
Bayesian Mixture Estimation without Tears
ˇ
S
´
arka Jozov
´
a
1,2 a
, Ev
ˇ
zenie Uglickich
2 b
and Ivan Nagy
2 c
1
Faculty of Transportation Sciences, Czech Technical University, Na Florenci 25, 11000 Prague, Czech Republic
2
Department of Signal Processing, The Czech Academy of Sciences, Institute of Information Theory and Automation,
Pod vod
´
arenskou v
ˇ
e
ˇ
z
´
ı 4, 18208 Prague, Czech Republic
Keywords:
Data Analysis, Clustering, Classification, Mixture Model, Estimation, Prior Knowledge.
Abstract:
This paper aims at presenting the on-line non-iterative form of Bayesian mixture estimation. The model used
is composed of a set of sub-models (components) and an estimated pointer variable that currently indicates
the active component. The estimation is built on an approximated Bayes rule using weighted measured data.
The weights are derived from the so called proximity of measured data entries to individual components. The
basis for the generation of the weights are integrated likelihood functions with the inserted point estimates of
the component parameters. One of the main advantages of the presented data analysis method is a possibility
of a simple incorporation of the available prior knowledge. Simple examples with a programming code as
well as results of experiments with real data are demonstrated. The main goal of this paper is to provide
clear description of the Bayesian estimation method based on the approximated likelihood functions, called
proximities.
1 INTRODUCTION
Modeling is an important part of data analysis. It can
be said that there are two main directions the data
analysis aims at. The first one looks for the on-line
prediction of data based on the already measured his-
torical ones. Usually, the output variable is to be
predicted depending on its older values and other ex-
planatory variables which can be currently measured.
A dynamic model, e.g., of a regression type, must be
constructed and mostly also estimated in an on-line
way. Here, the task is to determine the value of the
output in a future time instant.
The second data analysis direction is interested in
working modes of a system rather than in the values of
the data themselves. In this direction, classes of sim-
ilar data are constructed and the newly coming data
records are classified to them, i.e., a class to which
the data record belongs is estimated. The question
here can be, for example, what severity of a traffic ac-
cident we can expect if the surrounding circumstances
are like those just measured.
There are well known methods which can do these
tasks. The most famous methods for clustering are
a
https://orcid.org/0000-0001-5065-633X
b
https://orcid.org/0000-0003-1764-5924
c
https://orcid.org/0000-0002-7847-1932
e.g., k-means and its variants (Jin and Han, 2011;
Kanungo et al., 2002; Likas et al., 2003), fuzzy
clustering (De Oliveira and Pedrycz, 2007; Panda
et al., 2012), DBSCAN (Kumar and Reddy, 2016)
and hierarchical clustering (Nielsen, 2016; Ward Jr,
1963). For classification, one can use e.g., neural
networks, decision trees, logistic regression (Mai-
mon and Rokach, 2005; Kaufman and Rousseeuw,
1990) or genetic algorithms (Pernkopf and Bouchaf-
fra, 2005). However, all the mentioned tasks can
be also solved using estimation of a mixture model.
Its iterative version called the EM algorithm (Bilmes,
1998) is also well known.
In this area, methods of mixture estimation based
on the Bayesian principles play an important role.
One of them, called Quasi-Bayes, has been devel-
oped in (K
´
arn
´
y et al., 1998) followed by (K
´
arn
´
y et al.,
2006). Following this research, several other methods
have been suggested, mostly for different models of
the components exploited (Nagy et al., 2011; Nagy
and Suzdaleva, 2013; Nagy et al., 2017; Suzdaleva
et al., 2017; Suzdaleva and Nagy, 2019), etc. They
bring a considerable simplification of the estimating
algorithm. The core of the last of them is the use of
the proximity of the measured data record to a distri-
bution (the model of a specific working point of the
analyzed system).
Jozová, Š., Uglickich, E. and Nagy, I.
Bayesian Mixture Estimation without Tears.
DOI: 10.5220/0010508706410648
In Proceedings of the 18th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2021), pages 641-648
ISBN: 978-989-758-522-7
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
641
This paper tries to explain the nature and the func-
tionality of the proximity introduced in (Nagy et al.,
2016; Nagy and Suzdaleva, 2017) as simply as pos-
sible. It also presents the simplest possible form of
the whole mixture estimation algorithm, based on the
proximity, with the hope it will be fully understood
even in its program form.
The paper is organized as follows. The first part
is devoted to the link between the density function
of a random variable and its realizations. Here, it is
stressed that in the same way as realizations lie near
the top of the density function, it is possible to say that
the nearer the realization lies to the top of the density
function, the higher is the probability that it belongs
to its random variable. Then the notion of the proxim-
ity and its properties are discussed. The second part
of the paper demonstrates a simple algorithm of mix-
ture estimation in the whole. Conclusions close the
paper.
2 PRELIMINARIES
2.1 Density Function and Its
Realizations
Let us have a scalar normally distributed random vari-
able y with the known expectation µ and variance
r = 1
f (y|µ). (1)
Now, let us generate values y
1
,y
2
,··· from this distri-
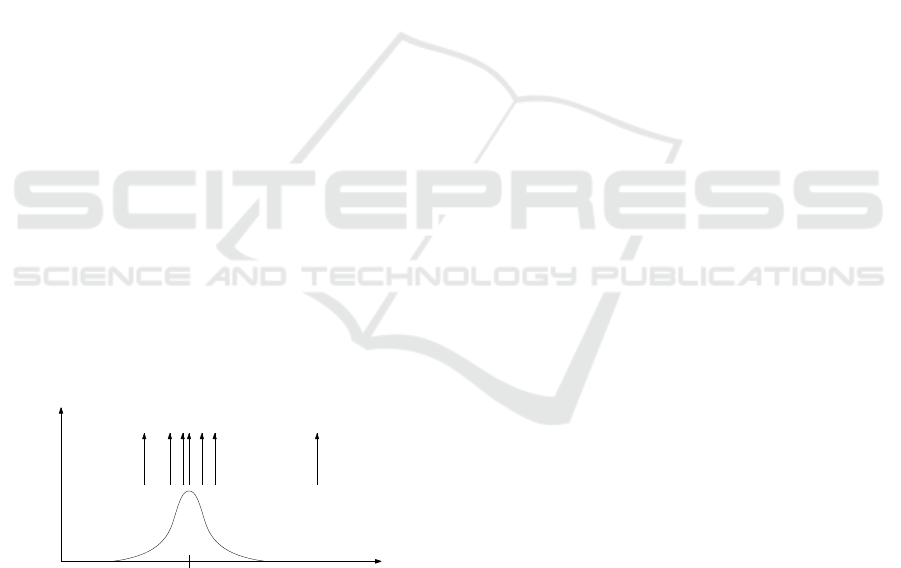
bution. An example of such situation is depicted in
Figure 1. Here we can see the normal distribution and
y
f(y)
y
1
y
2
y
3
y
4
y
5
y
6
y
7
f(y|µ)
µ
Figure 1: A fixed distribution of random variable y with its
realizations.
several values generated from it (the up arrows). Ac-
cording to the nature of the stochastic principles, the
densest are the values near to the top of the density
function. The larger is their distance from the top, the
smaller is the probability of generating such a value.
In Figure 1, the value y
3
is in a position where the
occurrence of the values is rare and the value y
7
is
so far that we can suppose that it has been generated
from some other density function whose expectation
lies somewhere to the right of our one.
The same can be said about measured values. If
the value is near the top of the density estimated from
the past data, we can assume it belongs to it. The more
remote is the value position from the density, the less
is the probability that it belongs to it. If it is very far
from it, we can conclude that it belongs to another
probability density. If in Figure 1 the data y
1
up to y
6
have been used for estimation of the depicted density
function, then we can assume y
7
to come from some
other distribution.
2.2 Likelihood
Likelihood is the most important and frequently used
tool for estimation. It is also a part of the posterior
density produced by the application of the Bayes rule,
see, e.g., (K
´
arn
´
y et al., 1998; K
´
arn
´
y et al., 2006).
For a model f (y|Θ) with the parameters Θ and the
measured dataset D =
{
y
1
,y
2
,· ·· ,y
t
}
, the likelihood
L
t
(Θ) is defined as a function of Θ and data D with
independent samples
L
t
(Θ) =
t
∏
τ=1
f (y
τ
|Θ), (2)
in the theory of estimation taken as a function of Θ.
However, it can be interpreted also as a function of
actual data y
t
. We can write
˜
L
t
(Θ,y
t
) ∝
t
∏
τ=1
f (y
τ
|Θ) = f (y
t
|Θ)
t−1
∏
τ=1
f (y
τ
|Θ), (3)
where now y
t
is taken as still unmeasured data en-
try and the rest of values
{
y
1
,y
2
,· ·· ,y
t−1
}
as already
measured and
˜
L denotes the modified view of the like-
lihood.
If we take an integral of
˜
L over all possible values
of Θ, denoted by Θ
∗
, we obtain
Z
Θ
∗
f (y
t
|Θ)
t−1
∏
τ=1
f (y
τ
|Θ)dΘ = f (y
t
|y
t−1
,y
t−2
,· ·· ,y
1
),
(4)
which is the predictive probability density function of
the actual data y
t
.
Thus, we can state:
• L
t
(Θ) serves for the estimation of the parameter
Θ (the likelihood) and
•
R
Θ
∗
L
t
(Θ)dΘ is the predictive density function for
the modeled variable y (the integrated likelihood)
(K
´
arn
´
y et al., 2006).
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
642
2.2.1 Use of Likelihood for Parameter
Estimation
We can show the sense of the likelihood as an esti-
mator of the unknown parameter with the help of the
following example.
Let us have a scalar normal random variable y
with the probability density function (denoted by
pdf) f (y|Θ) with the known variance r = 1 and un-
known expectation Θ = µ. For the measured data
{
y
1
,y
2
,· ·· ,y
t
}
, we can draw the distributions in-
volved in the likelihood as functions of parameters in
Figure 2. As it is known and can be guessed from the
figure, their product gives a distribution, which lies in
the position of the average value taken as the point es-
timate for this case. Moreover, due to the properties
of the distribution, the product will be a very narrow
function, and the more narrow it is, the more data are
involved. So, the precision of the estimate grows with
the increasing number of data.
µ
f(y)
y
1
y
2
y
3
y
4
y
5
Figure 2: The product of the distributions involved in the
likelihood.
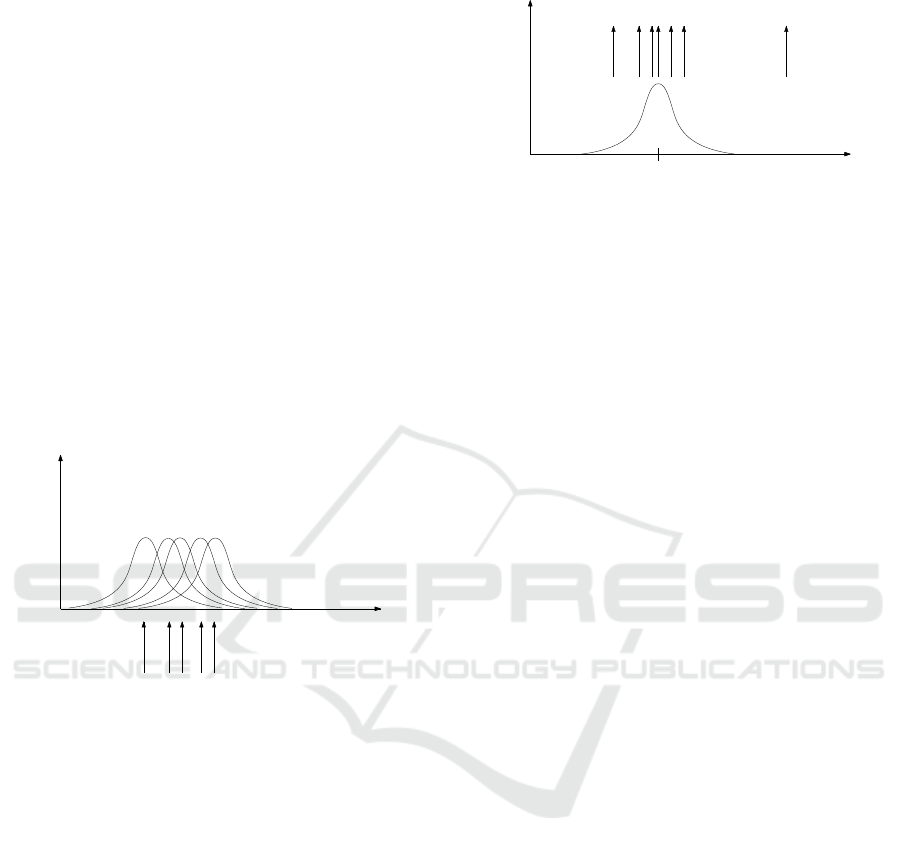
2.2.2 Use of Likelihood for Prediction
The integrated likelihood taken as a function of the
actual data value y
t
is the prediction which can be
taken as a measure of the closeness of a measured
value to the predictive density function based on the
model from which the likelihood has been produced.
This is demonstrated in Figure 3.
Figure 3 is similar to Figure 1, but instead of a
fixed distribution, now, we have the estimated predic-
tive one generating the data as predictions. Similarly
to Figure 1, we can see that the distance of a realiza-
tion from the distribution can be viewed as a measure
of membership of the realization to the distribution.
Notice, that the membership is not crisp, but it is
expressed in a form of values of probabilistic weights
(after normalization).
y
t
y
1
y
2
y
3
y
4
y
5
y
6
y
7
f(y
t
|y
t−1
, y
t−2
, · · · , y
1
)
ˆ
µ
t−1
Figure 3: The distribution of normal random variable in a
role of predictor.
2.3 Proximity
The proximity is defined as the integrated likelihood
(K
´
arn
´
y et al., 2006) with the inserted value of the ac-
tual data record y
t
and actual point estimates of the
parameters
ˆ
Θ
t−1
. It measures a kind of a distance of
y
t
from the estimated predictive pdf, which character-
izes the model of y
t
. In other words, we can say that
the proximity measures the distance of the measured
data entry to the model of the output variable y
t
. We
can demonstrate its derivation as follows.
As we have said, the integrated likelihood (predic-
tive pdf) has the form
f (y
t
|y
t−1
,y
t−2
,· ·· ,y
1
) =
Z
Θ
∗
f (y
t
|Θ)
t−1
∏
τ=1
f (y
τ
|Θ)dΘ,
(5)
where f (y
t
|Θ) is the model and
∏
t−1
τ=1
f (y
τ
|Θ) is the
likelihood L
t−1
(Θ) for “past” data up to time t − 1.
Using the Maximum Likelihood Estimate (MLE), the
point estimate
ˆ
Θ
t−1
of Θ is the argument of maximum
of the likelihood. Moreover, it is known that for a
sufficient amount of informative data it is a very slim
function. To avoid problems with the integration, we
replace the likelihood by a Dirac function
L
t−1
(Θ) → δ
Θ −
ˆ
Θ
t−1
, (6)
where δ (x − a) is nonzero only for x = a and accord-
ing to (Temple, 1955)
Z
∞
−∞
δ (a −b)da = 1. (7)
For this function it holds (Kanwal,1998)
Z
∞
−∞
f (x)δ(x − a) dx = f (a) . (8)
Now, when we substitute Dirac function δ
Θ −
ˆ
Θ
t−1
for the likelihood in (5), we obtain the formula for the
proximity q
t
q
t
=
Z
Θ
∗
f (y
t
|Θ)δ
Θ −
ˆ
Θ
t−1
dΘ = f
y
t
|
ˆ
Θ
t−1
.
(9)
Its properties fully follow from the above considera-
tions.
Note, the old data are hidden in the estimate
ˆ
Θ
t−1
.
Bayesian Mixture Estimation without Tears
643

3 BAYESIAN VIEW OF MIXTURE
ESTIMATION
Mixture models (Bouguila and Fan, 2020; McNi-
cholas, 2020; Nagy et al., 2011; Nagy and Suzdal-
eva, 2017) are used for a description of multimodal
data, i.e., data produced by a system that exists in
several working points. Each working point has its
own model called the component and a model that de-
scribes switching of these components.
3.1 Model
A mixture model with static components consists of:
1. A set of ordinary models (components)
f
i
(y
t
|Θ
i
), i = 1,2,··· , n
c
with y
t
the modeled variable and Θ
i
the param-
eter of the i-th component. They can be arbitrary
models for which a recursive estimation of param-
eters exists, which are mostly models from the ex-
ponential family. Here, we will assume them to
be static Gaussian models in the m-dimensional
space (here, m will be equal to one).
2. A pointer model, which is a categorical model for
a discrete variable called the pointer (K
´
arn
´
y et al.,
1998). The pointer value at time t indicates the ac-
tive component, which generates the current data.
The pointer model has the form
f (c
t
|α) = α
c
t
, (10)
where c
t
denotes the pointer variable at time t and
the parameter α is a vector of probabilities such
that α
i
≥ 0 ∀i and
∑
n
c
i=1
α
i
= 1.
3.2 Estimation of the Component
Parameters
There are two different views on how the mixture
models work:
1. The switching of the components is known or the
components are not overlapping, so that we can
measure the switching.
2. The switching is not known and has to be esti-
mated on the basis of data coming from the indi-
vidual working modes that are overlapping, which
makes the estimation unambiguous. All of the
components can be active at the same time, each
with its own probability.
The first case is simple and easy to deal with. Each
time instant, knowing exactly the active component,
we fully update its statistics and compute the point
estimates of its model parameters. All other compo-
nents stay unchanged.
3.2.1 Example
For static normal components f
i
(y
t
|µ
i
) with the
known variance and scalar modeled variable, the pa-
rameter µ is the expectation. It is well known, that
the optimal estimate of the expectation is the sample
average that is defined as a sum of measured outputs
divided by their number. That is why we can choose
the statistics as follows: S
i
, which is the sum of mea-
sured outputs and n
i
, which is their number. Each
component will have these two statistics. Their on-
line update can be written in the following form
S
c
t
;t
= S
c
t
;t−1
+ y
t
, (11)
n
c
t
;t
= n
c
t
;t−1
+ 1, (12)
where c
t
is the measured (known) label of the active
component at time t.
The second case is more complicated, but also
much more realistic in applications. The basic prob-
lem in this case is the estimation of the weights w
t
determining the probabilities of the membership of
the measured data item y
t
to individual components.
These weights are practically given by the normalized
proximities of y
t
to the currently estimated compo-
nents.
Remarks.
1. Actually, the weights are given not only by prox-
imities, but the proximities are decisive and can
be taken as the only factor for the construction of
the weights.
2. For determining proximities, we need the param-
eter point estimates (see (9)). It means that what
we perform is the point estimation.
From the theoretical derivation it follows that the es-
timation of the individual components is similar to
that for single models (11)–(12). The only differ-
ence is that the statistics of all the components are up-
dated and the actual data added to these statistics are
weighted by the corresponding entry of the weighting
vector w
t
.
3.2.2 Example
For the situation introduced in the previous example,
the update of the component statistics can be derived
similarly to (K
´
arn
´
y et al., 1998; K
´
arn
´
y et al., 2006) as
follows:
S
i;t
= S
i;t−1
+ w
i;t
y
t
, (13)
n
i;t
= n
i;t−1
+ w
i;t
(14)
for all i = 1, 2,· ·· ,n
c
. A a result, the measured data
go to each component with the ratio corresponding to
the probability they belong to it.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
644

Remark. In addition to the estimation of compo-
nents, the pointer model should also be estimated, see
(K
´
arn
´
y et al., 1998; K
´
arn
´
y et al., 2006). However, its
importance is negligible and the whole pointer model
estimation can be omitted.
3.3 Algorithm of Mixture Estimation
The algorithm of the mixture estimation takes the fol-
lowing form:
Initialization:
1. Set the number of components n
c
.
2. Set the initial components f
i
(y
t
|Θ
i
), i =
1,2, ·· · ,n
c
. Here, they are scalar static Gaussian
models with the known variance and initial
expectation
ˆ
Θ
0
= ˆµ
0
.
3. Set the initial statistics for the component estima-
tion corresponding to the initial parameters. Here,
S
0
denotes the vector of the initial sums of the
prior values of y
t
in the individual components
and n
0
is the vector of the corresponding initial
numbers of prior data. They can be set according
to the expert knowledge.
Time loop:
For t = 1, 2,··· ,N
1. Measure the current data y
t
.
2. Construct the weighting vector w
t
:
(a) Compute the proximities q
i
= f
y
t
|
ˆ
Θ
i
.
(b) Normalize the proximities
w
t
= [q
1
,q
2
,· ·· ,q
n
c
]/
n
c
∑
i=1
q
i
. (15)
3. Perform the update of the component statistics
S
i;t
= S
i;t−1
+ w
i;t
y
t
, (16)
n
i;t
= n
i;t−1
+ w
i;t
. (17)
4. Compute the point estimates of the expectations
ˆµ
i;t
=
S
i;t
n
i;t
. (18)
5. For the case of classification, determine the actual
component
ˆc
t
= argmax (w
t
). (19)
end
3.4 Program for Estimation of Normal
Static Components
A code of the mixture estimation algorithm imple-
mented in a programming free and open source envi-
ronment Scilab (www.scilab.org) is presented below.
// Estimation of a simple mixture
// ------------------------------
clc, clear, close, mode(0)
N=500;
pS=[.5 .2 .3];
mS=[2 5 7];
// Simulation
for t=1:N
cS(t)=sum(rand(1,1,’u’)>cumsum(pS))+1;
y(t)=mS(cS(t))+.6*rand(1,1,’n’);
end
// Estimation
S=[4 5 6]; n=[1 1 1];
m=S./n; nc=length(S);
for t=1:N
for j=1:nc // proximity
q(j)=exp(-.5*(y(t)-m(j))ˆ2);
end
w=q/sum(q); // weights
[xxx,c(t)]=max(w);
for j=1:nc // statistics
S(j)=S(j)+w(j)*y(t); // update
n(j)=n(j)+w(j);
m(j)=S(j)/n(j); // point estimate
end
end
acc=sum(cS==c)/N // accuracy
The presented program simulates the data and per-
forms the mixture estimation with them. A histogram
of the data is given in Figure 4. With the simulations
used, the resulting accuracy Acc computed as a ratio
of true classifications is
Acc = 0.958.
4 EXPERIMENTS
The experiments with the aim to demonstrate prop-
erties of the mixture estimation are performed using
the data measured on a driven car. The independent
variables are “speed” [km/h] of the car and engine
“torque” [N · m], while the modeled variable is the fuel
Bayesian Mixture Estimation without Tears
645
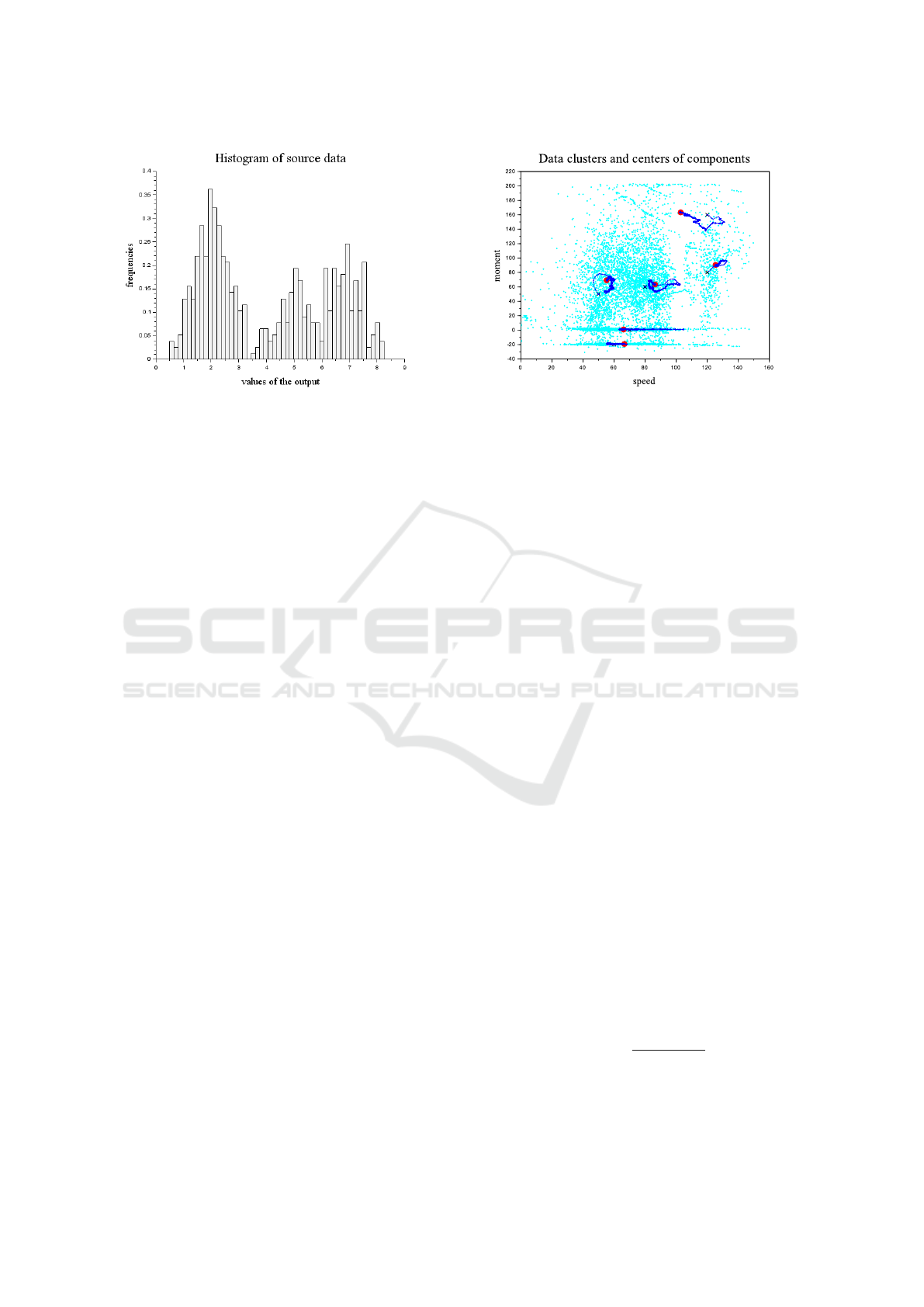
Figure 4: The histogram of simulated data.
“consumption” [ml/km]. These data are very suitable
for our case as they are naturally multimodal. Neg-
ative torque means breaking by engine, zero torque
implies idling. The speed 50, 90, 130 [km/h] rep-
resents driving in a town, out of a town and on mo-
torway respectively and both high torque and speed
occur mostly during driving. All these modes can be
clearly visible as the data clusters in Figure 5. The
dataset contains 7000 items measured with the period
2 s.
The experiments present two types of use of the
mixture model. The first one is designed for the un-
supervised clustering just looking for data clusters,
while the second one performs supervised learning for
the classification.
4.1 Clustering in Data Space
Here, we use a static model with two dimensional
modeled variable x
t
= [x
1
,x
2
]
0
= [speed,torque]
0
. The
models of the components have the form
x
t
= θ
c
t
+ e
c
t
;t
(20)
which are the Gaussian distributions with the noise e
c
t
and parameters θ
c
t
in the two-dimensional space x
1
×
x
2
. The index c
t
denotes the current working mode of
the system.
Before the estimation starts, we need to determine
the prior centers of the components (i.e., their ex-
pectations), their width (i.e., the covariance matrices)
and corresponding prior statistics. They can be easily
guessed from the data clusters obtained in a xy-graph
of the variables x
1
and x
2
– see Figure 5 (cyan dots).
All 7000 samples have been used for clustering.
The result of the experiments is shown in Figure 5.
The initial centers have been set manually accord-
ing to the appearance of the clusters. Even if the ini-
tial positions can look ideal, it seems that their really
Figure 5: Data clusters and centers of components.
Here, the cyan dots form the data clusters, the blue
crosses are the initial positions of the component
centers and red circles are their final positions after
finishing the estimation. The blue dot-dash curves
show the evolution of the component centers during
the estimation.
ideal positions are slightly shifted. In the case of more
explanatory variables the task of initialization is much
more difficult (but very important).
4.2 Estimation of Fuel Consumption
Here, the previous variables “speed” (x
1
) and
“torque” (x
2
) are used as the measured independent
ones and the variable y “consumption” takes the role
of the model output. The component models for
c
t
= 1,2,··· , 6 are
y
t
= θ
1,c
t
x
1;t
+ θ
2;c
t
x
2;t
+ e
c
t
;t
(21)
Now, we work at the three-dimensional space. The
bottom plane with clusters is the data [speed, torque]
0
and each point in this plane is assigned by the spe-
cific value of the consumption. This dependence is
modeled locally in each cluster (given by the corre-
sponding component) by the component model.
For the experiments, 5500 samples have been used
for learning and 1500 samples for testing. The result
of the experiments in the form of the output prediction
is depicted in Figure 6.
It can be seen, that the prediction corresponds to
the measured values. For numerical evaluation of the
result, we use the relative prediction error
RPE =
vax(y − yp)
vax(y)
defined as the variance of the prediction error y − yp
divided by the variance of the output.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
646
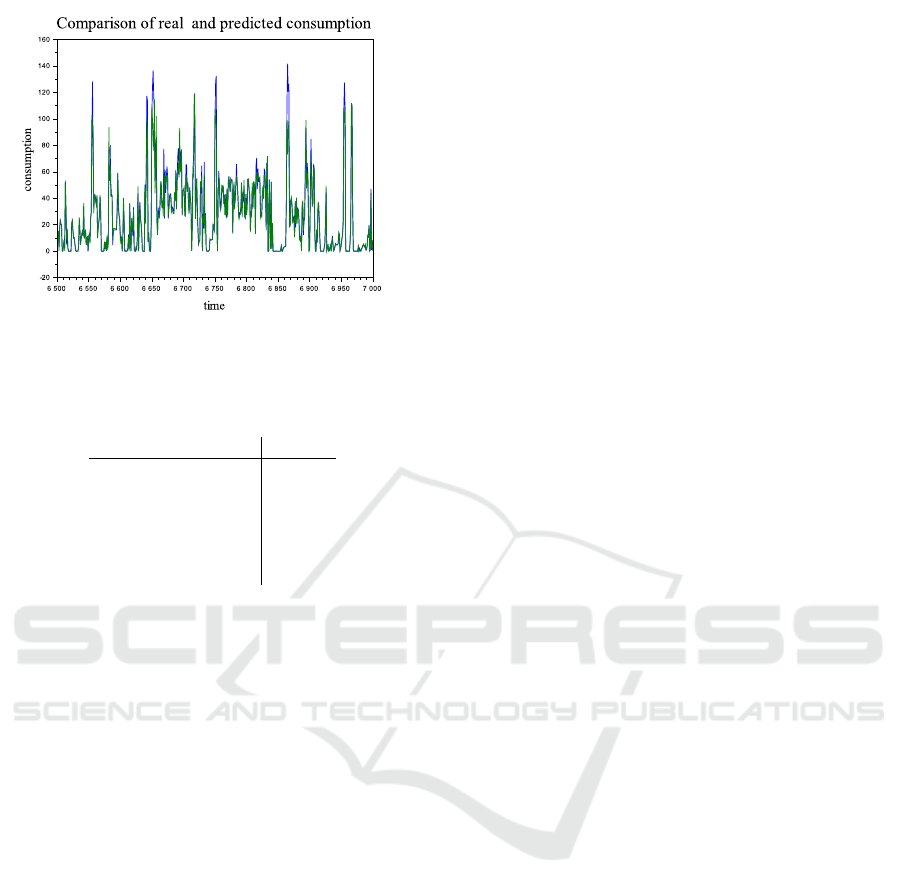
Figure 6: The testing part of the fuel consumption (blue)
and its prediction (green).
Table 1: Comparison of the results for mixture estimation
and other selected methods.
method RPE
Mixture model 0.0055
EM algorithm 0.0057
Neural networks 0.217
Linear regression 0.174
3rd order regression 0.138
Random forest 0.129
Even if the goal of the paper is not competitive
but only explanatory, we have performed a compari-
son with several other methods. The Knime Analytics
Platform (https://www.knime.com) has been used for
the experiments.
The results of the experiment for the mixture
model and other selected methods are in Table 1.
However, it is necessary to mention that only EM
algorithm is directly comparable with mixture estima-
tion method. The rest of them do not take into account
the data multimodality.
The results confirm advantages of the local mod-
eling and predicting.
5 CONCLUSIONS
The paper presents the Bayesian estimation of a
model formed by a finite number of sub-models (com-
ponents) together with a pointer indicating the cur-
rently active component. The model with its ap-
proximate estimation according to the Bayes rule can
be used in several regimes depending on the type
of model describing its components. It can solve a
problem of prediction if the components are dynamic
models. From the point of view of data analysis, the
most important tasks solved are clustering and classi-
fication. For them, static models of components are
chosen.
The paper explains the basic features of the mix-
ture estimation based on proximities - the approxi-
mated integrals of component likelihood functions. It
presents the basic notions and hopefully clearly ex-
plains the notion of proximity, which simplifies the
estimation algorithm considerably.
The further development of the theory will con-
centrate on a possibility of using various distribu-
tions for mixture components, especially in connec-
tion with specific data samples coming from practical
applications.
ACKNOWLEDGEMENTS
The work has been partially supported by the project
ECSEL 826452 / MSMT 8A19009 Arrowhead Tools
and project SGS21/077/OHK2/1T/16 of the Student
Grant Competition of CTU.
REFERENCES
Jin, X. and Han, J. (2011). K-Means Clustering. In: Sammut
C., Webb G.I. (eds) Encyclopedia of Machine Learn-
ing. Springer, Boston, MA.
Kanungo, T., Mount, D. M., Netanyahu, N. S., Piatko, C.
D., Silverman, R. and Wu, A. Y. (2002). An efficient
k-means clustering algorithm: Analysis and imple-
mentation. IEEE transactions on pattern analysis and
machine intelligence, 24(7), 881-892.
Likas, A., Vlassis, N. and Verbeek, J. J. (2003). The
global k-means clustering algorithm. Pattern recogni-
tion, 36(2), 451-461.
De Oliveira, J. V. and Pedrycz, W. (Eds.). (2007). Advances
in fuzzy clustering and its applications. John Wiley &
Sons.
Panda, S., Sahu, S., Jena, P. and Chattopadhyay, S. (2012).
Comparing fuzzy-C means and K-means clustering
techniques: a comprehensive study. In Advances in
computer science, engineering & applications (pp.
451-460). Springer, Berlin, Heidelberg.
Kumar, K. M. and Reddy, A. R. M. (2016). A fast DB-
SCAN clustering algorithm by accelerating neighbor
searching using Groups method. Pattern Recognition,
58, 39-48.
Nielsen, F. (2016). Introduction to HPC with MPI for Data
Science. Springer.
Ward Jr, J. H. (1963). Hierarchical grouping to optimize an
objective function. Journal of the American statistical
association, 58(301), 236-244.
Maimon, O. and Rokach, L. (2005). Data mining and
knowledge discovery handbook. Springer US.
Kaufman, L. and Rousseeuw, P. J. (1990). Finding Groups
in Data: An Introduction to Cluster Analysis (1 ed.).
New York: John Wiley.
Bayesian Mixture Estimation without Tears
647

Bilmes, J. A. (1998). A gentle tutorial of the EM algorithm
and its application to parameter estimation for Gaus-
sian mixture and hidden Markov models. International
Computer Science Institute, 4(510), 126.
K
´
arn
´
y, M., Kadlec, J., Sutanto, E. L., Roj
´
ı
ˇ
cek, J.,
Vale
ˇ
ckov
´
a, M. and Warwick, K. (1998, September).
Quasi-Bayes estimation applied to normal mixture.
In Preprints of the 3rd European IEEE Workshop on
Computer-Intensive Methods in Control and Data Pro-
cessing (Vol. 98, No. 3, pp. 77-82). Praha.
K
´
arn
´
y, M., B
¨
ohm, J., Guy, T. V., Jirsa, L., Nagy,
I., Nedoma, P., and Tesa
ˇ
r, L. (2006). Optimized
Bayesian Dynamic Advising: Theory and Algorithms.
Springer-Verlag, London.
Nagy, I., Suzdaleva, E., K
´
arn
´
y, M., and Mlyn
´
a
ˇ
rov
´
a, T.
(2011). Bayesian Estimation of Dynamic Finite Mix-
tures. International Journal of Adaptive Control and
Signal Processing, 25(9), 765-787.
Nagy, I. and Suzdaleva, E. (2013). Mixture estimation with
state-space components and Markov model of switch-
ing. Applied Mathematical Modelling, 37(24), 9970-
9984.
Suzdaleva, E. and Nagy, I. (2019). Mixture Initialization
Based on Prior Data Visual Analysis. In: Intuitionis-
tic Fuzziness and Other Intelligent Theories and Their
Applications (pp. 29-49). Springer, Cham.
Nagy, I., Suzdaleva, E. and Petrou
ˇ
s, M. (2017) Cluster-
ing with a Model of Sub-Mixtures of Different Dis-
tributions. In: Proceedings of IEEE 15th International
Symposium on Intelligent Systems and Informatics
SISY 2017, p. 315-320.
Suzdaleva, E., Nagy, I., Pecherkov
´
a, P. and Likhonina,
R. (2017) Initialization of Recursive Mixture-based
Clustering with Uniform Components, In: Proceed-
ings of the 14th International Conference on Infor-
matics in Control, Automation and Robotics (ICINCO
2017), p. 449-458.
Nagy, I., Suzdaleva, E. and Pecherkov
´
a, P. (2016, July).
Comparison of Various Definitions of Proximity in
Mixture Estimation. Proceedings of the 13th Interna-
tional Conference on Informatics in Control, Automa-
tion and Robotics (ICINCO), pp. 527-534.
Nagy, I. and Suzdaleva, E. (2017). Algorithms and Pro-
grams of Dynamic Mixture Estimation. Unified Ap-
proach to Different Types of Components. Springer-
Briefs in Statistics. Springer International Publishing.
Temple, G. F. J. (1955). The theory of generalized func-
tions. Proceedings of the Royal Society of Lon-
don. Series A. Mathematical and Physical Sciences,
228(1173), 175-190.
Kanwal, R., P. (1998) Generalized Functions Theory and
Technique: Theory and Technique 2nd ed. Birkhauser.
Bouguila, N. and Fan, W., Eds. (2020). Mixture Models and
Applications. Springer.
McNicholas, P., D. (2020). Mixture Model-Based Classifi-
cation. Chapman and Hall/CRC.
Pernkopf, F. and Bouchaffra, G. (2005) Genetic-based EM
algorithm for learning Gaussian mixture models. In
IEEE Transactions on Pattern Analysis and Machine
Intelligence, vol. 27, no. 8, pp. 1344-1348, Aug. 2005,
doi: 10.1109/TPAMI.2005.162.
ICINCO 2021 - 18th International Conference on Informatics in Control, Automation and Robotics
648
