Taylor, 2000).
3.2 Linked Data Systems
Linked Data
2
is a way to share and structure informa-
tion using links. It is a design principle that imple-
ments a Resource Oriented Architecture, and is built
on the HyperText Transfer Protocol (HTTP) and HA-
TEOAS (Hypermedia as the Engine of Application
State) principles. That means that Linked Data en-
ables software user-agents or applications to derive all
necessary information to understand data, or how to
interact with it, by following links as provided by the
server (Fielding and Taylor, 2000). This understand-
ing is supported by semantic annotations that describe
to a data consumer the meaning of a particular field of
data, or APIs that provide this data, thus leading to a
2
https://www.w3.org/standards/semanticweb/data
uniform understanding of the data by different appli-
cations (Verborgh et al., 2011; Mayer et al., 2016).
These semantic descriptions are typically mod-
eled using the Resource Description Framework
(RDF) (Lassila et al., 1998), (see also footnote
1
).
RDF allows to formulate statements about re-
sources in terms of triples that follow a subject-
predicate-object structure. The subject symbolizes
the resource, the predicate describes the qualitative
aspect of the resource and/or describes the relation-
ship between a subject and an object. A set of RDF
triples constitutes a labeled graph, where the subject
and object form nodes, connected by a directed edge
(from subject to object) that is labeled via the predi-
cate.
3.3 Stigmergic Media
Relevant results of research in the field of stigmergy-
based self-organization have been very concisely
summarized by Heylighen (Heylighen, 2015). We
discuss stigmergy based on the findings from this pa-
per exclusively. However, we would like to stress out
that by this work being a very thorough survey over
the topic that covers research from several decades,
we well include findings from many different re-
searchers with different view on the general topic.
Heylighen derives from his findings his own defi-
nition of stigmergy as an:
”indirect, mediated mechanism of coordination
between actions, in which the trace of an action left
on a medium stimulates the performance of a subse-
quent action” (Heylighen, 2015, p. 5).
The definitions of the core components of stig-
mergy as described in (Heylighen, 2015) are as fol-
lows. An action is considered as a causal process that
produces a change in the world. The medium is the
part of the world that undergoes changes because of
the action, and also whose state is sensed to incite fur-
ther actions. A trace is the perceivable change made
in the medium by an action, which can trigger subse-
quent actions. A trace that stimulates agents to per-
form a specific action, i.e. affords the action, is called
Affordance. Affordances typically encode condition-
action rules, which trigger an agent to perform an ac-
tion once a certain condition is met. A trace that keeps
agents from performing a particular action, is called
Disturbance.
Heylighen further identifies different variations of
stigmergy, depending how the agents interact with the
medium (pp. 19 – 27).
This includes the observation that a medium may
be worked on by either a single agent, or crowds (in-
dividual vs collective stigmergy), that agents may take
Linked Data as Stigmergic Medium for Decentralized Coordination
349

into account either mere existence of certain features
in the medium, or quantities of those (qualitative vs
quantitative stigmergy), that agents may react to di-
rect results of work in their general environment (se-
matectonic stigmergy), or to markers that were delib-
erately left by other agents (marker-based stigmergy),
that traces left by agents in the medium can stay un-
til actively being removed by other agents (persistent
traces) or over time dissipate and vanish (transient
traces), and finally, that traces in the medium may
be observable by every agent working on the medium
(Broadcast), or only to a limited number of specific
agents (Narrowcast).
For a very thorough elaboration on the various as-
pects that we covered here in a very shortened man-
ner, we refer the reader to the original paper (Hey-
lighen, 2015).
4 LINKED DATA AS DIGITAL
STIGMERGIC MEDIUM
In nature, the notions of agent and medium are de-
termined by nature itself: Ants, for example, follow
traces of pheromones left by other ants towards lucra-
tive sources of food. Here, ants are the agents, and the
ground and food are the medium. Termites use clay as
medium, steered by how the shape of their nest (made
of this very clay) has already formed. Bees use the air
as medium to guide their fellow bees to food sources
by dance patterns.
When implementing stigmergy-based algorithms
for coordination, ”agents” are usually considered to
be software AI user-agents. These agents operate on
a digital representation of the to-be-coordinated con-
cepts, which may correspond to real-world physical
artifacts (e.g. physical production machines or robots
in manufacturing scenarios, cars and traffic lights
in traffic). This partition between digital and real
world is common in agent-based coordination algo-
rithms (Dipple et al., 2014), with the partitions lately
labeled as Agent Space for the digital, and Artifact
Space for the physical representation space (Charpe-
nay et al., 2020).
4.1 Requirements for (Digital)
Stigmergic Media
From the notions and variations of stigmergic media
in the Section 3.3, we derive the following require-
ments that a digital medium should fulfill to be suited
for use in stigmergy-based systems:
R1 (Representation). The medium must be able to
represent entities of the domain in which the co-
ordination algorithm performs, and relations be-
tween them. The medium thus serves as Agent
Space. If artifacts in Artifact Space are target of
coordination, the medium must be able to provide
a representation of the physical entity in the Agent
Space, and allow access to the physical entity via
the mediums, e.g. to switch a real-world traffic
light, or start a production process on a produc-
tion machine.
R2 (Accessibility). The medium must be accessible
to the agent in the meaning that an agent must be
able to enter the medium to perform actions on it.
Furthermore, the agent must be able to navigate
through the medium to the point where an action
is to be performed.
R3 (Observability). The medium must be observ-
able (readable) for the agent to recognize condi-
tions of condition-action rules to be fulfilled in the
medium. For this, the agent needs to be able to at
least observe the existence of effects (for qualita-
tive stigmergy). The medium should further be
suitable to provide:
R3.1 (Interpretability) of observed effects in the
medium w.r.t the domain for the agent to cor-
rectly set the observed effects into relation with
each other.
R3.2 (Quantities): The medium must be able to ex-
press quantities for coordination by quantita-
tive stigmergic effects.
R4 (Consistency). For collective stigmergy, the
medium must consistently deliver the same infor-
mation to different agents at the same point of
time. In particular, if an agent induces a change
in the medium, following this change, all other
agents must observe the changed state as actual
state of the medium.
R5 (Malleability). Agents must be able to form and
change elements in the medium as result of their
action. This includes both changing the state of
existing entities within the medium (comparable
to continuing the construction of a begun nest
by a swarm of termites), and add or remove en-
tities from the medium (comparable to leaving
pheromone markers, or dissipating markers over
time). However, changing the medium should
happen in a controlled manner, leading us to the
requirement of Stability:
R5.1 Stability: Any change to the medium must be
possible without inflicting unwanted effects to
resources outside the scope of a performed ac-
tion. ”Unwanted” is in this case not to be con-
ICSOFT 2021 - 16th International Conference on Software Technologies
350

fused with changes that an agent ”unintention-
ally” left as a trace, but to be understood as an
effect that changes the state of an entity beyond
what was intended by the algorithm.
R6 (Scopes). The medium must be able to limit visi-
bility of entities and effects in terms of scopes to
allow Narrowcast of stigmergic effects.
4.2 Linked Data as Stigmergic Medium
We in the following show that read-write Linked Data
fulfills all requirements towards a digital stigmergic
medium.
Representation is achieved by the notion of represen-
tation space of resources (see Sections 3.1 and 3.2):
Read-write Linked Data being built around resource
oriented architectures provides both the tools and best
practices of how to represent both real-world and vir-
tual entities in terms of addressable resources. Con-
nections to physical artifacts is established by hav-
ing callable HTTP endpoints represented as resources
within the medium.
Accessibility is achieved by building Linked Data
around HATEOAS principles. Agents can access re-
sources and read information from them by HTTP
GET requests. All information needed to interact
with a resource is provided by the server that man-
ages the resource. Furthermore, Linked Data defines
query interfaces as a common interaction method with
linked data graphs. By employing graph query en-
gines like SPARQL
3
, agents can identify relevant re-
sources as a result of the queries. Moreover, by fol-
lowing links between related resources, agents may
explore Linked Data graphs autonomously. It is not
required to host the medium being hosted on a sin-
gle physical server instance to ensure accessibility.
In fact, Linked Data principles state that resolution
of URIs should happen transparent, and agents do
not need to make assumptions where the actual data
is hosted. This allows the medium to be hosted on
distributed servers. For queries, SPARQL supports
the integration of data from different distributed end-
points via federated queries using the SERVICE key-
word.
4
Observability: ”Existence” of an effect is manifested
in Linked Data by existence of a respective triple pat-
tern in the Linked Data graph. By this, the existence
of an effect as precondition for an action can be ver-
ified by matching expected triple patterns against the
3
W3C SPARQL 1.1 Query Language Recommendation
(Apr. 2021): https://www.w3.org/TR/sparql11-query/
4
SPARQL Federated Queries: (Apr.2021): https://www.
w3.org/TR/sparql11-federated-query/
Linked Data graph via SPARQL queries. The state-
ments encoded by triples are moreover semantically
interpretable by software agents, as commonly estab-
lished for Linked Data graphs.
Quantities can be modelled in Linked Data graphs
either by using respective literal nodes that express
a quantity in terms of a fitting datatype directly, or
by the number of triples rendered to a respective re-
source.
Consistency is achieved by the notion of state and
representation of resources in a Linked Data system as
outlined in Sections 3.1 and 3.2. Access to resources,
the represented concept, and modes of interaction are
managed by the Linked Data server and provided to
clients following HATEOAS principles. By the com-
munication between clients and server being stateless
(by following REST and HATEOAS principles), the
state of the resource as communicated by the server
towards clients is independent of particular clients,
and by this, consistent among all clients.
Malleability is achieved by write-capabilites of read-
write Linked Data. On resource-level, agents may
change the state of a resource by PUT / POST /
DELETE requests. On graph level, linked data pro-
vides possibilities to change elements in the medium
using SPARQL UPDATE requests with INSERT and
DELETE statements. The WHERE body of these
states moreover allows to take into account pre-
conditions that need to be fulfilled when performing
the update.
Stability during updates is achieved by unambigu-
ous identification of relevant resources via IRIs. By
default, operations on resources do not have side-
effects on other resources, and by this, will not inflict
undesired changes to resources other than those that
the action was performed on. On RDF graph level,
stability during write operations is ensured by that
adding triple statements to a resource does not inter-
fere with triples already present: by adding triples,
statements about a resource may only become more
specific, but never eliminate statements that were
present before new triples were added.
Scope can be expressed in read-write Linked Data
either by specific triple statements on resources by
which agents can filter for specific resources, or by
using mechanics of Linked Data datasets and named
graphs.
5
Different scopes, i.e. named graphs, are
then accessed by agents for example by using FROM
and FROM NAMED clauses in the respective SPARQL
queries.
By finding all requirements R1 – R6 fulfilled by
and materialized via concepts of read-write Linked
Data systems, we derive that read-write Linked
5
https://www.w3.org/TR/rdf-sparql-query/#rdfDataset
Linked Data as Stigmergic Medium for Decentralized Coordination
351
Data is without limitations a suitable generic digital
medium for stigmergy-based coordination.
5 APPLICATION EXAMPLE
Following, we show how to employ a read-write
Linked Data layer as stigmergic medium in Agent
Space by an application example from the domain of
digital manufacturing. The example is loosely based
on the use case presented in (Schraudner and Charpe-
nay, 2020): A (simulated) factory receives orders for
simple IoT modules on a ”batch size 1” production
line as commonly envisioned in Industry 4.0 (Lasi
et al., 2014; Mrugalska and Wyrwicka, 2017). Once
an order is received, it is carried out by employing ma-
chines which provide the capabilities to perform man-
ufacturing steps necessary for particular steps during
the production process, e.g. providing plastic casts for
casings, soldering electric circuits, or fixing the final
model (see Figure 1).
Figure 1: Process of IoT module production used as exam-
ple.
Orders are executed by AI agents. The need for
coordination arises as machines are shared between
simultaneously executed orders.
The purpose of the presented coordination algo-
rithm is to find a suitable distribution of machines be-
tween agents working on different orders, with the
goal to complete each order in the shortest possible
time.
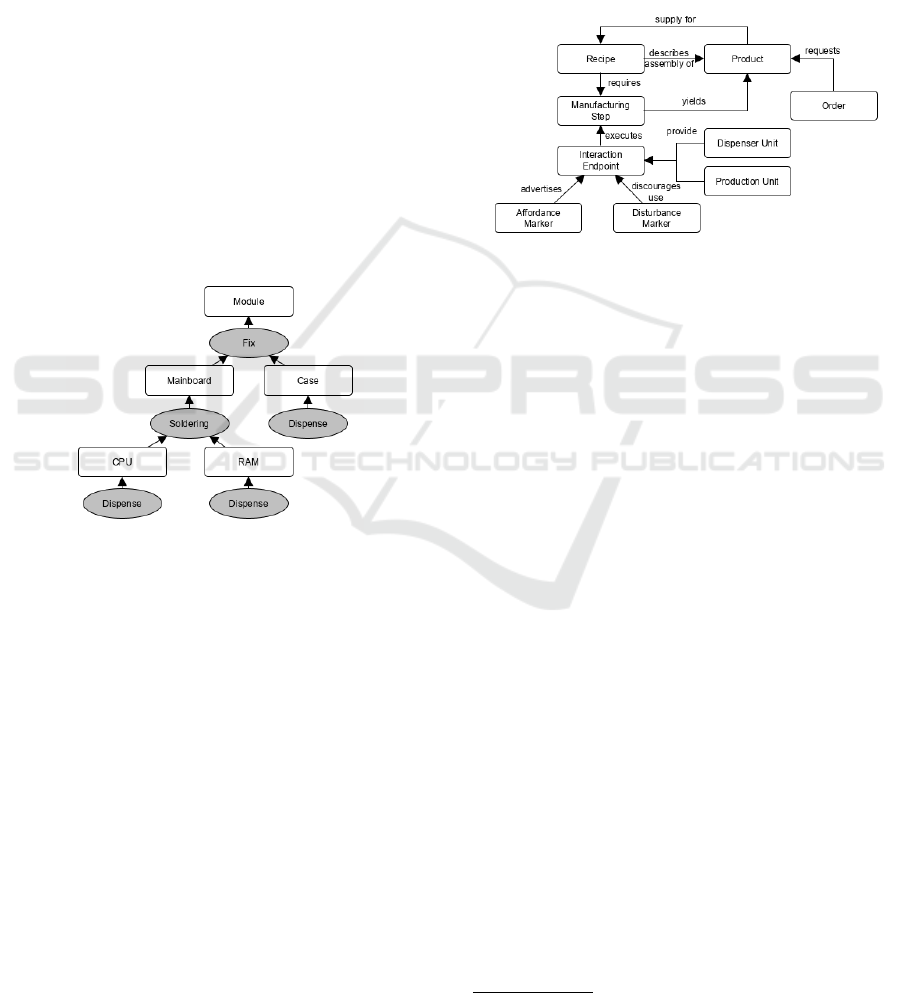
5.1 Domain Model
The domain model for our application example is
shown in Figure 2: An order requests a certain prod-
uct to be produced. How a product can be assem-
bled is described in recipes. These recipes spec-
ify what other products are needed as prerequisite,
and which manufacturing step is necessary to assem-
ble supply products to a higher level product. Man-
ufacturing steps are provided by units on the shop
floor, and can be executed by network interaction end-
points. As common in models for automated produc-
tion, and also assumed in (Charpenay et al., 2020)
and (Schraudner and Charpenay, 2020), we assume
production units to have callable network endpoints
by which their particular production step can be exe-
cuted. Affordance- and disturbance markers are used
to encourage or discourage the use of a certain inter-
action endpoint.
Figure 2: Domain model of the chosen application example.
Listing 1: Example of a production recipe using schema and
steps vocabularies.
1 re ci pe s : mai n - modul e rd f : ty pe s ch em a : Ho wT o ;
2 sc he ma : abo ut ma in bo ar d : p ro du ct ;
3 sc he ma : ste p st eps : so ld er ;
4 sc he ma : sup pl y [
5 rdf: typ e schema : Ho wT oSu pp ly ;
6 sche ma : ite m cpu: pr od uc t ] ,
7 [ rd f : type s chema : HowTo Su pp ly ;
8 sche ma : ite m ram: pr od uc t ] .
A recipe specifies the produced artifact by
the schema:about predicate, the required supply
from which the product is created (indicated the
schema:supply predicate), and the production step
that needs to be performed to combine the specified
supplies to the resulting product via the schema:step
predicate (see Listing 1). schema: denotes the
namespace of the schema.org ontology
6
. We assume
a set of supply materials to be provided to the factory
without the need for specific production. These sup-
ply materials will be provided by dispenser units, and
do not require any additional supplies.
Products are described in terms of an RDF class,
e.g. (<#product>, rdf:type, cpu:product).
Dispenser and production units spec-
ify their (callable) execution endpoint as
td:InteractionPattern in a set of triples that is
referenced via td:providesInteractionPattern.
The Interaction Pattern specifies the step carried out
by the respective unit (see also Listing 2). Dispensers
6
https://schema.org/
ICSOFT 2021 - 16th International Conference on Software Technologies
352

refer to the class of dispensed products via a triple
(<#unit>, schema:yield, <#productClass>),
with <#productClass> referring to the RDF class of
the produced product. Dispenser units can dispense
more than one class of products. Production units
do not specify particular products that are produced
at the unit to allow for various products that are
produced with the same step to be produced at the
same machine. Instead, they provide information
about the type of provided production step via a
triple (<#unit>, schema:step, steps:<type>).
An example of a simple soldering unit is shown in
Listing 2.
Interaction Patterns on machines describe par-
ticular actions that agents may perform by to trig-
ger the execution of the respective production step
on the physical machine. This is done by resolv-
ing the URI that is provided by the respective re-
source, and that is identified by the property path
td:isAccessibleThrough/td:href, with td: de-
noting the namespace of the Web Thing Description
ontology
7
.
Listing 2: Example of a simple description of a worksta-
tion that performs a soldering step. The soldering action is
executed by calling the respective referenced URI.
1 s o l : s t a t i o n −1 a t d : Thing ;
2 t d : thi ngNa me ” S o l d e r i n g S t a t i o n 1 ” ˆ ˆ x s d :
s t r i n g ;
3 t d : p r o v i d e s I n t e r a c t i o n P a t t e r n s o l : s o l d e r i n g .
4
5 s o l : s o l d e r i n g a t d : I n t e r a c t i o n P a t t e r n ;
6 t d : i nt e r a c t i o nN a m e ” s o l d e r ” ˆ ˆ xsd : s t r i n g ;
7 schema : s t e p s t e p s : s o l d e r ;
8 t d : i s A c c es s i b l e T h r o u g h [
9 t d : h r e f <h t t p : / / 1 0 . 2 . 1 0 0 . 1 7 / s o l d e r />
10 ] .
5.1.1 Affordances and Disturbances
Listing 3: Example of an affordance marker resource that
advertises a steps:soldering interaction as relevant for
the current order.
1 < ur n : uu id : a52 6 >
2 a s ti gm ergy : ma rk er lef ;
3 s ti gm er gy : ma rked so l : so lderi ng ;
4 s ti gm er gy : scope order : mo dule ;
5 sche ma : su pply cp u : pro duct ,
6 ram: pr od uc t ;
7 sche ma : yield mm : pro du ct .
Affordances will advertise
td:InteractionPattern resources as callable
endpoint to some executing agent. Affordances are
markers that are left on a td:InteractionPattern.
Listing 3 shows an example of such a marker:
The marker gives information about which Interac-
tion Pattern it marked (via stigmergy:marked), for
7
https://www.w3.org/2019/wot/td
which order the respective pattern needs to be exe-
cuted (via stigmergy:scope), whether or not the re-
spective step needs particular supplies to be present
to be executed (schema:supply), and finally, which
product will be the result of calling the respective In-
teractionPattern resource (schema:yield). A marker
can link to one or more interaction patterns. If more
than one interaction pattern is marked, it is up to an
executing agent to choose which of the endpoints to
call.
Disturbance markers will discourage agents from
visiting a marked resource. If an affordance marker
links to several resource endpoints, an executing
agent will decide for an endpoint that is the least in-
fluenced by disturbance markers. The complete algo-
rithm will be detailed out in Section 6.
6 EXAMPLE ALGORITHM
We now show how to realize a stigmergy-based co-
ordination algorithm based on the definition of the
Linked Data layer from the previous section.
The algorithm to execute a coordinated produc-
tion process for multiple orders is implemented in two
steps by two classes of agents. We divide agents into
marker agents and builder agents. Marker agents tra-
verse graphs in the agent space and generate produc-
tion markers as affordances on resources in the Arti-
fact space as shown in Listing 3. Builder agents are
attracted towards the respective endpoints by the af-
fordances left by the marker agents and execute those
production endpoints that were marked in the scope
of the current order, given that the production require-
ments (supplies) are met.
6.1 Marker Agents
The goal of a marker agent to identify all suitable pro-
duction units that will be involved in the process of
producing a particular order. For this, marker agents
will traverse recipe resources and leave markers on
resources as follows:
The agent maintains a list unvisited of nodes it
would like to visit, but has not yet.
1. Check for order resources that have not yet been
handled, i.e., do not carry a mark. Follow the
link via the schema:orderedItem property to the
resource that represents the class of the ordered
product and add it to unvisited. Mark the order
as handled.
2. From a resource r in unvisited, find a respec-
tive recipe blueprint b that contains a triple (b,
Linked Data as Stigmergic Medium for Decentralized Coordination
353

schema:about, r), i.e., the recipe for the respec-
tive product.
3. Check for a schema:step link, and visit all in-
teraction patterns i matching the schema:step;
if the step is steps:dispense, find the respec-
tive interaction patterns of dispenser units that
schema:yield r .
4. Leave a mark on each visited i (for both produc-
tion and dispenser, cf. Listing 3).
5. For each resource s in schema:supplies of b,
add s to unvisited. If no schema:supply is
specified, or resource points to an empty set
(rdf:nil), do nothing. Remove the current re-
source r from unvisited.
6. If unvisited is empty, terminate; else, go to 2.
The mark which is left by the agent in Step 4.
follows the structure of the example shown in List-
ing 3. It includes information about the order in
the scope of which it was placed, and will moreover
specify the required supplies s for this step. Mark-
ers may be scoped by order, using a triple (marker,
stig:scope, order) on the marker resource (Narrow-
cast), or unscoped and by this visible for every other
agent (Broadcast). Following the given algorithm, a
marker agent is solely driven by the structure of the
knowledge graph that is formed between product and
blueprint descriptions. Each subsequent step is solely
decided by the state of the currently visited resource.
Its behavior can by this be classified as a sematectonic
stigmergic agent.
6.2 Builder Agents
Builder agents are attracted to markers left by marker
agents and call the respective InteractionPattern
endpoints. A Builder agent for this proceeds in the
following manner:
1. Scan for all markers m left by marker agents. If
the builder agent is bound to a specific scope (i.e.
fulfilling a particular order), it will only follow
markers in its scope (i.e., with a matching (m,
stig:scope, order) triple present.
2. For each m, the checks, e.g. via a fitting SPARQL
query, if for each supply s specified by the marker
via (m, schema:supply, s), there exists a product
p that is a product of class s, as encoded by a triple
(p, rdf:type, s).
3. For each m for which supplies are fulfilled,
the visit the InteractionPattern resource i that is
marked via (m, stig:marked, i) and that carries
the least amount of disturbance markers. Ex-
ecute the action endpoint that is identified via
td:isAccessibleThrough/td:href.
4. Leave a disturbance marker on the interaction pat-
tern resource, and removes the affordance marker.
By following a marker trace left by other agents,
we employ a marker-based stigmergy approach. The
supplies specified on the marker, in combination with
a reference to callable resources for execution of the
respective interaction step, encode a condition-action-
rule that the agent follows.
6.3 Correctness of the Algorithm
An order specificies the expected result of one in-
stance of the algorithm, namely the specific product
that is to be produced in the end. By marker agents
starting from the expected goal (the ordered product),
and following links backwards through the needed
supplies, it is ensured that over the total production
process, all needed supplies will be available even-
tually. Marker agents do not need to keep memory
of the goal they are following, but are guided en-
tirely by the structure of the Linked Data medium. It
can be easily shown that the marker agent’s algorithm
will terminate as soon as all dispensable supplies (leaf
nodes in the graph in Figure 1) are provided with a
marker. The builder agent’s algorithm will terminate
when the last marker is consumed. Builder agents are
not restricted to follow only markers of a specific or-
der. Consuming a marker and triggering the respec-
tive action will always result in a product that was
previously found to be a requirement by some marker
agent. Eventually, by builder agents executing end-
points for products with rising complexity as supplies
are more and more met, the ordered product will be
produced.
If several orders are executed in parallel, produc-
tion units (and dispensers) will simply receive several
independent markers. By having separate markers per
order, and having builder agents removing the marker
they followed after executing the production step, it is
ensured that for every order, every production step is
executed exactly once. The concept may be extended
for products to require more than one instance of a
supply product. In this case, a marker agent would
leave a marker per required instance of a supply.
The opportunity for coordination arises in Step
3. of the builder agent algorithm: For every recipe,
markers are left on every machine that is capable of
carrying out the needed production step. When fol-
lowing the marker trace, builder agents have a choice
which of the marked machines they actually execute.
ICSOFT 2021 - 16th International Conference on Software Technologies
354

The decision for which machine to call for to exe-
cute the step is based on the number of disturbance
markers left on the resource: The more agents visit,
means, the busier the machine already is with execut-
ing orders, the more disturbance markers are left on
the machine, and agents will be more likely to divert
to other machines to complete their order.
The algorithm at this point ignores transport of
products on the shop floor. A more sophisticated
heuristic may take into account also transport times
between machines between the different steps.
6.4 Implementation
We implemented the example using the Unity 3D
game engine to simulate the factory, a Fuseki triple
store to host the read-write Linked Data medium, and
the AJAN agent platform
8, 9
(Antakli et al., 2019) to
implement the behaviors of both marker and builder
agents. All related resources will be published on
GitHub:
https://github.com/BMBF-MOSAIK/
stigmergy-demo
7 DISCUSSION
In the following, we analyse the use of Linked Data
as stigmergic medium based on findings from the al-
gorithm w.r.t. benefits of stigmergic systems (see also
(Heylighen, 2015, pp.13-14)):
Agents do not plan or anticipate, but only follow
links between resources in the Linked Data medium.
The condition-action-rules that determine which re-
sources to visit are generic. Agents do not need
to make per-resource decision whether following the
rule is beneficial for the goal, or not. The ”goal” (pro-
duction of a specific order) is, in particular, not known
to an agent, and reaching any goal is no condition for
termination of the algorithm.
Memory-less agents are sufficient by storing all
relevant information that arises during execution in
terms of resources in the medium. Same goes for
communication between agents, which is eliminated
by limiting interaction to following markers left by
other agents. Agents are moreover not aware of each
other, as their interaction is limited entirely to the
Linked Data medium. This also implies that agents
do not need to be simultaneously present.
The correct sequence of steps arises naturally by
including information about required supplies, both
8
https://github.com/aantakli/AJAN-service
9
https://github.com/aantakli/AJAN-editor
when a marker agent decides which recipe resources
to visit next, and when a builder agent decides which
marked production resource to visit next. There is no
requirement to explicitly model (and by this, impose)
sequences during execution of a particular produc-
tion in a form like ”after you have successfully vis-
ited this resource, continue with that specific resource
over there”. Instead, sequence arises implicitly from
the condition-action rules encoded in the Linked Data
medium.
Non-necessity for commitment is achieved by hav-
ing no explicit assignment of tasks to agents, but have
agents decide which resource to visit, and how to in-
teract with it (e.g., perform their competent action),
solely on the state of resources in the medium. Any
agent can pick up any task at any point in time accord-
ing to the agents’ competence.
Finally, as it is obvious from the algorithms of
both marker and builder agents, that there is no cen-
tralized coordination or control authority that agents
need to consult, or by which they are controlled.
Coordination arises solely from resource states and
markers left in the medium, as already discussed in
Section 6.3.
8 CONCLUSION AND FUTURE
WORK
In this paper, we have thoroughly analyzed read-write
Linked Data as a digital medium for stigmergy-based
coordination mechanisms. We have based this anal-
ysis on common general characteristics of stigmergic
systems in literature. By identifying direct correspon-
dences between these and central features of Linked
Data systems, we finally achieved to show that read-
write Linked Data provides a perfect digital medium
for stigmergy-based coordination algorithms. Finally,
we provided an example of how to employ these find-
ings in a coordination algorithm for customized digi-
tal production.
Currently, the presented algorithm is to be consid-
ered a basic conceptual example to show that decen-
tralized stigmergy-based coordination works. It is not
yet intended to show improved efficiency and scala-
bility over existing approaches. We do plan to fur-
ther improve and evaluate the algorithm with focus
on these aspects in future work. We moreover plan
to demonstrate the applicability of Linked Data as a
stigmergic medium by more complex examples from
different domains.
For actual application in a production setting, the
algorithm as presented omits elements like location
of products and production units on the shop floor,
Linked Data as Stigmergic Medium for Decentralized Coordination
355

and by this, necessary steps and tools for transport
of products. We are working on implementing these
concepts in an extended version of the algorithm.
ACKNOWLEDGEMENTS
This work has been supported by the German Federal
Ministry for Education and Research (BMBF) as part
of the MOSAIK project (grant no. 01IS18070-C).
REFERENCES
Alfeo, A. L., Cimino, M. G., Egidi, S., Lepri, B., and
Vaglini, G. (2018). A Stigmergy-Based Analysis of
City Hotspots to Discover Trends and Anomalies in
Urban Transportation Usage. IEEE Transactions on
Intelligent Transportation Systems, 19(7):2258–2267.
Antakli, A., Spieldenner, T., K
¨
oster, M., Groß, J., Her-
rmann, E., Rubinstein, D., Spieldenner, D., and Zin-
nikus, I. (2019). Optimized coordination and simula-
tion for industrial human robot collaborations. In In-
ternational Conference on Web Information Systems
and Technologies, pages 44–68. Springer.
Berners-Lee, T., Hendler, J., Lassila, O., et al. (2001). The
semantic web. Scientific american, 284(5):28–37.
Bizer, C., Heath, T., Idehen, K., and Berners-Lee, T. (2008).
Linked data on the web (ldow2008). In Proceedings of
the 17th international conference on World Wide Web,
pages 1265–1266.
Bonabeau, E., Henaux, F., Gu
´
erin, S., Snyers, D., Kuntz, P.,
and Theraulaz, G. (1998). Routing in telecommunica-
tions networks with ant-like agents. Lecture Notes in
Computer Science (including subseries Lecture Notes
in Artificial Intelligence and Lecture Notes in Bioin-
formatics), 1437(1):60–71.
Charpenay, V., Schraudner, D., Seidelmann, T., Spielden-
ner, T., Weise, J., Schubotz, R., Mostaghim, S., and
Harth, A. (2020). Mosaik: A formal model for self-
organizing manufacturing systems. IEEE Pervasive
Computing.
Chiong, R. (2009). Nature-inspired algorithms for optimi-
sation, volume 193. Springer.
Chopra, S., Notarstefano, G., Rice, M., and Egerstedt,
M. (2017). A Distributed Version of the Hungarian
Method for Multirobot Assignment. IEEE Transac-
tions on Robotics, 33(4):932–947.
Ciancarini, P., Gorrieri, R., and Zavattaro, G. (1997). To-
wards a calculus for generative communication. In
Formal Methods for Open Object-Based Distributed
Systems, pages 283–297. Springer.
Cicirello, V. A. and Smith, S. F. (2004). Wasp-like agents
for distributed factory coordination. Autonomous
Agents and Multi-Agent Systems, 8(3):237–266.
De Nicola, R., Di Stefano, L., and Inverso, O. (2020).
Multi-agent systems with virtual stigmergy. Science
of Computer Programming, 187:102345.
Dipple, A., Raymond, K., and Docherty, M. (2013). Stig-
mergy within Web Modelling Languages : Positive
Feedback Mechanisms. eprints.qut.edu.au.
Dipple, A., Raymond, K., and Docherty, M. (2014). Gen-
eral Theory of Stigmergy: Modelling Stigma Seman-
tics. Elsevier.
Dipple, A. C. (2011). Standing on the shoulders of ants:
Stigmergy in the web. In Proceedings of the 20th
international conference companion on World wide
web, pages 355–360.
Dorigo, M. and Blum, C. (2005). Ant colony optimization
theory: A survey. Information Sciences.
Fielding, R. T. and Taylor, R. N. (2000). Architectural
styles and the design of network-based software ar-
chitectures, volume 7. University of California, Irvine
Irvine.
Gelernter, D. (1985). Generative communication in linda.
ACM Transactions on Programming Languages and
Systems (TOPLAS), 7(1):80–112.
Heylighen, F. (2006). Mediator evolution: a general sce-
nario for the origin of dynamical hierarchies. World-
views, Science and Us.(Singapore: World Scientific),
44:45–48.
Heylighen, F. (2015). Stigmergy as a universal coordina-
tion mechanism: components, varieties and applica-
tions. Human Stigmergy: Theoretical Developments
and New Applications; Springer: New York, NY, USA.
Jevti
´
c, A., Gutierrez,
´
A., Andina, D., and Jamshidi, M.
(2012). Distributed bees algorithm for task allocation
in swarm of robots. IEEE Systems Journal, 6(2):296–
304.
Kanamori, R., Takahashi, J., and Ito, T. (2014). Evalu-
ation of traffic management strategies with anticipa-
tory stigmergy. Journal of Information Processing,
22(2):228–234.
Koro
ˇ
sec, P.,
ˇ
Silc, J., and Filipi
ˇ
c, B. (2012). The differential
ant-stigmergy algorithm. Information Sciences.
Krieger, M. J., Billeter, J. B., and Keller, L. (2000). Ant-like
task allocation and recruitment in cooperative robots.
Nature, 406(6799):992–995.
Lasi, H., Fettke, P., Kemper, H.-G., Feld, T., and Hoffmann,
M. (2014). Industry 4.0. Business & information sys-
tems engineering, 6(4):239–242.
Lassila, O., Swick, R. R., et al. (1998). Resource description
framework (rdf) model and syntax specification.
Lucchi, R., Millot, M., and Elfers, C. (2008). Resource Ori-
ented Architecture and REST. Assessment of impact
and advantages on INSPIRE, Ispra: European Com-
munities.
Matari
´
c, M. J., Sukhatme, G. S., and Østergaard, E. H.
(2003). Multi-robot task allocation in uncertain en-
vironments. Autonomous Robots, 14(2-3):255–263.
Mayer, S., Verborgh, R., Kovatsch, M., and Mattern, F.
(2016). Smart configuration of smart environments.
IEEE Transactions on Automation Science and Engi-
neering, 13(3):1247–1255.
Mrugalska, B. and Wyrwicka, M. K. (2017). Towards lean
production in industry 4.0. Procedia engineering,
182:466–473.
ICSOFT 2021 - 16th International Conference on Software Technologies
356

Privat, G. (2012). Phenotropic and stigmergic webs: The
new reach of networks. Universal Access in the Infor-
mation Society, 11(3):323–335.
Ricci, A., Omicini, A., Viroli, M., Gardelli, L., and Oliva,
E. (2007). Cognitive stigmergy: Towards a framework
based on agents and artifacts. Lecture Notes in Com-
puter Science (including subseries Lecture Notes in
Artificial Intelligence and Lecture Notes in Bioinfor-
matics), 4389 LNAI:124–140.
Schraudner, D. and Charpenay, V. (2020). An HTTP/RDF-
Based Agent Infrastructure for Manufacturing Using
Stigmergy. (01):197–202.
Tzanetos, A., Fister Jr, I., and Dounias, G. (2020). A com-
prehensive database of nature-inspired algorithms.
Data in Brief, 31:105792.
Valckenaers, P., Hadeli, Germain, B. S., Verstraete, P.,
and Van Brussel, H. (2007). MAS coordination and
control based on stigmergy. Computers in Industry,
58(7):621–629.
Verborgh, R., Steiner, T., Deursen, D. V., d. Walle, R. V.,
and Vall
´
es, J. G. (2011). Efficient runtime service dis-
covery and consumption with hyperlinked restdesc. In
2011 7th International Conference on Next Genera-
tion Web Services Practices, pages 373–379.
Yu, X. and Cheng, T. (2020). Research on a Stigmergy-
driven & MAS-based Method of Modeling Intelligent
System. pages 1042–1047.
Linked Data as Stigmergic Medium for Decentralized Coordination
357
