
Efficient Flash Indexing for Time Series Data on Memory-constrained
Embedded Sensor Devices
Scott Fazackerley, Nadir Ould-Khessal and Ramon Lawrence
University of British Columbia, Kelowna, BC, Canada
Keywords:
Indexing, Database, Sensor Network, Embedded, Hashing, B-Tree, Bitmap.
Abstract:
Embedded sensor devices with limited hardware resources must efficiently collect environmental and indus-
trial time series data for analysis. Performing data analysis on the device requires data storage and indexing
that minimizes memory, I/O, and energy usage. This paper presents an index structure that is optimized for the
constrained use cases associated with sensor time series collection and analysis. By supporting only planned
queries and analysis patterns, the storage and indexing implementation is simplified, and outperforms general
techniques based on hashing and trees. The indexing technique is analyzed and compared with other indexing
approaches and is adapted to all flash memory types including memory that supports overwriting.
1 INTRODUCTION
There are numerous applications for embedded sys-
tems that perform data collection and analysis includ-
ing IoT devices (Adegbija et al., 2018; Al-Fuqaha
et al., 2015). An ongoing trend is to perform data
analysis on the data collection device as this enables
faster response times and reduces network transmis-
sions and energy usage. Data indexing for flash mem-
ory and solid state drives is a widely studied topic
(Fevgas et al., 2020). However, these generic data
structures based on hashing or trees are not always
applicable to time series indexing on sensor devices
(Qin et al., 2016) that have limited memory and query
processing capabilities.
The position articulated in this work is for index
structures optimized for application specific use cases
for embedded devices. The focus is on small mem-
ory embedded devices that use sensors to measure and
record environmental metrics, store data locally, and
perform queries for aggregation and event detection.
For this use case, the most important factors are ac-
curate and efficient storage of the sensed data, and
the ability to analyze and transmit this captured data.
Given the limited computational power of IoT hard-
ware (Gubbi et al., 2013), efficient use of memory
is critical, and algorithms must adapt to flash storage
specific constraints and performance characteristics.
The contribution of this paper is a data indexing
approach optimized for sensor embedded devices, and
a comparison with prior indexing algorithms. By fo-
cusing the index structure for the domain, the over-
all approach is simplified and results in higher per-
formance. The technique minimizes the number of
writes and the overhead in maintaining the index. A
theoretical analysis and comparison is performed and
demonstrates improvements over hashing and trees
that are typically used.
2 BACKGROUND
Indexing on flash memory is a widely studied area,
and a recent survey (Fevgas et al., 2020) overviews
prior work. Index data structures have been adapted to
the unique performance characteristics of flash mem-
ory such as different read and write times and the
erase-before-write constraint (i.e. no overwriting or
in-place writes). Common optimizations include min-
imizing the number of writes, performing sequential
writes where possible, and exploiting hardware spe-
cific parallelism.
Significant prior work has investigated index-
ing on solid state drives (SSDs) as SSDs improve
database server performance. Grid files (Fevgas and
Bozanis, 2015), hashing (Jin et al., 2020) and B-tree
variants (Kim and Lee, 2015; Kaiser et al., 2013;
Hardock et al., 2019) are used. Although SSDs use
flash memory, there are differences compared to in-
dexing on embedded flash devices. Besides the flash
memory chips, a SSD contains a CPU, memory, and
a flash translation layer (FTL) (Chung et al., 2009).
This hardware allows for I/O parallelism, and the
most recent algorithms focus on exploiting this par-
allelism. The FTL allows algorithms to write logical
pages and hides the complexities of the allocation and
garbage collection of physical pages on the device.
92
Fazackerley, S., Ould-Khessal, N. and Lawrence, R.
Efficient Flash Indexing for Time Series Data on Memory-constrained Embedded Sensor Devices.
DOI: 10.5220/0010318800920099
In Proceedings of the 10th International Conference on Sensor Networks (SENSORNETS 2021), pages 92-99
ISBN: 978-989-758-489-3
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The FTL also manages wear leveling. In a server en-
vironment, the amount of RAM used for buffering is
significant and allows algorithms to delay writes (via
logging or write deltas) to improve performance.
In comparison, a typical small-memory embed-
ded device may have between 4 KB and 32 KB of
SRAM memory, a processor running between 16 and
128 MHz, and flash storage consisting only of raw
flash memory chips. In this environment, SRAM is
the most precious commodity, and many approaches
designed for SSDs and large buffers are not applica-
ble. Further, with no FTL, the algorithm must manage
physical page allocation, garbage collection, and wear
leveling. An additional challenge with embedded de-
vices is that data needs to be moved to persistent stor-
age and not left in SRAM buffers in order to not lose
data as embedded devices have an increased risk of
unexpected reset or power cycling.
Serially accessible flash memories are increasing
in popularity for embedded devices as they require a
minimum number of dedicated I/O pins. Both NAND
and NOR flash are now commonly available in this
format at a low price point. Each category of flash
memory has its own unique attributes in terms of
read, write and data access constraints. Flash mem-
ory is constructed with memory cells aligned in pages,
which is the minimum write unit. Flash memory also
contain an internal page buffer which holds data to
be written to a page. Some devices maintain user ac-
cessible SRAM buffers to hold data but many mem-
ory devices obfuscate the internal buffer, requiring the
embedded device to manage page buffers in its lim-
ited internally available SRAM. With NAND flash,
data must be read from the flash memory to an inter-
nal buffer at a page level before being accessed by the
embedded device whereas many NOR memory candi-
dates support direct reads from a flash memory page.
Pages are grouped into sectors or blocks which
form the minimum erasable unit in the flash mem-
ory. Some NOR flash candidates support single page
erases with a higher energy and time cost. In gen-
eral, data cannot be updated in place with flash mem-
ory. Regardless of the flash memory architecture, de-
vices require erase-before-write and suffer degrada-
tion from increasing erase-write cycles which compli-
cates data management on embedded devices (Faza-
ckerley et al., 2016). Devices utilizing NAND flash
have the additional burden of dealing with the require-
ment for ECC as NAND flash is prone to bit errors,
while this is not required with NOR flash.
Data processing systems for embedded devices
such as Antelope (Tsiftes and Dunkels, 2011) and Lit-
tleD (Douglas and Lawrence, 2014) store and pro-
cess data locally, which differs from sensor network
databases like TinyDB (Madden et al., 2005) and
Cougar (Yao and Gehrke, 2002) where most analy-
sis is conducted after retrieving the data over the net-
work from the nodes. With specific focus on raw data
storage and indexing, Antelope (Tsiftes and Dunkels,
2011) supported multiple index types including an in-
line index that stored time series data in a sorted file
by timestamp. MicroHash (Zeinalipour-Yazti et al.,
2005) also used a sorted time series data file, and
built an index structure supporting queries by value
on top of it. The advantage of storing the data as a
sorted file is that variants of binary search can be used
to lookup any timestamp value or range. MicroHash
stored index pages intermixed with data pages. This
prevents a O(1) algorithm for timestamp lookup. The
value index consists of a directory of buckets, with
each bucket spanning a range of values. Each index
entry stores a page and offset of the record with that
value. Optimizations were performed to try to com-
pletely fill index pages and minimize the number of
index page writes.
PBFilter (Yin and Pucheral, 2012) minimized
memory usage by sequentially writing the data and
index structure. The index structure used Bloom fil-
ters to summarize page contents, and bitmap indexes
for handling range queries and key duplicates. PBFil-
ter outperforms tree and hashing techniques in terms
of memory usage and write efficiency.
B-trees are common and follow one of two general
approaches. Deferring writes can be done by buffer-
ing. Overwriting an existing page can be avoided by
logging changes either in another area on flash or in
special areas of the page itself (Kim and Lee, 2015).
Logging and write defer strategies rely on sufficient
memory to buffer modified pages so that multiple up-
dates can be batched together in one physical write.
Write-optimized trees (Bender et al., 2015) buffer
modifications and write them out in batches to amor-
tize the write cost and avoid small random writes.
Overwriting an existing page in flash memory is
allowed (Kaiser et al., 2013; Fazackerley et al., 2016;
Hardock et al., 2019) in certain cases. This allows for
different techniques for erase and write avoidance and
modifications of data structures to improve the per-
formance of some techniques. There are challenges
related to error correction and the type of writes that
support overwriting for NAND flash memory.
3 PROBLEM DEFINITION
An embedded device performs a fixed set of data op-
erations, unlike a general database server. When the
device is designed and deployed, these data process-
Efficient Flash Indexing for Time Series Data on Memory-constrained Embedded Sensor Devices
93

ing operations will be known and implemented in the
code base. By exploiting this knowledge, it is possi-
ble to build more implementation-specific optimized
index structures.
The data set is an append only time series where
each entry consists of a timestamp and one or more
sensor values. A sensor value is produced by read-
ing from a sensor connected to the embedded device,
and is an integer of size between 8 and 32 bits. When
reading using an analog-to-digital converter, the raw
sensor value is then converted into an actual value
based on a sensor specific transfer function. In many
cases the value produced is a floating point value.
Processing and storing floating point values on many
small embedded devices increases device overhead
due to architectural limitations. Using the value in
its discrete raw form instead of the converted value is
more efficient.
The embedded device has these properties:
• Memory-constrained (4 KB to 128 KB)
• Flash memory storage (may be NOR or NAND)
• May have either raw or FTL-based memory
• Flash memory may support page-level overwrit-
ing and/or byte-level direct reads.
The embedded environment characteristics are known
and available to the algorithm including:
• The number of sensors and the frequency of sen-
sor measurements
• The size of the flash memory available to be used
and its characteristics
• The data processing requirements including
queries, sliding window aggregation, and consis-
tency requirements
• Append only data with increasing timestamps
For consistency requirements, the system must sup-
port both page level and record level consistency. The
types of queries supported include:
• Equality and range timestamp queries
• Equality and range value queries (but may be re-
stricted to certain value ranges of interest)
These requirements are reasonable given that sen-
sor devices are developed, configured, and deployed
with specific use cases and require efficient and reli-
able operation for extended periods of time.
4 INDEXING APPROACH
The proposed indexing approach minimizes writes
and memory usage. The index structure adapts to
the known query requirements and optimizes for the
queries specifically required for a particular use case.
4.1 Data Record Storage
The foundation of the approach is that time series
data records are written sequentially in pages to flash.
This is similar to MicroHash (Zeinalipour-Yazti et al.,
2005) except that all data pages are contiguous, and
are not intermixed with index pages.
Storing data pages contiguously works regardless
if the flash has an FTL or supports overwrites. If the
flash memory has an FTL, then all writes are logical
writes and all physical allocations are hidden. If the
flash does not have an FTL, there are several imple-
mentation possibilities:
• Page level consistency - buffer page in memory
and only write out full pages to flash
• Record level consistency:
– Overwrites supported - append record to end of
page using overwrites
– No overwrites supported - write page to free
space at end of memory region temporarily,
when page is full, write to end of data area
The ability to store the data records in sequen-
tial order by timestamp enables efficient timestamp
searches and minimizes the number of writes.
4.2 Design Optimized Value Indexing
Supporting value based queries efficiently requires
adding an index structure on top of the raw data stor-
age. Without an index, a query on a data value re-
quires a sequential scan of all data pages.
The design decision is to deploy indexes based
on the types of queries that will be required by the
embedded device application. Since the device will
not be executing interactive queries, these queries are
known during design time. The queries generally fall
in two categories:
• Point and range outlier value detection - value ≥V
or value ≤ V for some value V
• Recent history sliding window aggregates - for the
most recent T time units, return the average, max,
min, or count of value(s)
A key observation is that the integer values of-
ten have a limited domain (e.g. 10 bits) and demon-
strate skew and temporal locality. For example, a sen-
sor collecting temperature data will have the values
change relatively slowly with a regular trend.
SENSORNETS 2021 - 10th International Conference on Sensor Networks
94
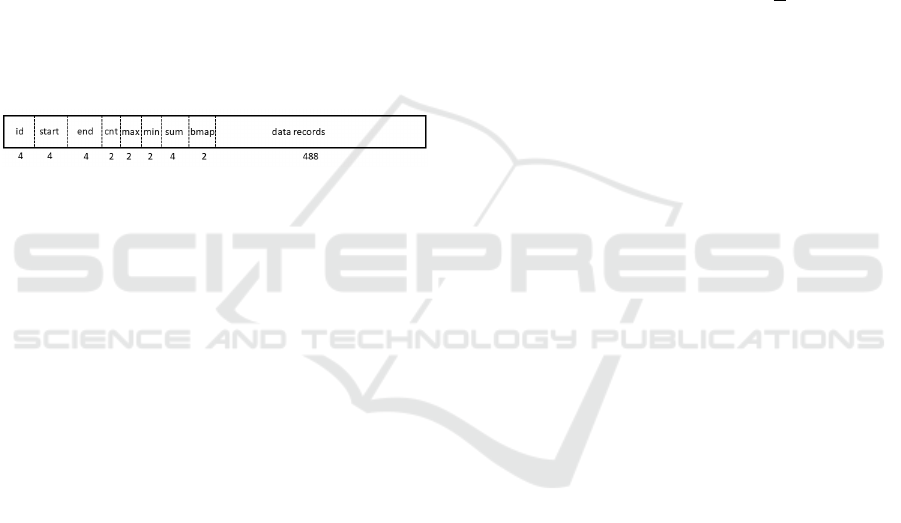
To support efficient aggregate queries, each data
page header contains the smallest and largest times-
tamp values, the count of the number of records, the
minimum and maximum values in the page, and the
sum of all values in the page. The page header also
stores a small bitmap index that approximates the data
distribution. The size of the bit vector is determined
based on design requirements. Each bit represents the
presence of a value in the particular range with ranges
being user defined.
An example page structure that uses 2 byte val-
ues is in Figure 1. The page structure used for any
particular time series data set depends on the queries
that must be supported. The only required fields are
the 4 byte page id and 2 byte count. The time series
range, aggregate summary and bitmap are optional.
The overhead is about 24 bytes or 4.5% of a 512 byte
page. To support multiple different values, the aggre-
gate summary and bitmap is repeated for each value
in the sensor record.
Figure 1: Page Structure.
The bitmap is designed based on query require-
ments. For example, consider a value range of 0 to
100. One possible bit vector may divide the range
into 10 equal buckets (0-9, 10-19, ..., 90-100) and re-
quire 10 bits of storage. If the values of interest are
not equally distributed, the bit vector can be defined
to capture the data of most importance. For example,
if the analysis queries are looking for very small or
very large data values, it may be better to use only 4
bits with the ranges (0-9, 10-49, 50-89, 90-100). At
the limit, a single bit indicator can be used to deter-
mine a range of interest. For example, if the queries
are focused on only values ≥ V , then 1 bit is used and
is set only if the page contains values ≥ V .
Database index tuning is commonly performed
in database systems, but varying an embedded in-
dex structure based on the required data analysis is
unique. The bit vector filter in the header is config-
ured based on design specifications and only requires
some additional space in each page. No additional
I/Os are required. However, by itself it does not sig-
nificantly improve query performance or reduce I/Os,
as unless direct byte reads are supported, the system
still must read the entire page from flash (although the
bit vector does save time in processing records in the
page once it is read).
The bit vector for each page is also written out
to an index area in a separate area of the flash mem-
ory. Thus, index pages will not be intermixed with
data pages. One buffer is used to store the latest index
page, and it is only written out when full. Given that
a typical bit vector size per page is between 4 and 16
bits, for a 512 byte page, the index size overhead and
additional I/Os is between 0.1 and 0.4%.
4.3 Querying by Timestamp
The pages are ordered by timestamp, and any times-
tamp can be retrieved in O(1) reads by calculat-
ing an offset using the start timestamp, the query
timestamp, and the rate at which records are writ-
ten to flash (based on sampling rate and number of
records/block). A given query timestamp t
q
can be
located by calculating its page index:
page index = (t
q
−t
s
) ∗
r
B
(1)
The first timestamp value is t
s
, and r is the sam-
pling rate in records/second with B as the number of
records/page. The page index is converted to a physi-
cal offset by multiplying by the page size in bytes.
Since the memory is treated as a circular storage,
after the data fills the memory for the first time, it is
necessary to wrap the offset value based on the current
physical offset of the first data page in memory.
For example, assume that the memory can store up
to 100 data pages, and the data has wrapped around
such that the current first data page is at offset 50. If
the page index is calculated as 75, then the physical
page offset is (50 + 75) mod 100 = 25.
4.4 Querying by Value
For queries by value of the form v
1
≤ value ≤ v
2
,
query performance depends on the selectivity of the
query predicate, s, and the ability to capture that se-
lectivity in the bitmap index. Every index based query
must read the entire index, which costs approximately
0.001 ∗ N where N is the number of data pages. This
is a sequential read and requires only one buffer for
the current index page.
If the query predicate selectivity is s, then on aver-
age s ∗ N data pages will be read to process the query.
The actual number of page reads depends on how the
records matching the query predicate are distributed
across the pages. If the query predicate exactly aligns
with the bitmap vector such that no false positives
are generated, then the algorithm will read the min-
imum number of data pages required and is optimal.
Since the indexes can be constructed to support spe-
cific queries, it is possible to get perfect matching and
no false positives subject to space limitations. The
algorithm for index querying by value is in Figure 2.
When comparing the index and query bitmap, the
two bit vectors can be combined with logical AND,
Efficient Flash Indexing for Time Series Data on Memory-constrained Embedded Sensor Devices
95

Convert query predicate into query bitmap
Let P = 0 be the current data page index
for each index page
for each index record
if index bitmap AND query bitmap > 0
read data page for this index record
for each record in data page
output record if predicate is true
Figure 2: Querying by Value Range.
and any value greater than 0 (i.e. any bit set) indicates
that the data page should be read.
The overall cost of the algorithm is the cost to
read the index pages and any data pages that contain
records that match the predicate. If the bitmap index
supports the query predicate precisely, the minimum
number of data pages, s ∗ N, are read.
As an example, consider a query for value >= 90.
In the previous section, two possible bitmaps were de-
fined one with 10 bits and the other with 4 bits. In ei-
ther case, the last bit in the vector, matches the pred-
icate exactly, and only pages with records that match
the predicate will be read. On the other hand, if the
query is 25 ≤ value ≤ 75, then both bitmaps will re-
turn false positives. The 10 bit vector will have fewer
false positives as its value ranges have finer granular-
ity and better overlap with the query predicate.
The other common query is sliding window sum-
maries. The page-level aggregate summaries support
aggregate calculations without processing the data
records, and the filtering of rows by examining the
minimum and maximum data range. Using the header
summary is especially useful if the memory supports
byte level or partial page reads so only the header in-
formation is read rather than the entire page.
In most use cases, the query will not scan the en-
tire data set but only the last few pages which rep-
resent the latest data in the sliding window. Given
sufficient memory, previous data pages are obvious
choices for buffering in RAM. If the number of pages
in the sliding window is small, then it is more efficient
to read the pages rather than building another index of
the summary values.
4.5 Memory Management
The minimum memory requirement is one write
buffer for the current data page and a read buffer to
read the data records. The addition of the bitmap in-
dex requires an additional write buffer for the index,
and a read buffer when processing index queries. Any
additional memory available would be used to buffer
the most recent data pages, if the system uses sliding
window queries on recent data. Thus, the minimum
memory requirement is 2 buffers without bitmap in-
dexing and 4 buffers with bitmap indexing.
4.6 Handling Variability
Design and operational parameters may change
throughout the life of an embedded sensor device.
These changes include adding or removing sensors,
modifying the frequency of sensor readings, and
adapting the queries performed on the device.
The approach easily handles changes in the sen-
sors and their sampling frequency. These changes
only impact querying by timestamp, as timestamp
record locations are calculated based on sampling fre-
quency and records per page. These parameters are
known at any given time, and if they change during
run-time, the system must only store a history of pre-
vious values and the time when the change occurred.
For example, consider that the system has already
stored 50 data pages with the frequency r as 10 sam-
ples/hour and B = 10. If r is changed to 20 sam-
ples/hour, then the system must record that starting
at page offset 50, r is 20. To calculate the page index
for a time 120 hours from the first timestamp:
page index = 50 ∗
10
10
+ (120 − 50) ∗
20
10
= 190 (2)
Thus, given knowledge of past sampling rates, cal-
culating the page index remains straightforward. Sup-
porting different bit vector indexing strategies is also
possible by recording the page indexes when the bit
vector structure was changed.
4.7 Wear Leveling
Wear leveling is performed by treating the mem-
ory as a circular array and wrapping around to the
front of the memory region using a modified Fron-
tier Advance Wear Leveling approach (FAWL). Fig-
ure 3 shows the layout of memory for wear leveling.
Pages are written to the location tracked by the page
write frontier. In advance of the page write frontier,
the system maintains a region of erased pages (write
frontier extent) that allows pages to be written to the
device. The temporary write extent is located in front
of the write extent and is used as temporary record
level storage. The size of the temporary write extent
is a multiple of the memory device’s minimum erase
unit and is aligned on a sector erase boundary. Gen-
eral sector erases are performed at the sweep frontier
in front of the active data extents.
SENSORNETS 2021 - 10th International Conference on Sensor Networks
96
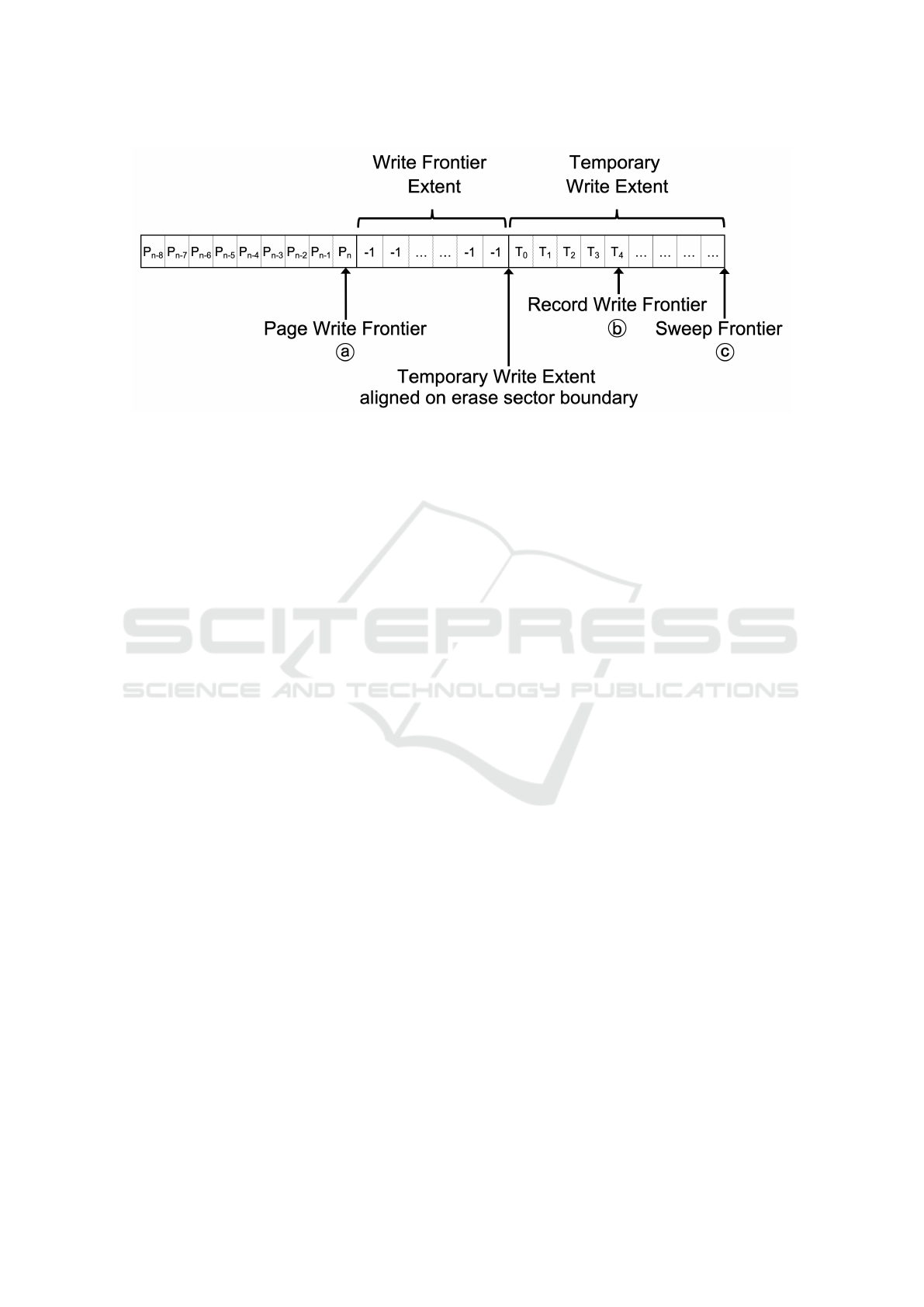
Figure 3: Frontier Advance Wear Leveling.
If page level consistency is used, complete pages
will be written to the page at the page write fron-
tier (
A
). The system assigns an increasing page id
to each page written (P
n
) which is used to track the
age of pages in the system. If record level consistency
is being used, record updates will be written to pages
(T
n
) inside the temporary write extent at the record
write frontier (
B
). When enough records have been
written to the temporary write extent to fill a page, the
full page is then written to the page write frontier.
As pages are written to the system and the page
write frontier advances towards the temporary write
extent boundary, the temporary write extent will be
advanced to the next sector of free pages. The sys-
tem will erase the sector tracked by the sweep frontier
(
C
), advance the temporary write extent and record
write frontier to the position of the sweep frontier,
and the sweep frontier will then be advanced to the
next sector that will be targeted for erase. The stale
temporary write extent will then be erased. The write
frontier extent will then be updated to include this re-
claimed area.
As FAWL guarantees that the timestamp records
are written to the memory in a linearly increas-
ing fashion, the sweep frontier will always reclaim
the oldest records in the system. Additionally, it
wears memory uniformly by writing and erasing se-
quentially, eliminating the need for a complex block
write/erase management scheme or FTL.
The system records the current page index for the
start and end of the valid data pages. Preferably, this
information is stored in non-volatile memory in case
of system failure. Otherwise it is recoverable by scan-
ning the memory. The first data page has the smallest
page id, and the last data page has the largest.
5 ANALYSIS
The sequential bitmap indexing for time series tech-
nique, referred to as SBITS, is compared to other in-
dexing approaches for embedded systems. A sum-
mary of the approaches is in Table 1.
The inline index developed for Antelope stored
data records in increasing order by timestamp.
Searching by timestamp used binary search, but
searching by value is not supported. The minimum
memory is 2 pages (one write buffer for data records
and one read buffer for queries). This index structure
has low overhead, but does not also support efficient
value queries.
The closest comparable strategy is MicroHash that
has a sequential data file intermixed with index pages.
Each index page stored index records for a particu-
lar data value. The minimum memory requirement
for MicroHash was 6 pages (write buffer for data,
write buffer for index, 2 read buffers (index and data),
buffer for directory index, and buffer for root block).
MicroHash also uses buffers for caching index pages.
The MicroHash index size varies between 10%
and 50% of the data size and depends on the size of
the data records, the variability in the data, and the
amount of memory available to cache index blocks.
By intermixing data pages and index pages, a modi-
fied binary search was required in MicroHash, which
on average required about 5 reads for the data sets
tested. Further, the index consumed more space as the
index records are larger and could not always com-
pletely fill the pages. This is due to MicroHash using
in-memory hash partitioning of the data values in the
index and being forced to flush an index page to stor-
age whenever space must be freed up.
The key difference and limitation of MicroHash
Efficient Flash Indexing for Time Series Data on Memory-constrained Embedded Sensor Devices
97
Table 1: Comparative Analysis.
Algorithm Index Size Min. Memory Timestamp Query I/Os Value Query I/Os
SBITS 0.004 ∗ N 2 to 4 1 0.004 ∗ N + s ∗ N
Antelope index 0 2 O(log
2
N) N/A
MicroHash 0.1 ∗ N to 0.5 ∗ N 6 5 0.1 ∗ N + s ∗ N
PBFilter
B∗N
I
+
N
F
4 O(log
2
N)
N
F
+ s ∗ N
B-tree
B∗N
k
5 N/A O(log
k
N)+ s ∗ N
Linear hash
B∗N
I
3 N/A O(1) (point query)
compared to SBITS is that index records based on off-
sets consume more space than the bitmap index, and
more importantly, good performance is only achiev-
able if you can buffer one page for each bucket in the
hash table. If the hash table has 4 buckets, then that
would require 4 in-memory buffers. In some data sets
with low variability, it is possible to have fewer mem-
ory buffers, but this causes issues with only partially
filled pages. The write cost using this index tech-
nique is considerably higher. When reading, more
buffers are required for range queries as each bucket
that intersects the query range needs a buffer in order
to make sure the data file is not read multiple times.
PBFilter writes data and index pages sequentially
and uses bloom filters and bitmaps for data sum-
maries. PBFilter requires at least 4 memory buffers
and has more writes as it has both a record-level in-
dex and index summaries. The index size consists of
the space used to store an index entry for each data
record (where I is number of index entries that fit in
a page) plus space used to store the summary of each
data page (where F is number of bloom filters that fit
in a page). Given that an index record size may be
near the same size as a data record (i.e. 12 bytes), the
index size may be as large as the data size. PBFilter
does not discuss timestamp based queries on the data
file, but given that the data is written sequentially bi-
nary search is possible. Value queries require reading
the summary index and then any matching data pages.
Compared to SBITS, PBFilter uses more memory and
requires more space and writes to maintain the index.
B-tree implementations on embedded devices are
restricted on RAM so techniques based on extensive
buffering are not applicable. A B+-tree storage struc-
ture will allow for efficient queries on either the times-
tamp or value but not both. Assuming the data is
stored sequentially by timestamp, then the B+-tree is
built on value. If the number of index records per page
is k, search and insert is O(log
k
N). Buffers required
are 2 for data (read and write) and 2 for B+-tree (min-
imum of 2 for supporting split). To use any form of
log buffering, additional buffers are required. At min-
imum, a write buffer is required for log records. LSB-
tree (Kim and Lee, 2015) is executable on memory-
constrained devices as it uses a single log area to sup-
port updates and requires only one additional buffer
for the log file. However, it generates more writes
and has costly re-organization operations to rebuild
the tree periodically. Query performance and index
size depends on k . B+-tree implementations are not
optimized for append only time series data.
Linear hash implemented on embedded devices
(Feltham et al., 2019) supports key based lookup in
constant time. The minimum memory usage is 3
buffers, but better performance requires a buffer per
hash partition otherwise every insert requires a page
to be read from memory and then written with the
new data record. Timestamp based queries and range
queries on value are not supported.
Overall, the fundamental position taken is that the
index structure can be adapted at design time given
that the queries to be supported will be known in ad-
vance. With append only time series data and known
query patterns, SBITS minimizes I/Os and energy us-
age by building the minimal possible index to support
the required queries. The number of writes is mini-
mized, and the index size is less than 1% of the data
size. Queries on timestamp require only 1 read, and
value queries will read the minimum amount of data
if the bitmap index is tuned to match query predicates.
6 FUTURE WORK AND
CONCLUSIONS
Efficient data storage and indexing in embedded sys-
tems is critical as these systems collect and process
more data. This work presented the SBITS approach
that is optimized for append only, time series data
sets. An important insight is that embedded systems
typically do not process general queries, and knowl-
edge of data analysis requirements allows for the in-
dex structure to be more efficient. The approach was
compared with other indexing approaches using hash-
ing and trees and shown to minimize memory us-
age while allowing for highly efficient timestamp and
value queries. Future work will experimentally eval-
uate the approach on various hardware systems.
SENSORNETS 2021 - 10th International Conference on Sensor Networks
98

REFERENCES
Adegbija, T., Rogacs, A., Patel, C., and Gordon-Ross, A.
(2018). Microprocessor Optimizations for the Internet
of Things: A Survey. IEEE Trans. Comput. Aided
Des. Integr. Circuits Syst., 37(1):7–20.
Al-Fuqaha, A., Guizani, M., Mohammadi, M., Aledhari,
M., and Ayyash, M. (2015). Internet of Things: A
Survey on Enabling Technologies, Protocols, and Ap-
plications. IEEE Communications Surveys - Tutorials,
17(4):2347–2376.
Bender, M. A., Farach-Colton, M., Jannen, W., Johnson, R.,
Kuszmaul, B. C., Porter, D. E., Yuan, J., and Zhan,
Y. (2015). An Introduction to Bε-trees and Write-
Optimization. Usenix Mag., 40(5).
Chung, T.-S., Park, D.-J., Park, S., Lee, D.-H., Lee, S.-W.,
and Song, H.-J. (2009). A survey of flash translation
layer. Journal of Systems Architecture, 55(5):332 –
343.
Douglas, G. and Lawrence, R. (2014). LittleD: a SQL
database for sensor nodes and embedded applications.
In Symposium on Applied Computing, pages 827–832.
Fazackerley, S., Penson, W., and Lawrence, R. (2016).
Write improvement strategies for serial NOR dataflash
memory. In 2016 IEEE Canadian Conference
on Electrical and Computer Engineering (CCECE),
pages 1–6.
Feltham, A., Ould-Khessal, N., MacBeth, S., Fazackerley,
S., and Lawrence, R. (2019). Linear Hashing Imple-
mentations for Flash Memory. In 21st International
Conference Enterprise Information Systems Selected
Papers, volume 378 of Lecture Notes in Business In-
formation Processing, pages 386–405. Springer.
Fevgas, A., Akritidis, L., Bozanis, P., and Manolopoulos,
Y. (2020). Indexing in flash storage devices: a survey
on challenges, current approaches, and future trends.
VLDB J., 29(1):273–311.
Fevgas, A. and Bozanis, P. (2015). Grid-File: Towards to a
Flash Efficient Multi-dimensional Index. In Database
and Expert Systems Applications, pages 285–294.
Springer.
Gubbi, J., Buyya, R., Marusic, S., and Palaniswami, M.
(2013). Internet of Things (IoT): A vision, architec-
tural elements, and future directions. Future Gener.
Comput. Syst., 29(7):1645–1660.
Hardock, S., Koch, A., Vinc¸on, T., and Petrov, I. (2019).
IPA-IDX: In-Place Appends for B-Tree Indices. In
15th International Workshop on Data Management,
pages 18:1–18:3. ACM.
Jin, P., Yang, C., Wang, X., Yue, L., and Zhang, D. (2020).
SAL-Hashing: A Self-Adaptive Linear Hashing Index
for SSDs. IEEE Trans. Knowl. Data Eng., 32(3):519–
532.
Kaiser, J., Margaglia, F., and Brinkmann, A. (2013). Ex-
tending SSD lifetime in database applications with
page overwrites. In 6th Annual International Systems
and Storage Conference, pages 11:1–11:12. ACM.
Kim, B. and Lee, D. (2015). LSB-Tree: a log-structured
B-Tree index structure for NAND flash SSDs. Des.
Autom. Embed. Syst., 19(1-2):77–100.
Madden, S., Franklin, M. J., Hellerstein, J. M., and Hong,
W. (2005). TinyDB: an acquisitional query processing
system for sensor networks. ACM Trans. Database
Syst., 30(1):122–173.
Qin, Y., Sheng, Q. Z., Falkner, N. J., Dustdar, S., Wang, H.,
and Vasilakos, A. V. (2016). When things matter: A
survey on data-centric internet of things. Journal of
Network and Computer Applications, 64:137 – 153.
Tsiftes, N. and Dunkels, A. (2011). A database in every
sensor. In Proceedings of the 9th ACM Conference
on Embedded Networked Sensor Systems, SenSys ’11,
page 316–332, New York, NY, USA. Association for
Computing Machinery.
Yao, Y. and Gehrke, J. (2002). The Cougar Approach to In-
Network Query Processing in Sensor Networks. SIG-
MOD Rec., 31(3):9–18.
Yin, S. and Pucheral, P. (2012). PBFilter: A flash-based
indexing scheme for embedded systems. Information
Systems, 37(7):634 – 653.
Zeinalipour-Yazti, D., Lin, S., Kalogeraki, V., Gunopulos,
D., and Najjar, W. (Dec 13, 2005). MicroHash: An
Efficient Index Structure for Flash-Based Sensor De-
vices. In Proceedings of the FAST ’05 Conference on
File and Storage Technologies, pages 31–43. USENIX
Association.
Efficient Flash Indexing for Time Series Data on Memory-constrained Embedded Sensor Devices
99
