
Ride-hailing Emissions Modeling and Reduction through Ride Demand
Prediction
Tanmay Bansal, Ruchika Dongre, Kassie Wang and Sam Fuchs
Cornell University, Ithaca, New York, U.S.A.
Keywords:
Ride-hailing, TNC, Deadheading, Emissions, Ride Demand Prediction, LSTM, RideAustin.
Abstract:
Transportation is the largest contributor of greenhouse gas emissions in the United States. As Transportation
Network Companies (TNCs), such as Uber and Lyft, grow in prevalence, it is imperative to quantify their
emissions impact. We studied the case of Austin, Texas through its primary ride-hailing service - RideAustin
- that has released data on 1.4+ million individual rides over an 11-month period. We estimated a total of
6014.95 metric tonnes of CO
2
emissions from deadheading (when there are no passengers in freight) over
the given time period. We clustered Austin into different zones and built an LSTM-based neural network for
hourly ride demand forecasting on each zone through spatiotemporal features (weather, federal holidays, day
of the week, and a look-back interval). Despite a large out-of-time validation window (7 months), our model
outperforms the XGBoost-based baseline model by 34.86% and the next best comparable model in current
literature by 15.3% in terms of MAE. In addition, we estimated a 10.624% reduction in total deadheading
emissions for the same period given that the ride-hailing drivers on road are routed according to the proposed
hourly ride demand forecasts.
1 INTRODUCTION
Transportation is the largest contributor of greenhouse
gas (GHG) emissions in the United States, accounting
for over a quarter of total US greenhouse gas emis-
sions (Hockstad and Hanel, 2018). These GHG emis-
sions are a primary cause of climate change. Over re-
cent years, companies such as Uber and Lyft, hence-
forth referred to as Transportation Network Compa-
nies (TNCs), that provide on-demand ride-hailing ser-
vices have grown in prominence. These companies
leverage the convenience of mobile apps and provide
shared mobility services, more specifically referred to
as ride-hailing, ride-sourcing, or e-hail services. In
Massachusetts, for example, TNCs had a ridership of
over 91.1 million in 2019, 12% more than that in 2018
(DPU, 2019). In San Francisco, TNCs made up 15%
of all intra-city trips in 2016 (Erhardt et al., 2019).
Throughout the United States, TNCs transported a to-
tal of 2.61 billion passengers in 2017 - 37% more than
the year before (Schaller, 2018).
With this increasing prevalence of TNCs in our
lives, it is imperative to understand the environmental
impact of these services. This need is only reinforced
by the fact that in contrast to other public transit ser-
vices and the traditional taxi industry, TNCs operate
as private entities with minimal regulation - there is
largely no minimum threshold for the emissions effi-
ciency of operating vehicles and no limitations on the
fleet size or on the hours of operation.
In recent years, much work has been done to an-
alyze the effects of ride-sharing services (Wang and
Yang, 2019). In particular, a recent study summa-
rizes how the interplay of different factors - namely,
ride pooling, fuel efficiency of ride-hailing fleets, car-
shedding, deadheading
1
, and modal shift
2
- results
in a net environmental impact of a TNC on its ser-
vice area (Wenzel et al., 2019). Specifically, while
ride pooling, car-shedding, and the inclusion of elec-
tric vehicles in ride-hailing fleets may reduce Vehi-
cle Miles Traveled (VMT)
3
and total emissions, in-
duced rides due to the convenience of such services
and deadheading may increase VMT and emissions.
One key focus of such analysis is the modal
displacement of ride-hailing journeys - what forms
of transit they replace, and to what extent ride-
1
Deadheading is the distance traveled by a vehicle without
passengers in freight (Henao and Marshall, 2019).
2
Modal shift is the overarching trend of change in the mode
of transportation.
3
Vehicle Miles Traveled (VMT) is the total travel by all ve-
hicles in a given geographic area for a given time period.
192
Bansal, T., Dongre, R., Wang, K. and Fuchs, S.
Ride-hailing Emissions Modeling and Reduction through Ride Demand Prediction.
DOI: 10.5220/0010460801920200
In Proceedings of the 7th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2021), pages 192-200
ISBN: 978-989-758-513-5
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved

hailing induces rides which otherwise would not have
taken place. Intercept surveys of ridesourcing users
(Clewlow and Mishra, 2017; Feigon and Murphy,
2016) have led to inconsistent results for the rate
of induced rides and for specific mode replacement.
More technical approaches attempt to predict dy-
namic mode substitution through spatiotemporal anal-
ysis, but the effectiveness of these techniques relies
on the availability of specific behavioral data to build
models. The first study of this sort identified some
specific patterns in mode substitution among riders:
in particular, substitution of more sustainable modes
of transit was highest among passengers who did not
own a car (Henao and Marshall, 2019). Neverthe-
less, the authors acknowledged a complex relation-
ship between those patterns and real outcomes in the
short and long term. The difficulty of this experimen-
tal design (in which a researcher personally drove for
a ride-hailing service) and the challenges in general-
izing local behaviors to other regions makes specific
ride-level behavioral data broadly inaccessible, and
limits more detailed analysis of this relationship.
Another key area of study is deadheading and
the impact on VMT. The distances that drivers cover
while cruising in search of a ride or driving between
rides have been found to add up considerably. Such
travel without passengers can account for 36-45%
of all of the miles traveled by ride-hailing drivers
(Cramer and Krueger, 2016; Komanduri et al., 2018),
leading to significant increases in vehicular emis-
sions. The researchers found that these miles traveled
represent half or more of the additional energy use
caused by ride-hailing vehicles (Wenzel et al., 2019).
As an alternative to deadheading, drivers have the op-
tion to park their cars while waiting to be assigned a
rider, but few choose to do so, largely to avoid parking
costs. When drivers do choose to park, they may of-
ten receive a ride request during or immediately after
parking, so doing so may be inconvenient and drivers
may instead prefer to actively look for riders in pop-
ular areas based on their experience (Kontou et al.,
2020).
It is possible to reduce such deadheading by fore-
casting ride demand and routing drivers to areas with
an impending demand surge. However, much of
the work in ride-hailing demand prediction focuses
on reducing “waiting time and traffic congestion,” in
order to improve the passenger experience and en-
able dynamic scheduling and pricing adjustment (Jin
et al., 2020a). It should be noted that optimizing for
these outcomes does not necessarily produce a reduc-
tion in VMT or total emissions. In particular, Uber
matches riders to vehicles with the objective of con-
currently minimizing riders’ waiting time in specific
areas (Uber Marketplace, 2019). Research has shown
that the energy impact of even traditional origin-
destination routing can be improved by another 3-9%
when routing models are optimized for emissions im-
pact instead of time (Ahn and Rakha, 2013). When
deadheading routes are optimized with the purpose
of reducing VMT, methods and results vary widely.
Some researchers have used LSTMs for ride demand
forecasting (Hou et al., 2019), some have used Con-
volutional Neural Networks (Wang et al., 2019; Ke
et al., 2018), and some researchers have used stack-
ing ensemble learning approaches (Jin et al., 2020b)
as well. However, these models have typically been
tested on smaller test sets due to the limited avail-
ability of data and are often hard to compare due to
different data granularity, regions, time periods, and
services in focus.
Our research contributes to this field in three
ways:
1. We model the emissions impact of ride-hailing
services through directly measuring deadheading
and total emissions per each unique driver and ve-
hicle.
2. We develop a robust ride demand forecasting
model using deep learning techniques that pre-
dicts hourly demands for different regions in a
city, and outperforms existing models.
3. We estimate the reduction in deadheading emis-
sions given that drivers are re-routed hourly based
on the aforementioned forecasts.
The rest of this paper is organized as follows: Sec-
tion 2 briefly describes the data and our methodology;
Section 3 details the results from our models; Section
4 presents a discussion of the results and relevant lim-
itations; Section 5 summarizes the study and suggests
future work; and Section 6 acknowledges those who
have supported us throughout the study.
2 DATA AND METHODOLOGY
2.1 Data Description
We use three public datasets throughout the study:
year-long origin-destination trips and drivers data
from a ride-hailing service called RideAustin
(RideAustin, 2017), vehicular energy efficiency data
for different car models from The U.S Environ-
mental Protection Agency (EPA) (EPA, 2017), and
zip-code specific hourly weather data (humidity,
precipitation, heat index) from World Weather Online
(WorldWeatherOnline, 2020).
Ride-hailing Emissions Modeling and Reduction through Ride Demand Prediction
193
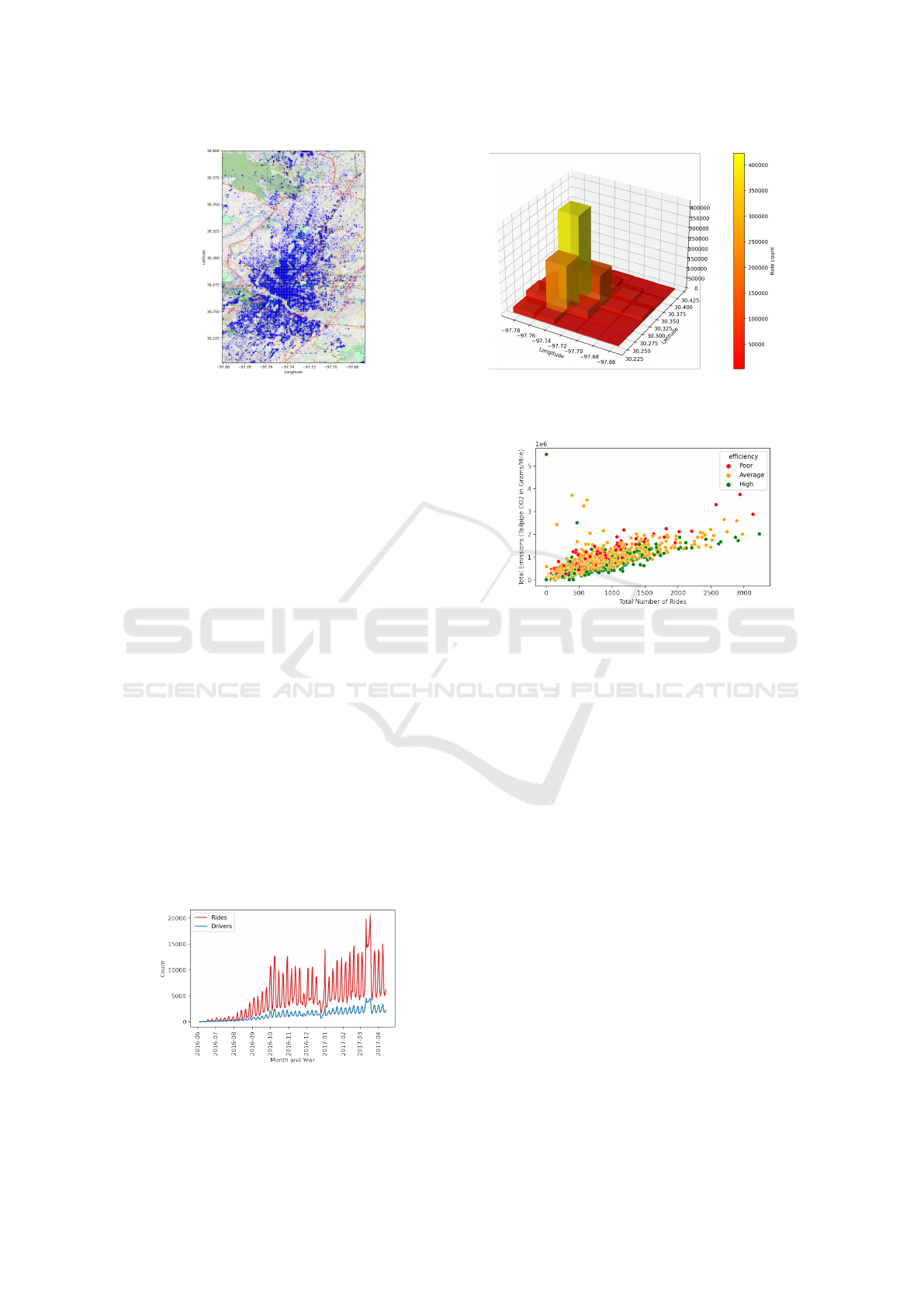
(a) RideAustin pick-up locations in Austin, TX.
(b) RideAustin ride demand distribution.
Figure 1: Pick-up locations and cumulative demand for RideAustin rides (2016-17).
RideAustin Data. RideAustin is a TNC operating
in Austin, Texas, United States, that came into lime-
light after the departure of Uber and Lyft from Austin.
RideAustin published data on over 1.4 million rides,
conducted by over 5000 drivers, over a 11-month pe-
riod (2016-17). Figure 1 describes the pickup loca-
tions and cumulative ride counts for all RideAustin
rides for the given time period. This dataset is a
origin-destination dataset, that has geo-coordinates of
the requested location, start location, end location,
along with corresponding times and distances. Since
riders and drivers are identified by unique IDs, it is
possible to aggregate by drivers and gain more insight
into their behaviors as well. Figure 2 describes the
daily count of rides and unique drivers. The figure in-
dicates a consistent weekly oscillation of the counts,
following a trend of much higher supply as well as de-
mand on the weekends compared to weekdays. This
suggests that most riders in Austin used RideAustin
for entertainment and recreational purposes as op-
posed to daily commute to work or school. The sig-
nificant peak near March of 2017 correlates with the
major South by Southwest festival that took place in
Austin. Overall, the number of rides seemed to in-
crease at a greater pace in comparison to the number
of rideshare drivers.
Figure 2: Daily count of rides and drivers through
RideAustin.
Figure 3: Total emissions by vehicle efficiency for fleet.
Environmental Protection Agency (EPA) Data.
The U.S. Environmental Protection Agency (EPA)
published a dataset regarding the energy efficiencies
of different cars by their model and make. Specif-
ically, the dataset provides a reliable and standard-
ized method of comparing vehicles and their fuel
economies. The dataset included various vehicles’
make and model as well as the associated fuel econ-
omy indicators such as transmission and miles per
gallon (MPG) estimated for “city”, “highway”, and
“combined” conditions. We use this along with the
RideAustin dataset to calculate the emissions pro-
duced by each ride, and consequently for performing
deadheading calculations. We categorize vehicle effi-
ciencies into three categories based on the EPA emis-
sions standards and the underlying data distribution.
The projected EPA CO
2
emissions standard was 225
g/mi (Agency, 2012), and the calculated 25th empiri-
cal quartile of the EPA dataset is 403.95 g/mi. There-
fore, we take a very conservative approach and cat-
egorize vehicles with less than 330 g/mi CO
2
emis-
sions per mile under high efficiency, greater than 330
g/mi and less than 404 g/mi under average efficiency,
and over 404 g/mi under poor efficiency. Figure 3
shows how vehicles under the RideAustin fleet with
poor efficiency create higher emissions.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
194

(a) Driving segments in a standard ride-hailing ride.
(b) Inter-ride deadheading.
Figure 4: Calculation of deadheading for a ride-hailing rides.
2.2 Methodology
2.2.1 Overall Deadheading Miles and Emissions
As detailed in Figure 4a, a standard ride-hailing
driver’s mileage and emissions can be divided into
five segments: (a) commute from a driver’s residence
to the area of service, (b) cruising in search for a ride,
(c) drive to the passenger location on request, (d) ride
from the passenger pick-up location to the passenger
drop-off location, and (e) commute from the last ride
to the driver’s residence. Segments (b) - (d) recur for
as long as the driver decides to be in service for the
day, all segments but (d) contribute to overall dead-
heading emissions, and segments (b), (c), and (e) con-
tribute to ride deadheading emissions.
To calculate (a) and (e), i.e. deadheading miles
and emissions due to the driver’s daily commute, we
first calculate an approximate residential location for
each driver by computing the geometric mean of the
first daily coordinates of that driver’s aggregated trips
(Wenzel et al., 2019). We then calculate the haver-
sine distance
4
between the approximated residential
location and location of the first ride starting point,
and between the last ride’s ending point and the ap-
proximated residential location. To account for the
distance over the road network, the origin-destination
straight-line distances for these commutes are multi-
plied by a scaling factor of 1.4, as derived in Wenzel
et al. (2019) from ride-level data, which is annotated
with a GPS-measured distance in addition to origin
and destination coordinates.
To calculate (b), i.e. inter-ride stalling or cruis-
ing, we estimate segment AB in Figure 4b. The
dataset does provide the number of miles driven to
get to a user’s ride request location from the driver’s
current location (BC). However, corrupted dispatch
location data from the dataset resulted in an inabil-
ity to directly compute AB. Therefore, we assume
a 90
◦
angle between segment AC and segment BC.
This value was obtained as a representative of the me-
4
The haversine formula determines the great-circle distance
between two points on a sphere given their longitudes and
latitudes.
dian between the angle that would produce the largest
amount (180
◦
) and the angle that would produce the
lowest amount (0
◦
) of deadheading. By aggregating
drivers by day, we compute the haversine distance be-
tween the ending location of the previous trip and the
starting location of the following trip to calculate AC.
We then simply compute the Pythagorean distance
and get an estimate for deadheading due to cruising
(AB).
The (c) segment, i.e. the dispatch dis-
tance, is already given in the dataset as the driv-
ing distance to rider parameter.
Finally, we sum (a), (b), (c), and (e) to get the
deadheading miles for each driver for a given day.
This value is multiplied by the emissions efficiency
of each driver’s vehicle model and make to estimate
the total deadheading emissions for that driver for that
day. While we identify it necessary to interpolate
these values due to the lack of availability of other in-
formation, we acknowledge that these values may not
be wholly accurate and anticipate that more research
into driver patterns may be beneficial in development
of a more accurate model. Furthermore, we only cal-
culate CO
2
emissions for simplicity of comparison,
but recognize that other pollutants such as PM, NOx,
NMOG, CO, Formaldehyde, etc. could also serve as
important metrics.
2.2.2 Clustering on Geographical Proximity
The density of ride origins and destinations in Austin
varies greatly with region. For instance, the density
of ride demand around the Airport is much higher
than in any other area (Figure 1b). Therefore, we con-
duct silhouette analysis to determine the optimal k for
k-Means clustering and segment the ride data into k
clusters based on geographical proximity. Silhouette
analysis is a popular graphical technique that allows
for analysis of cluster cohesion and separation, and
is reliable in determining the appropriate number of
clusters for unsupervised learning techniques such as
k-Means (Rousseeuw, 1987).
Ride-hailing Emissions Modeling and Reduction through Ride Demand Prediction
195
2.2.3 Ride Demand Forecasting
We adopt a deep learning approach to forecast hourly
ride demand through spatiotemporal features for each
cluster (or zone). The feature set for each model in-
cludes weather data (humidity, precipitation, heat in-
dex), day of the week, and if that day is a federal hol-
iday. We use a Long Short Term Memory (LSTM)
network to predict the ride demand for the following
hour for each zone. The efficacy of the model is eval-
uated by comparing it against an Extreme Gradient
Boosting (XGBoost) model, which we consider as the
baseline. Each model is described in detail below.
Since our goal is to estimate the reduction in
deadheading emissions through the construction of
this ride demand forecasting model and gauge how it
would generalize in the real world, we choose against
training on several months of data only to evaluate
our results on less than a quarter of the data (as is
prevalent in current literature). Instead, we adopt a
rolling out-of-time evaluation approach to maximize
data coverage and test how our model generalizes
throughout a larger time period. We do this through
running seven sequential iterations of our overarch-
ing model on progressively increasing time windows.
These seven iterations, listed in Table 1, allow for out-
of-time validated ride demand forecasts for a seven-
month period for a given zone.
Table 1: Rolling out-of-time evaluation iterations.
Train Test
Jun ‘16 Jul ‘16
Jun ‘16 - Jul ‘16 Aug ‘16
Jun ‘16 - Aug ‘16 Sep ‘16
Jun ‘16 - Sep ‘16 Oct ‘16
Jun ‘16 - Oct ‘16 Nov ‘16
Jun ‘16 - Nov ‘16 Dec ‘16
Jun ‘16 - Dec ‘16 Aug ‘16
Extreme Gradient Boosting. Gradient boosting
is an algorithm that combines weak base learning
models into a strong learner in an iterative fashion.
Extreme gradient boosting (XGBoost) an improve-
ment on standard gradient boosting, that most notably
uses (i) second-order Taylor expansion, as opposed
to the first-order, of the loss function of the base
model; and (ii) L1 and L2 regularization to improve
generalization (Chen and Guestrin, 2016).
Our model is comprised of 1000 sequential deci-
sion trees and a threshold of 50 for early stopping to
prevent overfitting. This simple model is considered
as our baseline model for ride demand forecasting.
Long Short-Term Memory. A Long Short-Term
Memory (LSTM) network is a special case of Recur-
rent Neural Networks (RNNs) that is capable of learn-
ing long-term dependencies well enough for practical
purposes. RNNs have a short-term memory - they can
carry information from only the time steps immedi-
ately before. As the time steps increase, the informa-
tion from the earlier time steps is diminished, which
makes RNNs unsuitable for forecasting in cases of
longer time-series sequences.
In contrast, a typical LSTM network constitutes
four layers: a cell state, and three gates - input gate,
forget gate, and output gate - that control the cell state
(Hochreiter and Schmidhuber, 1997). These four lay-
ers iteract and comprise a working model through the
following steps:
1. The forget gate ( f
t
) decides what information
is to be discarded from the previous cell state,
based on the output of the previous step h
t−1
and
current input X
t
. The decision is made through
a sigmoid activation function (σ) and the range
is (0, 1), where 0 indicates ‘forget all’, and 1
indicates ‘keep all’. Here, W
f
represents weights
of the respective neurons and b
f
represents bias.
f
t
= σ(W
f
[h
t−1
, X
t
] + b
f
) (1)
2. In order to decide what new information gets
stored in the cell state, there are two steps that
are later combined. First, the input gate (i
t
) - a
sigmoid (σ) layer - decides what information is
to be updated. Second, a tanh layer creates C
t
- a
vector with new candidate values.
i
t
= σ(W
i
[h
t−1
, X
t
] + b
i
) (2)
C
t
= tanh(W
c
[h
t−1
, X
t
] + b
c
) (3)
tanh =
e
x
− e
−x
e
x
+ e
−x
(4)
3. The output is also decided by the output gate (o
t
)
through a two-step process. First, a sigmoid (σ)
layer is run. Second, the cell state (C
t
) is passed
through tanh and multiplied by the output of the
previous sigmoid layer.
o
t
= σ(W
o
[h
t−1
, X
t
] + b
o
) (5)
h
t
= o
t
∗tanh(C
t
) (6)
Our model is comprised of one LSTM layer with
128 hidden neurons and a corresponding dropout
layer (p = 0.2; where p is the probability of a neuron
being excluded from the network) for regularization.
The model has a look-back interval of 6 time-steps
(i.e. 6 hours), 45 epochs, a batch size of 32, and 10%
of the training data reserved for validation in each
epoch. The chosen loss function is Mean Squared
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
196

Error (MSE) but Mean Absolute Error (MAE) and
Root Mean Squared Error (RMSE) are also con-
sidered important indicators of model performance.
These are represented below, where n is the number
of observations, Y
i
is the actual ride demand, and
ˆ
Y
i
is
the predicted ride demand.
MSE =
1
n
n
∑
i=1
(Y
i
−
ˆ
Y
i
)
2
(7)
MAE =
1
n
n
∑
i=1
| Y
i
−
ˆ
Y
i
| (8)
RMSE =
s
1
n
n
∑
i=1
(Y
i
−
ˆ
Y
i
)
2
(9)
2.2.4 Evaluating Reduction in Deadheading
Emissions
By predicting the location of the next ride, given an
hour-day time bucket, we aim to reduce overall inter-
ride deadheading. We first aggregate our set of rides
into buckets for each driver and date. Then, for each
ride and zone, we compute a weighted average of the
distance between the centroid of that zone (obtained
from the earlier k-means clustering) and the current
location of the driver, and the predicted ride demand
for the given hour at that centroid. Through an iter-
ative approach, we found a nearly optimal weighting
of roughly 60% attributed to distance to the centroid
of the driver and 40% to ride demand at that zone.
Given this weighted average, we calculate the op-
timal centroid for each zone as longitude-latitude co-
ordinates. We then calculate the haversine distance
between the location of the last drop-off point and the
centroid (Segment AB, Figure 4b) and the haversine
distance between the location of the centroid and the
next pick-up point (Segment BC, Figure 4b). As ear-
lier mentioned, this value is computed under the as-
sumption that individual drivers are being sent to a
zonal centroid. In other words, after assigning each
driver-ride endpoint to one of 10 zones - computed
by k-means clustering and ride demand forecasting -
we re-route the driver to the centroid of that zone and
stall at that location in preparation for a subsequent
ride. We then aggregate the harversine values to com-
pute an overall prediction for deadheading mileage.
Finally, in a similar manner as in Section 2.2.1,
we utilize the EPA data on vehicular emissions effi-
ciency to compute a value for overall emissions for
each trip by multiplying the calculated deadheading
mileage and the emissions efficiency for the vehicle
used for the trip.
3 RESULTS
In this section, we present the results of the afore-
mentioned components of this paper: estimated over-
all deadheading miles and emissions, clusters based
on geographical proximity, efficacy of ride demand
forecasts, and the estimated reduction in deadheading
emissions given our ride demand forecasting model.
3.1 Estimated Deadheading Miles and
Emissions
We estimated that a total of 17,920,612.565 dead-
heading miles and 6014.952 metric tonnes of dead-
heading emissions were produced by the RideAustin
fleet in Austin, Texas from June 2016 - July 2017
(Table 2). These constitute approximately 59% of
all vehicle miles traveled and emissions by the fleet.
Therefore, more empty CO
2
emissions were produced
than emissions during actual rides. The share of ride
deadheading miles and emissions, which excludes the
deadheading during a driver’s assumed commute to
and back from the service area (as described in 2.2.1),
is slightly lower at 44.4%.
Table 2: Total and deadheading miles and emissions for the
RideAustin fleet (June ‘16 - April ‘17).
Measure VMT (x 10
7
mi) CO
2
(tonnes)
Ride DH 1.34 (44%) 4,527.26 (44%)
Overall DH 1.79 (59%) 6,014.95 (59%)
Total 3.03 10,194,499.33
3.2 Geographical Clusters
Through silhouette analysis, we obtained an optimal
value of k = 10 for k-means clustering. As a result of
this clustering, the region covered by the RideAustin
fleet was divided into 10 zones, as depicted in Figure
5. The clusters have different densities - for example,
the Downtown Austin area (represented by Zone 2)
has a much higher density than Zone 5.
Figure 5: Ride demand clusters in Austin, TX.
Ride-hailing Emissions Modeling and Reduction through Ride Demand Prediction
197

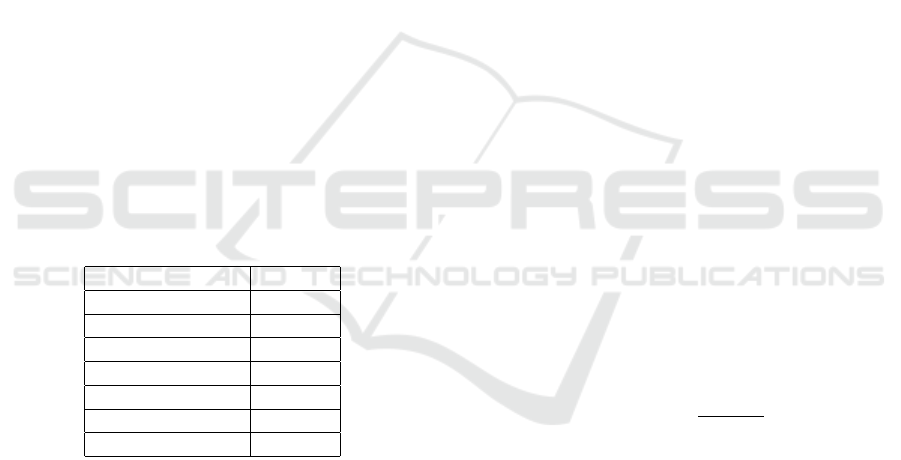
3.3 Ride Demand Forecasts
Table 3: Model performance (July ‘16 - Jan ‘17).
Model MAE RMSE
XGBoost (Baseline) 9.36 26.392
LSTM 6.098 18.421
The proposed models were run on the given time in-
tervals and the predictions for the seven-month period
for each zone were combined for each model. The
LSTM-based neural network, which uses spatial fea-
tures in addition to the 6-hour look-back period, far
outperforms the XGBoost model, which we consid-
ered the baseline model for our study (Table 3).
Figure 6 represents the comparison of ride de-
mand forecasts from both models with the actual ride
demand for a randomly selected 3-week time period
(Nov 4, 2016 - Nov 25, 2016). The LSTM model is
able to forecast well even on unnatural peaks during
weekends. Figure 7 specifically emphasizes the supe-
rior performance of the LSTM model over the base-
line model.
3.4 Estimated Reduction in
Deadheading
If drivers are rerouted based on the hourly ride fore-
casts as estimated by our LSTM model, we estimated
there to be a cumulative 10.624% decrease in total
deadheading miles and emissions in the Austin re-
gion. Figure 8 highlights this difference between the
observed emissions and the revised emissions.
4 DISCUSSION
Our LSTM model outperforms the baseline model by
34.86% and 30.20% in terms of Mean Absolute Er-
ror (MAE) and Root Mean Squared Error (RMSE)
respectively. The model also outperforms a compa-
rable hourly ride demand forecasting model on the
same dataset (Hou et al., 2019) by 15.3% despite a
more robust testing procedure comprised by a much
larger out-of-time validation window. The cumulative
MAE for our model is 6.09 (considering all 10 zones);
this indicates that for any given hour, the model would
predict with an error of around 6 rides on average.
We also estimated the total deadheading emissions
for the recorded period to be 6,014,952 kg CO
2
. Us-
ing our LSTM model, we estimated there to be a
10.624% reduction in these deadheading emissions.
To give perspective to this number, the amount of
emissions reduced by our proposed model is equiv-
alent to over 661,110 pounds of coal burned, 1,380
barrels of oil consumed, carbon sequestered by 780
acres of US forests in one year, or 130 passenger ve-
hicles driven for one year (EPA, 2020).
We acknowledge that the models and methods
used by us have limitations. Most importantly, while
our estimate of 44.4% ride deadheading is well within
the range of estimates by other researchers (Wenzel
et al., 2019; Cramer and Krueger, 2016; Komanduri
et al., 2018), we do not have a reliable way to validate
our calculations for deadheading miles and emissions.
Specifically, deadheading commute calculations, i.e.
(a) and (e) in Figure 4a, are based on assumptions and
existing literature, and may differ with each driver’s
specific behavioral patterns. In addition, the number
of rides through RideAustin progressively increase
over time (Figure 2), especially after August, which
may have affected the forecasting accuracy for earlier
months. Lastly, computational power limitations ren-
dered us unable to optimize the weighted average in
Section 2.2.4 further, but we acknowledge the neces-
sity for improving this ratio.
5 CONCLUSION
In this study, we leveraged data from a ride-hailing
service RideAustin, with over 1.4 million rides and
more than 5000 drivers over an 11-month period, to
perform three tasks: estimate the total deadheading
emissions impact of the RideAustin fleet, build a neu-
ral network to forecast hourly ride demand in it’s ser-
vice area, and estimate the reduction in deadhead-
ing emissions given the aforementioned forecasting
model.
We segmented RideAustin’s service area in
Austin, Texas into 10 zones through a popular un-
supervised learning technique - k-means clustering.
We then built an LSTM-based neural network us-
ing spatiotemporal features to forecast hourly ride
demand for each zone. As a result, we gathered
out-of-time ride demand forecasts for a 7-month pe-
riod for all zones, which allowed us to develop a
model for rerouting drivers based on ride demand. Fi-
nally, we estimated the total reduction in deadhead-
ing emissions given such re-routing. Our LSTM-
based ride demand forecasting model outperforms the
XGBoost-based baseline model by 34.86%, and an-
other state-of-the-art model on the same dataset by
15.3% in terms of Mean Absolute Error (MAE). Fur-
thermore, we estimate a 10.624% reduction in dead-
heading emissions over the 7-month period that the
model was tested on.
We conclude that ride demand forecasting and the
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
198
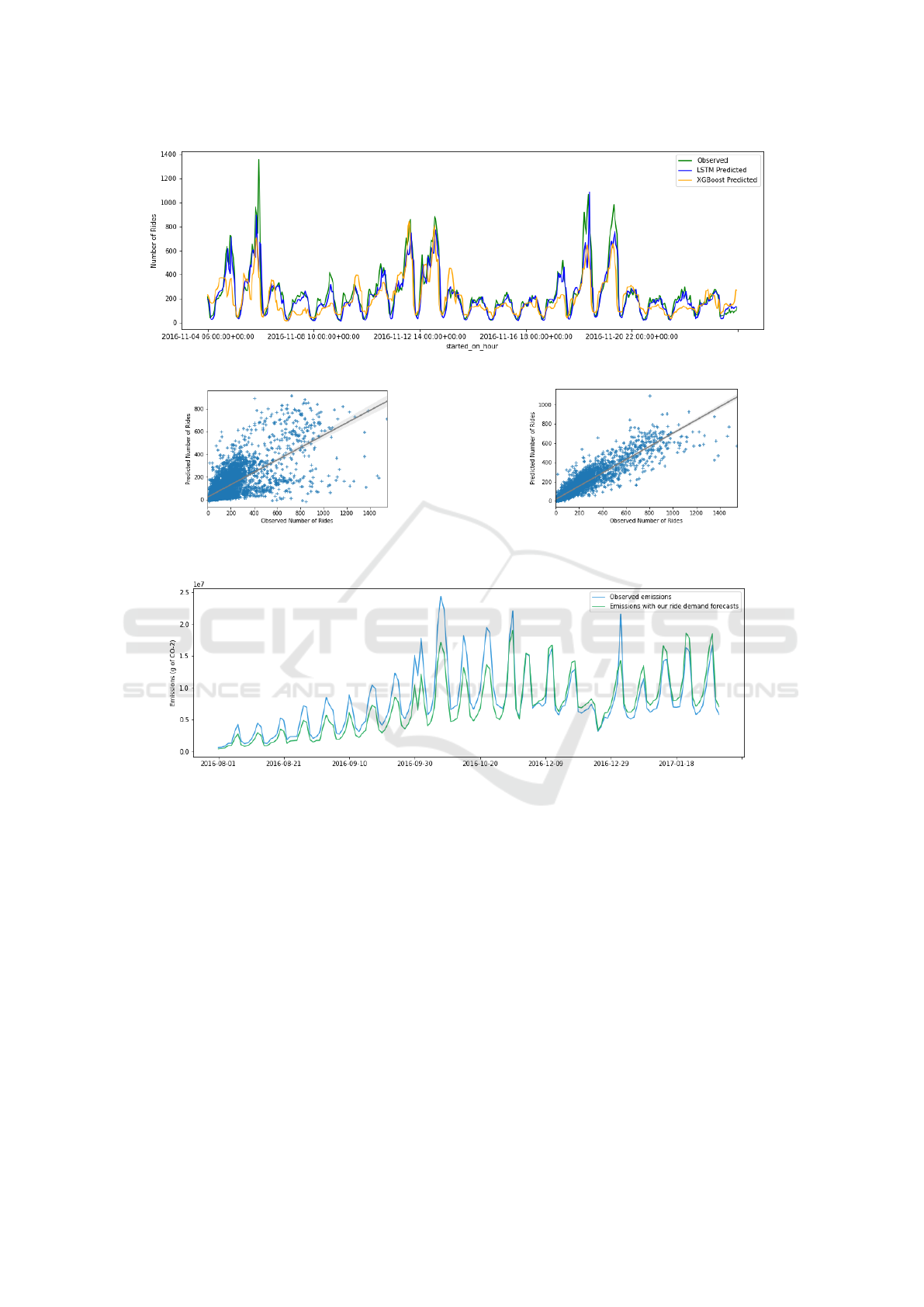
Figure 6: Comparison of ride demand forecasts (Nov ‘2016).
(a) XGBoost
(b) LSTM
Figure 7: Observed vs Predicted ride demand for the following hour.
Figure 8: Emissions reduction through our hourly ride demand forecast.
consequent rerouting of drivers to different geograph-
ical zones in a region has the ability to concretely
reduce deadheading emissions. We strongly believe
that such models could help TNCs reduce their car-
bon footprint in an inexpensive way. In addition to ex-
tending our work through more robust data, potential
future research efforts in this field include recording
driver activity in inter-ride periods to better estimate
deadheading and analyzing the impact of facilitating
dedicated parking spaces for ride-hailing drivers on
deadheading emissions. Furthermore, ride-level data
like that collected by Henao et al. (2019) can be
generalized to interpolate mode substitutions for un-
labeled ride data and thus concretely describe patterns
in ridership impacts.
ACKNOWLEDGEMENTS
This study used open data from: RideAustin, The
U.S. EPA, and World Weather Online. This study was
undertaken as part of the ProjectX Machine Learning
Research Competition hosted by the UofT AI organi-
zation at The University of Toronto. We thank Amin
Ghasemazar, University of British Columbia, for his
continued mentorship and feedback. We also thank
the members of the Cornell Data Science project team
for their support.
Ride-hailing Emissions Modeling and Reduction through Ride Demand Prediction
199

REFERENCES
Agency, U. E. P. (2012). Epa and nhtsa set standards to
reduce greenhouse gases and improve fuel economy
for model years 2017–2025 cars and light trucks.
Ahn, K. and Rakha, H. A. (2013). Network-wide impacts of
eco-routing strategies: a large-scale case study. Trans-
portation Research Part D: Transport and Environ-
ment, 25:119–130.
Centobelli, P., Cerchione, R., and Esposito, E. (2017).
Environmental sustainability in the service indus-
try of transportation and logistics service providers:
Systematic literature review and research directions.
Transportation Research Part D: Transport and Envi-
ronment, 53:454–470.
Chen, T. and Guestrin, C. (2016). Xgboost: A scalable
tree boosting system. In Proceedings of the 22nd
acm sigkdd international conf. on knowledge discov-
ery and data mining, pages 785–794.
Clewlow, R. R. and Mishra, G. S. (2017). Disruptive trans-
portation: The adoption, utilization, and impacts of
ride-hailing in the united states.
Cramer, J. and Krueger, A. B. (2016). Disruptive change
in the taxi business: The case of uber. American Eco-
nomic Review, 106(5):177–82.
DPU (2019). Massachusetts rideshare data report. Techni-
cal report, Department of Public Utilities (DPU), Mas-
sachusetts.
EPA, U. (2017). Vehicle fuel economy estimates, 1984-
2017. https://www.kaggle.com/epa/fuel-economy.
Accessed: 2020-10-02.
EPA, U. (2020). Greenhouse gas equivalences calcu-
lator. https://www.epa.gov/energy/greenhouse -gas-
equivalencies-calculator. Accessed: 2020-10-02.
Erhardt, G. D., Roy, S., Cooper, D., Sana, B., Chen, M.,
and Castiglione, J. (2019). Do transportation network
companies decrease or increase congestion? Science
advances, 5(5):eaau2670.
Feigon, S. and Murphy, C. (2016). Shared mobility and the
transformation of public transit. Number Project J-11,
Task 21.
Henao, A. and Marshall, W. E. (2019). The impact of
ride-hailing on vehicle miles traveled. Transportation,
46(6):2173–2194.
Ho, S. C., Szeto, W. Y., Kuo, Y.-H., Leung, J. M., Peter-
ing, M., and Tou, T. W. (2018). A survey of dial-a-
ride problems: Literature review and recent develop-
ments. Transportation Research Part B: Methodolog-
ical, 111:395–421.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Hockstad, L. and Hanel, L. (2018). Inventory of us green-
house gas emissions and sinks. Technical report, En-
vironmental System Science Data Infrastructure for a
Virtual Ecosystem.
Hou, Y., Garikapati, V., Sperling, J., Henao, A., and Young,
S. E. (2019). A deep learning approach for tnc trip
demand prediction considering spatial-temporal fea-
tures. Technical report, National Renewable Energy
Lab.(NREL), Golden, CO (United States).
Jin, G., Cui, Y., Zeng, L., Tang, H., Feng, Y., and Huang, J.
(2020a). Urban ride-hailing demand prediction with
multiple spatio-temporal information fusion network.
Transportation Research Part C: Emerging Technolo-
gies, 117:102665.
Jin, Y., Ye, X., Ye, Q., Wang, T., Chen, J., and Yan, X.
(2020b). Demand forecasting of online car-hailing
with stacking ensemble learning approach and large-
scale datasets. IEEE Access.
Ke, J., Yang, H., Zheng, H., Chen, X., Jia, Y., Gong, P.,
and Ye, J. (2018). Hexagon-based convolutional neu-
ral network for supply-demand forecasting of ride-
sourcing services. IEEE Transactions on Intelligent
Transportation Systems, 20(11):4160–4173.
Komanduri, A., Wafa, Z., Proussaloglou, K., and Jacobs, S.
(2018). Assessing the impact of app-based ride share
systems in an urban context: Findings from austin.
Transportation Research Record, 2672(7):34–46.
Kontou, E., Garikapati, V., and Hou, Y. (2020). Reducing
ridesourcing empty vehicle travel with future travel
demand prediction. Transportation Research Part C:
Emerging Technologies, 121:102826.
RideAustin (2017). Rideaustin data (2017). http://www.
rideaustin.com/.
Rousseeuw, P. J. (1987). Silhouettes: a graphical aid to
the interpretation and validation of cluster analysis.
Journal of computational and applied mathematics,
20:53–65.
Schaller, B. (2018). The new automobility: Lyft, uber and
the future of american cities.
Wang, C., Hou, Y., and Barth, M. (2019). Data-driven
multi-step demand prediction for ride-hailing services
using convolutional neural network. In Science and
Information Conference, pages 11–22. Springer.
Wang, H. and Yang, H. (2019). Ridesourcing systems: A
framework and review. Transportation Research Part
B: Methodological, 129:122–155.
Wenzel, T., Rames, C., Kontou, E., and Henao, A. (2019).
Travel and energy implications of ridesourcing ser-
vice in austin, texas. Transportation Research Part
D: Transport and Environment, 70:18–34.
WorldWeatherOnline (2020). Historical weather api. http:
//www.worldweatheronline.com/developer/api/.
VEHITS 2021 - 7th International Conference on Vehicle Technology and Intelligent Transport Systems
200
