Analysis of Feature Representations
for Anomalous Sound Detection
Robert M
¨
uller
a
, Steffen Illium
b
, Fabian Ritz
c
and Kyrill Schmid
d
Mobile and Distributed Systems Group, LMU Munich, Germany
Keywords:
Anomaly Detection, Transfer Learning, Machine Health Monitoring.
Abstract:
In this work, we thoroughly evaluate the efficacy of pretrained neural networks as feature extractors for anoma-
lous sound detection. In doing so, we leverage the knowledge that is contained in these neural networks to
extract semantically rich features (representations) that serve as input to a Gaussian Mixture Model which is
used as a density estimator to model normality. We compare feature extractors that were trained on data from
various domains, namely: images, environmental sounds and music. Our approach is evaluated on recordings
from factory machinery such as valves, pumps, sliders and fans. All of the evaluated representations outper-
form the autoencoder baseline with music based representations yielding the best performance in most cases.
These results challenge the common assumption that closely matching the domain of the feature extractor and
the downstream task results in better downstream task performance.
1 INTRODUCTION
In the emerging field of anomalous sound detection
(ASD), one aims to develop computational meth-
ods to reliably detect anomalies in acoustic sounds.
These methods can be considered as the counterpart
to anomaly detection on visual data and are used in
situations where visual monitoring is infeasible. One
of the most important use-cases is the early detection
of malfunctions during the operation of factory ma-
chinery. A robust ASD system reduces repair costs,
improves safety and prevents consequential damages
by enabling early maintenance. Moreover, it reduces
the financial burden, an aspect that becomes increas-
ingly important considering the rising costs of modern
machinery and equipment.
While our work focuses on the scenario above,
other ASD systems have been developed for closely
related applications such as monitoring production
processes for irregularities (Hasan et al., 2018), the
detection of leaks in water supply networks (M
¨
uller
et al., 2020a) and sound-based security systems for
public spaces (Hayashi et al., 2018).
Since it is expensive and tedious to collect an
a
https://orcid.org/0000-0003-3108-713X
b
https://orcid.org/0000-0003-0021-436X
c
https://orcid.org/0000-0001-7707-1358
d
https://orcid.org/0000-0001-6748-4896
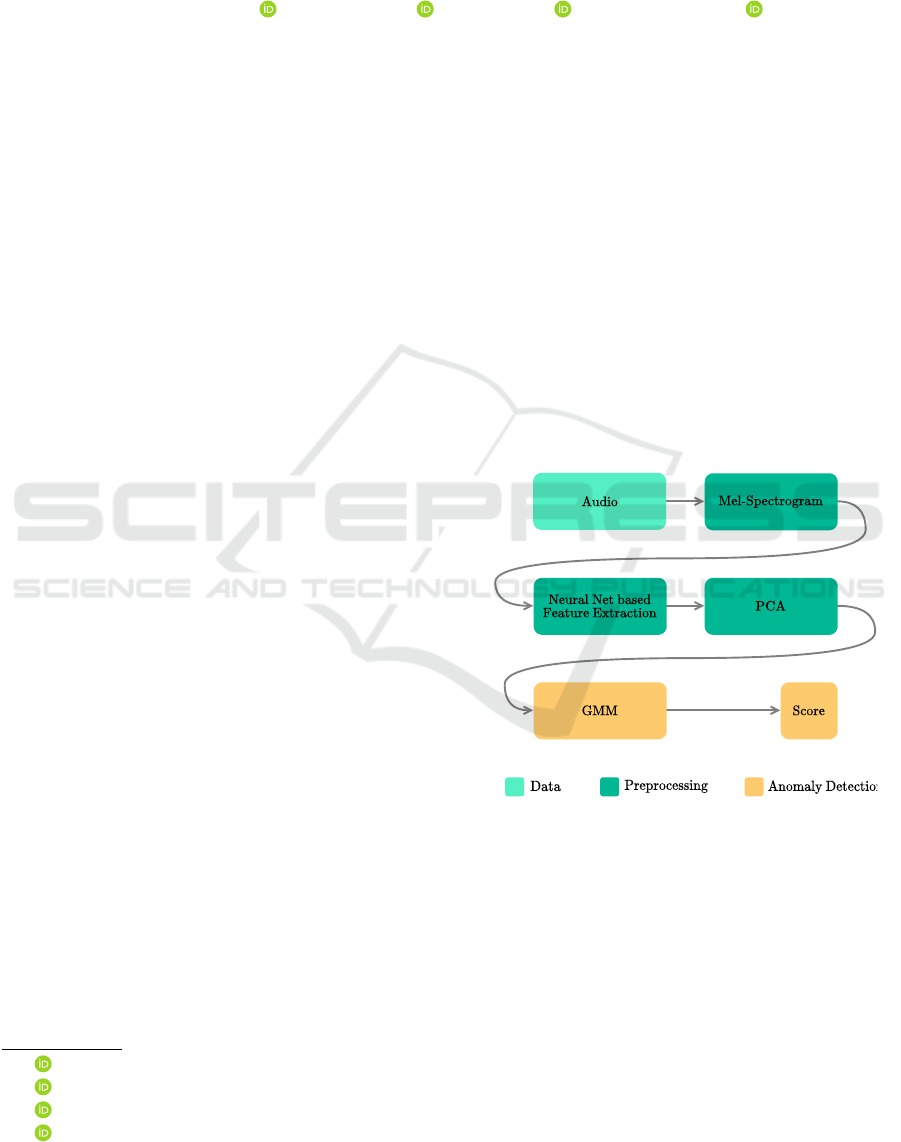
Figure 1: High-Level overview of the proposed workflow.
exhaustive number of anomalous samples that cover
all possible anomalies in such settings, training ASD
models is usually carried out on normal operation data
only to learn a notion of normality. Moreover, even if
it was possible to collect large amounts of anomalous
data, some anomalies might not even be known be-
forehand and are thus not available during training.
Most of the recent ASD approaches rely on deep
autoencoders (AEs). AEs first compress their in-
put into a low dimensional latent code using an en-
coder neural network (NN). This code is subsequently
used to reconstruct the input with a decoder network.
Hence, AEs do not use external labels. It is assumed
Müller, R., Illium, S., Ritz, F. and Schmid, K.
Analysis of Feature Representations for Anomalous Sound Detection.
DOI: 10.5220/0010226800970106
In Proceedings of the 13th International Conference on Agents and Artificial Intelligence (ICAART 2021) - Volume 2, pages 97-106
ISBN: 978-989-758-484-8
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
97

that patterns seen during training yield a lower re-
construction error than those not seen during train-
ing. Consequently the reconstruction error is used as a
measure of abnormality. However, AEs proposed for
ASD have to be trained from scratch and do not use
prior information or leverage additional training data
from other domains. Due to the widespread avail-
ability of acoustic datasets and NNs that were trained
on related tasks such as environmental sound clas-
sification, the question arises whether their knowl-
edge, obtained from tasks for which a large amount
of data is available, can be transferred and exploited
to increase ASD performance. This approach is com-
monly referred to as Transfer Learning.
Transfer learning is mainly used in computer vi-
sion and natural language processing (NLP) but has
also started to gain traction in acoustic signal process-
ing.
In computer vision, it is common to fine-tune a
neural network that was pre-trained on ImageNet for
the task of image classification e.g. by only chang-
ing some of the last layers and fine-tuning the net-
work on a downstream task. Another approach is to
extract some of the activations (e.g. from the penul-
timate dense layer) of the pretrained network and use
them as feature vectors that serve as input to more
traditional (e.g. shallow, linear) models. Note that in
this case the pretrained network is solely used as fea-
ture extractor and its weights are not updated through
gradient descent. In both cases, transfer learning con-
siderably reduces the amount of training data needed
for the downstream task (Donahue et al., 2014).
In NLP, the advent of pretrained language mod-
els has lead to substantial improvements on a wide
range of tasks (Ruder, 2018). Almost all modern
approaches rely on some sort of pretrained (word)
representations or networks. Recent approaches are
trained on (masked) language modeling and use trans-
former (Devlin et al., 2019) or recurrent neural net-
work architectures (Peters et al., 2018). In the first
stage the models are trained to solve the very general
task of understanding natural language. Afterwards
the NNs are fine-tuned or simply used as feature ex-
tractors to solve tasks such as sentiment analysis and
machine translation.
Finally, there exist several pretrained networks
from the field of acoustic signal processing. For ex-
ample, (Chi et al., 2020) use a transformer based
architecture to predict masked Mel-spectrogram
frames to obtain contextualized speech representa-
tions. (Beckmann et al., 2019) adopt the classic VGG-
16 architecture on a spoken word classification task
to obtain transferable representations. (Cramer et al.,
2019) propose a self-supervised audio-visual corre-
spondence task and use the resulting features in con-
junction with a simple two layer neural network to
achieve state-of-the-art performance for environmen-
tal sound classification.
Despite of their easy availability, these networks
are rarely used in other work i.e. most models are
trained from scratch and the possible benefits that the
inclusion of pretrained NNs could provide are ne-
glected.
In this work, we aim to evaluate the effectiveness
of transferring knowledge from related domains us-
ing different pretrained NNs for the task of anomalous
sound detection. Since no labels are available in ASD,
we follow the feature extraction paradigm in conjunc-
tion with a Gaussian Mixture Model (GMM). We hy-
pothesize that using the right representation in con-
junction with a simple anomaly detection algorithm
rivals the performance of the currently widely used
autoencoder. We evaluate our approach with repre-
sentations from three different domains chosen due
to their structural similarity with machine sounds: (i)
Image based representations (ii) Environmental sound
based representations (iii) Music based representa-
tions. From a practical point of view, this approach
allows for fast experiments as only shallow models
have to be trained and alleviates the burden of design-
ing a suitable neural network architecture and training
task.
We show that all representations outperform the
autoencoder baseline (Kawaguchi et al., 2019) in
terms of ASD performance. The best results are ob-
tained with music based representations. To the best
of our knowledge, this is the first study that thor-
oughly evaluates the efficacy of different feature rep-
resentations for anomalous sound detection.
The rest of the paper is structured as follows: In
Section 2 we briefly review related work followed by
a discussion of our ASD approach in Section 3. Then
we go on to describe the experimental setup and the
dataset we used to evaluate our approach in Section 4.
The results are discussed in Section 5. We close by
summarizing our findings and outlining future work
in Section 6.
2 RELATED WORK
As stated before, the majority of approaches to
anomalous sound detection uses deep autoencoders.
(Duman et al., 2019) use a convolutional AE to recon-
struct Mel-spectrograms in order to detect anomalies
in industrial plants. (Koizumi et al., 2017) concate-
nate several spectrogram frames as input to a simple,
densly connected autoencoder. Here ASD is consid-
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
98

ered as a statistical hypothesis test where they pro-
pose a loss function based on the Neyman-Pearson
lemma. However this approach relies on the simula-
tion of anomalous sounds using expensive rejection
sampling. (Suefusa et al., 2020) use a similar AE
architecture to predict the center frame from the re-
maining frames. This is based upon the observation
that the edge frames are usually harder to reconstruct,
especially when dealing with non-stationary sounds.
(Marchi et al., 2015; Bayram et al., 2020) account
for the sequential nature of sound and use sequence-
to-sequence network architectures to reconstruct au-
ditory spectral features.
A slightly different approach is taken
by (Kawaguchi et al., 2019). Here an ensemble
of simple autoencoders is used for ASD. Various
acoustic front-end algorithms are applied for rever-
beration and denoising to preprocess the data. This
improves performance as the AEs are freed from the
burden of reconstructing noise.
SNIPER (Koizumi et al., 2019) is a novel way to
incorporate anomalies that were overlooked during
operation without retraining the whole system. For
each overlooked anomaly, a new detector is cascaded
that is constrained to have a true positive rate (TPR)
= 1 for that specific anomaly. To compute the TPR,
a generative model is used to simulate samples of the
observed anomaly.
Apart from spectrogram based approaches a few
ASD approaches that directly operate on the wave-
form have been developed (Hayashi et al., 2018;
Rushe and Namee, 2019). These methods use causal
dilated convolutions (Oord et al., 2016) to predict the
next sample, i.e. they are autoregressive models that
use the prediction error to measure abnormality.
3 ASD APPROACH
In this section, we briefly introduce the common
acoustic signal processing workflow. Then we de-
scribe our ASD appraoch that relies upon pretrained
NNs for feature extraction and Gaussian Mixture
Models for density estimation in more detail.
Most machine learning models do not directly operate
on the raw waveform i.e. a sequence of air pressure
measurements. Instead, it is first transformed from
the time domain to the frequency domain exploiting
the fact that arbitrarily complex waves can be repre-
sented as a combinations of simple sinusoids. In prac-
tice, this is done using the short-time-fourier trans-
form (STFT). The STFT simply applies the discrete-
fourier-transform on small overlapping chunks of the
raw signal to account for signals whose frequency
characteristics change over time.
The output of the STFT is a matrix S ∈ R
F×T
with
F frequency bins and T time frames and is called the
spectrogram. Each cell represent the amplitude (the
normalized squared magnitude) of the corresponding
frequency bin at some point in time.
To account for the fact that the human perception of
pitch is logarithmic in nature, i.e. humans are more
discriminative at lower frequencies and less discrim-
inative at higher frequencies, one additionally trans-
forms the frequency bins into the Mel-scale using the
Mel-filterbank that is composed of overlapping trian-
gular filters. The Mel-scale is an empirically defined
perceptual scale that mirrors human perception. Fil-
ters are small for low frequencies and are of increas-
ing width for higher frequencies. They aggregate the
energy of consecutive frequency bins to describe how
much energy exists in various frequency regions. This
can be seen as a re-binning procedure that alters the
number of bins from F to M , M < F where M is
the number of Mel-filters used. Finally the log of the
energies is taken to convert from amplitude to decibel
(dB). The resulting Mel-spectrogram is a compact vi-
sual representation of audio that can be used as input
to a machine-learning pipeline. Moreover, the Mel-
spectrogram can be treated as an image of the under-
lying signal and one can therefore resort to computer
vision approaches such as convolutional neural net-
works (CNNs).
We assume that the ASD system monitors the entity
for an application specific, predefined period of time
(decision horizon) until the degree of abnormality (or
normality) needs to be estimated and that we are given
a dataset of normal operation recordings only. There-
fore, we assume that the dataset D is a set of n (equal-
length) Mel-spectrograms
D = M
1
,... ,M
n
∈ R
M ×T
(1)
where T is proportional to the decision horizon.
It is common to subdivide the computation of the fi-
nal anomaly score into a sequence of smaller predic-
tions that operate on a smaller timescale. For exam-
ple, the decision horizon might be 10 seconds but the
ASD system outputs an anomaly score every 0.5 sec-
onds. This is a simple strategy to avoid overlook-
ing subtle short-term anomalies and causes a trade-
of between local and global structure. A score for
the whole decision horizon is obtained by aggrega-
tion. In our case, we transform each Mel-spectrogram
M
i
, i = 1 . .. n into a sequence of feature representa-
tions V
i
∈ R
D×
˜
T
by using a sliding window across
the columns (time dimension). For each window of
t frames, a feature extractor
Φ : R
M ×t
→ R
D
(2)
Analysis of Feature Representations for Anomalous Sound Detection
99
extracts a D dimensional feature vector that is more
semantically compact than raw Mel-spectrogram fea-
tures. Furthermore, the feature extractor leverages
prior knowledge obtained through its pretext task.
Then the window is moved h frames to the right. Con-
sequently, the transformed dataset D
Φ
has the form
D
Φ
= V
1
,. .. ,V
n
∈ R
D×
˜
T
(3)
The number of feature vectors
˜
T is given by
T −n
h
.
Note that if
T −n
h
6∈ N an appropriate padding strategy
has to be applied.
Since no labels are available we propose to fit a Gaus-
sian mixture model (GMM) with K components to in-
dividual feature vectors in order to being able to com-
pute their density. The density can in turn be used to
describe the degree of normality of a single feature
vector.
The GMM was chosen as anomaly detector as it was
shown (M
¨
uller et al., 2020b) to outperform other
models on the task of anomalous sound detection
when using image based features. Moreover, GMMs
are fast and easy to train due to the ready availability
of reliable implementations, have a sound probabilis-
tic interpretation and have the capability to model ar-
bitrary densities.
The density of a single feature vector x ∈ R
D
is given
by:
p(x) =
K
∑
k=1
λ
i
∗ N(x|µ
i
,Σ
i
) (4)
µ
k
, Σ
k
and λ
k
are the mean, covariance matrix
and weight of the kth mixture component where
∑
K
k=1
λ
k
= 1. We compute the anomaly score for some
V
i
as follows:
p(V
i
) = p(V
i|∗,1
,. .. ,V
i|∗,
˜
T
) =
˜
T
∏
j=1
p(V
i|∗, j
) (5)
It is important to emphasize that Equations 4 and 5
are highly dependent on expressive features that en-
able learning a meaningful notion of normality. Note
that in Equation 5 we have assumed independence be-
tween consecutive feature vectors for simplicity and
used V
i|∗, j
to select the jth column vector from V
i
.
4 EXPERIMENTS
In this section we first introduce the dataset that was
used to evaluate our hypothesis. Then we describe
each deployed feature representation in more detail,
followed by the experimental setup and a brief discus-
sion of how the GMM’s hyperparameters were cho-
sen.
4.1 Dataset
To study the efficacy of different feature representa-
tions for anomalous sound detection, we use the re-
cently published MIMII dataset (Purohit et al., 2019).
It consists of recordings from four different ma-
chine types: fans, pumps, slide rails and valves un-
der normal and abnormal operation. Examples for
anomalous conditions are: leakage, clogging, voltage
change, a loose belt, rail damage or no grease. Ad-
ditionally. For each machine type there are sounds
from four different machine models (ID 0, 2,4 and
6). Lastly, there exist three different versions of
each recording where real-world background-noises
from a factory are mixed with the machine sound
according to a signal-to-noise ratio (SNR) of 6dB,
0dB and −6dB. Recordings with a SNR of −6dB
are the most challenging as they are highly contam-
inated with background noise. A practically appli-
cable and reliable anomalous sound detection system
should be able to yield good results across all combi-
nations. In total, there are 26092 normal condition
and 6065 anomalous condition segments which are
divided over 4 ∗ 4 ∗ 3 = 48 (machine types * machine
ids * SNRs) different datasets. All recordings are
sampled at 16kHz and have a duration of 10 seconds.
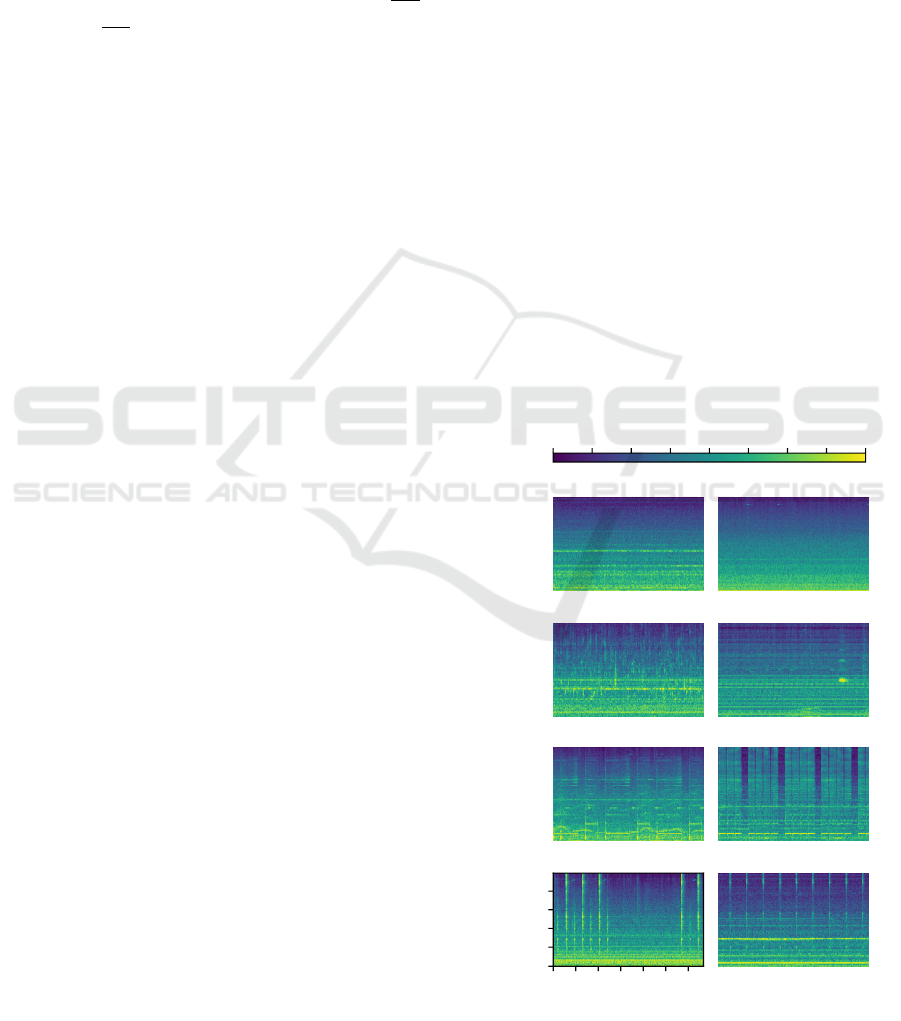
See Figure 2 for some exemplary Mel-spectrograms.
Fan normal Fan abnormal
Pump normal Pump abnormal
Slider normal Slider abnormal
0 1.5 3 4.5 6 7.5 9
Time [s]
0
512
1024
2048
4096
Hz
Valve normal Valve abnormal
-80 dB -70 dB -60 dB -50 dB -40 dB -30 dB -20 dB -10 dB +0 dB
Figure 2: Exemplary Mel-spectrograms of normal and ab-
normal operation with SNR= 6dB and machine id = 0.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
100

4.2 Feature Representations
We evaluate feature representations for ASD from
three different domains: music, images and environ-
mental sounds.
The following NNs were trained on data from an
acoustically highly similar domain to the one studied
in this work namely, environmental sounds:
VGGish. (Hershey et al., 2017)
1
VGGish is a vari-
ant of the VGG architecture that has successfully been
applied to image classification. Compared to VGG16,
the number of weight layers is reduced to 11. It con-
sists of four groups of convolution+maxpooling fol-
lowed by a single 128 dimensional fully connected
layer. It was trained to classify the soundtracks of a
dataset of ≈ 70M training videos.
L3env. (Cramer et al., 2019)
2
Unlike the other net-
works used for feature extraction in this work that
were trained on a supervised learning task, L3 was
trained in a self-supervised manner. The audio-visual
correspondence task, i.e. predicting whether a video
frame corresponds to an audio frame, removes the
need for any external labels. Training was carried
out using ≈ 195K Videos of natural acoustic environ-
ments (e.g. human and animal sounds) extracted from
AudioSet.
Musically related tasks such as music-tagging rely
upon a rich set of features such as tone, timbre and
pitch. We assume that such features are also impor-
tant for ASD. The two NNs below were trained on
musically related tasks:
MusiCNN. (Pons and Serra, 2019)
3
This CNN based
architecture uses a musically motivated front-end, a
densely connected mid-end and a temporal-pooling
back-end. The shapes of the CNN filters are explicitly
designed to account for phenomena and concepts that
typically appear in music (e.g. pitch, timbre, tempo).
Since the filter dimensions on spectrograms comprise
of time and frequency, wider filters are used to ac-
count for longer temporal dependencies and higher
filters are used to capture timbral features. The Mu-
siCNN we use in this work, was trained totag mu-
sic on the MagnaTagATune dataset. Moreover, we
choose the activations from the mean-pooling layer
as feature representation.
L3music. (Cramer et al., 2019)
4
The only difference
to L3env is, that L3music was trained on ≈ 296K
videos of people playing musical instrument extracted
from AudioSet.
1
https://github.com/beasteers/VGGish
2
https://openl3.readthedocs.io/
3
https://github.com/jordipons/musicnn
4
https://openl3.readthedocs.io/
Lastly, the following NNs were trained on the
task of image classification on ImageNet. The Mel-
spectrograms are converted to 224×224 images using
the Viridis colormap
5
as suggested by (Amiriparian
et al., 2017) in the context of snore-sound classifica-
tion. Then the RGB values are standardized using the
values obtained from ImageNet. We chose images be-
cause we observed that anomalous sound patterns can
often be spotted visually in their spectral representa-
tion (M
¨
uller et al., 2020b).
ResNet34. (He et al., 2016) ResNet uses skip-
connections to give the network the ability to bypass
blocks of convolutions. This is done to ease the van-
ishing gradient problem that would occur due to an
increased network depth. Depth allows the network to
extract a richer, more informative features. We use the
activations from the penultimate layer (right before
the 1K-way classification head) as representation.
DenseNet121. (Huang et al., 2017) Just as ResNet,
DenseNet was designed to enable greater network
depth while being more parameter efficient. Here,
the next convolutional layer receives the feature maps
from all previous layers and computes a small num-
ber of feature maps to add to the stack according to
a growth rate. This process is interleaved with 1 × 1
convolutions and average pooling to reduce the num-
ber of channels and the size of the feature maps, re-
spectively. We average-pool the activations from the
penultimate layer to receive a flat feature representa-
tion.
To compare the representations above with the
more common AE-based approach we implemented
the following AE:
Autoencoder (AE). (Purohit et al., 2019) This au-
toencoder was proposed by the authors of the MIMII
dataset and serves as a strong baseline to contrast
transfer learning approaches with the more commonly
applied method of reconstruction error based anomaly
detection. Every 5 columns (time dimension) of the
Mel-spectrogram are concatenated to form a feature
vector ∈ R
320
which serves as input to a dense AE ar-
chitecture (same as (Purohit et al., 2019)). The mean
squared reconstruction error is used as loss function
and as anomaly score. The AEs are trained with a
batch size of 128 for 50 epochs, a learning rate of
0.002 and a L2 regularization of 10
−5
.
A brief overview of the different feature extractors
and their corresponding training domain and repre-
sentation representation size (dimensionality) is given
in Table 1.
5
Note that we also evaluated different color-maps but
have found the differences in the results to be neglectable.
Analysis of Feature Representations for Anomalous Sound Detection
101

4.3 Experimental Setup
To study the efficacy of the different feature extrac-
tors, we propose the following workflow:
1. Compute the feature representations for each 10s
long sound sample in the train set with a window
size of 1s and an overlap of 0.5s. This results in
20 feature vectors per sample.
2. Apply normalization to the resulting represen-
tations and use Principal Components Analysis
(PCA) to reduce their dimensionality such that
98% of the representations variance is retained.
3. Fit a Gaussian Mixture Model (GMM) to the
transformed data.
4. At test time, obtain the transformed feature repre-
sentations for each 10s long sound sample (Steps
1 & 2) in the test set. The anomaly score for a sin-
gle transformed feature representation is given by
the weighted negative log probabilities. By mean-
pooling the scores over each sound sample, one
obtains the final anomaly scores.
A high-level overview of this process is depicted in
Figure 1.
Model performance is measured with the Area
Under the Receiver Operating Characteristics (AUC)
which quantifies how well a model can distinguish
between normal and anomalous operation across all
possible thresholds.
For each combination of machine type, machine
id, SNR and feature representation a separate GMM
is trained.
To form the test set, the same amount of normal oper-
ation data is randomly removed from the train set as
there is anomalous data, i.e. training is done on the
remaining normal operation data, anomalous data is
never seen during training and the test set is balanced.
Each experiment is repeated five times across five dif-
ferent seeds.
First, the results are conditioned on the represen-
tation, the SNR and the machine type to obtain a cor-
responding performance distributions. We use Box-
plots to report these distributions grouped by the do-
main of the representations. The results for image,
music and environmental sound based representations
are depicted in Figure 4, Figure 5 and Figure 6, re-
spectively. Then we select the best performing (fea-
ture extractor - machine type) pairs and compare the
results by domain as well as with the autoencoder
baseline in Figure 7.
In Table 2 we additionally condition the results
from Figure 7 on the machine id to gain more insights
on how the models perform on each individual ma-
Table 1: Overview of the different feature extractors.
Name Trained on Rep. size
L3env Environmental
sounds
512
VGGish 128
ResNet34
Images
512
DenseNet121 1024
MusiCNN
Music
753
L3music 512
chine id. Each cell represents the average AUC ± one
standard deviation.
A detailed discussion of the results follows in Sec-
tion 5.
4.4 Choice of Hyperparameters
The crucial hyperparameters of GMMs are the num-
ber of mixtures and the covariance matrix type. To
determine suitable hyperparameters, we randomly se-
lected three feature extractors and two machine types
with SNR= 0dB and ID= 0. Then we computed the
average AUC with a varying number of mixture com-
ponents {1,4, 8,. .. 28} with full and diagonal covari-
ance matrices (Figure 3).
While the features extracted from MusiCNN ap-
pear to be stable with respect to the number of mix-
tures and the covariance type, results for other rep-
resentations quickly decline when using full covari-
ance matrices and an increasing number of mixtures.
Hence, the GMM becomes too expressive. This ef-
fect is not observed when using diagonal covariance
matrices as the results are stable and slightly increase
with the number of mixtures.
Since anomalous data is usually scarce, it is not
feasible to tune the hyperparameters on every setting
and consequently a stable set of hyperparameters is
desirable. Therefore, we use a GMM with 20 mixture
components and diagonal covariance matrices for all
experiments in this work.
5 RESULTS
In this section we first discuss the results for each in-
dividual feature extractor domain. Then we present
findings that apply to all domains. Finally, we discuss
the limitations of our analysis.
5.1 Image based Representations
DenseNet121 outperforms ResNet34 in terms of the
mean and median AUC on all machine types except
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
102
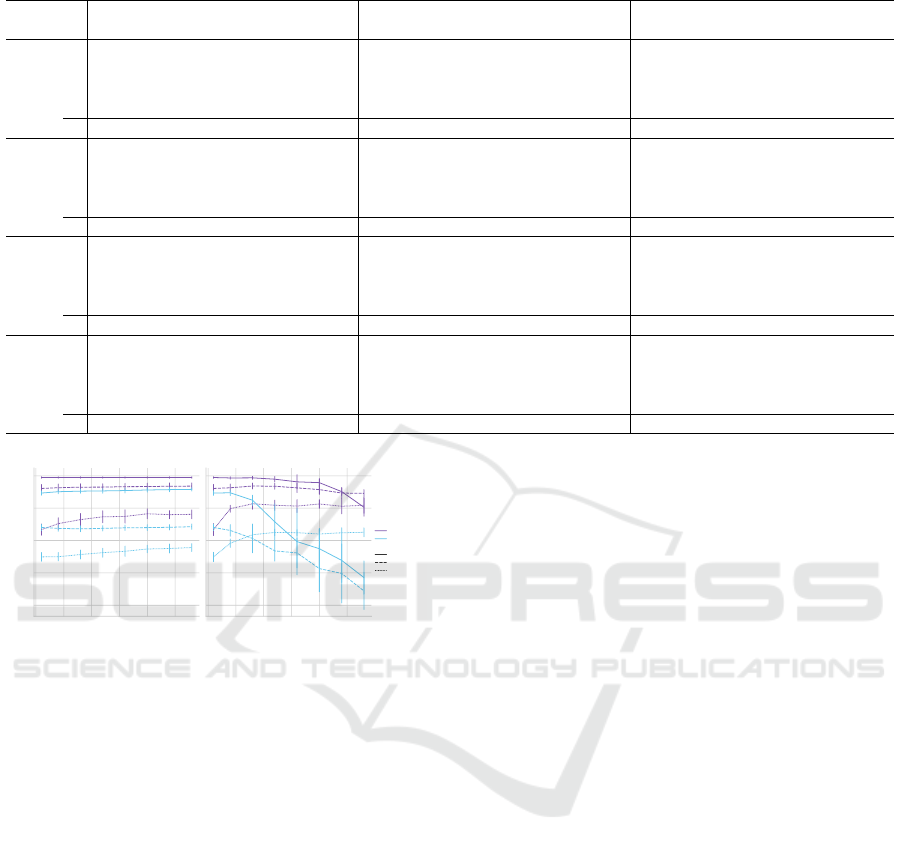
Table 2: Mean AUCs for all experiments.
SNR -6dB 0dB 6dB
Machine ID AE Env. Imgs. Music AE Env. Imgs. Music AE Env. Imgs. Music
Fan
0 53.0±1.6 58.7±1.2 57.3±1.3 61.4±1.0 58.0±3.5 67.0±0.8 62.7±0.8 71.6±0.4 74.5±1.7 83.7±1.3 74.1±0.8 88.5±0.6
2 68.7±1.6 70.9±1.1 58.5±1.7 66.6±1.7 85.9±1.5 85.1±0.6 69.7±0.9 82.9±0.9 93.0±1.3 92.8±0.5 81.4±0.5 96.4±0.5
4 56.8±1.2 56.3±1.8 52.0±1.1 52.8±1.5 76.5±2.1 76.5±0.7 65.9±1.4 79.6±1.4 91.5±1.2 93.5±0.6 85.9±1.1 98.9±0.7
6 78.9±2.1 87.4±0.6 87.8±1.0 94.8±1.0 93.9±0.8 94.7±0.2 97.7±0.1 99.9±0.1 98.7±0.3 98.4±0.2 99.4±0.1 100.0±0
∅ 64.4±10.4 68.3±12.7 63.9±14.4 68.9±16.2 78.6±13.7 80.8±10.5 74.0±14.3 83.5±10.6 89.4±9.2 92.1±5.5 85.2±9.5 95.9±4.6
Pump
0 71.4±2.8 78.6±1.5 75.8±2.1 84.0±1.5 72.5±1.7 87.9±1.2 85.1±1.1 85.4±0.4 87.1±1.0 96.0±0.5 94.5±0.6 94.1±0.4
2 53.2±3.0 55.4±1.1 68.1±2.1 62.3±1.3 55.1±2.4 65.9±2.5 90.4±1.3 77.8±2.0 60.1±1.5 74.3±1.2 97.6±0.4 81.6±0.9
4 93.0±2.3 96.1±1.3 86.5±1.1 76.2±2.4 99.6±0.6 99.5±0.3 96.7±1.1 88.3±1.6 100.0±0 100.0±0. 99.8±0.1 98.9±1.0
6 71.8±3.0 61.6±3.2 58.7±3.8 67.2±2.6 88.1±2.6 83.1±1.8 79.9±2.4 86.0±0.7 97.8±1.0 97.9±0.3 96.4±1.6 98.7±0.1
∅ 72.4±14.5 72.9±16.4 72.3±10.7 72.4±8.8 78.8±17.0 84.1±12.5 88.0±6.5 84.4±4.2 86.2±16.1 92.0±10.6 97.1±2.2 93.3±7.2
Slider
0 91.5±1.9 98.5±0.3 99.5±0.3 99.1±0.3 96.4±0.8 99.8±0.1 99.9±0.1 99.9±0.1 99.2±0.3 100.0±0 100.0±0 100.0±0
2 77.9±1.6 83.0±0.9 91.7±1.0 83.2±1.0 86.5±0.6 93.1±0.8 97.0±0.5 92.7±0.6 94.4±0.8 99.0±0.3 99.5±0.2 98.9±0.2
4 71.0±2.7 82.0±1.4 70.6±2.3 79.2±1.7 88.9±3.0 95.6±0.7 84.0±1.0 94.4±0.8 95.6±1.8 98.8±0.3 92.4±0.5 98.6±0.4
6 55.3±2.8 66.8±2.4 56.8±3.8 69.8±1.8 61.8±3.1 87.3±2.8 63.3±3.1 86.7±2.2 71.7±4.6 95.9±1.3 74.9±4.4 96.4±0.9
∅ 73.9±13.4 82.6±11.6 79.7±17.5 82.8±10.9 83.4±13.3 93.9±4.8 86.1±14.9 93.5±5.0 90.2±11.3 98.4±1.7 91.7±10.6 98.5±1.4
Valve
0 50.3±4.7 61.0±1.7 73.4±1.7 70.3±2.2 51.4±2.4 75.4±3.6 88.6±1.7 78.1±2.9 60.5±8.7 74.2±0.7 90.5±1.7 75.2±1.2
2 62.0±3.5 74.9±1.9 63.9±3.0 70.3±2.4 72.2±2.9 82.0±2.1 70.8±1.7 80.2±1.6 75.0±6.0 85.0±1.0 72.6±1.5 86.3±0.8
4 61.5±3.0 64.8±3.3 64.2±2.0 68.2±1.7 65.6±4.2 74.6±1.9 70.8±2.7 79.6±2.6 66.9±3.4 82.4±1.8 85.4±2.5 84.2±0.8
6 51.2±2.9 55.8±2.6 59.4±3.3 58.7±2.9 57.5±2.0 57.8±3.6 55.9±1.7 60.7±2.6 66.3±5.0 72.0±0.8 66.0±2.1 74.2±1.1
∅ 56.2±6.6 64.2±7.5 65.2±5.8 66.9±5.4 61.7±8.5 72.5±9.6 71.5±12.0 74.7±8.6 67.2±7.8 78.4±5.7 78.6±10.2 80.0±5.5
0 5 10 15 20 25
Mixture Components
60
70
80
90
100
AUC
Covariance = diag
0 5 10 15 20 25
Mixture Components
Covariance = full
Machine
Pump
Slider
Setting
L3env
DenseNet121
MusiCNN
Figure 3: Small scale study to determine the GMM hyper-
parameters.
for slider where the difference is insignificant. More-
over, there are no major differences with respect to the
variance. The most striking performance differences
are observed on pump and valve.
A possible explanation for the superiority of
DenseNet121 is that it also outperforms ResNet34 in
terms of classification accuracy on ImageNet by ex-
tracting a richer, more nuanced and more discrimina-
tive set of features and that this superiority also carries
over to our setting.
Recent work (M
¨
uller et al., 2020b) did not evalu-
ate their method on DenseNet based representations
and concluded that ResNet based features are best
suited for anomalous sound detection. In contrast,
here we have found that in our setting, ResNet is out-
performed by DenseNet. Our results indicate that fur-
ther studies are necessary to explore the space of im-
age based feature extractors for ASD.
5.2 Music based Representations
From Figure 5 we can observe that L3music shows
significantly better results on slider and valve than
MusiCNN. On the other hand, MusiCNN outperforms
L3music on fan and pump.
While fan and pump have a stationary sound pat-
tern, slider and valve exhibit non-stationary patterns.
Our interpretation is that MusiCNN’s rectangular hor-
izontal filters (time dimension) are especially well
suited to extract features that describe the normal op-
eration of stationary sounds since they are almost con-
stant and vary only slightly over time. Then, anoma-
lies will be characterized by the absence of certain
features for example because the machine randomly
stops operating, suddenly exhibits irregular sounds
or the pitch of the sound changes due to damages.
For slider and valve, MusiCNN’s music tagging task
might be too restrictive compared to the very general
audio-visual correspondence task of L3music.
5.3 Environmental Sound based
Representations
From the inspection of Figure 6 we can conclude that
L3env yields far better results on slider and valve
compared to VGGish. On fan and pump, both feature
extractors perform on-par.
Just as in Section 5.2, the most obvious perfor-
mance differences can be observed on non-stationary
machine sounds. We noticed that on slider and valve,
the VGGish feature representations are highly redun-
dant. That is, PCA reduces representations down to
Analysis of Feature Representations for Anomalous Sound Detection
103
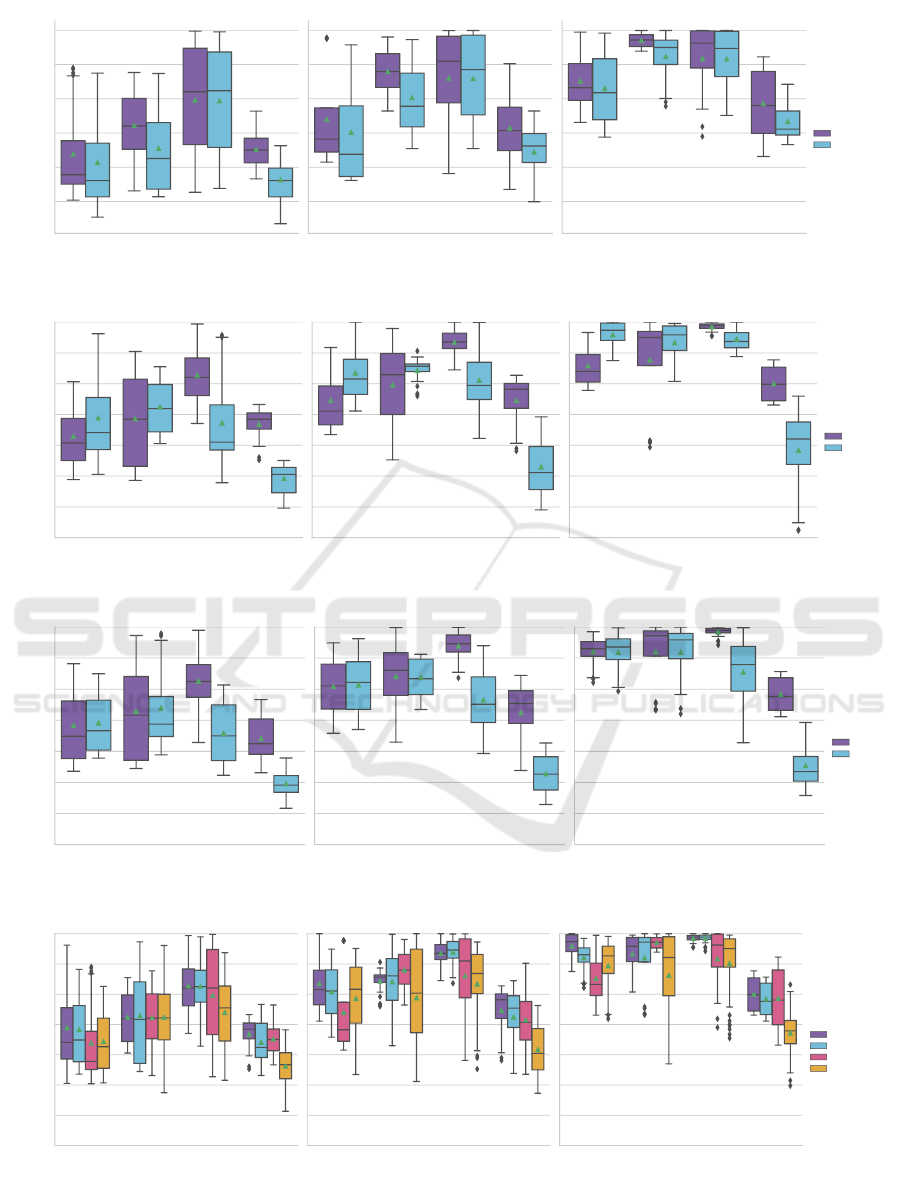
Fan Pump Slider Valve
Machine
50
60
70
80
90
100
AUC
SNR = -6dB
Fan Pump Slider Valve
Machine
SNR = 0dB
Fan Pump Slider Valve
Machine
SNR = 6dB
Representation
DenseNet121
ResNet34
Figure 4: Comparison between image based representations.
Fan Pump Slider Valve
Machine
30
40
50
60
70
80
90
100
AUC
SNR = -6dB
Fan Pump Slider Valve
Machine
SNR = 0dB
Fan Pump Slider Valve
Machine
SNR = 6dB
Representation
L3music
MusiCNN
Figure 5: Comparison between music based representations.
Fan Pump Slider Valve
Machine
30
40
50
60
70
80
90
100
AUC
SNR = -6dB
Fan Pump Slider Valve
Machine
SNR = 0dB
Fan Pump Slider Valve
Machine
SNR = 6dB
Representation
L3env
VGGish
Figure 6: Comparison between environmental sound based representations.
Fan Pump Slider Valve
Machine
30
40
50
60
70
80
90
100
AUC
SNR = -6dB
Fan Pump Slider Valve
Machine
SNR = 0dB
Fan Pump Slider Valve
Machine
SNR = 6dB
Category
Music
Environmental
Images
AE
Figure 7: Comparison between the best performing representations and the autoencoder baseline. Music representations:
MusiCNN for Fan and Pump, L3music for Slider and Valve. Environmental Sounds: L3env. Images: DenseNet121.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
104

a very small number of features. Essentially, VG-
Gish extracts very similar features for all recordings
thereby hindering the creation of an informative nor-
mal operation model.
Previous work (Cramer et al., 2019) used L3 rep-
resentations for sound event detection and reports su-
perior performance compared to VGGish. In our case
these results also hold for ASD. Moreover, we con-
juncture that the self-supervised audio-visual corre-
spondence task extracts a richer set of features as it
is a more complex task that needs more expressive,
general purpose features compared to VGGish’s more
narrow classification objective.
5.4 General Observations
Generally, the introduction of background noise con-
siderably reduces the performance of all representa-
tions. Moreover, all representations are affected by
background noise in the same way i.e. noise does not
change the performance ranking.
Fan is the machine type that suffers the most from
increased background noise. This is because fan
sounds and background noise exhibit a similar sound
pattern, making them harder to distinguish.
We found the valve machine type samples (highly
non-stationary) to be the hardest to detect anomalous
operations on, and slider to be the easiest (clearly vis-
ible anomalies in the Mel-spectrograms).
When averaged over the machine id (Table 2), all
transfer learning approaches outperform the AE base-
line. Thus, this confirms our hypothesis that transfer-
ring knowledge from pretrained NNs increases ASD
performance.
Music based representations achieve the best re-
sults with 8/12 top performances. Both image and en-
vironmental sound based representations account for
2/12 top performances, each.
These results challenge the intuition that closely
matching the domain results in better downstream
task performance as one might have suspected envi-
ronmental sound based representations to yield the
best results because they have the smallest domain
mismatch with machine sounds. However, it might be
more important to use audio content that maximizes
the discriminative power of the representations, inde-
pendently of the downstream domain (Cramer et al.,
2019). In the case of L3 based representations, peo-
ple playing musical instruments have a greater degree
of audio visual correspondence than environmental
videos. Moreover, music itself provides a richer, more
diverse training signal than environmental sounds.
5.5 Limitations of the Analysis
Evaluating the different representations presents a
challenge as it is hard to find the particular reasons
why one representation works better than another
since the feature extractors were trained on different
dataset with a varying amount of data. Additionally,
they all use different (black-box) neural network ar-
chitectures and slightly different Mel-spectrogram pa-
rameters. Moreover, their domain varies, the train-
ing task was either supervised or self-supervised and
no information on the specific type of anomaly of a
recording is provided by the MIMII dataset.
6 CONCLUSION
In this work, we evaluated the effectiveness of trans-
ferring knowledge from pretrained NNs for anoma-
lous sound detection using the feature extraction
paradigm. Our approach was evaluated with feature
representations from the image, environmental sound
and music domain and allows for fast experimentation
as only shallow models have to be trained. We showed
that almost all representations yield competitive ASD
performance with an advantage for music based rep-
resentations. Thus, we have found that even under
a domain mismatch between the feature extractor and
the downstream ASD task, the studied representations
are suitable for ASD. This suggests that pretraining on
a closely related domain might not always be neces-
sary which results in a greater flexibility in the choice
of pretraining strategies and datasets. The key finding
of this work is that a relatively simple experimental
setup based on transfer learning can yield compet-
itive ASD performance without the need to develop
a completely new model. Hence, we argue that fu-
ture approaches should compare themselves against
transfer learning approaches. Furthermore, this work
provides guidance on the choice of feature extractors
for future ASD research. In future work, one might
experiment with the best feature extractors from this
work in conjunction with a sequence-to-sequence au-
toencoder. This approach would explicitly account
for the temporal structure of sound and might could
performance on machine types with a non-stationary
sound profile.
REFERENCES
Amiriparian, S., Gerczuk, M., Ottl, S., Cummins, N., Fre-
itag, M., Pugachevskiy, S., Baird, A., and Schuller,
Analysis of Feature Representations for Anomalous Sound Detection
105

B. W. (2017). Snore sound classification using image-
based deep spectrum features. In INTERSPEECH,
volume 434, pages 3512–3516.
Bayram, B., Duman, T. B., and Ince, G. (2020). Real time
detection of acoustic anomalies in industrial processes
using sequential autoencoders. Expert Systems, page
e12564.
Beckmann, P., Kegler, M., Saltini, H., and Cernak, M.
(2019). Speech-vgg: A deep feature extractor for
speech processing. arXiv preprint arXiv:1910.09909.
Chi, P.-H., Chung, P.-H., Wu, T.-H., Hsieh, C.-C., Li, S.-
W., and Lee, H.-y. (2020). Audio albert: A lite bert
for self-supervised learning of audio representation.
arXiv preprint arXiv:2005.08575.
Cramer, J., Wu, H.-H., Salamon, J., and Bello, J. P. (2019).
Look, listen, and learn more: Design choices for
deep audio embeddings. In IEEE International Con-
ference on Acoustics, Speech and Signal Processing
(ICASSP), pages 3852–3856. IEEE.
Devlin, J., Chang, M.-W., Lee, K., and Toutanova, K.
(2019). Bert: Pre-training of deep bidirectional trans-
formers for language understanding. In Proceedings
of the 2019 Conference of the North American Chap-
ter of the Association for Computational Linguistics,
pages 4171–4186.
Donahue, J., Jia, Y., Vinyals, O., Hoffman, J., Zhang, N.,
Tzeng, E., and Darrell, T. (2014). Decaf: A deep con-
volutional activation feature for generic visual recog-
nition. In International conference on machine learn-
ing, pages 647–655.
Duman, T. B., Bayram, B., and
˙
Ince, G. (2019). Acoustic
anomaly detection using convolutional autoencoders
in industrial processes. In International Workshop on
Soft Computing Models in Industrial and Environmen-
tal Applications, pages 432–442. Springer.
Hasan, M. A., Abu-Bakar, M.-H., Razuwan, R., and Nazri,
Z. (2018). Deep neural network tool chatter model
for aluminum surface milling using acoustic emmi-
sion sensor. In MATEC Web of Conferences.
Hayashi, T., Komatsu, T., Kondo, R., Toda, T., and Takeda,
K. (2018). Anomalous sound event detection based on
wavenet. In 2018 26th European Signal Processing
Conference (EUSIPCO), pages 2494–2498. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hershey, S., Chaudhuri, S., Ellis, D. P., Gemmeke, J. F.,
Jansen, A., Moore, R. C., Plakal, M., Platt, D.,
Saurous, R. A., Seybold, B., et al. (2017). Cnn archi-
tectures for large-scale audio classification. In IEEE
International Conference on Acoustics, Speech and
Signal Processing (ICASSP), pages 131–135. IEEE.
Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely connected convolutional net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4700–
4708.
Kawaguchi, Y., Tanabe, R., Endo, T., Ichige, K., and
Hamada, K. (2019). Anomaly detection based on an
ensemble of dereverberation and anomalous sound ex-
traction. In IEEE International Conference on Acous-
tics, Speech and Signal Processing (ICASSP), pages
865–869.
Koizumi, Y., Murata, S., Harada, N., Saito, S., and Ue-
matsu, H. (2019). Sniper: Few-shot learning for
anomaly detection to minimize false-negative rate
with ensured true-positive rate. In IEEE International
Conference on Acoustics, Speech and Signal Process-
ing (ICASSP), pages 915–919. IEEE.
Koizumi, Y., Saito, S., Uematsu, H., and Harada, N. (2017).
Optimizing acoustic feature extractor for anomalous
sound detection based on neyman-pearson lemma. In
2017 25th European Signal Processing Conference
(EUSIPCO), pages 698–702. IEEE.
Marchi, E., Vesperini, F., Eyben, F., Squartini, S., and
Schuller, B. (2015). A novel approach for automatic
acoustic novelty detection using a denoising autoen-
coder with bidirectional lstm neural networks. In
IEEE international conference on acoustics, speech
and signal processing (ICASSP), pages 1996–2000.
IEEE.
M
¨
uller, R., Illium, S., , Ritz, F., Schr
¨
oder, T., Platschek, C.,
Ochs, J., and Linnhoff-Popien, C. (2020a). Acoustic
leak detection in water networks. Technical report.
M
¨
uller, R., Ritz, F., Illium, S., and Linnhoff-Popien, C.
(2020b). Acoustic anomaly detection for machine
sounds based on image transfer learning. arXiv
preprint arXiv:2006.03429.
Oord, A. v. d., Dieleman, S., Zen, H., Simonyan, K.,
Vinyals, O., Graves, A., Kalchbrenner, N., Senior,
A., and Kavukcuoglu, K. (2016). Wavenet: A
generative model for raw audio. arXiv preprint
arXiv:1609.03499.
Peters, M. E., Neumann, M., Iyyer, M., Gardner, M., Clark,
C., Lee, K., and Zettlemoyer, L. (2018). Deep con-
textualized word representations. In Proceedings of
NAACL-HLT, pages 2227–2237.
Pons, J. and Serra, X. (2019). musicnn: Pre-trained con-
volutional neural networks for music audio tagging.
arXiv preprint arXiv:1909.06654.
Purohit, H., Tanabe, R., Ichige, K., Endo, T., Nikaido,
Y., Suefusa, K., and Kawaguchi, Y. (2019). Mimii
dataset: Sound dataset for malfunctioning industrial
machine investigation and inspection. arXiv preprint
arXiv:1909.09347.
Ruder, S. (2018). NLP’s ImageNet moment has arrived.
Rushe, E. and Namee, B. M. (2019). Anomaly detection
in raw audio using deep autoregressive networks. In
IEEE International Conference on Acoustics, Speech
and Signal Processing (ICASSP), pages 3597–3601.
Suefusa, K., Nishida, T., Purohit, H., Tanabe, R., Endo, T.,
and Kawaguchi, Y. (2020). Anomalous sound detec-
tion based on interpolation deep neural network. In
IEEE International Conference on Acoustics, Speech
and Signal Processing (ICASSP), pages 271–275.
ICAART 2021 - 13th International Conference on Agents and Artificial Intelligence
106
