
Self Learning Strategy for the Team Orienteering Problem (SLS-TOP)
A. Goullieux, M. Hifi and S. Sadeghsa
EPROADEA 4669, Universit de Picardie Jules Verne, Amiens, France
Keywords:
Team Orienteering Problem, Local Search, Population, Deep searching, Diversification, Self Learning,
Jumping.
Abstract:
The Team Orienteering Problem (TOP) can be viewed as a combination of both vehicle routing and knapsack
problems, where its goal is to maximize the total gained profit from the visited customers (without imposing
the visit of all customers). In this paper, a self learning strategy is considered in order to tackle the TOP,
where information provided from local optima are used to create new solutions with higher quality. Efficient
deep searching (intensification) and jumping strategy (diversification) are combined. A number of instances,
extracted from the literature, are tested with the proposed method. As shown in the experimental part, one
of the main achievement of the method is its ability to match all best bounds published in the literature by
using a considerably smaller CPU/time. Then, for the first preliminary study using both jumping self learning
strategies, encouraging results have been obtained. We hope that a hybridation with a black-box solver, like
Cplex or Gurobi, can be considered as the main future of the method for finding new bounds, especially for
large-scale instances.
1 INTRODUCTION
Team Orienteering Problem (TOP) belongs to the
combinatorial optimization problems. Where it is
considered as a particular case of the Vehicle Rout-
ing Problem (VRP). In other words, such a prob-
lem is a combination of Knapsack Problem (KP) and
VRP(Bederina and Hifi, 2017). On the one hand, the
goal of the first subproblem is to select the customers
by maximizing the total profit. On the other hand,
the second subproblem is related to searching the best
route through the selected customers by minimizing
the total travel time. Each instance of TOP consists
of a limited number of customers, number of vehicles
and an associated maximum time for each tour/travel.
Each customer has an array of three elements; two el-
ements for their corresponding coordination (x and y)
and one for their profit. A tour is a path that starts by
starting depot and ends to ending depot. A feasible
solution is a solution that (i) uses not more than the
maximum number of available vehicles, (ii) each ve-
hicle respects the maximum travel time limit and, (iii)
each customer is visited at most one time. Thus, a so-
lution must select the customers in the route to gain
the maximum profit while some customers cannot be
visited.
Given that the study of VRP and its variants are
NP-hard, thus it cannot be solved optimally in polyno-
mial time (Golden et al., 1987)(Lawler et al., 1985).
Herein, we propose a population-based approach to
handle the problem mentioned above, i.e., TOP. The
proposed approach starts by creating a population
where specific iterative structures are used. Indeed,
the structures tries to discover the solution space by
applying both deep searching and jumping strategies.
The deep searching applies a variety of neighbor oper-
ators in order to converge towards local optima. Next,
in order to overcome local optima, some diversifica-
tion operators are applied based on jumping principle.
In overall, the algorithm starts with an initial
population containing feasible solutions. Then deep
searching strategy is considered for each created fea-
sible solution. Indeed, it first minimizes the time of
the solution thanks to some neighbor operators then it
will maximize its profit by trying to add nodes in pos-
sible positions. Finally, it produces a solution called
saturated solution. A saturated solution is defined as
the one that cannot be improved when deep search-
ing is applied on it; that is, a local optima. Note that
in a saturated solution: (i) All available vehicles are
used, (ii) It is not possible to add nodes from unvisited
customers to the current solution because vehicles are
finished their maximum time limit.
During the jumping strategy, each saturated so-
lution is subjected to a local destroying procedure
which drops some visited customers. Hence, they
336
Goullieux, A., Hifi, M. and Sadeghsa, S.
Self Learning Strategy for the Team Orienteering Problem (SLS-TOP).
DOI: 10.5220/0008985703360343
In Proceedings of the 9th International Conference on Operations Research and Enterprise Systems (ICORES 2020), pages 336-343
ISBN: 978-989-758-396-4; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

will be reestablished by calling an enhancing proce-
dure that is able to achieve a new diversified solu-
tion. The jumping process around a solution, using
destroying and rebuilding, can be viewed as a diver-
sification strategy. Note also that a saturated solution
is an optimum in the valley (local optimum) but it can
also coincide with a global optimum; both destroying
and rebuilding processes are used to converge the so-
lution towards the global optima. The bounds, related
to solutions achieved at the end of the iterations (the
proposed approach), are compared to the best ones
published in the literature.
To validate the proposed approach, we compared
the achieved results to those extracted from (Chao
et al., 1996)(Tang and Miller-Hooks, 2005)(Archetti
et al., 2007)(Khemakhem et al., 2007)(Ke et al., 2008)
and (Bouly et al., 2010). Note that (Archetti et al.,
2007) and (Ke et al., 2008), represent the results
in multiple executions. Indeed, on the one hand,
(Archetti et al., 2007) proposed a solution based on
two different methods: Tabu Search (TS) and Vari-
able Neighborhood Search (VNS). They reported the
difference between best and worst profits obtained
from three executions used. On the other hand,
(Ke et al., 2008) proposed Ant Colony Optimiza-
tion (ACO) method to solve the TOP. They reported
the average of the profits obtained in multiple execu-
tions. Herein, the achieved bounds, considered as the
first preliminary study using destroying and rebuild-
ing strategies, are given in a single execution as like
as the other reported in (Chao et al., 1996) and (Tang
and Miller-Hooks, 2005).
The remainder of the paper is organized as fol-
lows. First, Section 2 exposes the literature review re-
lated to the TOP with some variants. Second, Section
3 describes a formal model of the problem studied.
Third, the proposed solution approach is presented in
Section 4. Fourth, Section 5 evaluates the behavior of
the proposed solution method through a set of bench-
mark instances taken from the literature. Finally, the
last section concludes the study and dresses some per-
spectives.
2 LITERATURE REVIEW
The Orienteering Problem (OP) was first introduced
by (Chao et al., 1996), where they described a vari-
ety of Traveling Salesman Problem (TSP) in which a
vehicle will start its trajectory from a starting point
called ”depot”. The vehicle should visit subset of
points in order to maximize the profit that gains from
each visited point. In OP, due to the time or capacity
constraints, the vehicle may not be able to visit all the
points; thus the solution method must wisely choose
the subset of points to visit. The vehicle also must
back to the starting point (or the ending depot) at the
end of its trajectory. Furthermore, the location of each
customer is fixed and each customer must be served
not more than once (for more details, the reader can
be referred to (Chao et al., 1996) and (Lawler et al.,
1985). If we consider OP with multiple vehicles, TSP
will turns into a VRP, then by adapting the feature
of choosing points, OP will be replaced with TOP. In
other words, TOP can be viewed as a generalized ver-
sion of OP with multiple vehicles where in OP the
problem will deal with only one group (Archetti et al.,
2014).
It is worthy to mention, the survey of OP by
(Vansteenwegen et al., 2011) and its extension in
(Gunawan et al., 2016). The work of (Gunawan
et al., 2016) is a comprehensive survey of new vari-
ants of OP, where they also mentioned applications
of OP and recent Benchmark instances which is
after used by many related works such as (Dang
et al., 2011), (Cheong et al., 2006) and (Bouly et al.,
2010). Herein, the used instances, are perused in
(Bouly et al., 2010),(Dang et al., 2011),(El-Hajj et al.,
2016),(Bianchessi et al., 2018) and more (To compare
the results, the interested reader can find the other ref-
erences used the same dataset, in the body of this pa-
per).
Please note that, if we redefine this problem where
the number of vehicles are variable, then it is not diffi-
cult to proof that there is a conflict between the mini-
mum number of vehicles and the maximization of the
total profit. In Multi Objective Combinatorial Opti-
mization (MOCO), the number of efficient solutions
is expected to increase exponentially; in many studies
of MOCO they used approximation solutions rather
than exact ones. Herein, the TOP is tackled as a sin-
gle objective function optimization problem, where
the study can be viewed as a first step for studying
the multi-objective optimization problem, like (Bed-
erina and Hifi, 2017). The study of (Ehrgott and
Gandibleux, 2000) can be viewed as a straightforward
of MOCO, where a comprehensive survey on it and
a discussion on their available solution methodolo-
gies are given. They also mentioned complexity of
TOP and the fact that TOP is NP hard. (Keshtkaran
et al., 2016) proposed a branch and price approach
for TOP they also compared their results with other
studies used exact methods for TOP (see (Boussier
et al., 2007)). To refer the most recent article, (Pes-
soa et al., 2019) proposed a branch and cut and price
(BCP) solver as a generic exact solver for VRP and
its variant including KP and also TOP.
In approximation methods, (Coello, 2010) counts
Self Learning Strategy for the Team Orienteering Problem (SLS-TOP)
337

more than 320 papers using population-based solu-
tion methods. On 2011,(Dang et al., 2011) made a
huge progress in TOP by presenting a Particle Swarm
Optimization (PSO) based on memetic algorithm for
TOP. The proposed approach creates a new solu-
tion based on the best founded local solution and
the global local solution. The process of creating a
new solution is based on the well known cross over
function in genetic algorithm. The very same au-
thors extended the study on 2013 with an PSO in-
spired algorithm(Dang et al., 2013b). The complete
solutions with small and large instances are avail-
able at the URL: https://www.hds.utc.fr/
∼
moukrim/
dokuwiki/en/top/ (this study also used the same
benchmark instances of TOP). In the mentioned ar-
ticles they not also provided a solution for all the in-
stances, but also they used a new developed instances
with larger dataset. (Ke et al., 2016), with a study
on 2016, also mentioned that the best founded so-
lution approach in the literature for most of the in-
stances are the ones presented in (Dang et al., 2011)
and (Dang et al., 2013b), both are inspired by the
PSO. Although their proposed algorithm uses an op-
erator called mimic operator to create a new solution
by imitating the old solutions. They also compared
their results with larger instances.
This study propose a self learning strategy in order
to create a solutions with higher quality. It proposed
an operator to imitate the solutions founded from lo-
cal optima to create new solutions.
3 PROBLEM DESCRIPTION
VRP is often represented as a directed graph, where
nodes and edges characterize the customers and
routes, respectively. Let define S = (N, R) as a fea-
sible solution, where N represents the set of unvis-
ited nodes and R = {r
1
, r
2
, .., r
m
} the set of feasible
routes, where m denotes a maximum number of vehi-
cles. A route r is defined as a permutation of visited
nodes. Each route starts from a node, called ”the start-
ing depot”, visits a subset of customers in a route and,
finally returns to the ending depot. For each route
the goal is to gain benefits from the visited customers
within a given maximum travel time. All vehicles are
assumed identical and the number of vehicles is fixed
in each dataset. The total time of each route is com-
puted by summation of travel time between the visited
nodes in the route.
Let t
i j
be the travel time between each two visited
nodes (namely i and j, where i 6= j). The total travel
time of the route r
k
will be calculated as
∑
i, j
t
i j
where
i, j are visited by vehicle k. In the given dataset the
velocity is assumed as fixed and unique; thus the time
and distance are equal.
The objective function is to maximize the gained
profit from the customers using a fixed number of ve-
hicles and fixed maximum travel time for each route.
In each feasible route
∑
i, j
t
i j
≤ T
max
, where T
max
de-
notes the maximum travel time of the stated route.
It should be noted that during the one solution time,
each customer must be served fully and in one time
and thus only one vehicle can take profit from it.
Input data associates three numbers x, y and p to
the customers, where x and y indicate the customer
coordination and, p denotes the profit that a vehicle
can gain if visits the delineated customer. Due to
the two constrains, maximum time and limited ve-
hicles, TOP will choose whether to visit a customer
or not. Herein, we assigned a ratio of attractiveness
to the customers. Such a ratio is defined as gained
profit divided by added distance if the vehicle visits
the given customer. It means that customers achiev-
ing greatest ratios of attractiveness have the priority to
be served by the vehicles. Consequently, by choosing
whether to visit the customers, the approach will act
more wisely. Hence, the problem is no longer follows
the typical VRP rule, which is to visit all the clients.
Due to the complexity of the problem (its NP-
hardness), we propose a population-based approach
with a self learning strategy, where a new idea is com-
bined with destroying and rebuilding strategy with a
local search.
4 SOLUTION APPROACH
The proposed approach uses a self learning strategy
in order to create a solutions with higher quality. In
the self learning strategy data from the past is saved
and it is used to create a new solutions. As we dis-
cussed, TOP is a multi layer combinatorial optimiza-
tion problem. It is very important to choose wisely
used parameters and methods (specially local search)
to avoid lifetime calculations. The main motivation
of the self learning strategy came with a theory that
the solution with relatively good qualities following a
similar pattern(s). With digging the literature it is also
said that a provided solutions with PSO has found an
interesting achievement in the quality of the solutions
(Dang et al., 2011). As we know, PSO finds its way
using the self best local, best local and global best lo-
cal (Dang et al., 2011)(Ke et al., 2016).
The proposed Strategy (by taking into account the
main assumptions of the PSO) uses the best founded
movement for each step of the local search (self-best),
and uses the best local optima (best-local) and the
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
338

global best founded solution (global best) as a pat-
tern to create new solutions. In this way at each iter-
ation, data from the past affects the current decision.
The process is also includes building, breaking (de-
stroying) and rebuilding a series of feasible solutions
to seek the search space with high diversification and
deep local search strategies.
The algorithm starts with an initial population and
a fitness function. Initial solutions are created using
the proposed initialization approach. It must be men-
tioned that only feasible solutions are accepted. The
value assigned to each solution is also calculated us-
ing the summation of all the profits gain from the vis-
ited customers. Quality of a solution is related to the
summation of the rout time and gained profit from all
the used vehicles. In other words the best founded so-
lution is a solution that has higher profit in a less tour
time. The process starts with one feasible solution: (i)
local search operators are used in two corresponding
steps for minimizing the travelled time and (ii) maxi-
mizing the profit by adding nodes from unvisited ones
and, (iii) a diversification procedure using a perturba-
tion strategy is applied to the current solution. There
is a rule applied in all the three mentioned process:
save the best solution.
Of course, in order to maintain certain degree of
diversify of the solutions in the population, different
strategies to create a starting population are consid-
ered (such as choosing a node randomly in Algo. 2
). It should be mentioned that the number of the solu-
tions for each iteration is fixed to the number of cus-
tomers. To maintain the number of population, only
the solutions with higher qualities is used for the next
iteration. In case of not improving after a number of
iterations, a deep diversification is applied by remov-
ing the 60 percent of the visited nodes and creating a
new solution. The algorithm stops with the stop con-
dition which is maximum number of iterations or the
calculation time. The main procedure of SLS-TOP is
given in Algo. 1
The following (sub)sections illustrate the structure
of a solution and the main steps of the proposed ap-
proach.
4.1 Solution Representation
A solution consists of some tours (routes) that each
of them starts from the starting point and ends to the
ending point. It must be mentioned, based on the liter-
ature the start and end point can be exactly the same;
however in this study, we used the benchmark data
sets where the start and end points do not have ex-
actly the same coordination. Depots are distinguish-
able with their zero profit in the database.
Algorithm 1: Self Learning Strategy-based algorithm.
1. Input: A n instance of the TOP
2. Output: The best founded feasible solution
3. Create Population of initial solution (PI)
4. Define S(b) as a Solution with maximum objec-
tive value
5. Repeat
6. set P:= the size of PI
7. set C:= φ
8. For i=1 to P do
9. S := Imitator(S(b) and the ith solution of the PI )/*
see Imitator operator
10. S := Local Search(S)
11. S:= Jumping Strategy(S)
12. set C := {S}UC
13. Replace the best achieved solution by S(b) if V(S)
¿ V(S(b))
14. End For
15. PI → C UPI
16. Update PI
17. Until The stop condition is reached
Figure 1 illustration of the solutions structure of
instance P2-04-k of (Chao et al., 1996). it is charac-
terized by 22 nodes including 2 depots and 4 vehicles.
For the best achieved configuration, the total used dis-
tance is equal to 43.044, the best profit is equal to
180, there are 12 visited customers and 8 unvisited
customers.
Figure 1: Best assignment / permutation of the instance P2-
04-k .
4.2 Initial Population
Algorithm 2 describes main steps to create an initial
population; that is, the first set of solutions represent-
ing the starting population. Later, the deep searching
strategy is applied for each created solution. In order
Self Learning Strategy for the Team Orienteering Problem (SLS-TOP)
339

to create the initial solutions, we assigned a prefer-
ence ratio to each customer. by taking into account
that each vehicle must start from the starting depot,
the preference ratio for the customers are defined as
the ratio of profit per distance from the starting depot.
The algorithm assignes one customer to each vehicle
at the time (in a parallel way). It means that vehicles
are allowed to visite only one client based on its pref-
erence ratio. Such a method of initialization tries to
create a balanced solution. As a result in a complete
solution, the number of visited customers for all vehi-
cles will be approximately equal (balanced).
4.3 Local Search
Performance of an algorithm is based on the intensifi-
cation of the obtained solution with an astute diversi-
fication procedure. Herein, the proposed local search
uses deep searching strategy to refine the quality of
the solution at hand. Local search will converge to
the solution toward the local optima. As a matter of
fact local search is a complementary procedure for the
evolutionary process. Local search is consists of two
main steps with the aim of (i) minimizing the travel
time (ii) maximizing the gained profit. Herein, we ap-
ply efficient neighborhood operators in order to inten-
sify the search process. It should be pointed out that
local search will apply for only feasible solutions and
will accept only feasible moves. Local moves in the
intensification strategy are described in what follows.
4.3.1 First Step: Time Minimization
This step searches for the permutation of the nodes
with the following operators to minimize the travel
time for each tour: This step includes the permutation
of nodes: (a) in one tour (b) between tours. However
in both cases only the visited node are involved thus
the total profit will remain fixed.
1. 2-opt local search in one tour (exchange two
nodes in a permutation)
2. 3-opt local search in one tour (exchange three
nodes with all the feasible permutations)
3. Remove one node from a tour and insert it in an-
other tour (accept the move if it decrease the sum-
mation of travel times and if it is feasible)
4. Swap a node from a tour with a node from another
tour
Once an operator finds a better solution, the new
founded solution will be replaced with the initial one
and the algorithm continus to find an other better
solution until a stop condition. All operators men-
tioned above are applied for all the visited nodes of
Algorithm 2: Initial population.
1. Define preference ratio based on ratio of attrac-
tiveness
2. For each vehicle Do
3. Create a list of nodes for the start node based on
the preference ratio (profit / distance from the start
node) in descending order
4. Chose the first D nodes. (D is a fixed parameter
that relates to the number of nodes, here we can
assume it is fixed to 10)
5. Create a list of visited nodes and a list of unvisited
ones.
6. Set all customers as unvisited nodes
7. Chose a random node N from the preference list.
8. Assign N to the vehicles one by one according to
the preference list.
9. Update both visited and unvisited lists
10. End For
11. Repeat
12. For each vehicle Do
13. Compute the travel time of the vehicle.
14. Create a list of nodes for the last customer node on
the vehicle based on the preference ratio ( profit
per distance from the start node) in descending or-
der
15. Chose the first D nodes. (D is a fixed parameter
that relates to the number of nodes, here we can
assume it is fixed to 10)
16. Chose a random node N from the preference list.
17. If by adding N to the vehicle the travel time + time
to back to depot is less than the maximum travel
time limit
18. Assign N to the vehicle
19. Update both visited and unvisited lists
20. End For
21. Until The stop condition is reached
a given feasible tour. As a result, a new arrangement
of the given feasible tour with minimum travel time is
reached.
4.3.2 Second Step: Profit Maximization
Such an operator will swap or move a node between
tours with the following operators. It aims to find the
minimum travel time for the current solution:
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
340

1. Remove a visited node from a tour and insert a not
visited node with a higher ratio of attractiveness.
2. Insert a not visited node in a tour
Both operators are combined with the first step in
an iterative manner so that each inserted node will find
its best position. As like as the first step once an oper-
ator finds a better solution, the new founded solution
will be replaced with the initial one and the algorithm
continus to find an other better solution until a stop-
ping condition.
Local search is applied in an iterative manner.
Once it finds a feasible solution with less travel time,
it will repeat the searching process from the achieved
solution. The proposed intensification strategy will
assure feasibility and improvement of the quality
of the obtained solution. Using the best solution
achieved by the deep searching strategy, an enumera-
tive procedure will try to insert nodes from unvisited
nodes to the solution.
Algorithm 3 describes the process of maximizing
the profit by inserting an unvisited node in a tour.
Note that in case that the local search cannot improve
the initial solution after a number of iterations, the
jumping strategy is applied by removing the sixty per-
cent of the visited nodes and creating a new diversi-
fied solution.
Algorithm 3: Maximizing the profit.
1. Define S as a feasible solution obtained when us-
ing the deep searching strategy
2. Define V as a list of visited nodes and N(V ) de-
notes the cardinality of V
3. Repeat for each node {x} belonging to the not
visited nodes:
4. Create S by Adding {x} in a position of S
5. Set N(V ) U {x} → d(S), where d(S) denotes the
travel time of S
6. If S is feasible, i.e., d(S) ≤ T
max
Do
7. Call the deep searching strategy with S
8. Add {x} to the visited list and save S
9. End Repeat
4.4 Jumping Strategy
The jumping strategy tries to diversify the search pro-
cess by building new solutions. It guarantees to con-
verge to an eventual global optima with sufficient it-
erations. Let S be a feasible solution with an objective
value V (S)). The jumping process randomly remove
α(a given percentage) customers from the current so-
lution, providing a partial solution (namely S
0
with the
rest of the customers. Such a process will perturb the
solution and will move the search space to unvisited
areas. The process of destroying a solution by remov-
ing the customers and building a new solution will
extend the exploration of the search space. Hence,
the strategy can improve the quality of the solution
although there is no guarantee to always improve it.
The stopping criteria for all used procedures are
based upon the number of iterations that comes from
several test experiments. Though to avoid not nec-
essary calculations and save the processor memory,
stopping criterion can be changed with respect to
each step. Limited computational results showed that
for instances extracted from (Chao et al., 1996), the
method is able to match all bounds by using a reason-
able global average runtime.
4.5 Self Learning Strategy
The main part of the approach is the global organiza-
tion of the mentioned methods and the update proce-
dure. As we discussed though the published articles
in the literature, PSO has found interesting (upper)
bounds (especially for large-scale instances). At each
iteration of PSO, it choses its next step by using in-
formation from the best neighbor, the best local and
the global best local. Herein, as already mentioned
(above), the proposed approach mimics such a strat-
egy by considering the best neighbor, the best local
optima and the best achieved solutions as a pattern to
create new solutions. Self Learning Strategy (SLS)
uses an operator called Imitator, so that at each itera-
tion, information taken from the past affects the cur-
rent decision. Such an operator is explained in what
follows.
4.5.1 Imitator Operator
Such an operator combines two solutions and creates
a new solution. It imites parts of two initial solu-
tions by considering two feasible solutions S
1
and S
2
,
which each of them has a maximum m (number of
available vehicles) feasible tours and a list of unvis-
ited customers. Imitator will create a feasible solu-
tion S by imitating a part of S
2
with S
1
. Algorithm 4
illustrate the main steps used by the imitator operator.
Imitator creates a new solution by storing in-
formation extracted from an other solution. Such
an operator is used to produce new solutions (short
diversification) and also to create a new solution
based on global best and local best solutions at each
iteration.
Self Learning Strategy for the Team Orienteering Problem (SLS-TOP)
341
Algorithm 4: Imitator.
1. Input: feasible solutions S
1
and S
2
2. Output: a feasible solution S
3. For all the vehicles:
4. Take tour T
1
from S
1
and tour T
2
from S
2
5. create a list of nodes L
1
by first half of the visited
nodes in T
1
6. create a list of nodes L
2
by second half of the vis-
ited nodes in T
2
7. Creat T (which can be not feasible) → L
1
U L
2
8. remove repeated nodes in T
9. Repeat while T is not feasible
10. remove a node with least profit
11. End Repeat
12. Create a new solution S by replacing T in T
1
and
save the rest of the solution S
1
13. S → feasible(S)
14. End For
5 EXPERIMENTAL PART
The proposed method was coded in C++ on OS ver-
sion 10.14.5 with 2.3 GHz Intel Core i5 processor.
The behavior of the proposed approach (noted SLS)
was evaluated on seven sets of instances taken from
(Chao et al., 1996). These sets contain 387 instances
varying from small to large-scale instances. In fact,
these sets are characterized by different maximum
travel times and for each set the number of vehicles
varies from 2 to 4. Coordination and the amount of
profit of the customers are identical for each set. As
noted in (El-Hajj et al., 2016), families with more
available vehicles and higher values of travel time are
more difficult to solve. This is the case for the fam-
ilies 4, 5 and 7. Contrarily, families 1, 2 and 3 are
solved with no difficulties (even with exact methods
(Fischetti et al., 1998)(Dang et al., 2013a)), due to
their small number of customers. The other factor that
can effect the difficulties to solve is the distribution of
the customers and/or their geometric structure. This
is the case for the families 5 and 6. where customers
with larger profits have more distance to the depots.
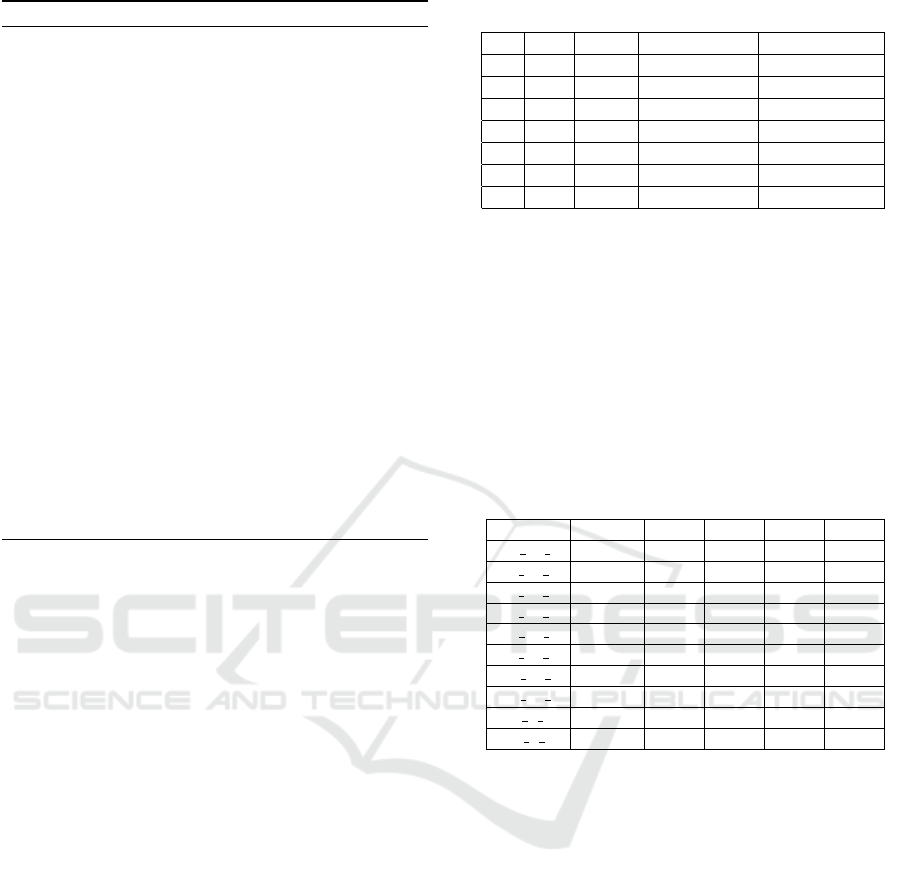
Table 1 provides the characteristics of each sets in
the (Chao et al., 1996) benchmark dataset.
A good parameter settings can be achieved
through experimental tests. In local search phase,
some parameters (number of iterations, number of so-
Table 1: Characteristics of instances (Chao et al., 1996).
set n m T
max
Nb of instances
1 32 2, 3,4 2,5 to 21,2 54
2 21 2, 3,4 7,5 to 11,2 33
3 33 2, 3,4 7,5 to 27,5 60
4 100 2, 3,4 25,0 to 60,0 60
5 66 2, 3,4 2,5 to 32,5 78
6 64 2, 3,4 7,5 to 20,0 42
7 102 2, 3,4 10,0 to 100,0 60
lutions/population size) must be such strong to find
the local optima and in coefficient of the diversifica-
tion must be high to visit the search space. In gen-
eral, the coefficient of the diversify must not exceed
30% of the total number of customers. The achieved
bounds are also compared to those available in the lit-
erature (extracted from (Bouly et al., 2010)). Herein,
due to the limited space, we only presented sample of
instances in Table2 compared with those published in
the literature.
Table 2: Comparative results.
Instance ACO VNS MA SLS Best
P1 04 r 210 210 210 210 210
P1 02 d 30 30 30 30 30
P1 03 q 230 230 230 230 230
P2 03 k 200 200 200 200 200
P2 04 e 70 70 70 70 70
P2 04 k 180 180 180 180 180
P3 03 i 330 330 330 330 330
P3 04 t 670 670 670 670 670
P5 2 Z 1672.5 1670 1680 1680 1680
P5 4 z 1585.5 1620 1620 1620 1620
ACO, VNS and MA in column header of Table
2 are refers to the solution methods provided by (Ke
et al., 2008), (Archetti et al., 2007) and (Bouly et al.,
2010) respectively. From Table2 , one can observe
that for all considered instances, the proposed method
is able to match all better bounds extracted from the
literature. In fact, for these instances, the proposed
method matches all better bounds reached by MA al-
gorithm, it improves one bound when compared to
those provided by VNS approach and, in two cases
it dominates those achieved by ACO method.
6 CONCLUSIONS
The team orienteering problem can be viewed as a
combination of both vehicle routing and knapsack
problems. The goal of the problem is to maximize the
total profit related to the visited customers. Herein, a
self learning strategy was proposed for approximately
solving the problem. Such an approach is based upon
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
342

a population-based approach, where deep searching
and jumping strategies cooperate. The proposed pre-
liminary computational results showed that the pro-
posed approach remains competitive by matching all
the better bounds extracted from several papers of the
literature. Finally, as a future work we first plan to
hybridize the specific jumping strategy with variable
fixation strategy: in this case, some favorite costumers
can be automatically fixed to the optimum and the re-
duced problem can be solved by calling the method
presented in this study. Second and last, we plan to
inject a black-box solver in order to build a matheuris-
tic for tackling some reduced subproblems that is able
to achieve better bounds, especially for large-scale in
stances.
REFERENCES
Archetti, C., Hertz, A., and Speranza, M. G. (2007). Meta-
heuristics for the team orienteering problem. Journal
of Heuristics, 13(1):49–76.
Archetti, C., Speranza, M. G., and Vigo, D. (2014). Chapter
10: Vehicle routing problems with profits. In Vehicle
Routing: Problems, Methods, and Applications, Sec-
ond Edition, pages 273–297. SIAM.
Bederina, H. and Hifi, M. (2017). A hybrid multi-objective
evolutionary algorithm for the team orienteering prob-
lem. In 2017 4th International Conference on Con-
trol, Decision and Information Technologies (CoDIT),
pages 0898–0903. IEEE.
Bianchessi, N., Mansini, R., and Speranza, M. G. (2018).
A branch-and-cut algorithm for the team orienteering
problem. International Transactions in Operational
Research, 25(2):627–635.
Bouly, H., Dang, D.-C., and Moukrim, A. (2010). A
memetic algorithm for the team orienteering problem.
4or, 8(1):49–70.
Boussier, S., Feillet, D., and Gendreau, M. (2007). An ex-
act algorithm for team orienteering problems. 4or,
5(3):211–230.
Chao, I.-M., Golden, B. L., and Wasil, E. A. (1996). The
team orienteering problem. European journal of op-
erational research, 88(3):464–474.
Cheong, C. Y., Tan, K. C., Liu, D., and Xu, J.-X. (2006).
A multiobjective evolutionary algorithm for solving
vehicle routing problem with stochastic demand. In
2006 IEEE International Conference on Evolutionary
Computation, pages 1370–1377. IEEE.
Coello, C. A. C. (2010). List of references on evolutionary
multiobjective optimization. URL¡ http://www. lania.
mx/˜ ccoello/EMOO/EMOObib. html.
Dang, D.-C., El-Hajj, R., and Moukrim, A. (2013a). A
branch-and-cut algorithm for solving the team orien-
teering problem. In International Conference on AI
and OR Techniques in Constriant Programming for
Combinatorial Optimization Problems, pages 332–
339. Springer.
Dang, D.-C., Guibadj, R. N., and Moukrim, A. (2011). A
pso-based memetic algorithm for the team orienteer-
ing problem. In European Conference on the Appli-
cations of Evolutionary Computation, pages 471–480.
Springer.
Dang, D.-C., Guibadj, R. N., and Moukrim, A. (2013b).
An effective pso-inspired algorithm for the team ori-
enteering problem. European Journal of Operational
Research, 229(2):332–344.
Ehrgott, M. and Gandibleux, X. (2000). A survey and an-
notated bibliography of multiobjective combinatorial
optimization. OR-Spektrum, 22(4):425–460.
El-Hajj, R., Dang, D.-C., and Moukrim, A. (2016). Solv-
ing the team orienteering problem with cutting planes.
Computers & Operations Research, 74:21–30.
Fischetti, M., Gonzalez, J. J. S., and Toth, P. (1998). Solv-
ing the orienteering problem through branch-and-cut.
INFORMS Journal on Computing, 10(2):133–148.
Golden, B. L., Levy, L., and Vohra, R. (1987). The ori-
enteering problem. Naval Research Logistics (NRL),
34(3):307–318.
Gunawan, A., Lau, H. C., and Vansteenwegen, P. (2016).
Orienteering problem: A survey of recent variants, so-
lution approaches and applications. European Journal
of Operational Research, 255(2):315–332.
Ke, L., Archetti, C., and Feng, Z. (2008). Ants can solve the
team orienteering problem. Computers & Industrial
Engineering, 54(3):648–665.
Ke, L., Zhai, L., Li, J., and Chan, F. T. (2016). Pareto mimic
algorithm: An approach to the team orienteering prob-
lem. Omega, 61:155–166.
Keshtkaran, M., Ziarati, K., Bettinelli, A., and Vigo, D.
(2016). Enhanced exact solution methods for the team
orienteering problem. International Journal of Pro-
duction Research, 54(2):591–601.
Khemakhem, M., Semet, F., and Chabchoub, H. (2007).
Heuristique bas
´
ee sur la m
´
emoire adaptative pour le
probl
`
eme de tourn
´
ees de v
´
ehicules s
´
electives. In SM-
CIEEE, r
´
edacteur, Proceeding de la conf
´
erence en Lo-
gistique et Transport LT, volume 7.
Lawler, E. L., Lenstra, J. K., and Kan, A. R. (1985). Db
shmoys. the traveling salesman problem. A Guided
Tour of Combinatorial Optimization,” Wiley.
Pessoa, A., Sadykov, R., Uchoa, E., and Vanderbeck, F.
(2019). A generic exact solver for vehicle routing and
related problems. In International Conference on In-
teger Programming and Combinatorial Optimization,
pages 354–369. Springer.
Tang, H. and Miller-Hooks, E. (2005). A tabu search heuris-
tic for the team orienteering problem. Computers &
Operations Research, 32(6):1379–1407.
Vansteenwegen, P., Souffriau, W., and Van Oudheusden, D.
(2011). The orienteering problem: A survey. Euro-
pean Journal of Operational Research, 209(1):1–10.
Self Learning Strategy for the Team Orienteering Problem (SLS-TOP)
343
