On the Application of Safe-Interval Path Planning to a Variant of the
Pickup and Delivery Problem
Konstantin Yakovlev
1,2 a
, Anton Andreychuk
1,3 b
, Tom
´
a
ˇ
s Rybeck
´
y
4 c
and Miroslav Kulich
4 d
1
Federal Reseach Center for Computer Science and Control of Russian Academy of Sciences, Russia
2
Moscow Institute of Physics and Technology, Russia
3
Peoples’ Friendship University of Russia (RUDN), Russia
4
Czech Institute of Informatics, Robotics, and Cybernetics, Czech Technical University, Czech Republic
Keywords:
Multi-robot Systems, Safe-Interval Path Planning, Multi-agent Path Finding, Automated Warehouses.
Abstract:
We address a variant of multi-agent pickup and delivery problem and decouple into two parts: task allocation
and path planning. We employ the any-angle Safe-Interval Path Planning algorithm introduced in our recent
work and study the performance of several task allocation strategies. Furthermore, the proposed approach has
been integrated into a control system to verify its feasibility in deployment on real robots. A key part of the
system is a visual localization system which is based on the detection of unique artificial markers placed in
the working environment. The conducted experiments show that generated plans can be safely executed on a
real system.
1 INTRODUCTION
Multi-robot systems are gaining much attention re-
cently as they can effectively be used for search-and-
rescue (Kulich et al., 2017; Krajn
´
ık et al., 2015), ex-
ploration (Faigl and Kulich, 2013), logistics (Wurman
et al., 2008). The latter is a domain where robotic
systems are already widespread, especially when it
comes to the automated warehouses where the fleet
of mobile robots replace human workers in order to
increase the throughput, see (Roodbergen and Vis,
2009) for an overview.
One of the core problems in the context of auto-
mated warehouses is to ensure safe navigation of mul-
tiple robots w.r.t. both static (shelves, sorting stations
etc.) and dynamic (other robots) obstacles. This prob-
lem is commonly tackled by introducing a centralized
controller that plans collision-free trajectories before-
hand and assuming that robots will follow them accu-
rately enough. Thus the problem boils down to multi-
robot path planning, which is known to be an NP-hard
problem even in the simplest cases, e.g. when the
disk-shaped robots move with constant speed among
a
https://orcid.org/0000-0002-4377-321X
b
https://orcid.org/0000-0001-5320-4603
c
https://orcid.org/0000-0002-5019-9260
d
https://orcid.org/0000-0002-0997-5889
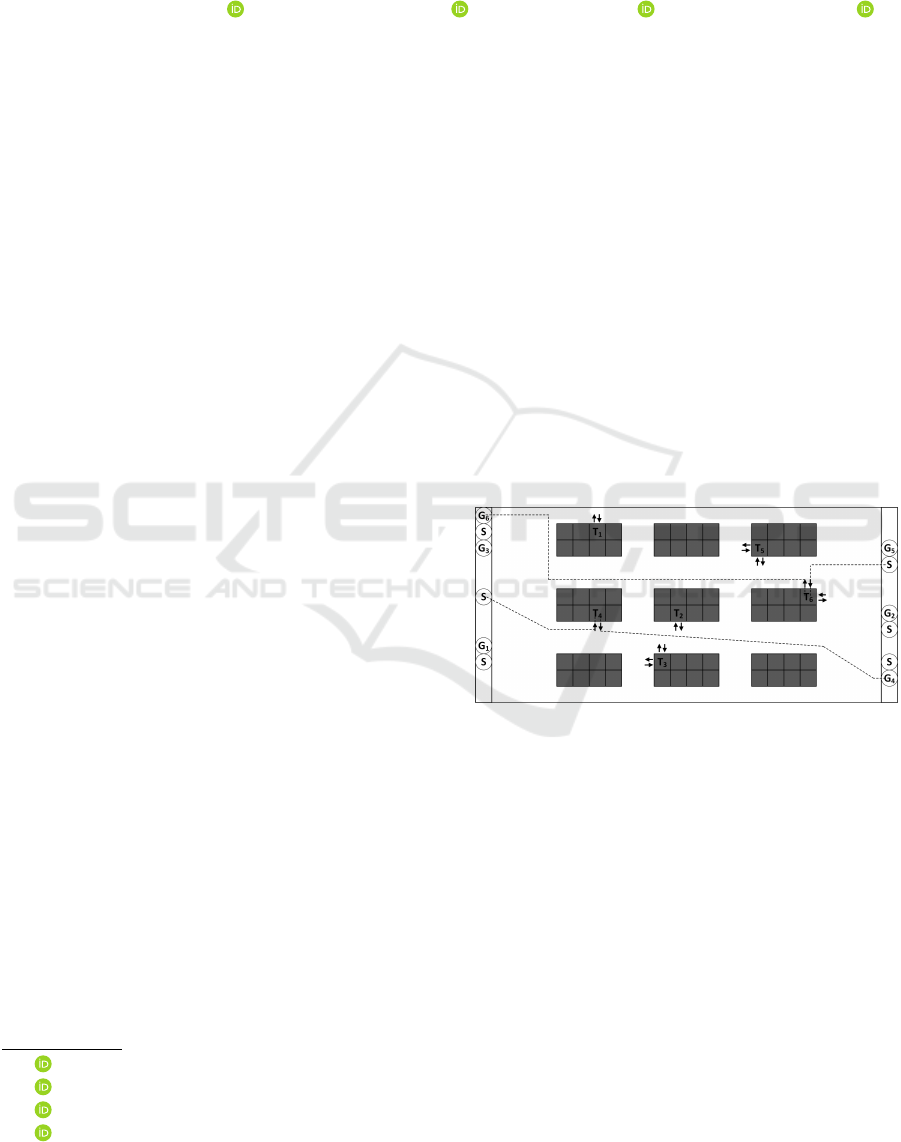
Figure 1: Multi-Agent pickup and delivery instance. Stor-
age areas are depicted in gray. They contain pallets (T) that
have to be delivered to the sorting stations (G). Robots ini-
tial locations are marked with S. Arrows show the locations
from which robots can go under a pallet to lift it. Two types
of paths are shown by dashed lines: the one that contains
only cardinal moves and the one that contains any-angle
moves.
polygonal obstacles (Spirakis and Yap, 1984).
A discretized version of the problem is typically
solved when the robots are confined to a graph and al-
lowed to move only following the edges of this graph.
Still, even the discretized version of the problem, of-
ten named multi-agent path finding (MAPF), is NP-
hard to solve optimally for a range of critical objec-
tive functions, such as the makespan – the time by
which the last agent reaches its goal, and the flowtime
– the sum of execution times across the agents (Yu
and LaValle, 2016). Indeed the planners that are able
Yakovlev, K., Andreychuk, A., Rybecký, T. and Kulich, M.
On the Application of Safe-Interval Path Planning to a Variant of the Pickup and Delivery Problem.
DOI: 10.5220/0009888905210528
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 521-528
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
521

to find cost-optimal solutions for both of these objec-
tives exist, but they scale poorly to a large number of
robots.
From a practical point of view, it is reasonable to
trade-off optimality for the runtime. A widespread
approach to do this is to rely on prioritized planning
(PP) (Erdmann and Lozano-P
´
erez, 1987), when the
solver plans individual trajectories of the robots se-
quentially one after the other in some fixed order. This
speeds up the search significantly as at each iteration
previously planned trajectories are considered to be
fixed. The main drawback is that prioritized plan-
ning is incomplete. However, for a large class of the
MAPF problems, i.e. the ones that involve planning
in the well-formed infrastructures, PP guarantees to
find a solution (if one exists) (
ˇ
C
´
ap et al., 2015). Coin-
cidentally, the warehouse environments are designed
to obey the rules of the well-formed infrastructures in
the vast majority of cases, so the prioritized planning
fits very well to this domain.
Another advantage of the prioritized planning is
that it can rely on the advanced single-agent path-
finding algorithms, e.g. Safe interval path-planning
(SIPP) (Phillips and Likhachev, 2011), that allow lift-
ing numerous limiting assumptions, often adopted by
the optimal MAPF solvers, e.g. wait actions of the
uniform duration.
In this work, we extend previous research on pri-
oritized multi-agent path planning with continuous
time and kinematic constraints by considering the ap-
plication of this approach to a variant of multi-agent
pickup and delivery (MAPD) problem arising in the
context of automated warehouses. In the studied set-
ting robots have to pick up goods that are distributed
over the specified zone and deliver them to the sort-
ing stations. Thus, a combination of task alloca-
tion and multi-agent path-finding is needed to accom-
plish the mission. We suggest and evaluate a range
of heuristics for task allocation. For path planning,
we use a state-of-the-art prioritized planner – AA-
SIPP(m) (Yakovlev et al., 2019) relying on its flex-
ibility to produce different types of trajectories, i.e.
the one that contain any-angle moves and the one that
allows only movements into the cardinal direction.
We analyze the efficiency of the suggested ap-
proach in a simulation, where we run experiments
with up to 164 robots. We also evaluate how the con-
structed plans can be executed on the real-word dif-
ferential drive robots, commonly used in robotics re-
search – Turtlebots 2 (Open Source Robotics Founda-
tion, Inc., 2020). Unlike numerous works that rely on
the external centralized navigation system, we show
that the trajectories produced by the considered algo-
rithm are accurately executed by Turtlebots relying on
the local vision-based navigation system.
2 RELATED WORK
In the recent decade, a range of prominent multi-agent
path finding algorithms has been proposed. Search-
based approaches, such as as A*+ID+OD (Standley,
2010), M* (Wagner and Choset, 2011), CBS (Sharon
et al., 2015) are typically aimed at finding optimal so-
lutions. They do not scale well to the problems in-
volving a large number of agents, though their sub-
optimal variants, e.g. ECBS (Barer et al., 2014), mit-
igate this issue to a certain extent. When optimality
is sacrificed, polynomial-time algorithms can be pro-
posed, that treat multi-agent path planning as a peb-
ble motion problem. Push-and-rotate (de Wilde et al.,
2013) is a prominent algorithm of this kind. Its main
drawback is that it assumes a sequential movement of
pebbles (robots). thus the cost of the solution is very
high in practice. In (Kulich et al., 2019) an extension
to this algorithm was proposed that supports paral-
lel movements. Overall, most of the aforementioned
algorithms assume discrete time, uniform-cost transi-
tions and do not take kinematic constraints into ac-
count. Most recent algorithms, introduced in (Cohen
et al., 2019; Andreychuk et al., 2019; Hv
ˇ
ezda et al.,
2018a; Hv
ˇ
ezda et al., 2019), lift these assumptions but
are very computationally intensive.
Prioritized planning (Erdmann and Lozano-P
´
erez,
1987) is an appealing alternative, when kinematic
constraints should be taken into account, as it is com-
putationally less burdensome, scales well and is com-
plete under certain conditions that often hold in prac-
tice (
ˇ
C
´
ap et al., 2015). In (Andreychuk et al., 2019)
a road-map based planner supporting different mov-
ing speeds was suggested, in (Yakovlev and Andrey-
chuk, 2017) grid-based planner capable of handling
any-angle moves was proposed. The latter was ex-
tended in (Yakovlev et al., 2019) to handle kinematic
constraints such as agents’ size, rotation and transla-
tion speed. This work builds on the latter algorithm.
Among the works that study the application of
multi-agent path finding algorithms to the problems
arising in the context of automated warehouses, one
can name the following. In (Ma et al., 2017) a lifelong
variant of the multi-agent path finding problem with
uniform-cost actions was investigated. In the subse-
quent work (Ma et al., 2019) it was extended to handle
different moving speeds of the agents. However, they
were allowed to move only in cardinal directions on
a grid. In (Ma and Koenig, 2016; H
¨
onig et al., 2018)
both target assignment and path planning for teams of
agents were considered. Time was discretized in these
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
522

works, while we assume a continuous timeline.
3 PROBLEM STATEMENT
Consider n robots operating in the environment dis-
cretized to a grid. Each robot is modelled as a disk and
is initially positioned at the center of a grid cell. The
following actions constitute a robot’s action set: wait,
rotate, move (translate). Robots are allowed to wait
and rotate only at the centers of grid cells. Moving
is allowed from the center of one cell to the center of
the other following the straight line connecting them,
hence – translate. The duration of rotate and move
actions is defined by the endpoint configurations, e.g.
the duration of a translate action is the distance be-
tween the move’s endpoints divided by the robot’s
translation speed. Inertial effects are neglected. The
duration of a wait action is arbitrary, i.e. a robot can
wait for any amount of time at a grid cell. The time-
line is continuous.
The plan for a robot is a sequence of the timed ac-
tions: π = (a
1
, t
1
), ..., (a
k
, t
k
), s.t. t
j+1
−t
j
= dur(a
j
),
where (a
j
, t
j
) represents an action that starts at time
moment t
j
and dur stands for the duration of an ac-
tion. The cost of a plan is its duration: c(π) =
t
k
+ dur(a
k
). Two plans are called collision free iff
the robots that follow them never collide. A set of
plans, Π = {π
1
, ..., π
n
} is collision free if any pair of
the constituent plans is collision-free. Cost for Π is
either the makespan: C(Π) = max{c(π
1
), ..., c(π
n
)},
or the flowtime: C(Π) = c(π
1
) + ... + c(π
n
).
Two types of designated areas are present in the
workspace: sorting stations and storage areas. The
cells that form them are assumed to be distributed in
a well-formed infrastructure (
ˇ
C
´
ap et al., 2015). This
means that there always exists a path for a robot be-
tween any of these cells that avoids other robots in
case they are positioned in any other sorting/storage
cell. An example of the well-formed infrastructure
is shown in Fig. 1. Cells that form the storage ar-
eas are assumed to contain pallets with goods (one
pallet per cell), hence the robots can’t move through
them. However to load a pallet a robot can roll under
it. n storage cells are distinguished and it’s assumed
that they contain pallets that need to be carried to the
sorting stations. Each pallet has to be delivered to a
particular sorting station. We will call the former the
sub-goals, and the latter - the goals.
The multi-agent pickup and delivery (MAPD)
problem we are considering in this work can now
be formulated as follows. Given n starting locations,
sub-goals and goals the task is to find n collision-free
plans (one for each robot) from start to sub-goal to
goal. It is not required to solve the problem optimally
w.r.t. flowtime (or makespan). However, lower-cost
solutions are, obviously, preferable.
4 METHOD
We suggest the following decoupled approach to
solve the considered MAPD problem. First, the
sub-goals are distributed among the robots, and then
collision-free plans are found by a prioritized planner.
By solving assignment and planning problems inde-
pendently, we, obviously, can not provide any guaran-
tees on optimality. On the other hand, such approach
is fast, which is critical for real-world applications.
4.1 Task Allocation
Indeed, there exist algorithms that solve an assign-
ment problem optimally, e.g. the Hungarian method
(Kuhn, 1956). However, these methods typically re-
quire the cost associated with each allocation to be
known. In our scenario to get this cost one needs
to solve the multi-agent pathfinding problem for all
n robots and sub-goals (pallets), which is computa-
tionally expensive. Instead, we suggest the following
greedy approach to assign sub-goals to robots. We
iterate over the robots and at each step assign a sub-
goal to the current robot by the virtue of a select func-
tion, select(s
i
, l
1
, ..., l
n
). The input of the latter is
the start position of the current robot and all the sub-
goals’ positions. The output is a sub-goal assignment,
i.e. l
j
that is assigned to robot i. We suggest the fol-
lowing select functions.
Basic implementation of a select function may
simply return random sub-goal out of the sub-goals
that have not been assigned so far. A more intelli-
gent approach is to compute the Euclidean distances
between all of the unassigned sub-goals and the cur-
rent robot and choose the sub-goal with the minimal
computed distance. Intuitively, by following this ap-
proach, we minimize the travel time of a robot to a
sub-goal. However, in this case, static obstacles, i.e.
the cells that constitute the storage area, are not taken
into account. To mitigate this issue a more involved
implementation of a select function can be proposed
that relies on invoking a path planning algorithm that
finds the shortest path between the start location of
the robot and each of the sub-goals. Then the sub-
goal with the minimal computed cost is selected. In-
deed, this approach is more computationally expen-
sive, compared to the previous ones. On the other
hand, it’s likely to be more accurate in estimating the
actual time needed for each robot to reach a respective
On the Application of Safe-Interval Path Planning to a Variant of the Pickup and Delivery Problem
523
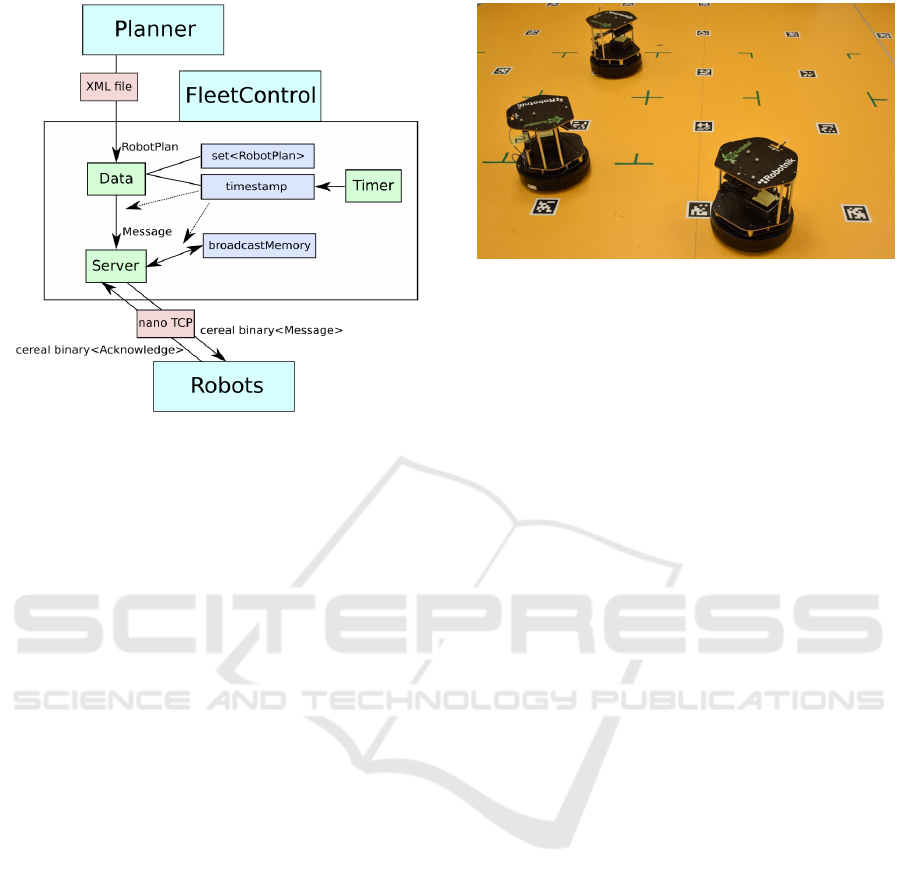
Figure 2: FleetControl scheme.
sub-goal and, as a result, the overall mission comple-
tion time is likely to be lowered down. The experi-
ments that we carried out confirm this hypothesis.
4.2 Multi-agent Path Planning
To find collision-free plans from the robots’ start lo-
cations to the assigned sub-goals (pallets) and then to
the corresponding goal locations (sorting stations) we
suggest using the prioritized planning (PP) approach
as it is known to work fast and scale well to a large
number of robots (up to hundreds).
In PP, each robot is assigned a priority first and
then plans are constructed sequentially in accordance
with the imposed priority ordering. Different ways to
assign priorities can be proposed. One of the common
ways to do so is based on computing the distances be-
tween the robots and their goals. It is known from
previous research that assigning higher priorities to
the robots with lower distances positively influences
the flowtime, and doing the same for the robots with
higher distances – the makespan (Andreychuk and
Yakovlev, 2018). When time permits, one can also try
running the planning algorithm with a range of var-
ious assignments in an attempt to decrease the cost
of the resultant solution (Bennewitz et al., 2002). A
more sophisticated approach is presented in (Hv
ˇ
ezda
et al., 2018b), where priorities are dynamically re-
computed based on how the robot influences the tra-
jectories of already planned robots.
When priorities are fixed, a planner finds a
collision-free plan for each agent one by one. Once
the plan for agent i is found it’s considered to be fixed,
and the agents i + 1, i + 2, ... n have to avoid colli-
Figure 3: Turtlebots operating in an environment with
AprilTags.
sion with i by modifying their own plans, not ith. In
general, this approach does not provide completeness
guarantees. However, for the well-formed infrastruc-
tures, PP is guaranteed to find a solution, if one exists,
provided that the individual planner explicitly avoids
start locations of all robots (
ˇ
C
´
ap et al., 2015). In this
work, we consider only well-formed infrastructures
and thus follow this rule.
The task of finding a valid plan for a robot that
avoids collisions with previously planned robots can
be solved by any planner that takes time dimension
into account. In the simplest case, when time is dis-
cretized and only cardinal translations and rotation on
90
◦
are allowed, A* (Hart et al., 1968) can be adopted
to solve the problem. The search state, in this case,
consists of the configuration-time pairs. At each step,
the planner reasons whether the adjacent configura-
tions are reachable in the next time step, i.e. whether
such transitions do not conflict with the given con-
straints induced by the higher-priority robots. An al-
ternative to staying in the same configuration, i.e. to
wait, should also be considered. Obviously, searching
in such a search-state is a computationally intensive
task as the number of states is huge.
In (Silver, 2005) a modification of the described
approach, named WHCA*, was suggested that in-
troduces a time-window and considers time dimen-
sion only when planning inside this window. A
more advanced approach, known as Safe-Interval
Path Planning (SIPP), was suggested in (Phillips and
Likhachev, 2011). The idea of SIPP is to group for
each configuration the time steps at which no colli-
sion happens and to make search-nodes out of these
intervals. I.e. each search node is a tuple hc f g, [t
b
, t
e
]i,
where c f g is the configuration of the robot and [t
b
, t
e
]
– is the safe interval for that configuration. Endpoints
of the interval are computed taking the trajectories
of the dynamic obstacles (high-priority robots) into
account. SIPP significantly reduces search effort as
now the number of the search-states corresponding to
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
524

a single configuration is proportional not to the total
number of time-steps, but to the number of dynamic
obstacles that interfere with that configuration.
A nice property of SIPP is that it can be naturally
extended to handle non-discretized, i.e. continuous,
time as the endpoints of the intervals are not restricted
by the algorithm to be integers. This, in turn, provides
a pathway to handle any-angle moves (Yakovlev and
Andreychuk, 2017), translations and rotations of arbi-
trary duration etc. In this work, we employ one of the
latest modifications of SIPP, suggested in (Yakovlev
et al., 2019), that supports planning with a wide range
of kinematic constraints by explicitly reasoning about
the velocities of the agents, their sizes, etc.
5 CONTROL SYSTEM
The proposed planning approach has been integrated
into a control system to allow testing and evaluation
of the planner with real robots. Its first component
is the planner which is given a set of assignments for
the agents, a map and a configuration. The planner
then provides a set of timed plans for the agents –
robots. These plans are processed by the FleetControl
module that transforms them into messages to be sent
to the robots at a specified time. The robots localize
themselves by fusing data from a camera and odome-
try. Based on the knowledge of their current location,
they navigate to a target given by the last command.
5.1 FleetControl System
The architecture of the FleetControl is depicted in
Fig. 2. It loads a file with plans for the agents and
transforms them to timed commands for robots. The
format of all commands is the same: the start and tar-
get locations and orientations, execution time and an
ordinal number. The expected execution time of the
command is used to maintain robot’s average speed,
which is vital to fulfill the plan as expected by the
collision-avoiding planner.
The time when a command should be sent is de-
termined by the duration of the preceding commands.
The commands for each robot are put in a queue that
is sorted by their execution start. The queues and
other state variables are stored in Data.
The Server and Timer threads are started, after the
plans are loaded. The Timer thread maintains a fre-
quency of 100 Hz in increasing the timestamp of the
system. The timestamp is also stored in Data to deter-
mine when to send new commands to robots.
The Server thread maintains the communication
with the robots, which is performed over TCP mak-
ing use nanomsg library. The time-ordered queue of
commands for robots is also checked by Server which
sends them to the correct robot in a given time. The
commands are serialized to a binary format making
use the cereal library.
Correct reception of commands by robots is en-
sured by a broadcast memory and a timer mechanism.
This remembers the last command sent to each robot
and if the robot does not confirm its reception within
a set time, the command is sent again.
5.2 Robot Localization and Control
The robots are entirely driven by ROS (Quigley et al.,
2009): standard ROS packages together with the ones
designed for the described scenario are used. The
central ROS node is used for navigation and com-
munication with FleetControl. It listens on a TCP
client socket to new commands from FleetControl.
Whenever a previous command is completed, the ac-
knowledgement of the reception and a new deserial-
ized command for execution are sent to FleetControl.
The localization is carried out in two ways. The
odometry is used for continuous localization, al-
though it is prone to inaccuracy and growing errors.
To provide absolute localization, robots are equipped
with cameras, and detection of fiducial markers is em-
ployed. Specifically, a set of visually detectable and
unique markers - AprilTags (Wang and Olson, 2016)
is placed in the environment and the positions of these
markers are stored. Whenever some marker is de-
tected in a camera image and its ID is recognized, the
absolute robot position is retrieved from the stored ab-
solute position of the marker, a position of the marker
in the image, and the relative position of the cam-
era to the robot. Decoding of AprilTag information
from a camera image is done by the apriltag ros
package (http://wiki.ros.org/apriltag ros).
The Navigator receives updates of a relative robot
position and determines the current absolute robot lo-
cation and orientation in the map. This information is
used as the robot pose when no tag is visible and thus
AprilTag-based localization does not provide data.
Regulation errors – the deviation in the desired
orientation to the current goal and the expected and
real traveled distance based on expected average
speed – are computed from the robot position. A pro-
portional controller is used to control robot speed:
u
speed
(t) = K
P
e
speed
(t), (1)
while robot steering is controoled by a PI controller:
u
steer
(t) = K
P
e
steer
(t) + K
I
Z
t
0
e
steer
(t
0
)dt
0
. (2)
On the Application of Safe-Interval Path Planning to a Variant of the Pickup and Delivery Problem
525

K
P
and K
I
denote the proportional and integral co-
efficients respectively, while e
x
are the regulation er-
rors. The controllers ensure navigation towards the
goal with the defined precision and its attainment in
the desired time.
6 EXPERIMENTAL EVALUATION
6.1 Simulation Experiments
We used a 170 × 84 grid map from the Mov-
ing AI repository (Stern et al., 2019) –
warehouse-10-20-10-2-2 – that represents a
warehouse environment with racks, passages be-
tween them and two open areas on the borders of the
map. We generated 100 scenarios, each containing
164 unique start, sub-goal and goal locations. Start
and goal were placed randomly in the right and
left column of the grid, sub-goals were randomly
distributed across the racks. To generate instances
involving n number of robots we took first n start-
subgoal-goal triplets out of the generated scenarios.
100 different instances for each number of agents
were generated. Two different action models were
considered: the one that allows only cardinal moves
and the one that allows any-angle moves. Translation
speed was set to be one cell per time unit, rotation
speed – π radians per time unit. In each experiment
we measured the following indicators: algorithm’s
runtime, resultant flowtime and makespan.
Fig. 4 depicts the results for cardinal-only motion
model. Three lines on the plots correspond to differ-
ent task allocation strategies: random, when the sub-
goals were assigned randomly; without obs, when
the sub-goals were assigned based on the computation
of Euclidean distance; with obs, when sub-goals as-
signment involved path planning with A* algorithm.
In the latter case we also measured the breakdown be-
tween the task assignment and path finding – see the
right chart on Fig. 4.
As one can see, the task assignment strategy has
a significant impact on the performance of the al-
gorithm. For example, the difference in flowtime
between random and without obs is 15% for 164
agents and the difference between random and with
obs is even more articulated – up to 30% for 164
agents. Trends for the makespan are similar. In terms
of runtime, the best results were achieved by without
obs. However, the difference between without obs
and with obs is not significant (10% on average).
Please also note, that a significant portion of the run-
time is spent on task allocation when with obs strat-
egy is utilized (see the right-most plot on Fig. 4.)
Fig. 5 depicts the results for any-angle motion
model. In this case, we evaluated an additional task
allocation strategy – with obs any-angle – which
relies on finding paths with Theta* (Nash et al., 2007)
not A* to assign sub-goals. In general, the trends are
similar to the previous ones: the more involved strat-
egy to assign sub-goals is used – the better results are
in terms of solution cost. Interestingly runtime for the
with obs any-angle is lower compared to without
obs. It means that investing time in path planning at
the stage of task allocation pays off in the considered
setting. Two right plots in Fig. 5 show that any-angle
planning for task assignment is, indeed, more time-
consuming.
Comparing the results of both experiments, one
can note that the difference in flowtime and makespan
between the action models is about 10%. This is due
to the the open areas on the borders of the map in
which robots can move into arbitrary directions short-
ening their paths.
6.2 Verification on Real Robots
Suggested approach was verified on a fleet of real
robots in a laboratory setup. The robots used were
Kobuki TurtleBot2 equipped with an Intel NUC PC
and Orbbec Astra camera. The camera provides
1280 × 960 RGB images at the frequency of 10FPS.
Intrinsic/extrinsic parameters of the camera have been
identified, and camera distortion was removed before
processing by the AprilTag detector.
The laboratory setup serving for the demonstrator
has been populated with a grid consisting of AprilT-
ags (type Tag36h11) on the floor as shown in Fig. 3.
The unique tags were placed equidistantly with 70 cm
gaps, and their positions were stored in an XML map.
The planner was given a situation with six agents
and six tasks as depicted in Fig. 6. Each task con-
sisted in a pickup of an item (the colored boxes) and
delivering it to the specified position (the triangles).
The plans and the task assignment were done by the
proposed planner. The speed of the agents was as ex-
pected by the planner, so they were able to keep safe
distance without being able to perceive their peers.
The location and orientation deviations did not exceed
the set thresholds during the entire experiment, which
were set to 5cm for the position error tolerance and
0.02 radians for the orientation error tolerance.
Generally, the proposed planner proved to be a
flexible and versatile tool in practice. After ap-
propriate tuning, it was capable of providing ro-
bust solutions that were safely executed by real
robots. Video of the experiment can be found at
youtu.be/siRl0TlGLtQ.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
526
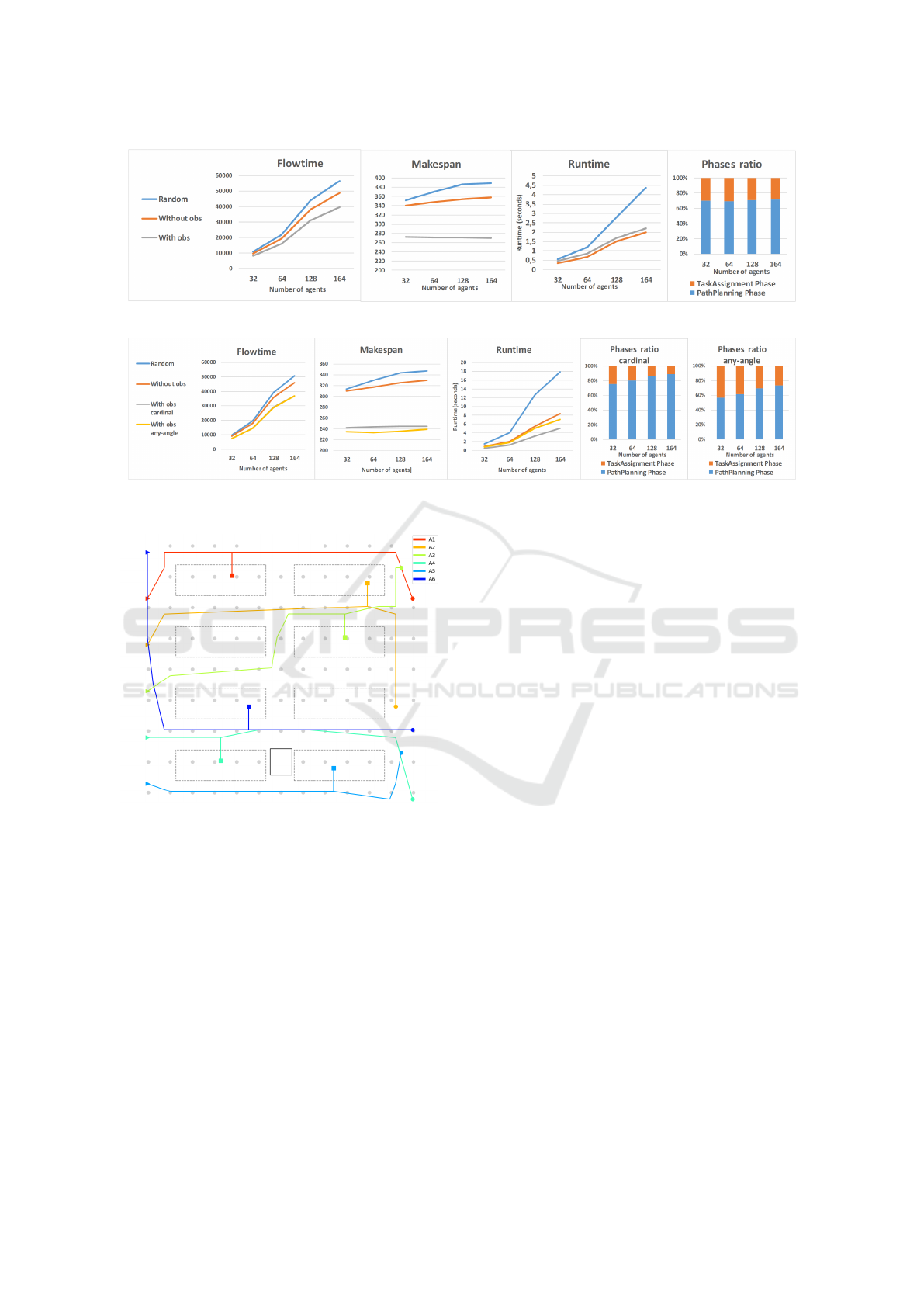
Figure 4: Experimental results when cardinal-only moves were allowed.
Figure 5: Experimental results when any-angle moves were allowed.
Figure 6: The experiment setup.
7 CONCLUSIONS
In this work, we examined a variant of the multi-
agent pickup and delivery problem that arises in the
context of automated warehouses. We suggested and
evaluated a range of task allocation strategies paired
with state-of-the-art multi-agent path finding algo-
rithm that takes kinematic constraints into account.
We conducted experiments on real robots that rely on
a local vision-based localization system for naviga-
tion and plan execution. A prominent direction for
future research is examining a lifelong variant of the
problem (when sub-goals and goals appear on an on-
going basis) and conducting experiments with a larger
number of real robots.
ACKNOWLEDGEMENTS
The work of Tom
´
a
ˇ
s Rybeck
´
y and Miroslav Kulich
has been supported by the European Union’s Hori-
zon 2020 research and innovation programme under
grant agreement No 688117 and by the European Re-
gional Development Fund under the project Robotics
for Industry 4.0 (reg. no. CZ.02.1.01/0.0/0.0/15
003/0000470). Konstantin Yakovlev and Anton An-
dreychuk were supported by the Russian Foundation
for Basic Research (project 17-29-07053) and special
program of the presidium of Russian Academy of Sci-
ences. Anton Andreychuk is also supported by the
“RUDN University Program 5-100”.
REFERENCES
Andreychuk, A. and Yakovlev, K. (2018). Two techniques
that enhance the performance of multi-robot priori-
tized path planning. In Proc. of the 17th Int. Conf. on
Autonomous Agents and MultiAgent Systems (AAMAS
2018), pages 2177–2179.
Andreychuk, A., Yakovlev, K., Atzmon, D., and Stern, R.
(2019). Multi-agent pathfinding with continuous time.
In Proc. of the 28th Int. Joint Conf. on Artificial Intel-
ligence (IJCAI 2019), pages 39–45.
Barer, M., Sharon, G., Stern, R., and Felner, A. (2014). Sub-
optimal variants of the conflict-based search algorithm
for the multi-agent pathfinding problem. In Proc. of
the 7th Symp. on Combinatorial Search, pages 19–27.
Bennewitz, M., Burgard, W., and Thrun, S. (2002). Find-
ing and optimizing solvable priority schemes for de-
coupled path planning techniques for teams of mobile
robots. Robotics and autonom. systems, 41(2):89–99.
On the Application of Safe-Interval Path Planning to a Variant of the Pickup and Delivery Problem
527

ˇ
C
´
ap, M., Nov
´
ak, P., Kleiner, A., and Seleck
´
y, M. (2015).
Prioritized planning algorithms for trajectory coordi-
nation of multiple mobile robots. IEEE Trans. on Au-
tomation Science and Engineering, 12(3):835–849.
Cohen, L., Uras, T., Kumar, T. S., and Koenig, S. (2019).
Optimal and bounded-suboptimal multi-agent motion
planning. In Proc. of the 12th Symposium on Combi-
natorial Search.
de Wilde, B., ter Mors, A. W., and Witteveen, C. (2013).
Push and rotate: cooperative multi-agent path plan-
ning. In Proc. of the 12th Int. Conf. on Autonomous
Agents and Multiagent Systems, pages 87–94.
Erdmann, M. and Lozano-P
´
erez, T. (1987). On multiple
moving objects. Algorithmica, 2:1419–1424.
Faigl, J. and Kulich, M. (2013). On determination of goal
candidates in frontier-based multi-robot exploration.
In Proc. of 6th European Conf. on Mobile Robots.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE transactions on Systems Science and
Cybernetics, 4(2):100–107.
H
¨
onig, W., Kiesel, S., Tinka, A., Durham, J. W., and Aya-
nian, N. (2018). Conflict-based search with optimal
task assignment. In Proc. of the 17th Int. Conf. on
Aut. Agents and Multi-Agent Systems, pages 757–765.
Hv
ˇ
ezda, J., Kulich, M., and P
ˇ
reu
ˇ
cil, L. (2018a). Improved
discrete rrt for coordinated multi-robot planning. In
Proc. of the 15th Int. Conf. on Informatics in Control,
Automation and Robotics, Madeira, PT. SciTePress.
Hv
ˇ
ezda, J., Kulich, M., and P
ˇ
reu
ˇ
cil, L. (2019). On Random-
ized Searching for Multi-robot Coordination, pages
364–383. Lecture Notes in Electrical Engineering.
Springer, Cham, CH.
Hv
ˇ
ezda, J., Rybeck
´
y, T., Kulich, M., and P
ˇ
reu
ˇ
cil, L.
(2018b). Context-aware route planning for automated
warehouses. In Proc. of 2018 21st Int. Conf. on Intel-
ligent Transportation Systems (ITSC).
Krajn
´
ık, T., Kulich, M., Mudrov
´
a, L., Ambrus, R., and
Duckett, T. (2015). Where’s Waldo at time t? Us-
ing spatio-temporal models for mobile robot search.
In 2015 IEEE Int. Conf. on Robotics and Automation
(ICRA), pages 2140–2146.
Kuhn, H. W. (1956). Variants of the hungarian method
for assignment problems. Naval Research Logistics
Quarterly, 3(4):253–258.
Kulich, M., Nov
´
ak, T., and P
ˇ
reucil, L. (2019). Push,
stop, and replan: An application of pebble motion on
graphs to planning in automated warehouses. In Proc.
of the 2019 IEEE Intelligent Transportation Systems
Conf. (ITSC 2019), pages 4456–4463.
Kulich, M., P
ˇ
reu
ˇ
cil, L., and Miranda Bront, J. J. (2017). On
multi-robot search for a stationary object. In Proc. of
ECMR 2017, Marseille, FR. IEEE.
Ma, H., H
¨
onig, W., Kumar, T. K. S., Ayanian, N., and
Koenig, S. (2019). Lifelong path planning with kine-
matic constraints for multi-agent pickup and delivery.
In Proc. of the 33rd AAAI Conf. on Artificial Intelli-
gence (AAAI 2019), page in press.
Ma, H. and Koenig, S. (2016). Optimal target assignment
and path finding for teams of agents. In Proc. of the
15th Int. Conf. on Autonomous Agents and Multiagent
Systems (AAMAS 2016), pages 1144–1152.
Ma, H., Li, J., Kumar, T. S., and Koenig, S. (2017). Lifelong
multi-agent path finding for online pickup and deliv-
ery tasks. In Proc. of the 16th Conf. on Autonomous
Agents and MultiAgent Systems, pages 837–845.
Nash, A., Daniel, K., Koenig, S., and Felner, A. (2007).
Theta*: Any-angle path planning on grids. In Proc. of
The 22nd AAAI Conf. on Artificial Intelligence (AAAI
2007), pages 1177–1183.
Open Source Robotics Foundation, Inc. (ac-
cessed April 6, 2020). Turtlebort2.
https://www.turtlebot.com/turtlebot2/.
Phillips, M. and Likhachev, M. (2011). SIPP: Safe interval
path planning for dynamic environments. In Proc. of
The 2011 IEEE Int. Conf. on Robotics and Automation
(ICRA 2011), pages 5628–5635.
Quigley, M., Conley, K., Gerkey, B. P., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. Y. (2009). ROS: an
open-source Robot Operating System. In ICRA Work-
shop on Open Source Software.
Roodbergen, K. J. and Vis, I. F. (2009). A survey of litera-
ture on automated storage and retrieval systems. Eu-
ropean journal of oper. research, 194(2):343–362.
Sharon, G., Stern, R., Felner, A., and Sturtevant., N.
(2015). Conflict-based search for optimal multiagent
path finding. Artific. Intelligence Journal, 218:40–66.
Silver, D. (2005). Cooperative pathfinding. In Proc. of
The 1st Conf. on Artificial Intelligence and Interactive
Digital Entertainment (AIIDE 2005), pages 117–122.
Spirakis, P. and Yap, C.-K. (1984). Strong NP-hardness of
moving many discs. Inf. Proc. Letters, 19(1):55–59.
Standley, T. S. (2010). Finding optimal solutions to cooper-
ative pathfinding problems. In Proc. of the 24th AAAI
Conf. on Artificial Intelligence, pages 173–178.
Stern, R., Sturtevant, N., Felner, A., Koenig, S., Ma, H.,
Walker, T., Li, J., Atzmon, D., Cohen, L., Kumar,
S., Boyarski, E., and Bartak, R. (2019). Multi-agent
pathfinding: Definitions, variants, and benchmarks.
Symp. on Combinatorial Search, pages 151–158.
Wagner, G. and Choset, H. (2011). M*: A complete
multirobot path planning algorithm with performance
bounds. In Proc. of the 2011 IEEE/RSJ Int. Conf. on
Intelligent Robots and Systems, pages 3260–3267.
Wang, J. and Olson, E. (2016). AprilTag 2: Efficient and
robust fiducial detection. In Proc. of the IEEE/RSJ
Int. Conf. on Intelligent Robots and Systems (IROS).
Wurman, P. R., D’Andrea, R., and Mountz, M. (2008). Co-
ordinating hundreds of cooperative, autonomous vehi-
cles in warehouses. AI magazine, 29(1):9–19.
Yakovlev, K. and Andreychuk, A. (2017). Any-angle
pathfinding for multiple agents based on SIPP algo-
rithm. In Proc. of The 27th Int. Conf. on Automated
Planning and Scheduling, pages 586–593.
Yakovlev, K., Andreychuk, A., and Vorobyev, V. (2019).
Prioritized multi-agent path finding for differential
drive robots. In Proc. of The 2019 European Conf.
on Mobile Robots, pages 1–6.
Yu, J. and LaValle, S. M. (2016). Optimal multirobot
path planning on graphs: Complete algorithms and
effective heuristics. IEEE Transactions on Robotics,
32(5):1163–1177.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
528
