
A Genetic Algorithm for HMI Test Infrastructure Fine Tuning
Lukas Rosenbauer
1
, Anthony Stein
2
and J
¨
org H
¨
ahner
3
1
BSH Hausger
¨
ate GmbH, Im Gewerbepark B35, Regensburg, Germany
2
Artificial Intelligence in Agricultural Engineering, University of Hohenheim, Garbenstr. 9, Stuttgart, Germany
3
Organic Computing Group, University of Augsburg, Am Technologiezentrum 8, Augsburg, Germany
Keywords:
Automatization, Testing, Genetic Algorithm, Computer Vision.
Abstract:
Human machine interfaces (HMI) have become a part of our daily lives. They are an essential part of a variety
of products ranging from computers over smart phones to home appliances. Customer’s requirements for
HMIs are rising and so does the complexity of the devices. Several years ago, many products had a rather
simple HMI such as mere buttons. Nowadays lots of devices have screens that display complex text messages
and a variety of objects such as icons. This leads to new challenges in testing, the goal of which it is to ensure
quality and to find errors. We combine a genetic algorithm with computer vision techniques in order to solve
two testing use cases located in the automated verification of displays. Our method has a low runtime and can
be used on low budget equipment such as Raspberry Pi which reduces the operational cost in practice.
1 INTRODUCTION
HMIs enable customers to interact with a product.
They can be rather simple components such as rotary
knobs or sliders. Expensive devices can offer more
complicated HMIs such as voice control, gesture con-
trol, or touch displays which offer even more ways to
interact with a device.
These advances have led to new challenges in the
development of the aforementioned solutions. An es-
sential part of development is the verification of the
product. The testing of HMIs has undergone se-
rious investigation from various perspectives. Ma-
teo Navarro et al. (2010) examine HMI testing from a
software engineering point of view and propose an ar-
chitecture for graphical user interface (GUI) testing.
Duan et al. (2010) developed a model-based approach
to achieve a high code coverage and to keep the de-
velopment cost in bounds. Howe et al. (1997) exploit
planning techniques in order to generate test cases for
GUIs using evolutionary methods. A genetic algo-
rithm was used by Rauf et al. (2011) to improve the
path coverage of GUIs.
The aforementioned approaches deal with the
question: How should HMI testing be done? With the
move from manual testing to automated testing, an-
other task is to provide the right tools for testers to im-
plement tests. Inadequate test infrastructure is respon-
sible for major economical losses (Hierons, 2005).
Thus it is a profitable goal to provide testers with the
right testing equipment.
Within this work, we combine an evolutionary al-
gorithm with more traditional computer vision algo-
rithms to solve two use cases for the visual validation
of GUIs. Both deal with the identification of GUI ele-
ments. The first deals with the verification of screens
from simulations or the framebuffer based on the de-
signer’s specification. The latter does not require the
entire HMI as only the buffer and the CPU are neces-
sary. The second one is a part of the electronic com-
ponent test which has the goal to verify the software’s
behaviour combined with the hardware of the HMI.
There we try to recognize various icons.
Both problems could be solved by using artificial
neural networks. However, these have the downside
that the number of possible classes must be known
during the design time of the network (G
´
eron, 2017).
Usually testing is started early (Olan, 2003) and re-
quirements change during the lifetime of a project
(Nurmuliani et al., 2004) which might lead to frequent
redesigns and retrainings of the specified neural net-
work. Another downside is that usually an Nvidia
GPU must be acquired in order to have reasonable
runtimes (G
´
eron, 2017).
We deemed this as unfavorable and thus took a
look at more traditional computer vision methods
such as template matching or feature detectors that
do not have these downsides (Szeliski, 2010). On the
Rosenbauer, L., Stein, A. and Hähner, J.
A Genetic Algorithm for HMI Test Infrastructure Fine Tuning.
DOI: 10.5220/0010512803670374
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 367-374
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
367

other hand, they require the correct calibration of for
example edge detection thresholds. In order to avoid
calibrating these parameters manually, we apply a ge-
netic algorithm (GA) to do this automatically.
Further, we provide a proof of concept that a GA
can be used to automatically fine-tune computer vi-
sion methods for HMI testing. In our experiments
we show that our calibrated recognition methods are
not only able to correctly identify GUI elements, but
that our calibration approach also needs a compara-
bly small amount of data. Furthermore, our experi-
ments reveal that the designed methods have a rather
low runtime which enables us to test more screens and
the designed approach can also be used on low-budget
boards such as Raspberry Pi.
In Section 2 we discuss related work. We provide
a more detailed description of the use cases in Sec-
tion 3. Afterwards, several computer vision methods
are introduced that we are going to calibrate (Section
4). This is followed by a description of our fitness
function and GA (Section 5). In Section 6 we per-
form a series of experiments that verify our approach.
We close the paper with a conclusion (Section 7).
2 RELATED WORK
HMI testing got into the focus of several compa-
nies. For example Froglogic’s Squish framework or
Bosch’s Graphics Test System offer various function-
alities for GUI verification. Some of these software
products enable test engineers to use trained machine
learning models such as neural networks for optical
character recognition (Froglogic, 2020). Others re-
quire the manual calibration of algorithmic parts for
the recognition of GUI elements, for example the test
system of the company Zeenyx (2020). Some of these
visual testing frameworks have found their way into
various companies (Al
´
egroth et al., 2016).
From a scientific point of view, the visual verifi-
cation of GUI elements such as icons is an applica-
tion of computer vision (CV). This problem is known
as object recognition (Szeliski, 2010). This can be
achieved by using artificial neural networks (G
´
eron,
2017). There are also possible solutions outside of
machine learning such as feature detectors (Lowe,
1999). It is worth mentioning that these CV method-
ologies also require a precise calibration of the un-
derlying parameters in order to work properly. Fur-
ther, the quality of the image recognition algorithms
has been detected as key issue in visual testing and
several enterprises encountered issues with the frame-
works available (Al
´
egroth et al., 2013).
GAs have been used for a variety of calibration
tasks such as spectroscopy (Attia et al., 2017) and en-
ergy models (Lara et al., 2017). We think that these
positive results indicate that a GA might also be use-
ful to fine-tune CV methods for HMI verification. It
is also worth mentioning that there a variety of alter-
native evolutionary techniques as documented in the
survey of Stegherr et al. (2020). However, due to the
aforementioned successful usages of GAs we decided
to start with this class of metaheuristics.
3 PROBLEM DESCRIPTION
Within this section, we introduce our two use cases.
We provide several example images to ease under-
standing and show how they can be solved using pure
CV.
3.1 Verification on a Pixellevel
Before the images of an application are displayed,
they are usually held in a framebuffer. When it is
time to be shown on the display then the currently
displayed image will be deleted. Afterwards, the next
screen is loaded from the buffer to the display. During
this process errors might occur as pixels are not prop-
erly loaded, old pixels are not deleted, or the image al-
ready contains errors in the buffer. We displayed such
a case that we encountered in a company in Figure 1
where the word “Wecker” contains a pixel error (some
pixels of characters are black but should be white).
In order to detect pixel errors, template match-
ing (TM) can be applied Szeliski (2010). TM uses
an example image called template and compares it to
the image of an application. If both images are close
enough in terms of a similarity measure or distance,
then it is regarded as a match. TM can also be used
to validate parts of the application’s output. In our
example we discovered the error by rendering an im-
age containing the word “Wecker” and sampling the
screen.
There are several ways to acquire an exemplary
image that can be used as a template. One possibil-
ity is to use the designer’s specification of individual
screens, another one is to use a test oracle (Ammann
and Offutt, 2016) which proposes the correct screen
based on the current GUI state. Due to technical lim-
itations there might still be some differences between
the template and the application. These minor differ-
ences can be tolerated and the screen can be seen as
valid. For example, the designers might define the
user interface’s colors in a format that uses one byte
per color channel (888 format) and the HMI uses a
686 format (6 bits for red, 8 bits for green, 6 bits for
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
368

Figure 1: Example of a pixel error of an user interface. The
word “Wecker” contains pixel errors as some of the white
pixels are missing.
Figure 2: Example of a possible test environment for the
component test of an HMI.
blue) to save memory. Such memory saving color
formats are widespread in embedded systems (Mar-
wedel, 2010) and a transformation from the 888 for-
mat to the 686 format is lossy.
TM requires test engineers to set tolerances or
scale levels for the template. A too high tolerance
leads to failures that go undetected in automated tests.
An overly low tolerance can lead to false negative
tests. The tolerances may differ from region to region.
Thus the goal of this use case is to automatically set
the correct thresholds for TM.
3.2 Component Test
Component testing is a branch of verification that lim-
its its scope to a certain part of the system. An HMI
can consist out of hardware and software. Both must
interact properly in order to satisfy customers. For
example, if a user selects a program on a dishwasher,
corresponding options should be displayed.
A possible approach for a corresponding test envi-
ronment is displayed in Figure 2. It consists out of a
camera to make images of the display, the HMI which
is to be tested, and a communication interface which
can be used to manipulate its state. We packed these
components in a black box in order to avoid side ef-
fects due to illumination. It is worth mentioning that
we are not the first to evaluate a hardware using a
camera. For example, Ramler and Ziebermayr (2017)
used a camera-based testbed to verify the behaviour
of a mechatronic system.
Images taken via camera contain a certain amount
of noise due to the environment or the camera itself.
Further, the HMI may not be parallel to the lens. This
leads to slightly rotated GUI elements. A CV ap-
proach to tackle these problems are feature detectors
such as SIFT (Lowe, 1999) which can be used to rec-
ognize rotated objects. Furthermore, a raw TM is also
not sufficient since GUI elements will most likely not
have the same scale as the template. In this use case
we will fine-tune a CV method which combines fea-
ture detectors and TM.
4 COMPUTER VISION
ALGORITHMS
Here we introduce two basic CV algorithms that are
suitable for our two use cases, but they require the
fine-tuning of certain parameters which we will do
later on using a GA.
The first one is a simple template matcher de-
scribed in Algorithm 1. It samples the given image
using a sliding window with a step size of one pixel. If
the patch is similar enough then it returns true. There
can be several thresholds depending on the region of
interest (ROI) of the screen. In our later experiments
we will use the cosine similarity (Singhal, 2001).
Algorithm 1: Template matcher based on Szeliski (2010).
input : Image i, Template T
1 while Sample S left do
2 if similarity(S, T) > Threshold then
3 return True;
4 end
5 return False;
We further examine a feature-based approach
which is based on oriented fast and rotated brief
(ORB) (Rublee et al., 2011) and TM. We chose
ORB over SIFT and SURF as it is a non-patented
method which enables commercial use without li-
censing costs. Further, ORB is available in the well-
known open source library OpenCV (OpenCV.org,
2020).
We once more sample the given image. ORB com-
putes image features that are represented as bit vec-
tors which can be compared to each other using the
Hamming similarity (Rublee et al., 2011). For every
patch we calculate the k best matches between the fea-
ture of the object to search for and the image to ex-
amine. Further, the average µ of these similarities is
computed. Additionally we scale the template to var-
A Genetic Algorithm for HMI Test Infrastructure Fine Tuning
369

ious sizes, compare it with the patch, and return the
highest cosine similarity γ. If the following condition
holds we interpret that as a “found”:
β · µ + (1 − β) · γ > threshold (1)
where β is a real number between zero and one. It
controls the influence of TM and ORB on the classi-
fication result.
We summarized this process for one sampled
patch in Algorithm 2. Later on our GA will learn the
number of scale levels, the scale increment, β, k, and
the threshold. These can once more vary from ROI to
ROI.
Algorithm 2: Object recognition with TM and ORB.
input : Patch p, Template T
1 t feat = ORB features(T)
2 p feat = ORB feature(p)
3 k best = get k best matches(p feat, t feat)
4 µ = mean(k best similarities)
5 tm similarities = { }
6 for i in {-scale levels,...,scale levels} do
7 // scale to 1 + i * scale inc times its size
8 scaled temp = scale(T, 1 + i * scale inc)
9 // compute cosine similarity
10 sim = cos sim(p, scaled temp)
11 append sim to tm
similarities
12 end
13 γ = max(tm similarities)
14 if β · µ + (1 − β) · γ > Threshold then
15 return True;
16 return False;
5 EVOLUTIONARY FINE
TUNING
Evolutionary heuristics such as genetic algorithms
can be used to solve a variety of optimization ap-
proaches and were originally introduced by Holland
(1992). Here we use a GA for fine-tuning existing
CV methods. Thus we differ from GP approaches as
these intend to optimize the structure of a CV process.
Within this section, we introduce a fitness function
and a GA for our use cases.
5.1 Fitness Function
The design of our fitness function has been inspired
by the benchmarking of information retrieval systems
such as search engines. The capability of a search en-
gine to answer a query can be evaluated using a set of
documents. Only a part of the documents are relevant
for the query. The search engine returns a subset of
the documents that it regards as important. The search
engine’s answer is then benchmarked by the number
of relevant and irrelevant documents that it returned
(Baeza-Yates and Ribeiro-Neto, 1999).
If an object recognition algorithm examines a set
of images then it should only detect GUI elements that
are available or in other words: There should be no
false positives. This can be examined using the preci-
sion P(·, ·) of an object recognition algorithm A for a
set of images S:
P(A, S) = 1 −
|out(A, S)\ ob(S)|
|out(A, S)|
(2)
where ob(S) represents a list containing the objects on
the set of images and out(A, S) represents a list con-
taining the objects that the algorithm claims to be on
the images. The elements of both lists are tuples of
the form (i, ob) where i is an image of S and ob is an
object. P ranges from zero to one. The best possi-
ble value of one indicates that an algorithm only de-
tected objects that were actually on the given images.
A value lower than one indicates that the algorithm
detected objects that are not there. In our analogy the
precision measures the amount of relevant documents
among the retrieved ones.
Further, a recognition method should not miss any
object. This can be measured via the recall R(·, ·):
R(A, S) =
|ob(S) ∩ out(A, S)|
|ob(S)|
(3)
Its values also range from zero to one. A value of
one means that the method found all available objects.
A smaller value indicates that the algorithm missed
something. In information retrieval it is used to quan-
tify the amount of relevant documents found by the
method.
We combine both quality measures into one fitness
function F(·, ·):
F(A, S) =
P(A, S)+ R(A, S)
2
(4)
We divide both values by two in order to norm the
fitness values. Thus it also ranges from zero to one.
A perfect algorithm that never misses an object nor
detects objects that are not there is going to achieve a
value of one.
5.2 Genetic Algorithm
Genetic algorithms are population based metaheuris-
tics. Each element of the population represents a solu-
tion for the underlying optimization problem. During
an iteration of a GA, two individuals are drawn from
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
370

the population which is coined selection. These solu-
tions are then combined to create two new solutions.
This step is called crossover. Further, these two solu-
tions may be changed randomly which is named mu-
tation. After these operations the new solutions will
be inserted into the population. The population has
a fixed boundary. Whenever its capacity is reached,
a deletion mechanism is used to make space for new
solutions. This process is repeated until a stopping
criterion is reached. Within this work we stop when a
fitness level of one is reached. A corresponding pseu-
docode is displayed in Algorithm 3.
For our GA we use a binary tournament selection.
Thus we draw two random solutions from the popu-
lation and choose the one with higher fitness. This is
repeated twice in order to get two solutions x and y
that will be used for the crossover operation. For the
latter we use an arithmetic crossover to generate two
new solutions
˜
x and
˜
y:
˜
x = α · x + (1 − α) · y
˜
y = α · y + (1 − α) · x
where α is a number between zero and one.
The parameter k for the ORB algorithm is discrete.
If our GA proposes a floating point number x for it
then we will use bxc.
We apply a creep mutation. Each element gets a
new value with a probability of p. Further, an eli-
tist deletion mechanism is used and thus the elements
with the worst fitness are deleted.
Algorithm 3: Pseudocode of the GA.
1 P = initialize population()
2 while stopping criterion is not satisfied do
3 Choose x, y from P via selection
4 Create
˜
x,
˜
y from x, y via crossover
5 Mutate
˜
x,
˜
y using p
6 insert
˜
x,
˜
y to P
7 if population capacity exceeds limit then
8 perform deletion
9 end
10 return best solution of P
The encoding of a solution is within this work spe-
cific to the computer vision algorithm that we evalu-
ate. If we consider the template matching approach
(Algorithm 1) then we have to determine three param-
eters per ROI (similarity threshold, number of scale
levels, scale level increment). Our method that com-
bines ORB with template matching (Algorithm 2) re-
quires five parameters per ROI (similarity threshold,
number of scale levels, scale level increment, k, β).
Table 1: Intervals of possible values for population initial-
ization and mutation.
parameter range
Algorithm 1 thresholds [0, 1]
Algorithm 2 thresholds [0, 1]
β [0, 1]
k [1, 40]
Scale levels [0, 10]
Scale increments [0, 0.2]
6 EVALUATION
For our evaluation we consider three industrial data
sets of BSH Home Appliances. The company is a
German producer of home appliances and develops
various products ranging from ovens over dishwash-
ers to fridges. For our pixel verification use case we
acquired data of an oven project and for the compo-
nent test use case we acquired data of a fridge and a
dishwasher HMI.
The fridge data set contains 93 different icons to
recognize which are distributed over two regions. We
collected 8 sample images per icon and 8 additional
images containing no icon at all. The dishwasher data
set contains 23 different icons on 4 regions. We col-
lected 10 images per dishwasher icon and an addi-
tional 10 images displaying no icon at all. For the
oven data set we verify entire screens and collected
440 images. We use an 80-20 split to separate each
data set into a training and a test data set.
We draw the new values during mutation or pop-
ulation initialization uniformly at random from Table
1. We use these intervals for all ROIs. We run each
experiment a hundred times and run the GA until a
fitness value of one is reached.
We additionally performed a preliminary param-
eter study for the GA. There the population sizes
100, 200,300..., 500 were studied. For α we con-
sidered 0.1, 0.2, 0.3, ...0.5. Additionally we exam-
ined 0.02, 0.04, 0.6...0.12 as values for p. Hence 150
different combinations have been evaluated for their
convergence speed. We concluded that a suitable
choice for α is 0.4, for the population boundary it is
200, and for p it is 0.1. It is worth mentioning that for
all hyperparameter combinations we could achieve a
fitness of 1.
For our experiments we used a Dell OptiPlex XE3
with 32GB RAM and an Intel i7 8700 processor and it
was not used for anything else during the evaluation.
A Genetic Algorithm for HMI Test Infrastructure Fine Tuning
371
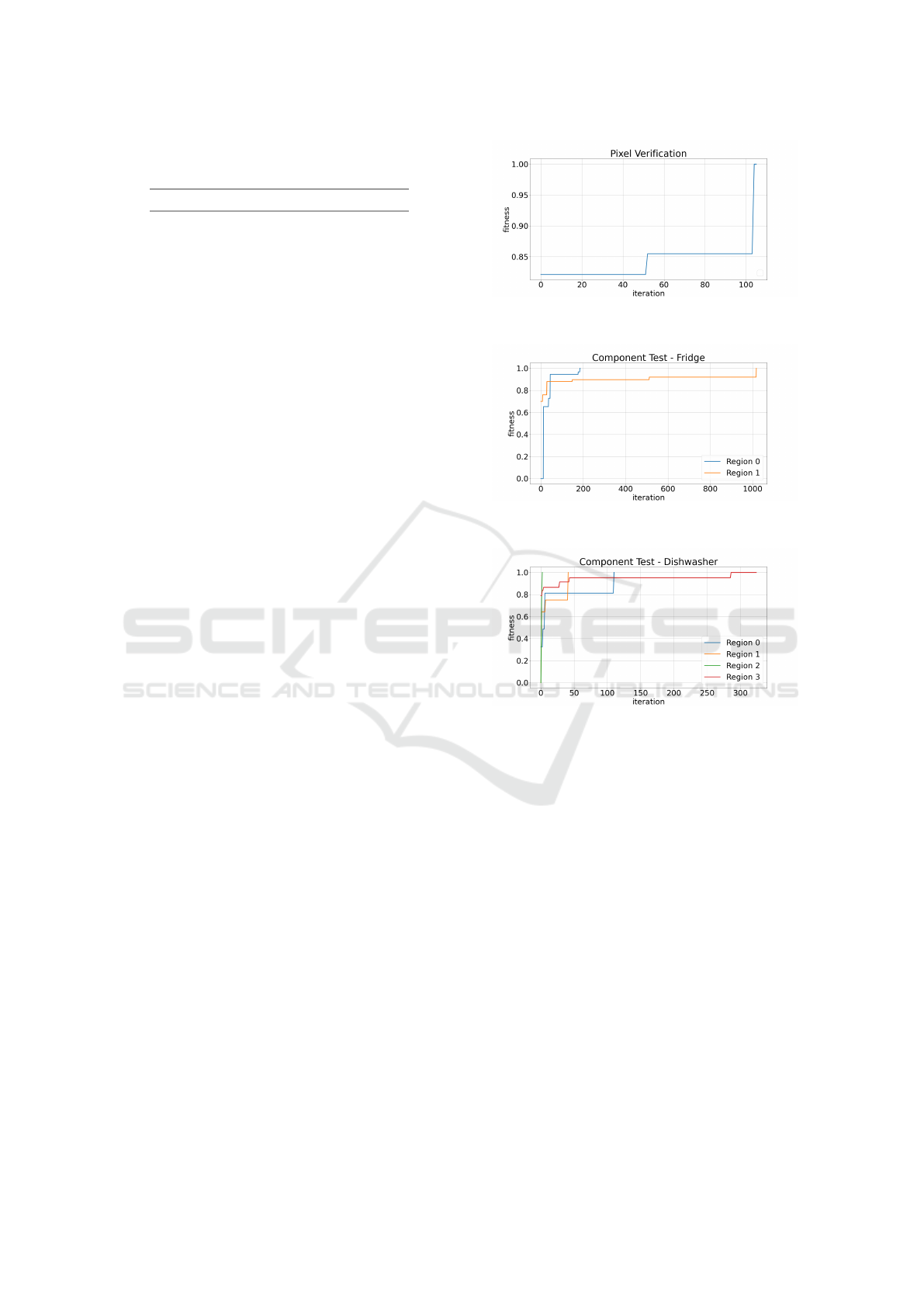
Table 2: Average iterations ±σ until a fitness value of 1 is
reached (rounded to full iterations).
data set region iterations
Pixel verification - 86 ± 11
Fridge 0 167 ± 17
Fridge 1 912 ± 83
Dishwasher 0 101 ± 7
Dishwasher 1 38 ± 3
Dishwasher 2 3 ± 1
Dishwasher 3 293 ± 21
6.1 Learning Process
In Figure 3 we display the learning process of our
GA on the three data sets. We decided to visualize
the longest encountered runs as thus we show the ex-
perienced worst case behaviour and additionally give
insight about the encountered fitness function. How-
ever, we also documented the average number of iter-
ations until a fitness value of 1 is reached in Table 2.
We could achieve fitness values of 1 on each test data
set.
Figure 3 (a) shows the results for our oven data set
(pixel verification). There we could achieve an op-
timal fitness value rather quickly and we could only
observe three plateaus for the fitness function. The fit-
ness function on the fridge data (Figure 3 (b)) is more
diverse and the GA needs much longer to achieve an
optimal value. Region 1 is harder to learn for the GA
as it contains more icons. We could also observe dif-
fering learning times for the dishwasher data (Figure 3
(c)). Especially regions 2 and 3 are highly different. A
closer look at our data revealed that region 2 is quickly
learned because it only contains two rather distinctive
icons. On the other hand, Region 3 displays connec-
tivity icons. These are rather similar which leads to a
need for a more precise set of parameters.
The averaged results displayed in Table 2 show
that there is a certain amount of variance in the learn-
ing process of most regions. Furthermore, the aver-
age number of iterations until convergence is reached
seems to differ from region to region. This can be ver-
ified using statistical tests. We employed a Friedman
test whose null hypothesis is that the average number
of iterations until a fitness value of 1 is reached is the
same for all regions. We computed a p-value below
0.05 which we regard as significant. Thus we reject
the null hypothesis and verify our observation that the
region has an impact on the duration of the learning
process.
(a) Longest encountered learning process for the oven
data set.
(b) Longest encountered learning process for the fridge
data set.
(c) Longest encountered learning process for the dish-
washer data set.
Figure 3: Longest runs of the GA that we encountered dur-
ing all performed experiment repetitions.
6.2 Dealing with Incomplete Data
Due to changes in requirements (Nurmuliani et al.,
2004) and the practice of early testing (Olan, 2003),
we think it cannot be assumed that all icons are known
or implemented when testing starts. Hence we simu-
late that we lack the complete knowledge of all known
icons. We drop a certain number of icons from the
training set but keep them in the test set and evalu-
ate if our calibrated CV methods are still capable of
detecting the test data set correctly.
For these experiments we confine to the fridge
data set as it contained the most icons and it was the
data set where we measured the longest learning pro-
cess. We concentrate on region 1. We drop 1,...,12
icons and observe the fitness values on the test data
set. We repeat this 100 times for each number of icons
to drop.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
372

Table 4: Averaged runtimes in seconds separated by use case and region.
data average runtime σ ROI size
pixel verification 0.0180 0.0080 943 × 186
Fridge 0.0284 0.0019 294 × 69
Fridge 0.0234 0.0019 273 × 65
Dishwasher 0.2186 0.0021 250 × 641
Dishwasher 0.0309 0.0018 204 × 111
Dishwasher 0.0299 0.0026 190 × 117
Dishwasher 0.0117 0.0011 98 × 83
Table 3: Averaged fitness values on the test data set of the
fridge HMI if certain icons are dropped. For the first 8 icons
no drop could be detected.
dropped icons average fitness σ
9 0.9827 0.00459
10 0.9783 0.00603
11 0.97810 0.00605
12 0.97482 0.00916
We summarized our results in Table 3. It can be
seen that we can drop up to 8 icons without reduc-
ing the fitness on the test data set. If more icons are
dropped we see a reduction in terms of the fitness.
Hence, a calibration can deal with new icons that were
not available during the training to a certain degree. If
we had used a neural network then we would have had
to adapt the network architecture (the output layer)
and we would have had to retrain it in order to recog-
nize the upcoming GUI elements. With our approach
we need, in the worst case, a retraining but no adapta-
tion of the model. Note that we could observe similar
effects for the other two data sets.
6.3 Runtime Considerations
Testing pursues the goal to find errors and ensure
product quality. However, the long-term goal of every
company is to earn money. Therefore testing infras-
tructure should also be viewed from an economical
point of view.
Table 5: Averaged runtimes in seconds for the Raspberry Pi
setting.
average runtime σ ROI size
0.2618 0.0017 92 × 51
0.2065 0.0015 80 × 47
0.2158 0.0019 36 × 40
0.2656 0.0017 80 × 50
0.1980 0.0012 70 × 38
The runtime of a piece of testing infrastructure is
crucial since it is a limiting factor for the number of
tests that can be executed. High runtimes may lead to
more test stands that must be acquired and maintained
which in turn leads to a rise in development cost. Thus
we shortly want to summarize and discuss the ob-
served execution times on our desktop computer.
We measured the runtimes of the pixel verification
method using images with a resolution of 943 × 186
pixels. We did the same for Algorithm 2 on the fridge
and dishwasher images which have a resolution of
1490 × 423 and 1399 × 400 respectively.
The averaged results can be seen in Table 4. We
used the combined training and test data sets for the
estimation. Both algorithms have runtimes of less
than one second and, if the regions are rather small,
the execution time may be even less than 100 ms.
7 CONCLUSION AND FUTURE
WORK
We examined two use cases located in the visual ver-
ification of human machine interfaces (HMI). There
are already commercial solutions available which re-
quire test engineers to choose parameters of com-
puter vision methods such as pixel verification man-
ually. We developed a fitness function and employed
a genetic algorithm to automatically fine tune exist-
ing computer vision models. Thus we could erase the
tester engineer’s pain of choosing parameters manu-
ally.
We performed a first proof of concept on sev-
eral different industrial data sets. After a reasonable
amount of training we were able to correctly iden-
tify icons and could detect pixel errors. Further, our
designed algorithms have rather low execution times
which enables us to run high numbers of tests.
Furthermore, we verified our approach on differ-
ent hardware solutions (regarding computer and cam-
era) where we were able to underline the hardware-
independence of our method. This included Rasp-
berry Pi setup which enables companies to cheaply
A Genetic Algorithm for HMI Test Infrastructure Fine Tuning
373

apply our evolutionary technique (if compared to
desktop solutions).
From an engineering perspective we are going to
roll out our system in BSH Home Appliances. Our
next scientific goal is to employ evolutionary tech-
niques to other computer vision models.
REFERENCES
Al
´
egroth, E., Feldt, R., and Kolstr
¨
om, P. (2016). Main-
tenance of Automated Test Suites in Industry: An
Empirical study on Visual GUI Testing. CoRR,
abs/1602.01226.
Al
´
egroth, E., Feldt, R., and Olsson, H. H. (2013). Transi-
tioning Manual System Test Suites to Automated Test-
ing: An Industrial Case Study. In 2013 IEEE Sixth
International Conference on Software Testing, Verifi-
cation and Validation, pages 56–65.
Ammann, P. and Offutt, J. (2016). Introduction to Software
Testing. Cambridge University Press, Cambridge.
Attia, K. A., Nassar, M. W., El-Zeiny, M. B., and Serag,
A. (2017). Firefly Algorithm versus Genetic Algo-
rithm as powerful variable Selection Tools and their
Effect on different multivariate Calibration Models in
Spectroscopy: A comparative Study. Spectrochim-
ica Acta Part A: Molecular and Biomolecular Spec-
troscopy, 170:117 – 123.
Baeza-Yates, R. A. and Ribeiro-Neto, B. (1999). Mod-
ern Information Retrieval. Addison-Wesley Longman
Publishing Co., Inc., USA.
Duan, L., Hofer, A., and Hussmann, H. (2010). Model-
Based Testing of Infotainment Systems on the Basis of
a Graphical Human-Machine Interface. In 2010 Sec-
ond International Conference on Advances in System
Testing and Validation Lifecycle, pages 5–9.
Froglogic (2020). OCR and Installing Tesseract
for Squish. https://doc.froglogic.com/squish/latest/
ins-tessseract-for-squish.html. [Online; accessed 28-
January-2021].
G
´
eron, A. (2017). Hands-on machine learning with Scikit-
Learn and TensorFlow : concepts, tools, and tech-
niques to build intelligent systems. O’Reilly Media,
Sebastopol, CA.
Hierons, R. M. (2005). Artificial Intelligence Methods
In Software Testing. Edited by Mark Last, Abraham
Kandel and Horst Bunke. Published by World Sci-
entific Publishing, Singapore, Series in Machine Per-
ception and Artificial Intelligence, Volume 56, 2004.
ISBN: 981-238-854-0. Pp. 208: Book Reviews. Softw.
Test. Verif. Reliab., 15(2):135–136.
Holland, J. H. (1992). Genetic Algorithms. Scientific Amer-
ican, 267(1):66–73.
Howe, A. E., Mayrhauser, A. V., Mraz, R. T., and Setliff, D.
(1997). Test Case Generation as an AI Planning Prob-
lem. Automated Software Engineering, 4:77–106.
Lara, R. A., Naboni, E., Pernigotto, G., Cappelletti, F.,
Zhang, Y., Barzon, F., Gasparella, A., and Ro-
magnoni, P. (2017). Optimization Tools for Build-
ing Energy Model Calibration. Energy Procedia,
111:1060 – 1069. 8th International Conference on
Sustainability in Energy and Buildings, SEB-16, 11-
13 September 2016, Turin, Italy.
Lowe, D. G. (1999). Object Recognition from Local Scale-
Invariant Features. In Proceedings of the Seventh
IEEE International Conference on Computer Vision,
volume 2, pages 1150–1157 vol.2.
Marwedel, P. (2010). Embedded System Design: Embed-
ded Systems Foundations of Cyber-Physical Systems.
Springer Publishing Company, Incorporated, 2nd edi-
tion.
Mateo Navarro, P., Martinez Perez, G., and Sevilla, D.
(2010). Open HMI-Tester: An open and cross-
platform Architecture for GUI Testing and Certifica-
tion. Computer Systems Science and Engineering,
25:283–296.
Nurmuliani, N., Zowghi, D., and Powell, S. (2004). Anal-
ysis of Requirements Volatility during Software De-
velopment Life Cycle. In 2004 Australian Software
Engineering Conference. Proceedings., pages 28–37.
Olan, M. (2003). Unit Testing: Test Early, Test Often. J.
Comput. Sci. Coll., 19(2):319–328.
OpenCV.org (2020). ORB (Oriented FAST and Rotated
BRIEF). https://opencv-python-tutroals.readthedocs.
io/en/latest/py tutorials/py feature2d/py orb/py orb.
html. [Online; accessed 28-January-2021].
Ramler, R. and Ziebermayr, T. (2017). What You See Is
What You Test - Augmenting Software Testing with
Computer Vision. In 2017 IEEE International Confer-
ence on Software Testing, Verification and Validation
Workshops (ICSTW), pages 398–400.
Rauf, A., Jaffar, A., and Shahid, A. (2011). Fully Auto-
mated GUI Testing and Coverage Analysis using Ge-
netic Algorithms. International Journal of Innovative
Computing, Information and Control, 7.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). ORB: An efficient Alternative to SIFT or
SURF. In 2011 International Conference on Com-
puter Vision, pages 2564–2571.
Singhal, A. (2001). Modern Information Retrieval: A Brief
Overview. IEEE Data Engineering Bulletin, 24.
Stegherr, H., Heider, M., and H
¨
ahner, J. (2020). Classifying
Metaheuristics: Towards a unified multi-level Classi-
fication System. Natural Computing.
Szeliski, R. (2010). Computer Vision: Algorithms and Ap-
plications. Springer-Verlag, Berlin, Heidelberg, 1st
edition.
Zeenyx (2020). AscentialTest: Does Im-
age Recognition support some toler-
ance? https://novalys.net/support/index.php?
/atguest/Knowledgebase/Article/View/832/100/
does-image-recognition-support-some-tolerance.
[Online; accessed 28-January-2021].
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
374
