
Design of Scenario-based Application-Optimized Data Replication
Strategies through Genetic Programming
Syed Mohtashim Abbas Bokhari and Oliver Theel
Department of Computer Science, University of Oldenburg, Germany
Keywords: Distributed Systems, Fault Tolerance, Data Replication, Quorum Protocols, Operation Availability, Operation
Cost, Voting Structures, Optimization, Machine Leaning, Evolutionary Strategies, Genetic Programming.
Abstract: A distributed system is a paradigm which is indispensable to the current world due to countless requests with
every passing second. Therefore, in distributed computing, high availability is very important. In a dynamic
environment due to the scalability and complexity of the resources and components, systems are fault-prone
because millions of computing devices are connected to each other via communication links. Distributed
systems allow many users to access shared computing resources which makes faults inevitable. Replication
plays its role in masking failures in order to achieve a fault-tolerant distributed environment. Data replication
is an appropriate means to provide highly available data access operations at relatively low operation costs.
Although there are several contemporary data replication strategies being used, the question still stands which
strategy is the best for a given scenario or application class assuming a certain workload, its distribution across
a network, availability of the individual replicas, and cost of the access operations. In this regard, research
focuses on analysis, simulation, and machine learning approaches to automatically identify and design such
replication strategies that are optimized for a given application scenario based on predefined constraints and
properties exploiting a so-called voting structure.
1 INTRODUCTION
To provide highly available data access operations is
a widely discussed prevalent problem in computer
science. Relying on a single replica significantly
confines the availability of the data. Therefore, the
increase in the number of replicas to store the data
objects is inevitable, which, when smartly applied,
increases the availability of the data object and makes
it more fault-tolerant. Because now, it can be
accessed by approaching other replicas, too. But then
the challenge comes up of managing those replicas
and maintain consistency so that replicas always yield
correct values. The goal of the operations is also to
behave in a replicated system the same as they would
do in a non-replicated system. This is known as one-
copy serializability (1SR) (Bernstein, P. et al., 1987).
As for this, these replicas are managed by protocols
known as data replication strategies (DRSs). These
strategies impose a threshold of a minimal number of
replicas known as read quorum (rq) and write quorum
(wq) to be accessed to perform the preferred access
operations. These access operations are either a read
or a write operation. The decisions to choose suitable
DRSs are trade-offs between choosing various quality
metrics such as load, capacity, availability (Naor, M.,
and Wool, A., 1998), scalability, and cost (Jimenez-
Peris, R. et al., 2001). The availabilities of read and
write operations are optimally point symmetrical to
each other (Theel, O., Pagnia, H., 1998). For instance,
an increased availability for a write operation would
compromise the availability of a read operation to a
certain extent and vice versa. It is more like the same
case with the cost of the read and write operations,
too. The questions arise as what are those
compromises, to what extent particular values can be
compromised and at the expense of what? These
compromises could be highly application-specific
and comprised of many scenarios which will be
discussed further in Section 2. This research intends
to provide application-optimized DRSs to fulfil such
specified scenarios.
The paper is written as follows. Section 2 specifies
and discusses the problem statement. Section 3
discusses the current state-of-the-art DRSs and other
contemporary approaches to address the problem and
their limitations. Section 4 defines the fault model,
describes the adopted methodology to approach the
120
Bokhari, S. and Theel, O.
Design of Scenario-based Application-optimized Data Replication Strategies through Genetic Programming.
DOI: 10.5220/0008955301200129
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 120-129
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
problem, and argues about the reason for opting this
approach over others. Section 5 states the
implementation aspects of the research. Section 6
presents the outcome, results, and their comparisons,
followed by a conclusion.
2 PROBLEM STATEMENT
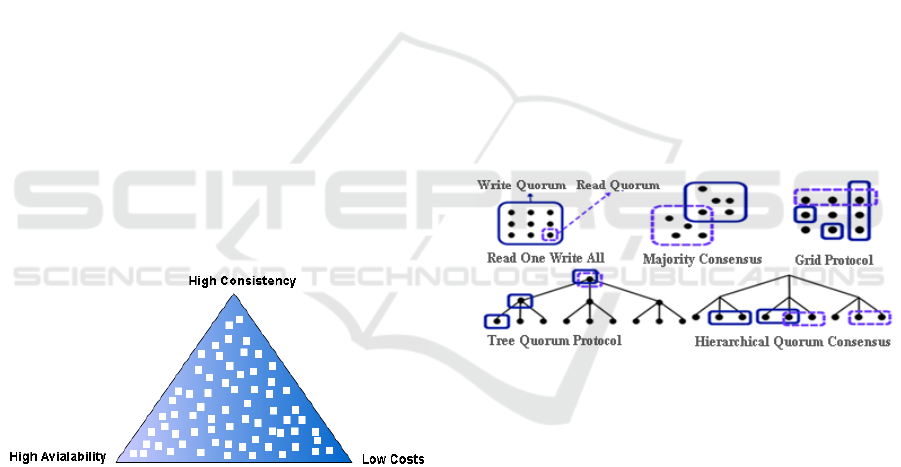
The problem is illustrated by a triangle given in
Figure 1 where the consistency part is static because
1SR is maintained all the time. This leaves us room
to fully play around the availability and cost of the
access operations (provided a threshold of the total
number of replicas and the probability of individual
replicas). It can be seen that there are many scenarios
between availability and cost of the access operations
in a distributed paradigm. There exist many
contemporary strategies to manage those distributed
replicas, but the question still stands, which strategy
is best for a given scenario or application class.
Considering the fact that not every strategy fulfils
each scenario, leaves many scenarios unaddressed,
for which no optimal strategy exists. Hence, there is
no best solution (in terms of a global optima) but
solutions that serve a particular purpose (i.e., local
optima). Our research focuses on the automatic
identification and design of such an optimized data
replication strategy.
Figure 1: Data replication scenarios.
3 RELATED WORK
DRSs in general are categorized into two major
classes: unstructured and structured DRSs.
Unstructured DRSs, for instance, the Majority
Consensus Strategy (Thomas, R, H., 1979) use
combinatorics and minimum quorum cardinalities to
specify a quorum system. The Majority Consensus
Strategy requires n/2 replicas for the read and
(n+1)/2 for the write quorum to execute any
operation in a system comprising n replicas. This
threshold-based quorum system allows all the
replicas an equal opportunity to be in a read or write
quorum. However, it succumbs to high operational
cost and scalability issues because of linearly
increasing quorum cardinalities. This is not the case
in structured replication strategies where structural
properties and patters are used to specify the quorum
system. For instance, the Grid Protocol (Cheung, S. et
al., 1992) imposes a logical rectangular i * j grid
structure where i indicates column and j rows for a
system comprised of i * j = n replicas. A read quorum
consists of replicas from each column while a write
quorum constitutes all the replicas from a column
along with one replica from each column to satisfy
the quorum system intersection property. As shown
in Figure 2, there exist many other contemporary
strategies such as Read-One-Write-All (Bernstein, P.,
and Goodman, N., 1984), the Tree Quorum Protocol
(Agrawal, D., and Abbadi, A., 1990), the Weighted
Voting Strategy (Gifford, D., 1979), the Hierarchical
Quorum Consensus (Kumar, A., 1991), the
Triangular Lattice Protocol (Wu, C., and Belford, G.,
1992), etc. But the current state-of-the-art has not
much focused on a hybrid approach to explore new
strategies.
Figure 2: Contemporary data replication strategies (Lee, Y.-
J. et al., 2009).
There have been only a few limited efforts made
towards hybrid strategies because of its cumbersome
nature. So, there are some attempts, i.e., (Theel, O.,
1993), (Theel, O., 1994), (Pagnia, H., and Theel, O.,
1998), and (Bokhari, S, M, A., and Theel, O., 2020)
on hybrid approaches which manually design DRSs
but lack automation. Moreover, there exist only a few
papers, i.e., (Arai, M. et al., 2004), (Choi, S., and
Youn, H., 2012), etc. on hybrid approaches which
primarily attempt to combine Tree Quorum Protocols
with Grid Protocols but they do not impose any
unified structure on the nodes which greatly limits the
operability of the approach. Because of the diverse
nature of topologies (as shown in Figure 2), there is
less room for a hybrid approach to work effectively
as it cannot incorporate the varied strategies freely.
Design of Scenario-based Application-optimized Data Replication Strategies through Genetic Programming
121
As a consequence, many scenarios could be left
unaddressed. Whereas, to address this issue, if a
hybrid approach is applied to such a diverse nature of
topologies, the problem easily goes out of hand.
Section 4 addresses this limitation and provides a
solution to that problem.
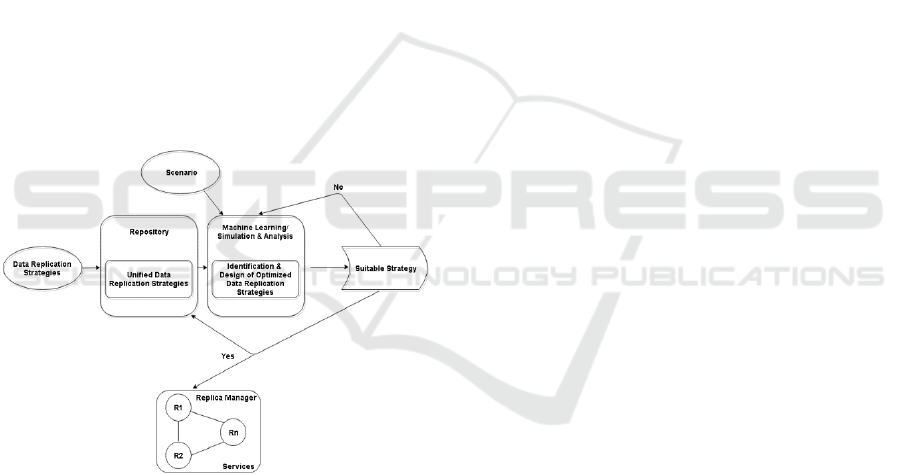
4 METHODOLOGY
Figure 3 shows the proposed methodology in a
simplified manner. It starts from replication strategies
being injected into a database repository and a
scenario. Both, the nature of the repository and the
scenario will be explained in detail in this section.
The analysis and simulations (shown later in this
paper) are performed on the repository until the
desired solution is met which then is inserted back to
the repository for future use. Here, the question also
arises of selecting the appropriate machine learning
and simulation techniques for the identification and
for the design of optimized data replication strategies.
Let us dissect all these components one by one in the
following.
Figure 3: Methodology.
4.1 Fault Model
Prior to discussing the components, we state the fault
model and other assumptions first. The access
operations are either read or write and are performed
only when the proper quorum is acquired. The
replicas are supposed to manifest a fail-silent
behaviour. All failures are assumed to be independent
of each other. The network is supposed to be fully
connected without communication failures. Only
nodes (machines) with replicas can fail and the
probability that a node has failed at any particular
point in time is (1-p). p gives the probability that a
node is available at an arbitrary point in time. The
strategies are supposed to be version-based to avoid
additional time synchronization issues, i.e., a replica
does not only consist of some “payload” data but also
a version number. A replica with a highest version
number has the up-to-date payload.
4.2 Voting Structures
To address the mentioned topological and diversity
issues between DRSs, a unified representation of
these strategies by a concept like General Structured
Voting (Theel, O., 1993) is required for the
simulation and machine learning approaches to be
applied over it. Expert-based manual designs of
optimized DRSs using the concept of voting
structures have been presented in (Theel, O., 1994),
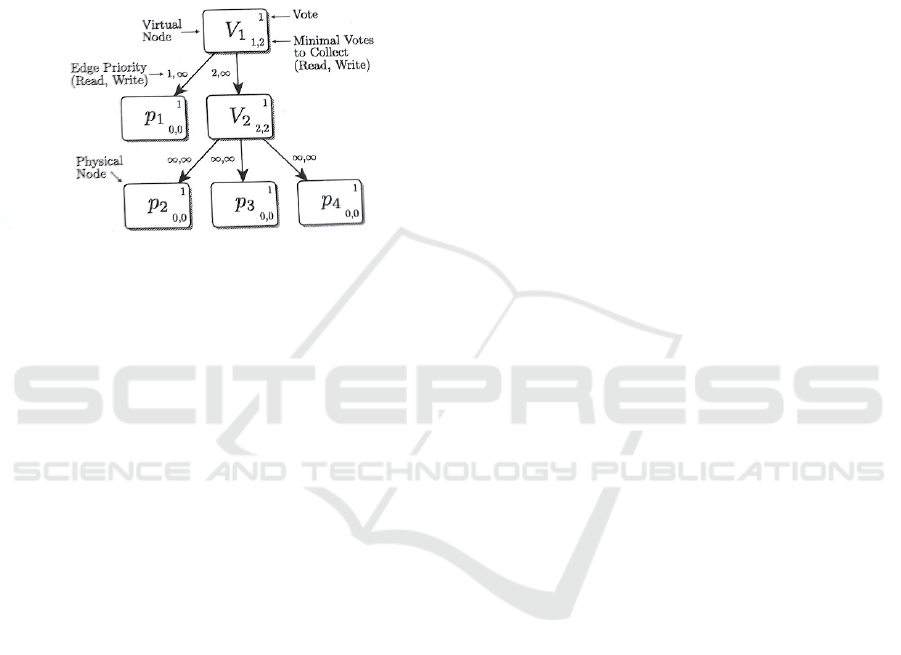
and (Pagnia, H., and Theel, O., 1998). Figure 4
represents a quorum system by a directed acyclic
graph (DAG) named a voting structure. A voting
structure is traversed recursively by an algorithm to
derive the quorums for respective access operations
at run time independent of the varied topologies of the
strategies. The nodes of a voting structure are either
physical nodes representing actual replicas or virtual
nodes that constitute the groupings of physical and
virtual nodes. The virtual nodes are labelled Vi,
where i = 1, 2, … while the physical nodes are
labelled p
j
where 1 ≤ j ≤ n and n represent the total
number of replicas of a system. Irrespective of being
a physical or virtual node, every node is endowed
with votes comprised of a natural number (top right
corner) which could also be comprehended as the
weightage of that node. Furthermore, each node is
equipped with a pair of minimal quorums (called
“minimal votes” in the figure) to collect from its child
nodes to build the read and write quorums. The
minimal quorums for each node to gather per
operation has to be less than or equal to the sum of the
votes of its children. Some replication strategies, i.e.
the Tree Quorum Protocol imposes a partial order on
the quorums by which to use quorums for operation
execution. The specification of such an ordering
allows certain quorums to be used prior to others. In
such cases, the directed edges of voting structures can
be marked with operation-specific priorities imposing
such orderings. An edge priority of 1 annotates the
highest while the symbol ∞ represents the lowest
priority. This voting structure is traversed by the
recursive algorithm to derive respective quorums. It
starts from the root node and queries as many of its
child nodes as specified in the minimal quorums to
orchestrate the quorums of physical replicas for the
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
122
respective access operations. On each level, if the
voting structure has a total number of votes V, then
the quorums for intersection abide by the following
rules in general:
1. rq + wq > V (to avoid read-write conflicts) (1)
2. wq > V/2 (to avoid write-write conflicts) (2)
Where rq (wq) is a number representing the minimal
read (write) quorum.
Figure 4: Example of a voting structure (Storm, C., 2012).
For instance, the voting structure shown in Figure 4
produces the following read (RQ) and write quorum
sets (WQ):
RQ = {{p1}, {p2, p3}, {p2, p4}, {p3, p4}}
WQ = {{p1, p2, p3}, {p1, p2, p4}, {p1, p3, p4}}
4.3 Scenario Parameters
A scenario for DRSs consists of constraints which
determine the fitness of a strategy holistically to judge
the goodness of a solution. These constraints may
vary among different applications depending upon
their nature, requirements, and resources.
4.3.1
Consistency of Operations
There exists a variety of data consistency models for
DRSs ranging from strict data consistency to
relatively weaker notions. As already stated,
consistency model opted for our approach is static
and strictly meets the 1SR property. The 1SR
property is maintained in a DRS when 1) every read
quorum intersects every write quorum, 2) all write
quorums intersect with each other, 3) replicas can be
locked exclusively for write operations and locked
shared for read operations.
4.3.2
Number of Replicas
There is a threshold imposed on the total number of
replicas n that for any strategy, n cannot exceed the
specified threshold value ε. This is, because it
certainly costs to create new nodes to host replicas.
N, ε ∈ ⁺
∧ n ≤ ε (3)
4.3.3 Availability of Access Operations
The probability that the data access operations are
available for a DRS depends on the characteristics of
the strategy, the probability of individual replicas p
and number of replicas n. It is defined by Ar(p, n) and
Aw(p, n) respectively, where Ar(p, n), Aw(p, n) ∈
[0,1]. For some DRSs, there exist closed formulas to
calculate the availability as well as the costs.
However, generally, the equations given below are
used to analyse the data access operations’
availability of a DRS. All the RQs and WQs are
derived from a DRS to calculate Ar(p, n) and Aw(p,
n) for given p and n values. Equations 4 and 5
calculate the read and write operation availabilities
respectively. For this, they rely on a so-called set of
all possible read (write) quorums RQS (WQS). In the
scope of the example of Figure 4, RQS equals RQ ∪
{{p1,p2,p3,p4}} (WQS equals WQ ∪
{{p1,p2,p3,p4}}). The equations take the sum of the
probability of all elements of RQS or WQS being
available for a given probability p of individual
replicas.
Ar(p, n) = Σ
∀q∈ RQS
p
|q|
(1− p)
n−|q|
(4)
Aw(p, n) = Σ
∀q∈ WQS
p
|q|
(1− p)
n−|q|
(5)
These availabilities are probabilities and constraints
restrict them to be within the specified thresholds α,
β.
Ar, Aw, α, β ∈ [0, 1]
∧ Ar ≥ α
∧ Aw ≥ β (6)
4.3.4 Cost of Access Operations
The minimal average costs for the data access
operations are represented by Cr(p, n) and Cw(p, n)
respectively. The read Cr(p, n) and write Cw(p, n)
costs reckon the average minimal number of replicas
out of the total number of replicas n, which are
mandatory to perform an operation for a given
Design of Scenario-based Application-optimized Data Replication Strategies through Genetic Programming
123

probability of individual replicas p. This cost is
calculated by taking the sum of the minimum number
of replicas minRQ (minWQ) obligatory to form a
read (write) quorum for each replica set in RQS
(WQS) with the probability of the replica set
appearing. Furthermore, the resulted sum has to be
divided by Ar(p, n) or Aw(p, n) depending upon the
particular access operation.
Cr(p, n) = Σ
∀q∈ RQS
p
|q|
(1− p)
n−|q|
*
minRQ(q)
(7)
Ar(p, n)
Cw(p,n) = Σ
∀q∈ WQS
p
|q|
(1− p)
n−|q|
*
minWQ(q)
(8)
Aw(p, n)
These costs are real positive numbers and constraints
restrict them to be within the specified thresholds γ, δ.
Cr, Cw, γ, δ ∈ ⁺
∧ Cr ≤ γ
∧ Cw ≤ δ
(9)
4.3.5 Fitness Weightage
We use a so-called fitness weightage (fw) that
suggests a scenario to be biased towards either cost or
availability (or even being neutral), to be able to
convert a multi-objective into a single objective
problem. This makes the optimization problem
somewhat easier to solve.
fw ∈ [0,1] (10)
4.3.6
Probability of Individual Replicas
There is a subtle difference between the availability
of access operations and the availability of individual
replicas p. p refers to the probability by which the
replicas are available which means the probability
that a replica has failed at any particular point in time
is (1-p) while the user performs the operations with
access operations’ probability. In a scenario, we
restrict p to be in the interval between pmin ≤ p ≤
pmax.
pmin, p, pmax ∈ [0,1]
∧ pmin ≤ p ≤ pmax (11)
4.4 Database Repository
Figure 5 shows the data replication strategies Grid
Protocol (left) and Triangular Lattice Protocol (right)
converted into a unified representation of a voting
structure each. These voting strategies are stored in a
scalable database repository in the form of JSON
documents and can be queried upon any desirable
criteria.
Figure 5: Voting structures as DAGs representing DRSs.
4.5 Genetic Programming
The research proposes genetic programming (GP)
(Koza, J, R., 1992) and (Banzhaf, W. et al., 1998) as
a subset of machine learning to automatically identify
or design application-optimized DRSs. The major
difference of GP with other genetic variants of
machine learning is the representation. GP is used to
evolve computer programs. It consists of an encoding
scheme, random crossover, mutation, a fitness
function, and multiple generations of evolution to
solve the specified task on its termination condition.
The encoding scheme consists of a genotype (coding
space) carrying an underlying set of traits and a
phenotype (solution space) which is the behavioural
expression of this genotype in a specific environment.
Hence, the question arises which encoding scheme
should be used since poor representations may lead to
poor results. The crossover (
Syswerda, G., 1992)
operator mixes up the genetic material of parents in
anticipation of forming a better off-spring. It splits up
the genome of two existing solutions at an arbitrary
point and swaps them to create the off-spring
solutions inheriting properties from both of the parent
solutions. The mutation operator changes the solution
randomly but slightly, i.e., by flipping one or more
bits from the previous offspring to generate a new
altered child solution. In the pursuit of a solution, the
questions of crossover and mutation types as well as
points are also thought-provoking to address.
Moreover, the population size also matters because a
very small size implies few possibilities of executing
the crossovers. Therefore, only a fraction of the
search space can be explored. Alternatively, a very
large size may slow down the genetic approach.
Although, it is highly problem-specific but very large
populations do not solve the problem faster than
moderate-sized populations. Figure 6 illustrates the
problem in the context of genetic programming where
we start from a scenario and an accordingly initial
population. The initial population is analyzed based
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
124
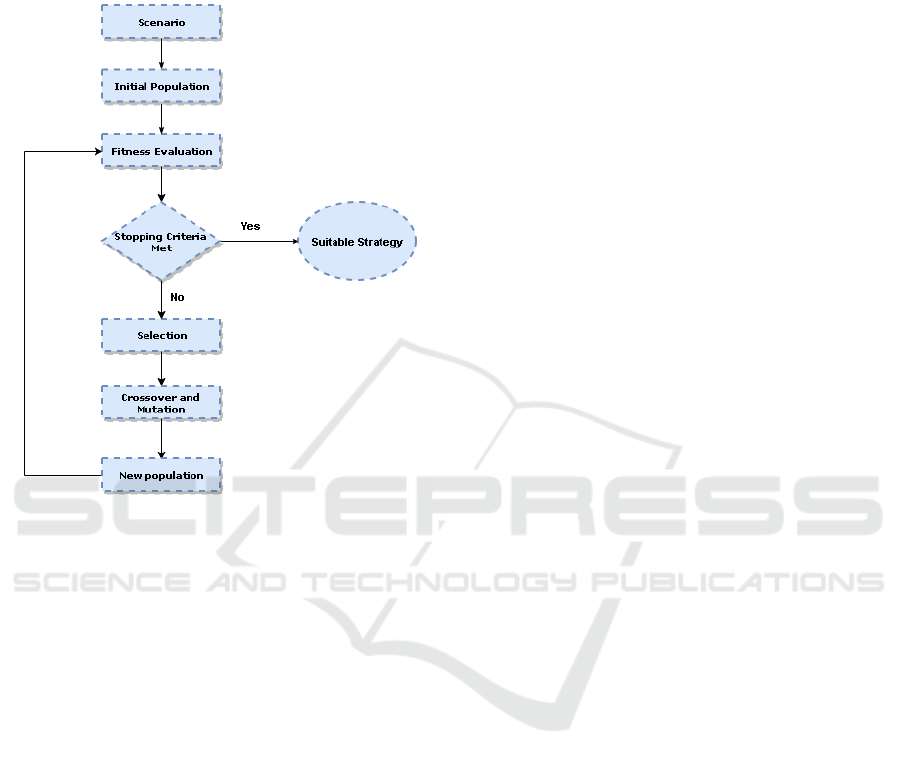
on its fitness to the scenario in order to choose better
strategies to perform crossover and sometimes also
mutation in anticipation of a constant evolutionary
trajectory until a solution is found.
Figure 6: Genetic programming.
5 IMPLEMENTATION
Having discussed the methodology, terminologies,
and semantics, let us examine the implementation
aspect comprising the parameters, functions, and the
algorithm itself in detail. Once the scenario is
specified to find a suitable DRS to fulfil it, the system
parameters are set for the algorithm to run.
5.1 Mu, μ, and Lambda, λ
Having provided the repository to select the
respective DRSs, the μ and λ values are also set as
system parameters for the algorithm to start. μ is the
restriction on the number of parents that are used to
form next generation and λ is the restraint on the
number of off-spring strategies generated using μ
number of parent DRSs.
5.2 Crossover
There are various ways by which the DRSs can be
combined and the resulting hybrid strategy will
certainly exhibit different properties than the parents.
The virtual nodes of two parent strategies are
swapped to form new offspring strategies.
Additionally, there are crossover points in every DRS
represented by a Boolean variable which allows the
crossover to be performed only on those points and in
such a way that it maintains the DRSs’ 1SR property
throughout the process. While performing crossovers,
the algorithm also restricts the number of replicas not
to grow beyond a certain threshold ε specified in the
scenario.
5.3 Mutation
The algorithm also performs mutation on the DRSs
with the probability specified in the system
parameters. This mutation modifies the votes of the
strategies allowing some replicas to be more
important in the weightage than other replicas. Once
the votes are changed, the quorum also needs to be
updated accordingly under the conditions (1) and (2)
to uphold the 1SR property. In addition, the algorithm
identifies the mutation points by a Boolean variable
to avoid the DRS to be inconsistent and thereby,
again, maintaining 1SR all the time.
5.4 Algorithm
Having specified a scenario and given it to the
program, scenarioFitness is calculated. μ and λ are
defined along with mutation probability. The list
μList contains parent DRSs, the list λList comprises
offspring DRSs, whereas the list initPopList consists
of an initial population of DRSs. The Boolean
variable isFit determines whether a strategy has
achieved the expected level of fitness. The genetic
program loops through all the passed on DRSs,
calculates the fitness of every individual strategy, and
selects the μ best strategies to the μList, in case, there
is no satisfactory solution found in the initial
population. This μList is then sent to the while loop
to select the DRSs randomly from it and perform the
crossovers and mutations to create λ offspring
strategies. The λList constitutes newly created
strategies which are evaluated again to check if they
satisfy the standard criteria. If the criteria are met,
then the relevant newly generated optimized strategy
is stored in the repository, the while loop terminates
Design of Scenario-based Application-optimized Data Replication Strategies through Genetic Programming
125
and so does the program. If not, it selects the μ best
DRSs to the μList from (μList + λList) for the next
generation. This process continues until a suitable
strategy is found.
A
lgorithm
1 Specify a scenario;
2 Calculate scenarioFitness;
3 Define μ and λ;
4 Initialize μList;
5 Initialize λList;
6 Boolean isFit = false;
7 Generate initial population of DRSs to the repository;
8 Retrieve, parse & store the generated DRSs to initPopList
9 geneticProgramming(initPopList) {
10 Loop through initPopList
11 Calculate fitness;
12 if (fitness ≥ scenarioFitness) {
13 isFit = true;
14 return;
}
15 END
16 Choose μ best DRSs to the μList;
17 Do
18 Empty λList;
19 Loop to λ
20 Select randomly DRS1 from μList;
21 Select randomly DRS2 from μList;
22 Perform crossover of DRS1, DRS2;
23 Generate off-spring DRSs;
24 Perform mutation on the off-spring;
25 Calculate fitness;
26 if (fitness ≥ scenarioFitness) {
27 isFit = true;
28 Store
off-spring DRS into
the repository;
}
29 Add off-spring DRSs to the λList;
30 END
31 Select
μ best DRSs to the μList from (μList
+ λList) for next generation;
32 While (!isFit);
}
6 EXPERIMENTS & RESULTS
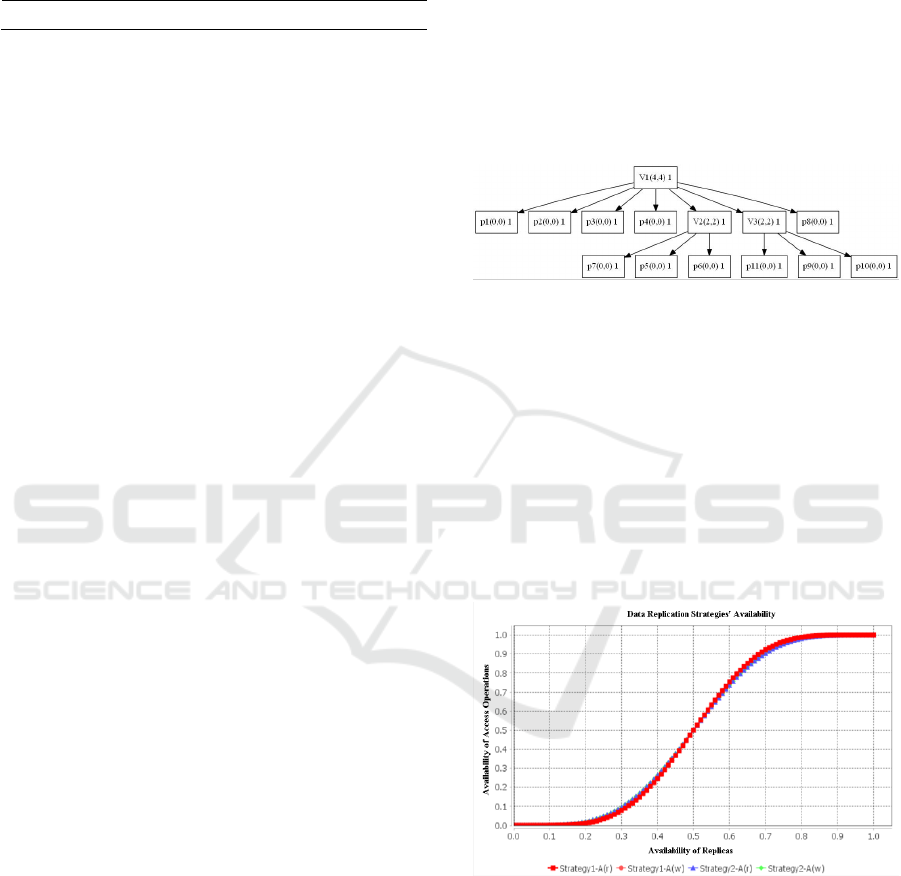
Figure 7 gives a relatively simple example of a hybrid
DRS generated by the algorithm which consists of 11
replicas. It can be seen that although the DRS is not
very complex and maintains a tree-like structure
rather than an acyclic one, yet it is so powerful and
optimized in terms of its availability and cost that it is
competing the Majority Consensus Strategy (MCS)
which is believed to be the best strategy in terms of
its availability of write access operations. When
compared, the hybrid DRS in terms of its availability
is so close to MCS. It is almost the same for higher
values of p, however, it is far better when it comes to
the cost comparison.
Figure 7: Hybrid strategy.
The availability and cost graphs on the discretized
values of p are shown in Figure 8 and Figure 9,
respectively, where Strategy 1 indicates the MCS
while the Strategy 2 represents a hybrid DRSs. Both
strategies consist of 11 replicas each. It can be seen
that in terms of operational availability the hybrid
strategy is converging on to the same values as MCS
for higher values of p. This is a quite good availability
but more importantly, it outclasses the MCS in terms
of its cost in all the cases. Hence, it covers a scenario
which could have been left unaddressed otherwise.
Figure 8: Availability graph of access operations.
In the best case, out of 11, it only takes four replicas
each to perform a read and a write operation while the
total cost for MCS is 12 for all the cases. This is a
good example of a relatively less complicated DRS
where we have not compromised the availability and
yet reduced the cost significantly by using the hybrid
approach via genetic programming.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
126
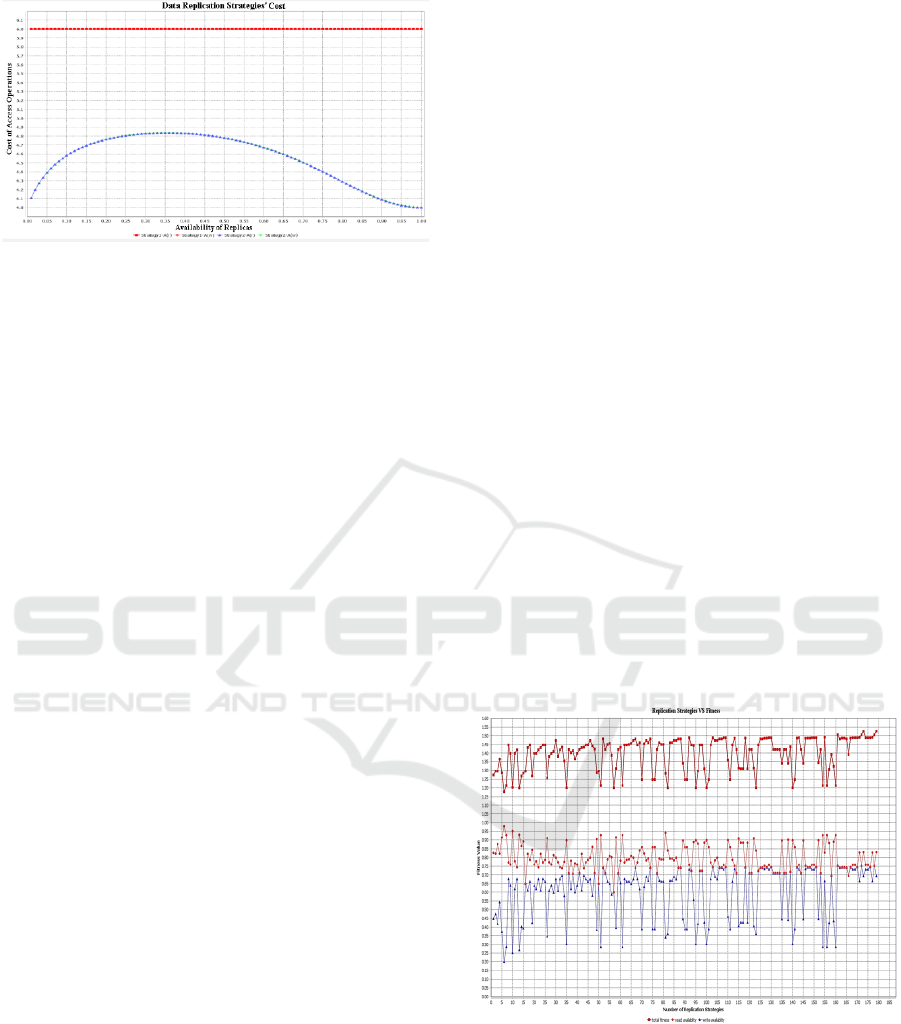
Figure 9: Cost graph of access operations.
6.1
A
Scenario
Let us specify a sample scenario and apply our
approach to find out whether a suitable replication
strategy can be found. The scenario consists of
desired read and write availabilities and their
respective costs, which must be achieved within the
threshold of maximum 16 replicas and some
availability p of individual replicas. However, cost is
not important in this case, therefore, full weightage is
given to availability.
6.2 Scenario
Parameters
The desired read availability and write availability
thresholds are 0.80 and 0.72, respectively, using a
node availability of 0.6 inside a 16 replicas limit. Cost
is specified being less than seven for each operation,
but the fitness weightage determines the availability
to be fully important.
p = 0.6
ε = 16
α = 0.80
β = 0.72
γ = 7.0
δ = 7.0
fw = 1.0
6.3 System
Parameters
Having defined the scenario, now the system
parameters are set to run the algorithm accordingly.
Here, the number of parent and offspring strategies
are set to six and 15, respectively. The initial
population is only used once, namely in the crossover
process in the very first generation. The crossovers
are performed all the time while the mutation is
performed with a probability of 0.2.
μ = 6
λ= 15
mutationProb = 0.2
6.4
Results
This section shows the graphical visualization of the
results generated by the algorithm on the provided
parameters. It analyzes the fitness of every individual,
every generation, and designs new strategies in the
course of fulfilling the specified criteria when it is not
found in the repository.
6.4.1
Fitness Analysis
Figure 10 depicts the fitness of every individual DRS
and the way it evolves. The x-axis represents the
number of DRSs and y- axis denotes the fitness value
of every individual strategy. The red line indicates
fitness of the DRSs while the pink and blue lines
represent the availabilities of read and write
operations, respectively. It can be noticed that it starts
with only a few strategies of low fitness which
implies that the repository does not have a
satisfactory solution to the problem. Then, the fitness
improves and begins to evolve gradually through
crossover and mutation operators of genetic
programming until the loop stops over the desired
termination condition.
Figure 10: Fitness graph.
6.4.2 Population Analysis
Figure 11 illustrates how the fitness of DRSs grows
by every generation. The graph shows the fitness of
the best DRSs among every generation. The x-axis
represents the number of generations while the y-axis
indicates the fitness value of the best replication
Design of Scenario-based Application-optimized Data Replication Strategies through Genetic Programming
127
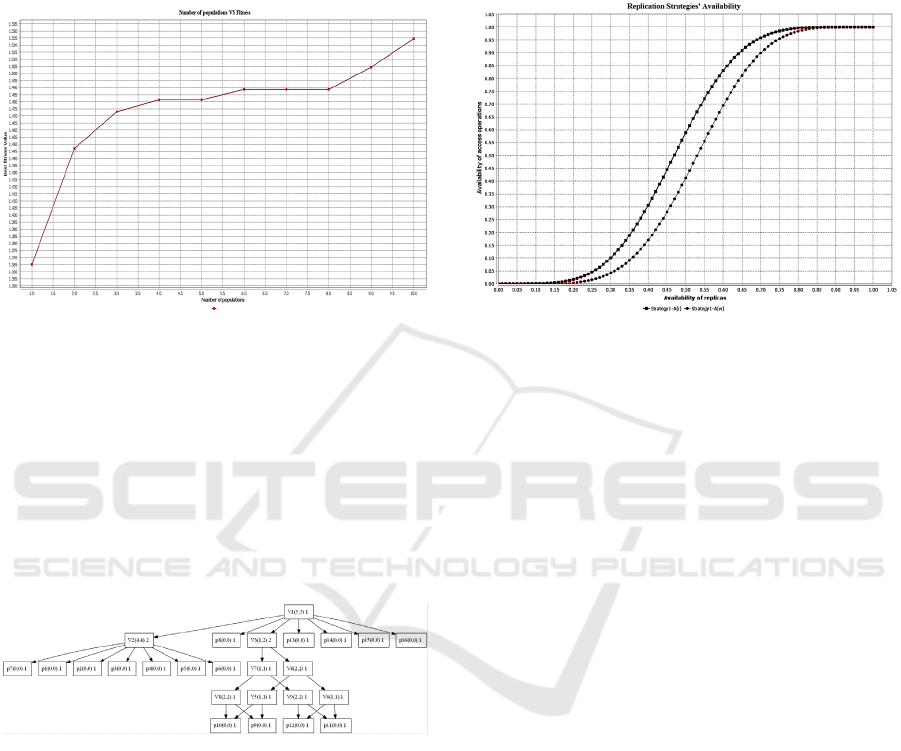
strategy of a respective generation. It took 10
generations for the system to find a suitable DRS that
satisfies the given scenario. It starts from a fitness of
1.365 and gradually but consistently continues to
climb up until the desired fitness of 1.525 is achieved.
Figure 11: Populations’ evolution.
6.4.3 Hybrid Data Replication Strategy
Figure 12 shows the identified suitable strategy
optimized for the mentioned scenario of Section 6.2.
This strategy is comprised of 16 replicas which meets
our threshold criterion ε. Moreover, the variable
votes, quorums, and the structure itself reflect its
hybrid nature that works together to serve the purpose
and provide an up-to-now unknown replication
strategy.
Figure 12: Optimized hybrid DRS for the given scenario.
6.4.4 Availability Analysis
Figure 13 shows the availability graph for the access
operations of the identified DRS on discretized values
of p. The newly designed DRS fulfils the specified
scenario of thresholds. The x-axis represents the node
availability while y-axis indicates the availability of
the access operations. The point symmetry of the
graph overtly displays an extremely high availability
for the access operations.
This availability is, again, very close to MCS
(particularly for higher p values) which is considered
the best in terms of the critical write operations’
availability, and at the same time, our hybrid
approach is reasonably economical in terms of cost.
In best cases, it takes only five replicas each for the
access operations out of 16 unlike MCS with a cost of
17 replicas in total for read and write, which is very
expensive.
Figure 13: Availability graph of read and write operations.
In this manner, the proposed machine learning
framework provides a strong opportunity to explore
and design new unknown DRSs for any specified
scenario and optimize them over several generations
of evolution to meet the specified scenario-specific
criteria.
7 CONCLUSIONS
This paper proposes an innovative, automated
mechanism for designing new hybrid optimized
DRSs for specified application-specific scenarios for
which no optimal strategy may exist. It designs the
DRSs without trying brute force all the possible
combinations since the search space is huge. The
novel approach does not only consider the availability
aspect, but also the cost aspect and successfully
models a scenario into a replication strategy. The
research is quite innovative in proposing a strong
machine learning mechanism towards data
replication and fault tolerance. Our proposed
approach has the potency to open whole new doors of
exploring unknown replication strategies which
otherwise potentially would not have been found.
Furthermore, it unprecedentedly uses voting
structures in the context of genetic programming to
generate new unknown optimized hybrid DRSs. More
complex crossover and mutation operators will be
taken into consideration as a part of future work to
further strengthen our approach.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
128

REFERENCES
Bernstein, P., Hadzilacos, V., and Goodman, N., 1987.
Concurrency Control and Recovery in Database
Systems, ISBN-13 978-0201107159, Addison Wesley,
p. 370.
Naor, M., and Wool, A., 1998. The Load, Capacity, and
Availability of Quorum Systems, SIAM Journal on
Computing, vol 27, no. 2, pp. 423-447.
Jimenez-Peris, R., Patino-Martınez, M., Alonso, G., and
Kemme, B., 2001. How to Select a Replication Protocol
According to Scalability, Availability, and
Communication Overhead, in Proceedings 20th IEEE
Symposium on Reliable Distributed Systems (SRDS).
Theel, O., Pagnia, H., 1998. Optimal Replica Control
Protocols Exhibit Symmetric Operation Availabilities,
in Proceedings of the 28th International Symposium on
Fault-Tolerant Computing (FTCS-28), pp. 252-261.
Thomas, R, H., 1979. A Majority Consensus Approach to
Concurrency Control for Multiple Copy Databases,
ACM Transactions on Database Systems 4.2, pp. 180–
207.
Cheung, S., Ammar, M., Ahamad, M., 1992. The Grid
Protocol: A High Performance Scheme for Maintaining
Replicated Data, IEEE Transactions on Knowledge and
Data Engineering, vol 4, issue 6.
Bernstein, P., and Goodman, N., 1984. An Algorithm for
Concurrency Control and Recovery in Replicated
Distributed Databases, ACM Transactions on Database
Systems (TODS), vol. 9, pp. 596–615.
Agrawal, D., and Abbadi, A., 1990. The Tree Quorum
Protocol: An Efficient Approach for Managing
Replicated Data, in Proceedings of the 16th
International Conference on Very Large Data Bases
(VLDB), pp. 243–254.
Gifford, D., 1979. Weighted Voting for Replicated Data,
Proceedings of the Seventh ACM Symposium on
Operating Systems Principles (SOSP), pp. 150-162.
Kumar, A., 1991. Hierarchical Quorum Consensus: A New
Algorithm for Managing Replicated Data, IEEE
Transactions on Computers, vol 40, issue 9, pp. 996–
1004.
Wu, C., and Belford, G., 1992. The Triangular Lattice
Protocol: A Highly Fault Tolerant and Highly Efficient
Protocol for Replicated Data, in Proceedings of the
11th Symposium on Reliable Distributed Systems
(SRDS), IEEE Computer Society Press.
Theel, O., 1993. Meeting the Application's Needs: A Design
Study of a Highly Customized Replication Scheme, in
Proceedings of the Pacific Rim International
Symposium on Fault Tolerant Computing, Melbourne,
Australia, pp. 111-117.
Theel, O., 1994. Rapid Replication Scheme Design using
General Structured Voting, in Proceedings of the 17th
Annual Computer Science Conference, Christchurch,
New Zealand , pp. 669-677.
Pagnia, H., and Theel, O., 1998. Priority-based Quorum
Protocols for Replicated Objects, in Proceedings of the
2nd International Conference on Parallel and
Distributed Computing and Networks (PDCN),
Brisbane, Australia, pp. 530-535.
Bokhari, S, M, A., and Theel, O., 2020. A Flexible Hybrid
Approach to Data Replication in Distributed Systems,
Computing Conference (SAI), London, UK (to be
published).
Arai, M., Suzuki,T., Ohara, M., Fukumoto, S., Iwasak, K.,
and Youn, H., 2004. Analysis of Read and Write
Availability for Generalized Hybrid Data Replication
Protocol, in Proceedings of the 10th IEEE Pacific Rim
International Symposium on Dependable Computing
(PRDC).
Choi, S., and Youn, H., 2012. Dynamic Hybrid Replication
Effectively Combining Tree and Grid Topology, The
Journal of Supercomputing, vol. 59, issue 3, pp. 1289-
1311.
Lee, Y.-J., Kim, H.-Y., Lee, C.-H., 2009. Cell
Approximation Method in Quorum Systems for
Minimizing Access Time, Cluster Computing, vol. 12,
pp. 387-398.
Theel, O., 1993. General Structured Voting: A Flexible
Framework for Modelling Cooperations, in
Proceedings of the 13th International Conference on
Distributed Computing Systems, pp. 227-236.
Storm, C., 2012. Specification and analytical evaluation of
heterogeneous dynamic quorum-based data replication
schemes, Springer Vieweg, ISBN 978-3-8348-2380-9,
pp. 1-350.
Koza, J, R., 1992. Genetic Programming: On the
Programming of Computers by Means of Natural
Selection, MIT Press, Cambridge.
Banzhaf, W., Francone, F, D., Keller, R, E., and Nordin, P.,
1998. Genetic Programming: An Introduction: on the
Automatic Evolution of Computer Programs and Its
Applications, Morgan Kaufmann Publishers Inc., San
Francisco, CA, USA.
Syswerda, G., 1992. Simulated Crossover in Genetic
Algorithms, In Foundations of Genetic Algorithms
(FOGA), pp. 239-255.
Design of Scenario-based Application-optimized Data Replication Strategies through Genetic Programming
129
