Overview of Ship Dynamic Positioning Control System
Xiaoyu Wang
1, a
1
School of Energy and Power Engineering, Wuhan University of Technology, Wuhan 430063, China
Key
words: Marine Engineering; Dynamic Positioning; Control; Research Progress.
Abstract: Ship dynamic positioning control system is one of the important technologies in shipping industry. With the
continuous development of the economy, the requirements of ship field for dynamic positioning control
system are higher and higher. This paper will briefly introduce the composition, working principle, controlling
algorithm research progress and research status of ship dynamic positioning system.
1 INTRODUCTION
With the rapid development of global economy, the
world's land resources are gradually in short supply.
In order to obtain more abundant oil, rare metals and
other resources, the human development field has
been expanding to the ocean, promoting the
development of ships and marine engineering, and the
technology of dynamic positioning has been
gradually developed. In recent years, with the
continuous extension of marine engineering to the
deep level, many kinds of ships emerge in an endless
stream, and the ship's control system is also
increasingly perfect. As one of the more advanced
ship operation control system, the dynamic
positioning system is more and more widely used in
military ships, modern ocean platforms, scientific
research ships, tugs and diving rescue boats.
According to statistics, China's annual market
demand for dynamic positioning control costs about
2 billion yuan, with more than 200 potential dynamic
positioning control ships (Xiaobin Qian, 2018).
2 DYNAMIC POSITIONING
CONTROL SYSTEM
Ship's dynamic positioning system is a typical closed-
loop control system, including measurement system,
propulsion system, power system and control system.
Its working principle is to obtain the deviation
between the current ship state and the expected state
through the measurement system, and the control
system processes and calculates the required thrust.
The propulsion system uses multiple thrusters from
multiple angles to provide the corresponding power,
which is used to resist and eliminate the interference
of wind, wave, current and other environmental
forces in the ship operation, so as to make the ship
stay in the designated sea area as much as possible.
This system originates from offshore oil and gas
platforms (Xiaobin Qian, et.al, 2017). The main
functions of ship dynamic positioning control system
include station keeping, auto pilot, joystick, heading
control, follow target, auto track, etc.
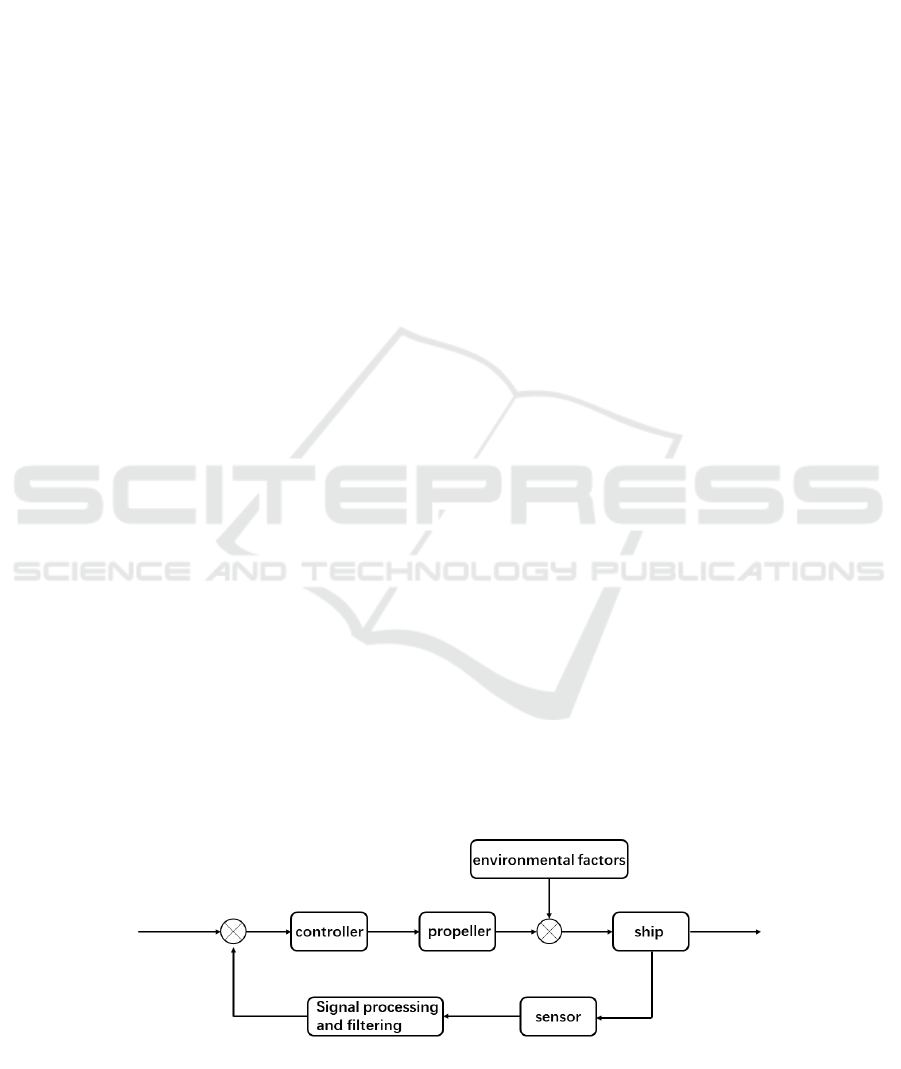
Figure 1: The structural diagram of the ship's dynamic positioning system.
54
Wang, X.
Overview of Ship Dynamic Positioning Control System.
DOI: 10.5220/0010022100540056
In Proceedings of the International Symposium on Frontiers of Intelligent Transport System (FITS 2020), pages 54-56
ISBN: 978-989-758-465-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Compared with the traditional mooring system,
the ship dynamic positioning system has the
following advantages: High positioning accuracy,
outstanding flexibility, higher safety and reliability,
fast positioning, no seabed and water depth, etc. the
limited cost is fixed, the cost of traditional offshore
platform will not increase with the increase of water
depth, the system has strong controllability, can
effectively avoid the dangerous situation generated in
the traditional anchoring process, and can produce
rapid response to the interference of the environment
(Minjie Zheng, 2018). The structural diagram of the
ship's dynamic positioning system is shown in Fig. 1.
3 SYSTEM COMPOSITION
3.1 Measurement System
This system plays an important role in the precise
work of the whole dynamic positioning system. It can
be said that the measurement system is the
performance guarantee of the dynamic positioning
system. The measurement system is divided into two
systems, reference system and sensor. The reference
systems commonly used in dynamic positioning of
ships are mainly satellite positioning, underwater
acoustic positioning and tension locking systems.
3.2 Propulsion System
This system is the actuator of the dynamic positioning
system. When the dynamic positioning system is
started, the system will make a positive response to
the command sent by the control system, and generate
appropriate forces and moments to eliminate the
interference of the surrounding environmental forces
on the position of the ship. Maintain the running track
or position of the ship.
3.3 Control System
The workload of this system is very heavy and it is
the key part of the whole system. By measuring the
deviation of the system to deal with the accurate
calculation of the power distribution problem. The
control effect in the control system is often reflected
in the control technology. The ship's motion control
technology has been constantly updated and
improved. From PID control when the dynamic
positioning system just appeared, it has experienced
adaptive control, optimal control, robust control, to
the most advanced and extensive English intelligent
control. Intelligent control has gradually replaced the
traditional control technology (Rong Zhen, 2012).
4 RESEARCH PROGRESS OF
SHIP DYNAMIC POSITIONING
CONTROL ALGORITHM
From the emergence of dynamic positioning
technology now, the core of dynamic positioning
control algorithm research and development can be
divided into three stages. The first stage is to use the
classical PID control algorithm to realize the control
of the working ship, and to control the free degree
movement of the ship in three aspects: sway, surge
and yaw. In the second stage, the combined control
method of filtering and optimal control is used. This
method improves the security and robustness to a
certain extent, and is widely used in modern
commercial ships. However, this control method has
large errors and the calculation process is too
complex (Cong Liu, 2018). The third stage is to use
the new intelligent control algorithm, including
robust control, nonlinear model predictive control,
neural network control and fuzzy control. They have
higher positioning accuracy, can ensure the reliability
of position information obtained by measurement,
and make the ship gradually move towards intelligent
development in the direction of dynamic positioning
(Dandan Wang, 2010).
5 RESEARCH STATUS OF SHIP
DYNAMIC POSITIONING
CONTROL SYSTEM
5.1 PID Control Technology
In the early 1960s, dynamic positioning system was
applied to the exploitation of marine resources. In
1961, PID control system was adopted by the first
batch of ships with dynamic positioning system in the
world. The system controls the three degrees of
freedom of the ship and calculates the required thrust
by measuring the deviation of the ship position and
heading angle. The advantages and disadvantages of
this method are very obvious. It has the advantages of
good stability, high security, simple calculation and
easy design. At the same time, it also exposes the
disadvantages of the control function of the controlled
object with variable parameters. When the ship and
the surrounding environment change, the parameters
of the PID control system must be reset.
Overview of Ship Dynamic Positioning Control System
55

5.2 Linear Optimal Control
Technology
Due to the poor control effect of some parts of the PID
control system, the research of linear optimal control
technology is promoted. The system divides the
mathematical model of a ship into high and linear
optimal control technology, which can effectively
solve the problem of phase lag in the first generation
of a dynamic positioning system. Moreover, response
speed and accuracy meet the requirements.
5.3 Nonlinear Control Technology
There are many non-linear factors that can't be
liberalized in the process of ship's fixed force
positioning. This technology can deal with the non-
linear factors in the process of ship operation, and can
deal with the non-linear problems directly. It is
precisely because this feature can effectively improve
the control performance and safety performance of
ship positioning work, and has a considerable
compensation for the interference in the external
environment.
5.4 Intelligent Control Technology
In recent years, with the rapid development of
computer related technology, artificial intelligence
has rapidly entered human life, and the development
of control theory has also been greatly promoted.
Only control technology has the characteristics of
imitating human to a certain extent, which has a good
effect on solving the problem of difficult to establish
a mathematical model. Because each intelligent
control technology has its own advantages, how to
use different intelligent control technologies together
is also an important research direction nowadays
(Yang Liu, 2013).
6 OUTLOOK AND SUMMARY
The control of the dynamic positioning system is
always difficult to achieve perfectly, because of the
nonlinear complexity of the ship system, the
uncertainty of the parameters of the model and the
external disturbance, and the change of the internal
state is not easy to measure. How to effectively solve
the above problems is an important research topic in
the field of control theory.
Dynamic positioning system is widely used in
ship control system. Compared with traditional
anchoring positioning, it has obvious advantages and
has gradually become a key technology in the field of
deep-sea ships and offshore platforms. China is rich
in marine resources and has an immeasurable
prospect of exploitation and utilization. The only way
to achieve sustainable development is to develop the
dynamic positioning ship control technology at a high
speed, which has important utilization value.
ACKNOWLEDGMENTS
This work was supported by the Fundamental
Research Funds for the Central Universities [WUT:
2019-ND-B1-13].
Author's research direction: New energy; Energy
management; Ship shore power.
REFERENCES
Cong Liu. Research on Application of Active Disturbance
Rejection Control for Dynamic Positioning Ships
Control ([D], Harbin Engineering University, China
2018).
Dandan Wang. Research on Relative Dynamic Positioning
Method between Rescue Vessel and Wreck Vessel
([D], Harbin Engineering University, China 2010).
Minjie Zheng. Research of Sampled-data Control for
Singular System and Its Application to Ship Dynamic
Positioning System ([D], Shanghai Jiao Tong
University, China 2018).
Rong Zhen. Design and Application of Daptive PID in Ship
Course Leading Autopilot ([D], Dalian Maritime
University, China 2012).
Xiaobin Qian. Research on Nonlinear Model Predictive
Control for Dynamic Positioning Ship ([D], Dalian
Maritime University, China 2018).
Xiaobin Qian, Yong Yin, Xiaofeng Sun, Xiufeng Zhang.
Overview of Ship Dynamic Positioning Simulator [J].
Journal of Chongqing Jiaotong University (Natural
Science), 2017, 36(02):108-114.
Yang Liu. Research on Intelligent Control and Thrust
Distribution for Dynamic Positioning ([D], Dalian
Maritime University, China 2013).
FITS 2020 - International Symposium on Frontiers of Intelligent Transport System
56
