
Revisiting the Deformable Convolution by Visualization
Yuqi Zhang, Yuyang Xie, Linfeng Luo and Fengming Cao
Pingan International Smart City Technologies Ltd., Shenzhen, China
Keywords:
Deformable Convolution, Object Detection, Visualization.
Abstract:
The deformable convolution improves the performance by a large margin across various tasks in computer
vision. The detailed analysis of the deformable convolution attracts less attention than the application of it. To
strengthen the understanding of the deformable convolution, the offset fields of the deformable convolution
in object detectors are visualized with proposed visualizing methods. After projecting the offset fields to the
feature map coordinates, we find that the displacement condenses the features of each object to the object
center and it learns to segment objects even without segmentation annotations. Meanwhile, projecting the
offset fields to the kernel coordinates demonstrates that the displacement inside each kernel is able to predict
the size of the object on it. The two findings indicate the offset field learns to predict the location and the size
of the object, which are crucial in understanding the image. The visualization in this work explicitly shows
the power of the deformable convolution by decoding the information in the offset fields. The ablation studies
of the two projections of the offset fields reveal that the projection in the kernel viewpoint contributes mostly
in current object detectors.
1 INTRODUCTION
The wide applications of deformable convolution op-
eration (Dai et al., 2017; Zhu et al., 2019; Yang et al.,
2019a; Chen et al., 2020; Thomas et al., 2019; Yang
et al., 2019b; Kong et al., 2020; Vu et al., 2019)
show its importance in computer vision. The de-
formable convolution operation is proposed to im-
prove the anchor-based object detector and semantic
segmentation initially (Dai et al., 2017; Zhu et al.,
2019), then is applied in several anchor-free object
detectors (Wang et al., 2019; Yang et al., 2019a;
Chen et al., 2020; Yang et al., 2019b; Kong et al.,
2020), and recently it helps in modelling the 3D point
clouds (Thomas et al., 2019). The deformable con-
volution operation is believed to have two function-
alities (Wang et al., 2019): (1) it improves the rep-
resentation of features, (2) it encodes the object ge-
ometry inside its parameters. The deformable convo-
lution has demonstrated its superior performance in
the computer vision tasks. However, the understand-
ing of the deformable convolution is not thoroughly
enough, and one challenge remains in the visualiza-
tion of it. The visualization, as the most straightfor-
ward approach, can demystify how the black boxes
learns and why the operation works.
For the deformable convolution (Dai et al., 2017),
the output feature map y for the location p
0
,
y(p
0
) =
∑
p
n
∈R
w(p
n
) ·x(p
0
+ p
n
+ ∆p
n
) (1)
where w is the weight of the kernel and x is the value
from feature map. As a 3 ×3 kernel with dilation of
1, R ∈ {(−1,−1),(−1,0),..., (0,1),(1,1)}, and ∆p
n
is the offset with respect to each p
n
. The main dif-
ference between the deformable convolution and the
normal convolution is that the deformable convolu-
tion contains the dynamic offset field ∆p
n
. The dy-
namic ∆p
n
enables the network to recognize objects
with various geometric variations in images. The dy-
namic offset field is predicted from the feature maps
with a lightweight neural networks. Therefore, the
explanation of the deformable convolution relies on
the offset field ∆p
n
. Unfortunately, previous attempts
to visualize the deformable convolution failed to con-
centrate on the offset field due to the high dimen-
sions of the offset field. Although many works pro-
vide visualization methods for convolution neural net-
works such as gradient visualization (Simonyan and
Zisserman, 2014), perturbation (Ribeiro et al., 2016),
class activation map (Zhou et al., 2016; Wang et al.,
2020), and the deconvolutions related methods (Zeiler
and Fergus, 2014), the deformable convolutions differ
from basic convolutions because of the use of the off-
set field.
In this work, to understand the deformable convo-
lution further, we visualize the offset field using the
190
Zhang, Y., Xie, Y., Luo, L. and Cao, F.
Revisiting the Deformable Convolution by Visualization.
DOI: 10.5220/0010200801900195
In Proceedings of the 10th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2021), pages 190-195
ISBN: 978-989-758-486-2
Copyright
c
2021 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

vector analysis. In the visualization, the offset field is
projected to the feature map coordinate and the kernel
coordinate respectively. The two projections effec-
tively separate the learned information into a global
context in image scale and a local context in kernel
scale. The visualization results straightforwardly re-
veal why the deformable convolution surpasses the
normal convolution in object detectors: (1) the de-
formable convolution learns to condense the features
of the object to the object center, (2) the deformable
convolution learns to segment objects even without
segmentation annotations, (3) the deformable convo-
lution learns the size of the object for each feature
point. The ablation studies of the two projections of
the offset fields are also carried out and show that the
projection in the kernel viewpoint has more contribu-
tions.
2 RELATED WORK
In the beginning, the deformable convolutions were
used in the backbone of the object detectors in (Dai
et al., 2017; Gao et al., 2019) by substituting the nor-
mal convolution operation with the deformable con-
volution. Amazed by its prevailing results on the
COCO detection benchmark (Lin et al., 2014), many
other researchers tried to apply the deformable con-
volution in the region proposal networks (Wang et al.,
2019; Vu et al., 2019) and the bounding box heads
(Yang et al., 2019a; Chen et al., 2020; Kong et al.,
2020; Yang et al., 2019b). With so many applications
of the deformable convolution, the straightforward vi-
sualization of it demands more attention.
The receptive fields and the sampling locations are
used to visualize the effect of the offset field in (Dai
et al., 2017), the visualization connects the sampling
locations to the activation units and shows the power
of the dynamic sampling locations. After that, the ef-
fective receptive fields and effective sampling loca-
tions are used to further analyze the deformable con-
volution in (Zhu et al., 2019; Gao et al., 2019), still,
the visualization results fail to focus on the core of the
deformable convolution, which is the offset field. In
(Wang et al., 2019; Yang et al., 2019a; Chen et al.,
2020; Yang et al., 2019b; Kong et al., 2020), the
offset field of the deformable convolutions are cor-
related directly with the size and the position of the
object, which cast a light on the potential use of the
deformable convolution. To promote the future ap-
plication of the deformable convolution, we believe
the detailed visualization of it will increase the trans-
parency to humans and provide promising insights of
its potential use.
3 VISUALIZE THE OFFSET
FIELD
For a deformable convolution operation, the ∆p
n
(p
0
)
has 9 separate offset maps, corresponding to the offset
field for 9 kernel points. In this work we focus on a
single deformable convolution operation and visual-
ize the offset field inside of it. When a kernel point
p
n
slides through the feature map, the offset maps
in Figure 1(a)-(i) records its learned offset field. In
the beginning of the training process, the offset fields
are initialized with zero vectors, and after the learning
of the detector, most of the offset fields evolve into a
quite ordering state as the red arrows in each sub fig-
ures have similar vector value.
Apart from visualizing the offset field as a whole,
the offset field can be projected into two perspectives.
One is from the feature map coordinate and the other
one is from the kernel coordinate. In the feature map
coordinate, the average displacement d
f
(p
0
, p
n
) over
p
n
is,
d
f
(p
0
) =
1
9
∑
p
n
∈R
∆p
n
(p
0
) (2)
where R ∈ {(−1,−1),(−1, 0),...,(0,1), (1,1)}. Then
in the kernel coordinate, the displacement field inside
each kernel, the d
k
, is,
d
k
(p
0
, p
n
) = ∆p
n
(p
0
) −d
f
(p
0
) (3)
The distribution of d
f
(p
0
) over the entire feature
map can be seen in Figure 2. Since observing that
the arrows of d
f
(p
0
) point to the objects’ centers, we
borrow the concept of the divergence from the vec-
tor analysis here to visualize the d
f
(p
0
) better. The
divergence div(p
0
) of the d
f
(p
0
) is,
div(p
0
) =
∂
∂x
d
f
x
(p
0
) +
∂
∂y
d
f
y
(p
0
) (4)
where d
f
x
(p
0
) and d
f
y
(p
0
) are the displacement com-
ponents in the x and y axis respectively, and ∂/∂x and
∂/∂y are the partial derivative operators in the x and y
axis respectively. The divergence is a vector operator
that operates on a vector field, producing a scalar field
representing the volume density of the outward flux of
a vector field from an infinitesimal volume around a
given point. The positive value means the vector field
outward flux and the negative value means the inward
flux.
Figure 2 plots the distributions of the d
f
for the
feature maps, which are learned in the Faster RCNN
object detector with deformable convolutions in the
backbone as stated in (Gao et al., 2019) and trained
with COCO bounding boxes annotations only. Two
fundamental insights can be found in them. The first
Revisiting the Deformable Convolution by Visualization
191

Figure 1: The offset fields for 3×3 kernel points for a deformable convolution with respect to an example image in the
validation dataset from COCO. The small arrows in (a)-(i) represent the offset field for each kernel point and the thick arrows
in central show the trends of offset for each kernel point.
insight is that the arrows d
f
from Equation 2 are con-
verging to the centers of each objects, which are rep-
resented by the negative value of divergence from
Equation 4 and the negative divergence from the fea-
ture points are shown with red masks in Figure 2.
Converging feature points to the object center is a key
function of the deformable convolution. The converg-
ing of the feature points can be understood as an in-
formation condensation process when the feature map
stride is smaller than the object size. The information
from the feature map with only a part of a zebra in it
is less than the information from the feature map with
the whole zebra. Therefore, after the deformable con-
volution, the feature maps are learned with the con-
densed information which helps the network to under-
stand the image. The second insight is that though the
network is trained without any mask information, the
visualization of the offset field shows that it is able to
learn the segmentation inside the deformable convolu-
tion operation. In different scale of the feature maps,
the deformable convolution focuses on different scale
of information. For example, the deformable convo-
lution in the feature map generated with smaller stride
locates the strips of the zebra and the branches of the
tree in Figure 2(c) while it locates the zebra and the
tree as a whole with larger stride, as shown in Figure
2(d).
To find out what information is inside the kernel
viewpoint, Figure 3 is shown for the learned distri-
bution of the d
k
. The radius of the circle is calcu-
lated as r ∝
√
width ×height where width is the off-
set difference in x axis between left and right kernel
points, and height is the offset difference in y axis be-
tween top and bottom kernel points. Therefore, the
areas of each circles in Figure 3 indicate the expan-
sion or shrinkage status of the d
k
. In other words,
the circles reflect how large each 3×3 kernel wants
to cover. Figure 3 shows that the d
k
has learned the
size of the object for each 3×3 kernel since the ra-
dius of the circle accords with the size of the object
behind the feature point. In detail, in Figure 3(a) with
a dog, a person, a Frisbee, and a tree, the largest cir-
cle is inside the tree while the smallest circle is in-
side the Frisbee, which corresponds to the sizes of the
objects, Size
tree
> Size
Frisbee
. It should be noted that
not all feature points inside the object have the same
size, especially when the object is across many fea-
ture points. Not every feature point inside the object
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
192
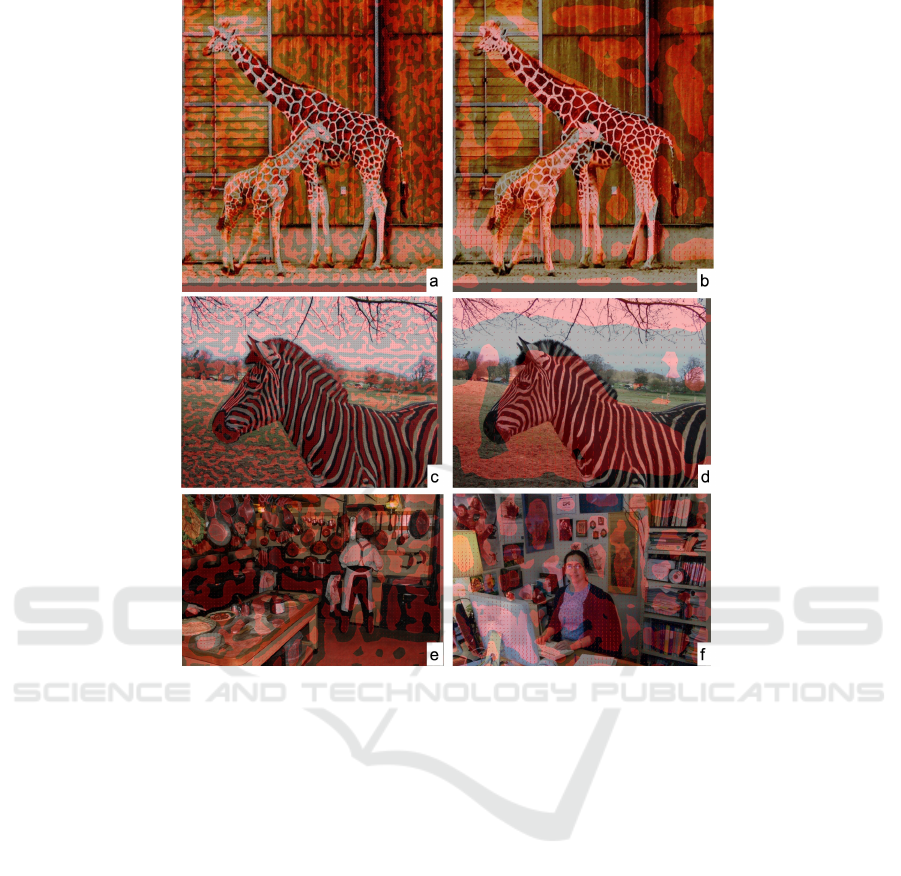
Figure 2: The visualization of the offset field in deformable convolution for the feature map point of view. (a) and (c) are
from stage 3, (b), (e), and (f) are from stage 4, and (d) is from stage 5. All are examples of displacement d
f
converging to the
centers of the object.
reflects the real size of the object except the feature
point with the largest circle.
The separate visualizations of the offset field into
the feature map coordinate and the kernel coordi-
nate straightforwardly show that the offset field has
learned the position information and the size informa-
tion of the objects in the basic learning of the object
detectors without any direct supervision on the offset
fields. The position of objects is global information,
so it can be represented by d
f
(p
0
) as shown in Figure
2. In the meanwhile, the size of the object is rather a
local information, as shown in Figure 3.
4 ABLATION STUDY OF d
f
AND
d
k
We trained our detectors on the 118k images of
the COCO 2017 train dataset and evaluated the
performance on the 5k images of the validation
dataset. The standard mean average-precision over
IoU=0.5:0.05:0.95 is used to measure the perfor-
mance of the detectors.
The Faster R-CNN and the Mask R-CNN are cho-
sen as two baselines representing the use of the de-
formable convolution in object detectors. The imple-
mentation is based on the MMDetection framework.
The Faster R-CNN detector is trained with stochas-
tic gradient descent optimizer over 2 GPUs with a to-
tal batch size of 8 images per mini batch. The Mask
R-CNN detector is trained over 2 GPUs with a to-
tal batch size of 4 images per mini batch. The ”1×”
schedule is adopted for learning rate. No test time
augmentation is used and non-maximum suppression
IoU threshold of 0.5 is employed for both detectors.
Both the d
f
and the d
k
adjust how the convolution
sees the feature map. The d
f
changes the receptive
field globally while the d
k
changes it locally inside
each kernel. To investigate the performance of the
d
f
and the d
k
in the offset fields of deformable con-
volution, experiments are conducted in Mask RCNN
and Faster RCNN detectors with either d
f
or d
k
. The
Revisiting the Deformable Convolution by Visualization
193

Figure 3: The visualization of the offset field in deformable convolution for the kernel point of view. The size of the circle for
each point represents the expansion or shrinkage inside each, in other words, the size of the circle represents the area of the
offset field inside each 3×3 kernel.
detectors are still trained end to end, and the new off-
set field are calculated by Equation 2 and Equation
3 respectively. The performance are shown in Table
1. The major contribution of deformable convolution
comes from the d
k
while the d
f
also improves the per-
formance compared with the baseline detectors with-
out the deformable convolution. Although from the
visualization of d
k
and d
f
in 3 and 2, both compo-
nents have learned the information of the object, the
ablation studies show that the local information en-
coded in d
k
is more significant than the d
f
and the
global information in d
f
may not be well utilized in
the following parts of the networks.
Table 1: The effect of the d
f
and the d
k
.
baseline d
f
d
k
AP
bbox
AP
segm
Mask RCNN 0.382 0.347
X 0.388 0.351
X 0.418 0.375
X X 0.420 0.376
Faster RCNN 0.374 NA
X 0.380 NA
X 0.413 NA
X X 0.416 NA
5 FUTURE WORK
The visualization and analysis in this work show the
effects of the deformable convolution in predicting
the size and the position of the object. It should be
noted that the deformable convolution learns the two
sources of information without direct supervision and
the automatically learned information is all from its
natural usage of the offset field. Therefore, the fu-
ture work includes (1) the study of the behaviour of
the deformable convolution when direct supervision
is enforced on the offset field; (2) utilization of the
two properties of the offset fields in the prediction
branches of bounding box and mask.
6 CONCLUSION
In summary, the detailed visualization and analysis of
the offset field are made to promote the straightfor-
ward understanding of the deformable convolution.
For the object detector, even a single deformable con-
volution has convey the information of object position
ICPRAM 2021 - 10th International Conference on Pattern Recognition Applications and Methods
194

and object size. We directly prove this by visualizing
the offset field in the feature map viewpoint and the
kernel viewpoint separately. The position of the ob-
ject is global information which is in the feature map
viewpoint while the size of the object is local infor-
mation which is in the kernel viewpoint. The effect of
the offset field in the two viewpoints is investigated
separately and the results show the components in the
kernel viewpoint improves the deformable convolu-
tion more.
REFERENCES
Chen, Y., Zhang, Z., Cao, Y., Wang, L., Lin, S., and
Hu, H. (2020). Reppoints v2: Verification meets
regression for object detection. arXiv preprint
arXiv:2007.08508.
Dai, J., Qi, H., Xiong, Y., Li, Y., Zhang, G., Hu, H., and
Wei, Y. (2017). Deformable convolutional networks.
In Proceedings of the IEEE international conference
on computer vision, pages 764–773.
Gao, H., Zhu, X., Lin, S., and Dai, J. (2019). Deformable
kernels: Adapting effective receptive fields for object
deformation. arXiv preprint arXiv:1910.02940.
Kong, T., Sun, F., Liu, H., Jiang, Y., Li, L., and Shi,
J. (2020). Foveabox: Beyound anchor-based object
detection. IEEE Transactions on Image Processing,
29:7389–7398.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ” why
should i trust you?” explaining the predictions of any
classifier. In Proceedings of the 22nd ACM SIGKDD
international conference on knowledge discovery and
data mining, pages 1135–1144.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Thomas, H., Qi, C. R., Deschaud, J.-E., Marcotegui, B.,
Goulette, F., and Guibas, L. J. (2019). Kpconv: Flex-
ible and deformable convolution for point clouds. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 6411–6420.
Vu, T., Jang, H., Pham, T. X., and Yoo, C. (2019). Cas-
cade rpn: Delving into high-quality region proposal
network with adaptive convolution. In Advances in
Neural Information Processing Systems, pages 1432–
1442.
Wang, H., Wang, Z., Du, M., Yang, F., Zhang, Z., Ding, S.,
Mardziel, P., and Hu, X. (2020). Score-cam: Score-
weighted visual explanations for convolutional neu-
ral networks. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 24–25.
Wang, J., Chen, K., Yang, S., Loy, C. C., and Lin, D. (2019).
Region proposal by guided anchoring. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 2965–2974.
Yang, Z., Liu, S., Hu, H., Wang, L., and Lin, S. (2019a).
Reppoints: Point set representation for object detec-
tion. In Proceedings of the IEEE International Con-
ference on Computer Vision, pages 9657–9666.
Yang, Z., Xu, Y., Xue, H., Zhang, Z., Urtasun, R., Wang, L.,
Lin, S., and Hu, H. (2019b). Dense reppoints: Rep-
resenting visual objects with dense point sets. arXiv
preprint arXiv:1912.11473.
Zeiler, M. D. and Fergus, R. (2014). Visualizing and under-
standing convolutional networks. In European confer-
ence on computer vision, pages 818–833. Springer.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Tor-
ralba, A. (2016). Learning deep features for discrim-
inative localization. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2921–2929.
Zhu, X., Hu, H., Lin, S., and Dai, J. (2019). Deformable
convnets v2: More deformable, better results. In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 9308–9316.
Revisiting the Deformable Convolution by Visualization
195
