
Tactile Information Coding by Electro-tactile Feedback
Peter Schmid, Mona Bader and Thomas Maier
Institute for Engineering Design and Industrial Design, Department of Industrial Design Engineering,
University of Stuttgart, Pfaffenwaldring 9, Stuttgart, Germany
Keywords: Electro-tactile Feedback, Tactile Information Coding, Human Machine Interaction, Human Machine
Interface, Touch Interface, Tactile Perception.
Abstract: Touch user interfaces offer a wide range of interaction and manipulation possibilities. However, when
interacting with this technology, the feedback is usually only provided via the visual or audio-visual channel
of perception. Therefore, the study investigates how electro-tactile feedback can support the interaction with
touch interfaces. The aim is to use electro-tactile feedback to transmit information during an adjustment task
on a touch interface. For this purpose, five different types of electro-tactile feedback were investigated in a
user study with 15 test persons. During the execution of a main task, a simple adjustment task had to be done
in parallel on the electro-tactile touch interface. The electro-tactile feedback supports the execution of a main
task and a secondary task, but the study also shows that by concentrating on the electro-tactile feedback the
actuation time is extended.
1 INTRODUCTION
On touch-sensitive screens, information can not only
be displayed but also edited directly. It is possible to
execute as many complex functions on a small
interaction surface. When using this technology,
feedback to the user is usually audio-visual, the
feeling of a haptic feedback is completely lost.
According to Hoggan et al., the loss of haptic
feedback when operating a virtual input element leads
to a higher error rate and a lower input speed (Hoggan
et al., 2008). Studies by Harrison et al. and Koskinen
et al. show that haptic feedback makes interaction
with touchscreens more efficient and satisfying
(Harrison et al., 2009; Koskinen et al., 2008). Studies
from Schmid et al. or Winterholler show that in
situations with high audio-visual information content,
tactile information can be used to support people in
the performance of a primary and secondary task
(Schmid et al., 2019; Winterholler, 2019).
With regard to the design of haptic feedback, there
are already standards such as DIN EN ISO 9241-910
or VDI/VDE 3850-3, which focus on haptic feedback
for touch user interfaces as a supplement to auditory
or visual feedback (ISO, 2011; VDI/VDE, 2015).
According to DIN EN ISO 9241-112, information
coding can reduce the cognitive load on users by
supporting them in the performance of the task and by
providing necessary information in an unambiguous
way when interacting with a machine (ISO, 2017).
Therefore, the focus of this paper is on the electro-
tactile information coding of a virtual slider control
element concerning a medical use case. In an
operating room, there is a lot of noise and all feedback
from medical devices is visual or acoustic. This leads
to an overload of the human perception channel.
Consequently, concentrated work by doctors is not
possible. (Siegmann & Notbohm 2013)
However, there is still another perception channel,
which is completely unused in operating medical
instruments. To reduce the overload of the audio-
visual perception channel we can address the haptic
or tactile perception channel.
For the investigation of electro-tactile coding we
considered gas insufflation. Minimally invasive
surgery uses gas insufflation to fill the abdomen with
CO
2
in order to increase the operating field. For this
purpose, we derived five interface modules, which are
needed to control the gas insufflation. In addition to a
start/stop module, it is necessary to control the CO
2
pressure, the gas flow as well as the smoke extraction
and gas consumption. Currently these functions
provide only a visual or acoustic feedback in gas
insufflation. Hence, this project will evaluate the
tactile perception channel of humans with regard to
its supporting capacity in terms of tactile feedback
design. According to Schmid & Maier, different
Schmid, P., Bader, M. and Maier, T.
Tactile Information Coding by Electro-tactile Feedback.
DOI: 10.5220/0010066300370043
In Proceedings of the 4th International Conference on Computer-Human Interaction Research and Applications (CHIRA 2020), pages 37-43
ISBN: 978-989-758-480-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
37
tactile coding patterns on a touch user interface can
be used for information coding by intensity design of
the electro-tactile feedback during a sliding input
gesture. Different design options are available,
depending on a discrete or continuous feedback. The
identified tactile coding patterns divide into tactile
coding features and tactile coding ranges for both
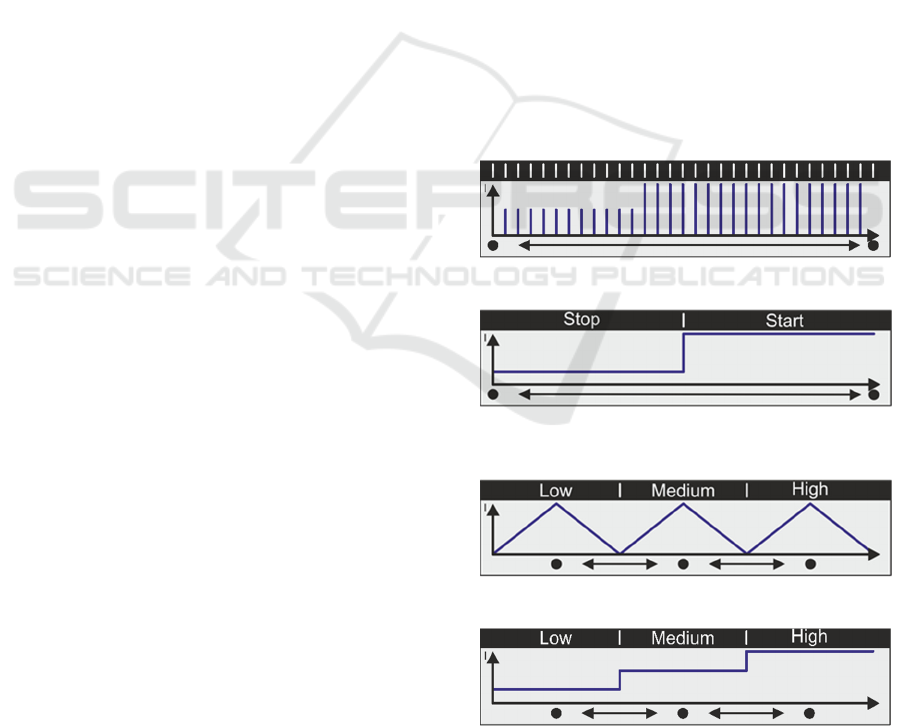
discrete (Fig. 1a) and continuous feedback (Fig. 1b).
The tactile coding feature describes a single point, a
so-called tick mark of the slider on the touch user
interface, which can indicate to the user, for example,
a middle as well as a beginning and end or maximum
and minimum values by means of a tactile intensity
change (Fig. 1c). Tactile coding progressions, on the
other hand, describe areas such as the increase or
decrease in tactile feedback in a defined range (Fig.
1b). (Schmid & Maier, 2020)
2 METHOD
The research of Winterholler demonstrates the
possibility to transfer haptic information by coding of
physical rotary control elements. (Winterholler 2019)
In contrast, this study investigates electro-tactile
information coding using virtual sliders on an electro-
tactile touch user interface (Fig. 2). The slider control
elements differ in the type of tactile feedback. For this
purpose, five different control elements are
implemented based on discrete or continuous
feedback. With discrete feedback, the user feels
individual feedback impulses with his finger during
the adjustment process, similar to a slider with tick
marks. With continuous feedback, on the other hand,
the user perceives continuous tactile feedback with
his finger during the adjustment process. In addition
to the discrete or continuous feedback, the intensity
level of the feedback also varies.
This is why this study focuses on the information
coding on the one hand of a fine adjustment task, in
particular for adjusting a defined value along a scale,
and on the other hand the coding of different areas
along a scale. Fig. 1 shows the five different
indicators. Each slider is built on a scale (x-axis)
coded by different characteristics and intensity levels
(y-axis) of tactile feedback. Fig. 1a shows the
characteristic of a discrete tactile feedback. This
means the test person feels different feedback marks
while sliding along the virtual scale. The tactile
coding of control element 2 represents a continuous
input in two ranges (“Stop”-“Start”) with different
intensities of tactile feedback (Fig. 1b). The aim of
this tactile area coding is to investigate whether a
separation of two ranges is perceptible by the
intensity level and contributes to a better performance
of the main task. Control element 3 characterises
continuous feedback with three tick marks. In
contrast to control element 1, the marking of the tick
marks is achieved by continuously increasing and
decreasing intensity along the virtual slider. When the
test person slides along the virtual slider, hill and dale
are perceived, which are generated by the variation of
the intensity level (Fig. 1c). The fourth control
element contains the same function as control element
3. A distinction is also to be made between the three
setting ranges. In contrast to control element 3,
however, the ranges are coded by three continuously
different intensity levels. (Fig. 1d). Interface element
5 has a feedback impulse to separate the ranges
“Reset” and “Start”. If the user sets the slider from
“Start” to “Reset”, he feels a short resistance at the
transition, which represents the transition between the
two ranges (Fig. 1e).
The study evaluates whether the tactile feedback
supports the operation of the five interface elements
and thus improves the concentration on a main task
performed in parallel. It should also be determined
whether the operation with electro-tactile feedback
requires less effort.
a) Interface element 1: discrete input
b) Interface element 2: continuous input with discrete
markers
c) Interface element 3: continuous input
d) Interface element 4: continuous input
Figure 1a: Schematic structure of the tactile coding of the
interface elements 1-4.
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
38

e) Interface element 5: continuous input with a discrete
mar
k
Figure 1b: Schematic structure of the tactile coding of the
interface element 5.
Besides the schematic representation of the tactile
coding of the control elements, Fig. 2 shows the
implemented test interface with which the adjustment
tasks are carried out. Fig. 2 demonstrates the
start/stop module, the module for CO
2
pressure, the
gas flow module as well as the smoke extraction
module and gas consumption module.
Figure 2: Test interface of the slide control elements for the
adjustment tasks with electro-tactile feedback.
2.1 Participants
For the experiments 15 volunteers are available, 11 of
them men and 4 women aged 22 to 35 years. The
average age is 26 years (SD=3.05 years). None of the
test persons pursues a hobby or a job that puts so
much strain on the fingertips that their sensation
would be severely restricted. Test persons suffering
from skin or nerve diseases of the hands are also
excluded. All test persons are students in a technical
course of studies or academic employees of the
institute. The test persons have no experience with the
existing type of haptic feedback on touch screens. The
test duration is about 30 minutes.
2.2 Test Setup
The experimental set-up consists of a main and a
secondary task (Fig. 3). The use case for the
investigation of electro-tactile slider operation is in
the field of medical technology. In a medical
intervention the focus lies on the human being or the
operating field, within which very precise work must
be carried out. Therefore, the main task of this
experimental setup is to perform a dexterity task,
which requires concentrated work. The secondary
task in the operating theatre can, for example, be the
operation of medical equipment. Therefore, the main
task of the experiment is to hold a stylus with its
metallic tip in a 5 mm diameter hole as still as
possible without touching the edge. For this purpose,
the circuit board for the main task is placed to the
dominant hand of the test person. The main task is
therefore performed with the dominant hand, while
the arm is slightly bent but not supported. The contact
of the stylus with the edge of the hole is detected.
Similarly, in this test scenario, the electro-tactile
display is to be operated parallel to the dexterity task.
The secondary task is an adjustment task on the
electro-tactile touch interface. The electro-tactile
display with the test user interface is placed beside
the test person. The tablet is connected via a cable to
a laptop on which the test program is opened.
Figure 3: Experimental set-up.
2.3 Experimental Procedure
After the welcome, the investigator informs the test
person about the operation of the test user interface
and the test procedure. This is followed by
information on privacy, consent to the study and the
collection of demographic data. In addition to age and
gender, it is also recorded whether the test person has
a hobby or a disease that would result in a reduction
in fingertip sensitivity. In the subsequent introductory
Main Tas
k
Secondar
y
Tas
k
Sub
j
ect
Investi
g
ator
Tactile Information Coding by Electro-tactile Feedback
39

and learning phase, the test person is allowed to test
the controls, feel the feedback and become familiar
with the perception. No further explanations of the
haptic feedback are given.
During the test, 11 different adjustment tasks are
performed on the five control elements with and
without haptic feedback. The adjustment tasks were
selected on the basis of a benchmark for the operation
gas insufflation. For this purpose, the operation of gas
insufflation in everyday clinical practice was
analysed and the operation was transferred to the use
case tested in this study with regard to electro-tactile
feedback. The different adjustment tasks are
performed with the non-dominant hand, while the
main task is performed in parallel with the dominant
hand. An adjustment task must always be carried out
in a sliding movement without settling. As soon as the
correct position of the main task is assumed, the
experimenter gives a signal, whereupon the
adjustment task may be started. There are four
adjustment tasks for control element 1. Two
adjustment tasks are also carried out for control
element 2, 3 and 4. One adjustment task is provided
for control element 5. The exact adjustment tasks are
listed below in table 1.
Table 1: Adjustment tasks for experimental procedure.
Tas
k
Description Type of Feedbac
k
A1
Set slider value from 0
to 12
control element 1
A2
Increase slider value of
12 b
y
6
A3
Decrease slider value of
18 by 2
A4
Set slider value from 18
to 26
A5 Set slider to "Start
control element 2
A6 Set the slider to “Stop”
A7
Set the slider from
“Low” to “High”
control element 3
A8
Move the slider from
“Hi
g
h” to “Medium”
A9
Move the slider from
“Low” to "Hi
g
h”
control element 4
A10
Set the slider from
“High” to "Medium”
A11 Set the slider to “Reset” control element 5
After each adjustment task, the task completion of
the secondary task, the setting time, the errors
concerning the primary task, the distraction caused by
the haptic feedback, as well as the effort during the
adjustment task of the test person are recorded. The
respondent using a 7-level Likert scale evaluates the
test criteria distraction through feedback and the
effort during the adjustment task.
3 RESULTS
The results of the study are presented below. First, the
comparative presentation of the results of the
measured values recorded during operation without
and with haptic feedback are presented. These
parameters include the objectively measured
variables such as task fulfilment, setting time and the
number of errors of the main task. The effort during
the adjustment task of the test persons as well as the
distraction caused by the feedback was also recorded
by a subjective survey.
3.1 Task Fulfilment of the Secondary
Task
There are no differences concerning the task
fulfilment of the adjustment task executed with and
without tactile feedback. With regard to the task
fulfilment of the adjustment task, no significant
differences between the control tasks and the design
of the electro-tactile feedback of the control elements
could be identified.
3.2 Setting Time
Fig. 4 shows the recorded setting times of all
feedback variants. For comparison, the setting times
per adjustment task for operation without and with
feedback are placed next to each other. Each
adjustment task is plotted in form of a box plot in
order to be able to draw conclusions about the
dispersion of the adjustment task. The setting times
vary between 0.14 and 5.21 seconds. For tasks A1,
A2, A3, A4, A5 and A8, the setting times change only
minimally from operation without to operation with
haptic feedback. For the other five tasks (A6, A7, A9,
A10), the setting times are slightly longer when
operating with than without feedback. For task A9,
the setting time is even increased by almost 47%. The
trend thus shows an increase in setting time due to
haptic feedback. Therefore, the control elements 1 to
5 were tested to significant differences by a Wilcoxon
Test. With the exception of A 11, no significant
differences in setting time were found between the
control elements concerning the adjustment tasks A1
to A11 with and without haptic feedback. A
significant difference (z=-2.471, p=0.015, n=15) was
found for A 11. Consequently, in this study the setting
time with haptic feedback is not significantly higher
than without feedback.
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
40
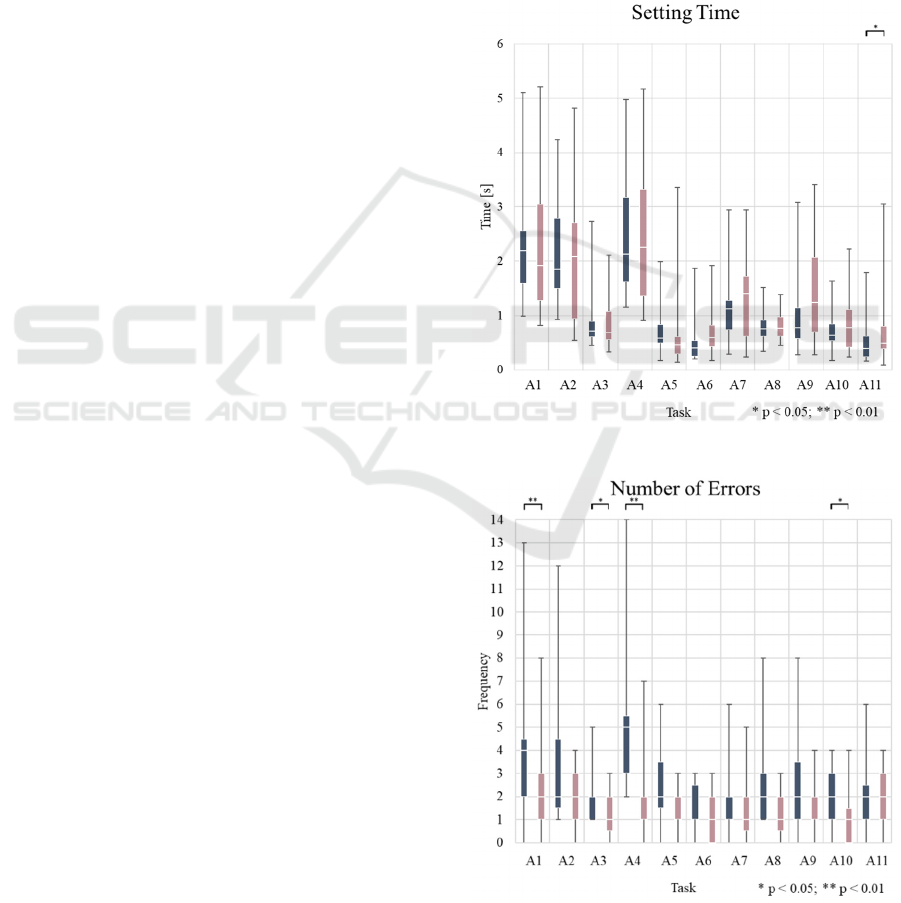
3.3 Error Number of the Main Task
Fig. 5 shows the number of errors. The number of
errors are the contacts with the edge of the bore during
the execution of the main task. It can be seen that the
number of touches is lower when performing a
secondary task with haptic feedback. The greatest
improvement in the average number of contacts can
be seen with adjustment task A4 (Fig. 4). In this task,
the slider is set from the value 18 to the value 26.
However, it should also be mentioned that the
variance of the measured values is particularly high.
Consequently, the number of touches varies greatly
among the test persons. In a difference test, using the
Wilcoxon test it is also evident that the differences in
control element 1 are significant concerning the
adjustment tasks A1, A3 and A4. With regard to
adjustment task A1 (z=-2.659, p=0.008, n=15) and
A4 (z=-3.190, p=0.001, n=15), the difference in
operation with and without haptic feedback is high
significant lower. For control element 2, 3 and 5, on
the other hand, the haptic feedback has no significant
effect on the number of touches for the main task.
Further significant differences are found for task A10
(z=-2.292, p=0.022, n=15). Here, too, the haptic
feedback results in a lower number of touches of the
main task.
3.4 Effort during Adjustment Task
The box-plot diagram in Fig. 6 shows the results in
terms of the effort during the adjustment task. The
evaluation results vary between no effort and high
effort. The highest effort is in the fourth task (A4).
The averaged effort here is 4 out of 6. The effort for
task A5 is only minimally higher on average when
operating without haptic feedback than when
performing task A6. Comparing task A7 and A9, on
average, the effort involved in operating without
feedback is slightly higher for control element 3 than
for control element 4. The two control elements differ
only in the way they provide haptic feedback.
Fulfilling the task with feedback requires on average
the same stress with task 7 as without feedback. The
effort induced by task A11 is rated as the highest. To
have a closer look at the results a Wilcoxon Test was
conducted. As we can see in Fig. 5 the effort of task
A1 (z=-2.460, p=0,014, n=15), A2 (z=-2.373,
p=0,018, n=15), and A3 (z=-2.310, p=0,021, n=15) is
significant less rated concerning the adjustment task
with and without electro-tactile feedback. Also task
A4 (z=-3.671, p=0,001, n=15), A10 (z=-2.598,
p=0,009, n=15) and A11 (z=-2.739, p=0,006, n=15)
show a high significant better rating.
3.5 Distraction through Feedback
The results of the evaluation of how much attention is
paid to haptic feedback during a task are shown in
Fig. 7 as a box plot across all adjustment tasks. The
evaluation is on a scale from no distraction to high
distraction. The median values lie between three for
A1 and four for the tasks A3 and A7 to A11.
Furthermore, it is noticeable that for the tasks A5 and
A6, with an average rating below three, somewhat
less attention is paid to feedback than for the tasks at
the other control elements. In tasks A9 and A10 on
Figure 4: Setting time concerning the secondary task.
Figure 5: Number of errors concerning the main task.
Tactile Information Coding by Electro-tactile Feedback
41
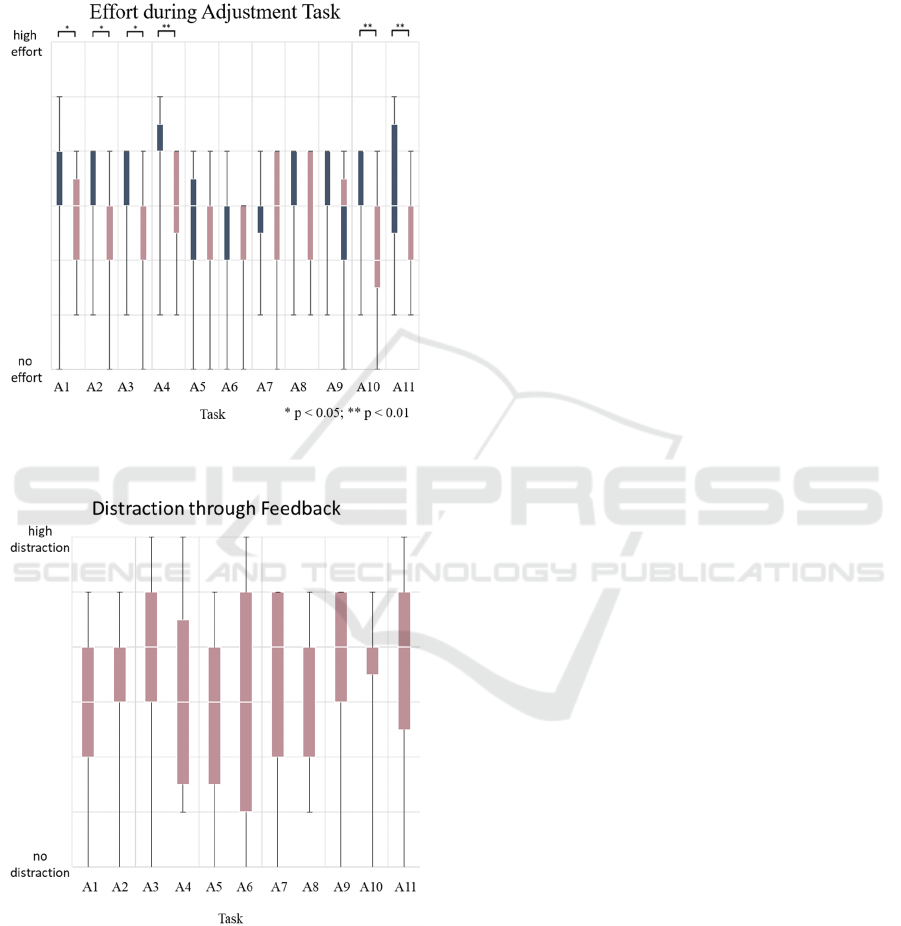
control element 4, on average a little more attention
is paid to haptic feedback than in tasks A7 and A8.
For task A11, haptic feedback is also used relatively
heavily. The median value here is four. Significant or
high significant differences could not be found.
Figure 6: Effort of the secondary task during operating in a
main task.
Figure 7: Distraction caused by the electro-tactile feedback
operating in a main and secondary task in parallel.
4 DISCUSSION
Using control element 1, it is evident that it makes
sense to code an interface element with short tick
mark distances by means of haptic feedback pulses.
On the one hand, the error rate on a task performed in
parallel during operation is improved (Fig. 5), on the
other hand the operation is perceived as significantly
less strenuous, as can be seen in Fig. 6. The feedback
contributes greatly to orientation on the control
element. Adjustment tasks with feedback pulses of
higher intensity (tasks A2, A3 and A4) show stronger
improvement values. This leads to the conclusion that
a consistently strong feedback is more suitable. With
small changes in settings and strong feedback, the tick
marks are partly counted via the tactile feedback
pulses. In theory, even blind operation would be
conceivable here. Moreover, the feedback feels
pleasant for many test persons.
With both adjustment tasks (A5 & A6), control
element 2 shows an improvement both in errors on a
parallel activity and in the induced effort (see Fig. 5
and 6). This indicates that the haptic feedback
facilitates operation even with a short adjustment
distance and the change between only two states. The
execution of task A5 is somewhat more difficult.
However, the ability to concentrate on the parallel
task is improved more than in task A6. The induced
effort, on the other hand, is improved more by the
haptic feedback in task A5.
In comparison of control element 3 and 4, the
haptic course with the intensity jumps causes a
stronger improvement than the haptic course with the
extreme points of intensity. When performing tasks
A5 and A7, the greatest difference between the two
haptic progressions can be seen. While the effort does
not change for control element 3 and the errors of the
main task improves by only about 8%, it improves by
about 27% for control element 4 and effort by about
15% (Fig. 6). This reveals that for control elements
with three ranges and large distances between them,
a jump in feedback intensity is preferable. However,
even here the test persons cannot feel the exact
location of the haptic feature (intensity jump).
However, they recognize the different intensity levels
in the different ranges.
Control element 5 is the only one that shows a
greater improvement in effort required for operation
than for concentration on parallel activity (Fig. 5 and
6). Consequently, the haptic feedback facilitates the
task. The test persons experience a clear support by
the feedback and feel a significantly lower effort.
The haptic feedback has a positive effect on all
control elements. The accuracy of the execution of a
parallel activity is improved for all control elements.
The haptic feedback during operation also has a
positive effect on the perceived effort during the
execution of a parallel task for all control elements.
CHIRA 2020 - 4th International Conference on Computer-Human Interaction Research and Applications
42

5 CONCLUSION
The study reveals that the test persons can concentrate
better on their main activity if they feel a haptic
feedback when operating the touch user interface in
parallel. The reduction in the number of touches
across all test subjects and all five control elements is
37% overall. The greatest improvement in errors
concerning the main task on parallel activity is found
at control element 1. The individual feedback
impulses contribute to orientation, are partially
counted and improve the concentration on the parallel
task the most. The subjectively induced effort is
experienced as less when operating the user interface
in parallel with haptic feedback than operating
without haptic feedback. The setting time, however,
shows an increase over all tasks and test persons. In
addition, the feedback used for the control elements
feels too weak. The information coding behind the
haptic feedback is also partly not intuitively
understandable. This should be further improved.
After a short explanation at the end of the test, the
coding could usually be understood quickly. It is
therefore interesting to see how much the errors of the
main task improves when the test persons are briefly
introduced to the coding logic of the feedback before
the start. Exercise also leads to a better use of the
feedback and further contributes to an increase in the
ability to concentrate and a reduction in effort. The
setting time, which tends to increase with feedback
also shortened through practice.
In conclusion, the haptic feedback has a high
potential with touch screens. There is a great level of
freedom in design and a wide variety of technical
approaches to implementation. In addition, this study
is able to show that haptic feedback at the user interface
both improves the concentration on a parallel activity
and reduces the effort during operation.
ACKNOWLEDGEMENTS
This work is founded by the German Research
Foundation (DFG) within the scope of the research
project “Ageing-appropriate adaptive electro-tactile
touch user interfaces in a translatory application”,
grant MA 4210/6-3.
REFERENCES
Harrison, C., Hudson, S. (2009). Providing dynamically
changeable physical buttons on a visual display. In
Proceedings of the 27th International Conference on
Human Factors in Computing Systems. Boston (pp.
299-308). ACM Press.
Hoggan, E., Brewster, S. A. & Johnston, J. (2008).
Investigating the Effectiveness of Tactile Feedback for
Mobile Touchscreens. In Burnett, M., Constabile, M.
F., Catarci, T., Ruyter, B.,,Tan, D., Czerwinski, M. &
Lund, A. (Hrsg.) Proceedings of the 26th Annual
Conference on Human Factors in Computing Systems.
New York (pp.1573-1582). ACM Press.
International Organization for Standardization. (2011).
Ergonomie der Mensch-System-Interaktion. Teil 910-
Rahmen für die taktile und haptische Interaktion (EN
ISO 9241-910).
International Organization for Standardization. (2017).
Ergonomie der Mensch-System-Interaktion. Teil 112-
Grundsätze der Informationsdarstellung (EN ISO 9241-
112).
Koskinen, E., Kaaresoja, T., Laitinen, P. (2008). Feel-good
touch: Finding the most pleasant tactile feedback for a
mobile touch screen button. In Proceedings of the 10th
International Conference on Multimodal Interfaces.
Chania (pp. 531-538). ACM Press.
Schmid, P., Winterholler, J., Maier, T. (2019).
Untersuchung zum Entlastungspotential des visuellen
Informationskanals durch das nutzerzentrierte Design
eines Drehbedienelements. Stuttgarter Symposium für
Produktentwicklung 2019.
Schmid, P., Maier, T., Wizani, M. (2019). Electro-tactile
feedback as support for an adjustment task on touch
control elements?. In: eProceedings Human Systems
Integration (HSI). Biarritz.
Schmid, P., & Maier, T. (2020). Adaptiv elektrotaktile
Feedbackgestaltung zur Kompensation altersbedingter
Verluste bei der Bedienung von Touch-Bedien-
oberflächen. GfA Frühjahrskongress 2020: Digitaler
Wandel, digitale Arbeit, digitaler Mensch? GfA
Frühjahrskongress.
Siegmann, S. & Notbohm, G. (2013). Noise in hospitals as
a strain for the medical staff. In: The Journal of the
Acoustical Society of America. 133(5). 3453.
VDI/VDE, Gesellschaft Mess- und Automatisierungs-
technik. (2015). Gebrauchstaugliche Gestaltung von
Benutzungsschnittstellen für technische Anlagen. Blatt
3: Merkmale, Gestaltung und Einsatzmöglichkeiten von
Benutzungsschnittstellen mit Touchscreens. VDI/VDE
3850.
Winterholler, J. (2019). Haptische Informationsüber-
tragung von Drehmomentverläufen im Kontext einer
Haupt- und Nebenaufgabe. Universität Stuttgart,
Stuttgart. Institut für Konstruktionstechnik und
Technisches Design, Forschungs- und Lehrgebiet
Technisches Design, Dissertation.
Tactile Information Coding by Electro-tactile Feedback
43
