
Machine Learning System for Rainfall Estimates from Single
Polarization Radar
Tinar Pamuji Waskita
1,2
, Adhi Harmoko Saputro
1
Ardhasena Sopaheluwakan
2
and Muhammad
Ryan
2
1
Department of Physics, Faculty of Mathematics and Sciences, Universitas Indonesia, Depok 16424, Indonesia
2
Agency for Meteorology, Climatology and Geophysics, Jakarta 10720, Indonesia
Keywords: rainfall, radar, machine learning, multi layer perceptron
Abstract: Rainfall becomes one of the weather parameters that is most widely considered because the phenomenon of
its occurrence can significantly affect human activities, including in agriculture, plantations, fisheries,
transportation and others. In addition, rainfall information is very important to do weather analysis, especially
in analyzing the occurrence of floods caused by heavy rains so there is a need for accurate rainfall information.
This study aims to obtain an optimal rainfall estimation system at locations where there is no direct rainfall
observation data. Machine learning is one branch of artificial intelligence that provides a learning system for
machines to learn automatically without explicit instruction. The machine learning used in this study is Multi
layer perceptron (MLP), with backpropagation as a gradient value search algorithm and adam optimizer as an
optimization function. The structure of the MLP used is 2 hidden layers which in the first hidden layer uses 7
neurons with a hyperbolic tangent activation function and the second hidden layer contains 3 neurons and the
activation function is sigmoid and finally the output layer, the activation function used is pure linear. MLP
system input data is radar data, reflectivity, radial velocity, spectrum width and radar rain estimation data
which are validated with automatic rain observation data around the Single Polarization Radar observation in
Yogyakarta. The results using MLP can improve rain detection accuracy by 79% and reduce the error value
in the estimated rainfall.
1 INTRODUCTION
Indonesia is a humid archipelago and equatorial
monsoon region (Tjasyono, B.H.K., and Harijono,
S.W.B, 2007), many hydrometeorological natural
disasters occur throughout the year, including
Yogyakarta. Hydrometeorological disasters are
disasters related to changes in the normal water cycle,
such as flash floods (Minervino, A.C and Duarte, E.C,
2015). Hydrometeorological disasters in the current
period show an increasing trend (Adi S. , 2013).
Hydrometeorological disasters can seriously damage
infrastructure, significant economic losses and often
loss of life (Paul, S.H., Sharif, H.O., and Crawford,
A.M.G, 2018). Rainfall is precipitate in liquid form
which is largely a direct result of the condensation of
water droplets in the clouds, followed by growth to a
size large enough to overcome the effect of air
buoyancy forces (Tjasyono, B.H.K., and Harijono,
S.W.B, 2007) .
Single polarization radar is a remote sensing
technology that can be used to determine the
distribution of rain in locations where there is no
rainfall measurement tool. A single polarization radar
measures rainfall in real-time and provides high-
resolution data for short-term rainfall forecasts, also
known as nowcasting (Codo, M., and Rico-Ramirez,
M.A., 2018). Radar emits electromagnetic waves at
the frequency of microwaves in the form of pulses
into the atmosphere through the transmitter. When a
pulse hits an object, the electromagnetic wave is
partly returned to the weather radar which is received
as reflected energy called reflectivity. The amount of
reflectivity depends on the physical parameters of the
object.
Radar transmits microwaves and receives
backscattering radiation from precipitation particles
through radar reflectivity (Z), which is related to
rainfall rate (R) using a semi-empirical equation of
the form Z = a𝑅
(Germann, U., Galli, G. Boscacci,
M., and Bolliger, M., 2006). However, parameters a
Pamuji Waskita, T., Harmoko Saputro, A., Sopaheluwakan, A. and Ryan, M.
Machine Learning System for Rainfall Estimates from Single Polarization Radar.
DOI: 10.5220/0009409400410048
In Proceedings of the International Conferences on Information System and Technology (CONRIST 2019), pages 41-48
ISBN: 978-989-758-453-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
41
and b of the Z-R relation equation are known to
depend on rainfall type and rainfall size distribution.
The use of the constant Z-R relation equation
contributes to errors in the estimation of radar rainfall
(Harrison,D.L., Driscoll,S.J., and Kitchen,M , 2000).
Radar has limitations that cause errors in
estimating rain and rain forecasts by nowcasting,
when the distance from the radar increases, naturally
there is also an increase in the volume of radar
sampling (Rico-Ramirez, M.A., and Cluckie, I.D,
2007). At higher altitudes, the distribution of the
hydrometeor changes, causing a difference between
the measured rainfall and the rainfall that actually
falls to the ground, so it is necessary to determine the
right technique for estimating using radar. The Single
Polarization Radar in Yogyakarta is a Baron branded
C-Band radar, which has a frequency of 5.2-5.9 GHz
and a wavelength of 5-5.7 cm and Radar Yogyakarta
began operations in 2016. In this research, a statistical
/ engineering based approach is used to improve the
estimation of rainfall in Yogyakarta's Single
Polarization Radar using VCP 21 with 9 elevations.
There are two classifications of rain estimation
techniques using radar, namely: Physical-based
techniques and statistical / engineering-based
techniques (Bringi, V. N. and Chandrasekar, V,
2001). Physically based techniques are used to find
the relationship between the observation radar and
precipitation levels of observation, such as the use of
relational equation Z-R precise in determining the
estimated rainfall while using statistical techniques
such as machine learning algorithms.
Machine learning is an application of artificial
intelligence (AI) that provides a system of ability to
learn automatically and improve from experience
without being completely programmed
(Chandrasekar, V., Tan, H., and Chen, H.,
2017)(Chandrasekar, Tan, and Chen, 2017). Machine
learning spends on developing computer programs
that can be accessed and used for self-study. The
machine learning used in this study is a multi-layer
perceptron (MLP), with backpropagation as a
gradient value search algorithm and adam optimizer
as an optimization function. The structure of the MLP
used is 2 hidden layers which in the first hidden layer
uses 5 neurons with a hyperbolic tanget activation
function and the second hidden layer contains 3
neurons and the activation function is sigmoid and
finally the output layer, the activation function used
is pure linear. MLP system input data is radar data,
reflectivity, radial velocity, spectrum width and radar
rain estimation data which are validated with
automatic rain observation data around the Single
Polarization Radar observation in Yogyakarta.
At the training stage of machine learning network
will produce the best network and the best network
will be tested with new radar data then verified. The
results of the verification value will show and
improve the rainfall estimation model using a single
polarization radar around the study area. An optimal
rainfall estimation system will further benefit weather
forecasters in providing early warning information
for heavy rainfall and in providing extreme weather
analysis at locations where there is no direct rainfall
observation.
2 STUDY AREAS AND DATASET
This study, the results of three radar data outputs are
reflectivity, radial velocity, and width spectrum and
the results of radar rain estimation using the Marshall-
Palmer Z-R relation, will be used as input for MLP.
The reflectivity data used are the CMAX(Z) product
reflectivity, the CMAX(Z) product reflectivity
deviation standard, the CAPPI(Z) product reflectivity
0.5 km and the CAPPI(Z) product deviation
reflectivity standard 0.5 km. For radial velocity and
spectrum width data used from CAPPI (V) 0.5 km
and CAPPI (W) 0.5 km. The use of CAPPI 0.5 km
product on reflectivity data, radial velocity data, and
width spectrum data due to the closest surface, for
CMAX products (taking maximum value) on the
reflectivity value can represent conditions vertically
at an altitude of 0.5-30 km (Ali, A and Hidayati,S,
2016). In addition, the distance between automatic
rainfall data and radar is included as additional input.
Furthermore, the 10 inputs are processed using MLP
and automatic rain observation data from an
automated weather station (AWS) will be used as a
target / model validation.
Observation rainfall data used as a comparison of
MLP is AWS data for 2017-2018 in 4 locations,
namely Kulon Progo, Gajah Mada University, Bantul
and Sleman. Data of Automatic rainfall observers is
accumulated per hour. The following is the
availability of AWS data shown in table 1.
Table 1. Automatic rainfall observation data used
Location Coordinate Total data
(mm/hours)
Kulon-Progo -7,890242;
110,100552
1342
Sleman -7,75016;
110,419759
550
Bantul -7,90736;
110,365048
3163
Gajah Mada
Universit
y
-7,7704589;
110,3798372
3111
CONRIST 2019 - International Conferences on Information System and Technology
42

Radar data is processed using python with 2 (two)
stages, namely the data extracting stage and the
training model stage. Data extracting stage is the
stage where the radar data value at the point of
observation of rainfall is automatically extracted.
After the radar product is extracted, the radar value is
used as a predictor while the observed rainfall value
is made a predictor in the MLP model.
The training stage of machine learning network
will produce the best network and the best network
will be tested with new radar data then verified. So
the results of the verification value will show and
improve the rainfall estimation model using a single
polarization radar around the study area. An optimal
rainfall estimation system will further benefit weather
forecasters in providing early warning information
for heavy rainfall and in providing extreme weather
analysis at locations where there is no direct rainfall
observation.
3 RESEARCH METHODOLOGY
3.1 Radar
A single polarization radar has three types of data
output namely reflectivity, radial velocity and
spectral width (Raghavan, 2003). Reflectivity (Z)
states the amount of energy reflectivity returning
from an object, depending on the size, shape and
composition of the object. The amount of energy
received by the radar is much smaller than the energy
that was transmitted at the beginning. The following
radar equation describes the calculation of the amount
of energy returned by the radar, which is very
dependent on the magnitude of the Power Transmit
and the type of radar band used, the greater the object
and the energy received, the greater the reflectivity
value.
𝑃𝑟
𝐾
(1)
Description:
Pr: average power of radio waves returned to radar
(watts)
Pt: Peak wave power emitted by radar (watts)
G: Antenna gain
H: length of radar pulses in the air (m)
θΦ: radi wave width in vertical and horizontal
(radians)
λ: wavelength emitted (m)
𝐾
: refractive index
r: distance from the radar to the target (m)
Z: Radar reflectivity factor (mm
6
/m
3
)
The first term of the equation above illustrates the
geometrical composition which will be represented
by the velocity of the electromagnetic waves which
refers to the velocity of light propagation. The second
term of the equation is about the parameters of the
radar system, consisting of the type of polarization
(horizontal and or vertical), antenna gain and
wavelength, the amount of power transmitter and the
amount of pulse used in operations. The resulting data
resolution will be greatly influenced by the choice of
sampling parameters, antenna speed and Pulse
Frequency Repetition used which all depend on the
radar system technical specifications. And the third
term depends on the distance and characteristics of
the target. The radar parameters are relatively fixed,
and if the transmitter is operated and used with a
constant output arrangement, the equation can be
simplified to:
𝑃𝑟
𝑍 (2)
Where C is a radar constant. The value of Z can be
calculated by the equation:
𝑍
∑
𝐷
(3)
Z values vary between 0.001 and 10,000,000, to make
it easier to understand, use a decibel scale:
𝑍
𝑑𝐵𝑍
10 𝑙𝑜𝑔
𝑍
(4)
dBZ=10𝑙𝑜𝑔
(5)
The value of Z is proportional to the sum of the entire
particle diameter raised to six in a sample volume,
because the size of the drops is usually measured in
millimeters (mm), and the volume is usually
expressed in units of cubic meters (m
3
), so Z has a
unit of mm
6
/m
3
.
For the purposes of hydrology connecting signal
strength with observed rainfall, an equation that
combines radar reflectivity and rainfall is needed.
This equation is the approach and empirical
relationship between Z and R. The relationship
between Z and R is drawn in exponential form, as
follows:
𝑍𝑎𝑅
(6)
Where a and b are positive empirical constants whose
value depends on the geographical location and
climate conditions / type of rain. The coefficient a
represents the condition for the median diameter of
the drop size in a sample volume. The greater the
value of a, the median size of drops in a sample
volume indicates a larger diameter. While the
coefficient b represents the equilibrium condition
changes in the size of the drops. The results of rain
estimation using the Marshall-Palmer Z-R relation is
Machine Learning System for Rainfall Estimates from Single Polarization Radar
43

used to master regional variability in the distribution
of raindrop sizes in Indonesia (M. Marzuki, H.
Hashiguchi, M. K. Yamamoto2, S. Mori and M. D.
Yamanaka, 2013).
Radar transmits electromagnetic waves using
units of power transmit and operational frequency.
Changes in frequency from higher droplets will be
processed and recognized as movements approaching
the radar, while changes in frequency from lower
echo replies are recognized as echos moving away
from the radar. Radar routinely measures speed and is
used to detect wind speeds, tornadoes, and hurricanes.
This echo movement data is called radial velocity (V)
data. Velocity radial data can be used as a validation
medium for echo reflectivity / intensity for the
forecaster to recognize meteorological and non-
meteorological echoes, because generally rain
patterns have different patterns from other echoes.
And especially for Ground Clutter echo has a zero
radial speed value. V data not only describes the
movement of rain particles, but Velocity data is very
helpful in describing phenomena in two scales,
namely the large scale (largescale) and small scale
(mesoscale). Large scale (largescale) describes
phenomena that occur in all regions and potential
SHEAR that supports rotation while small scale
(mesoscale) describes whether Converging,
Divergent or rotating winds are also used to diagnose
Couplets (two adjacent Inbound and outbound areas
to detect Convergence , Divergence or rotation).
The spectral width (W) data produced by the
weather radar is taken from processing the frequency
signal reflected by the object and received by the
weather radar. In one sampling volume each droplet
has a different speed and direction of motion, the
value of the deviation of each droplet is displayed by
the spectral width data. Information obtained from the
value of W in the form of air lability. A small width
value indicates that in the sampling volume there is
no difference in speed (stable) and a large width value
indicates there is a difference in the speed of the
hydrometeor in the sampling volume (unstable). W
value gives information about the possibility of
windshear, turbulence, mesocyclone.
Constant altitude plan position indicator (CAPPI)
is a radar product that is made based on the height
input desired by the user. The height referred to in this
product is the height of the MSL. It is recommended
to apply the Pseudo-CAPPI algorithm to maximize its
output, the height of this cappi product has the same
value both near and far from the radar. The CAPPI
algorithm will only display data available at the
desired height at each elevation available. When there
is no data at the desired height then the data is blank.
The Maximum Reflectivity (CMAX) product
represents the maximum reflectivity value between
two heights for each cell of volume. In other words,
able to show the maximum detectable reflectivity of
each pixel between the selected user height, including
the East-West and North-South profiles from the
maximum in the side panel. This product was
produced based on a volume scan. A minimum and
maximum height set by the user and defaults to 0.5
and 30 kilometers. The advantages of MAX products
include being able to display peaks and side views in
the same window so as to give a three-dimensional
(3D) impression of the weather situation. In addition,
ground clutter will be reduced when choosing a
bottom height that is higher than the radar installation
height. However, this product is less useful for data
speeds because only absolute speeds are displayed.
The product is very useful especially for reflectivity
data analysis to medium distances.
3.2 Multi Layer Perceptron (MLP)
MLP structure consists of input layer, hidden
layer and output layer. The back-propagation
algorithm is the most popular approach, which not
only overcomes the weaknesses of the large network
generated in the previous section, but also makes this
network a powerful tool for a number of other
applications, beyond pattern recognition
(Theodoridis, S., Koutroumbas, K., Koutroumbas, K.,
& Koutroumbas, K. , 2008). This approach is usually
to improve architecture and calculate synaptic
parameters so as to minimize the appropriate cost
function of the output. However, such an approach is
a difficulty in the discontinuity of the step function
(activation), promoting differentiation with respect to
unknown parameters. Synaptic weight The
perceptron multilayer architecture has so far been
developed by Nouron McCulloch-Pitts (Theodoridis,
S., Koutroumbas, K., Koutroumbas, K., &
Koutroumbas, K. , 2008). The most complex task to
implement the hardware artificial neural networks is
the non-linear activation function. Common
examples of activation function include hard-limiter,
saturated linear, hyperbolic tangent function and
sigmoid function (A. Armoto, L. Fanucci, E.P.
Scilingo and D.De Rossi, 2011).
The most common non-linear activation
functions, which are used in the artificial neural
networks, are the sigmoid function and the
hyperbolic, these functions are mainly used in
statistics, bio-mathematics, physics, engineering,
economic science, etc tangent (A. Armoto, L.
CONRIST 2019 - International Conferences on Information System and Technology
44
Fanucci, E.P. Scilingo and D.De Rossi, 2011). The
general equation is as follows:
𝑦
𝑑 (7)
where a, b, c and d are constants.
The sigmoid function is a particular case of Eq.
(7) where we put a = 1, b = 1, c = 0 and d = 0. The
equation thus becoming:
𝑦𝑆
𝑥
(8)
On the other hand, when a = 2, b = 2, c = 0 and d
= 1, the equation represents the hyperbolic tangent:
𝑦𝑇
𝑥
1
(9)
The following is a picture of MLP network
architecture in this study:
Figure 1. MLP network architecture
Adaptive Moment Estimation (Adam) is a very
popular training algorithm for deep neural networks,
implemented in many machine learning frameworks
(Bock & Weis, 2019). Adaptive optimization
algorithms, such as Adam and have proven better
optimization performance than stochastic gradient
descent (SGD) in several scenarios (Zhang, 2019).
According to Kingma & Ba (2015), the Adam
algorithm is a method that is easy to implement,
computationally efficient, has few memory
requirements, is not volatile for scaling gradients
diagonally, and is suitable for large problems in terms
of data and / or parameters. This method is also
suitable for purposes and problems that are not
stationary with gradients that have a lot of noise and
data that are not continuous.
In this study, MLP used has 2 (two) hidden layers,
which in the first and second hidden layers have
different activation functions. The first hidden layer
uses the sigmoid activation function and the second
hidden layer uses the tangent activation function, with
backpropagation as the gradient value finder
algorithm and Adam optimizer as the optimization
function. The structure of the MLP used 9 inputs, 2
hidden layers which in the first hidden layer uses 7
neurons with a hyperbolic tanget activation function
and the second hidden layer contains 3 neurons and
the activation function is sigmoid and finally the
output layer, the activation function used is pure
linear
The results of rainfall estimation using the
Marshall-Palmer Z-R relation is used to master
regional variability in the distribution of raindrop
sizes in Indonesia (M. Marzuki, H. Hashiguchi, M. K.
Yamamoto2, S. Mori and M. D. Yamanaka, 2013).
CAPPI (V) 0.5 km products and CAPPI (W) 0.5 km
products is used to identify winds in Indonesia, and
identified echo hooks using CAPPI (Z) 0.5 km
products and CMAX (Z) products (Ali, A and
Hidayati,S, 2016). To improve radar estimation based
on artificial neural networks with input reflectivity
data on average, standard deviation and distance on 3
cloned events in Darwin, Northern Territory,
Australia (Tsun-Hua, Y., Lei, F., and Lung-Yao, C., ,
2016). Meanwhile, TRMM-PR satellite data and
Radar data from CAPPI (Z) products 1,2,3, 4,5 km to
improve the estimated rainfall results in Melbourne
(Chandrasekar, V., Tan, H., and Chen, H., 2017).
Based on the references above, the inputs used in
MLP in this study are:
1. Maximum reflectivity / CMAX (Z)
2. CMAX(Z) standard deviation
3. reflectivity at an altitude of 0.5 km / CAPPI (Z)
0.5 km
4. standard deviation ofCAPPI (Z) 0.5 km
5. radial velocity at an altitude of 0.5 km / CAPPI
(V) 0.5 km
6. standard deviation of CAPPI (V) 0.5 km
7. spectrum width at an altitude of 0.5 km / CAPPI
(W) 0.5 km
8. standard deviation of CAPPI (W) 0.5 km
10. distance between AWS and radar
The study design is shown in Figure 2:
Figure 2: Conceptual diagram of the MLP based Machine
Learning
In order to furter evaluate the rainfall perfornance,
mean error (ME), mean absolute error (MAE), mean
square error (MSE), root mean square error (RMSE)
and accuracy is used.
Machine Learning System for Rainfall Estimates from Single Polarization Radar
45

𝑀𝐸
∑
𝑓
𝑜
(8)
𝑀𝐴𝐸
∑
|𝑓
𝑜
|
(9)
𝑀𝑆𝐸
∑
𝑓
𝑜
(10)
𝑅𝑀𝑆𝐸
√
𝑀𝑆𝐸
(11)
Description:
fi : Estimated rainfall from Radar/MLP
oi : rainfall from AWS
𝐴𝑐𝑐𝑢𝑟𝑎𝑐𝑦
( 1 2 )
Description:
- True positive (TP) = the number of cases
correctly identified as rain
- False positive (FP) = the number of cases
incorrectly identified as rain
- n= the total amount of data
4 RESULT
Multi-layer perceptron (MLP) is a type of
machine learning algorithm inspired by neuroscience
(Tan et al., 2017) This technique has been widely
applied in academia and industry such as computer
vision, machine translation, neural language
processing, and pattern recognition . The MLP
algorithm consists of most neurons that are attached
by interrelated weights (Hornik, Stinchcombe, &
White, 1989). In a neural network, there are 3 (three)
forming elements, namely (i) a set of connection lines
that have different weight sets, a positive value will
strengthen the signal while a negative value that
weakens the signal underneath. The number of
structure and relationship patterns will determine the
network architecture and network model; (ii) the sum
unit that determines the signal input multiplied by its
weight, for example input = x_1, x_2, x_3 ..........
x_m, connecting weight = w_1, w_2, w_3 ....... ....
w_m, sum ouput = u_j = x_1 w_1 + x_2 w_2 + x_3
w_3 ........... x_m w_m; (iii) an activation function that
determines whether signals from neural inputs are
forwarded to other neurons.
In this section will show the performance of MLP
in estimating rainfall. The data used in this model are
Radar and AWS data for 2017 and 2018 in Kulon-
Progo, Bantul, UGM and Sleman. Rainfall estimation
data from Radar and AWS are accumulated in 1 hour,
containing rain data and no-rain data. Z-R relation
used to estimate rain on radar in this study is the
Marshall-Palmer Z-R relation. The results of this
radar rainfall estimation will be compared with MLP
and evaluated.
There is a difference in the time of rainfall
calculation between AWS and Radar, where AWS
will calculate continuous rainfall continuously for 10
minutes, while the results of measurement of radar
rainfall estimation within 10 minutes there is a 4
minute pause to calculate the results of scanning some
elevations (scaning 6 minutes, calculation 4 minutes).
The estimated 10-minute rain from the radar / AWS
will be accumulated to 1 hour. In addition, the rainfall
measured by AWS is true rain falling to earth, while
Radar calculates estimates of rain falling to the
surface of the earth based on the results of scanning
the atmospheric conditions in certain layers
(depending on the product used).
Radar also has several limitations, one of which is
the optimal results of the radar scaning representation
when the object distance from the radar is far away.
This happens because the earth is round, so the farther
away the object is from the radar, the radar only gets
scaning at the top layer (Rauber, R.M and Nesbitt,
S.W, 2014)(Robert M. In this study, the distance
between AWS and Radar locations is used as input in
MLP.
Some of the above problems, require the approach
to improve outcome radar rainfall estimates. There
are 2 (two) classifications of rain estimation
techniques using radar, namely: Physical-based
techniques and statistical / engineering-based
techniques (Bringi, V. N. and Chandrasekar, V,
2001). Physical-based techniques are used to find the
relationship between radar observations and the
rainfall rate of observations, such as the use of the Z-
R equation equation that is appropriate in determining
rainfall estimates while statistical techniques using
algorithms such as machine learning models one of
which is MLP.
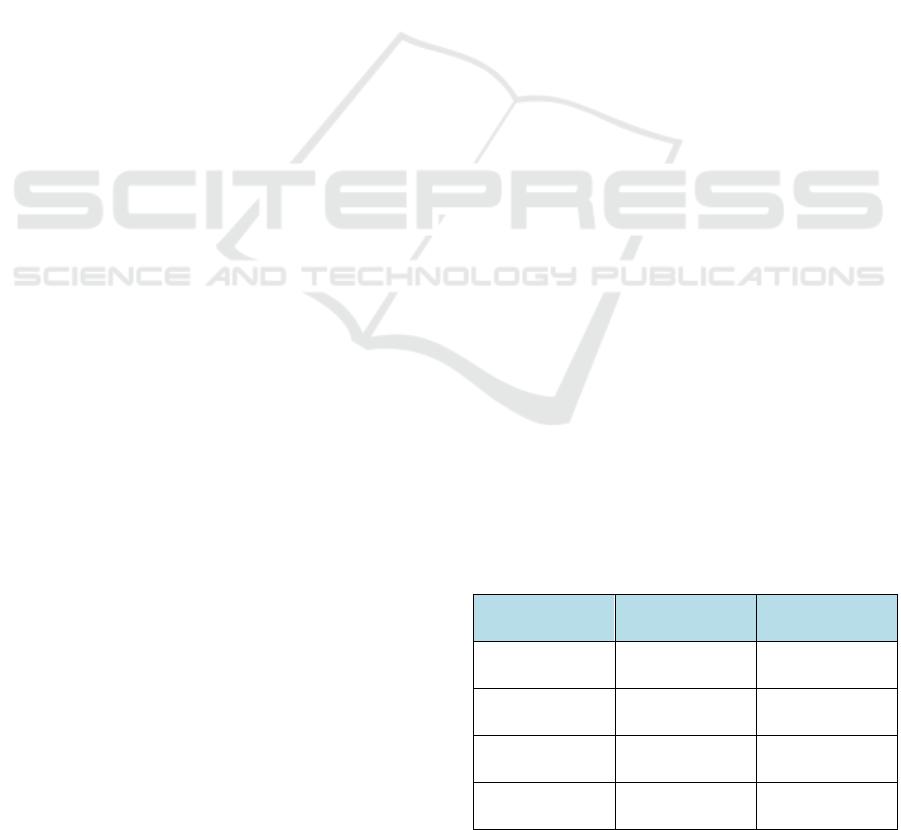
Figure 3 and Figure 4 show the results of the
distribution of data (scetterplot) between the results
of variations in the MLP model compared to AWS as
a rainfall observation / target model. The X-axis
displays the results of the observed rainfall from
AWS, while the Y-axis displays the results of the
MLP model rain estimation. Black dotted line shows
trend line / trend of MLP model. The sloping trend
line to the right shows a positive correlation /
correlation value, while the sloping tend line to the
left shows the negative correlation value / correlation.
Based on Figure 3, the MLP rainfall results are
compared with AWS data in 4 locations. The results
of estimation of rain using MLP can increase the
value of accuracy in detecting no-rain events to 79%.
The existence of a sloping trendline to the right
illustrates a positive correlation between estimated
MLP rain and rain from AWS data.
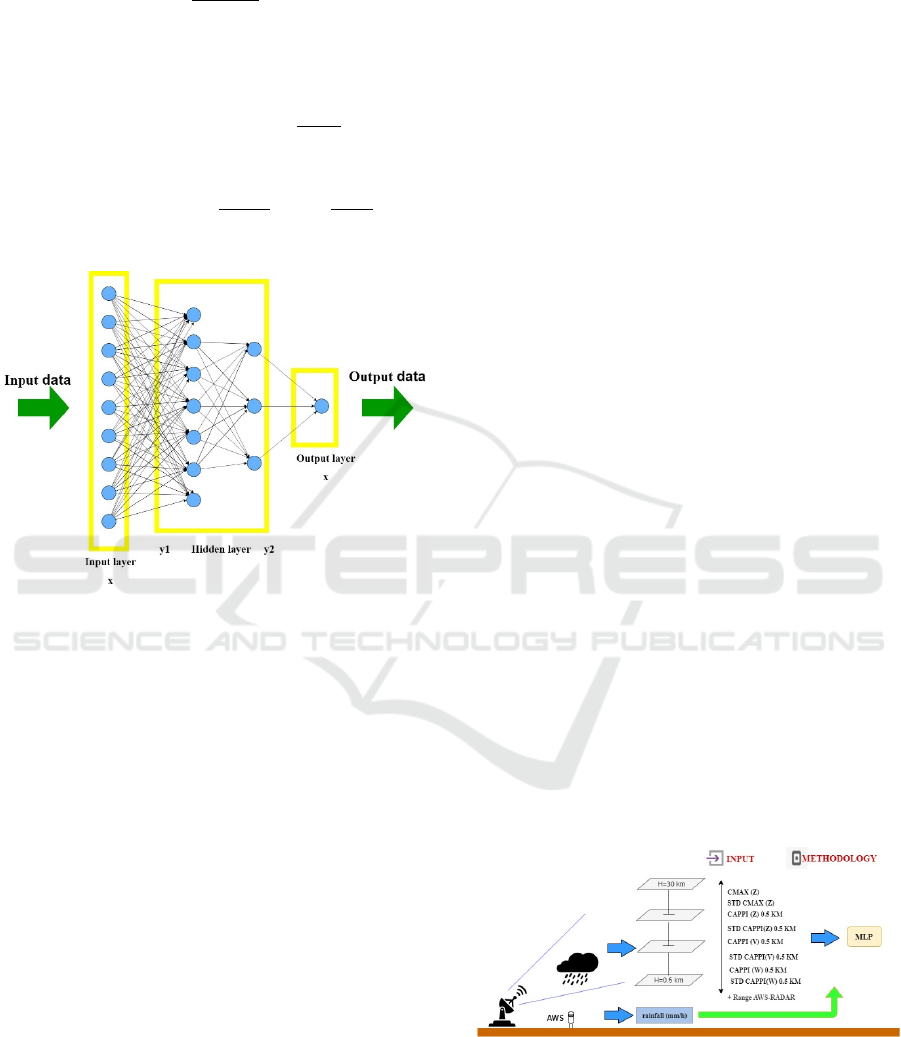
However, there are some occurrences of rain with
high intensity MLP unable to detect it. Figure 4 shows
CONRIST 2019 - International Conferences on Information System and Technology
46
the estimation of radar rain using the Z-R Marshall-
Palmer relation at 4 AWS locations. Based on Figure
4, radar rainfall estimates tend to underestimate
rainfall estimates, this can be seen from the
downward trend line..
Figure 3. Scatter plot of estimated MLP rainfall and AWS
rainfall
Figure 4. Scatter plot of estimated radar rainfall and AWS
rainfall
ME value of a model, used to determine the tendency
of the model in making estimates. The disadvantage
of using ME verfication is that one error can cover the
other's errors due to averaged error.
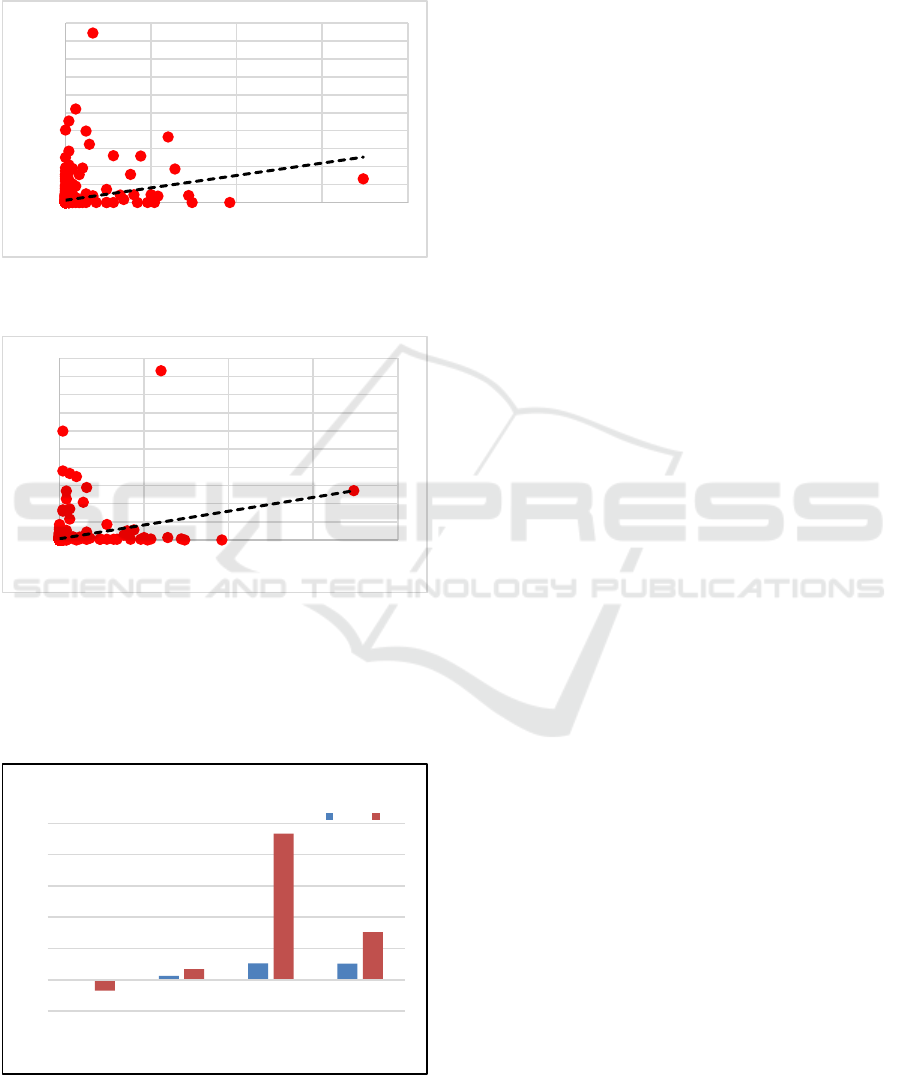
Figure 5. Comparison of MLP and Radar error values
Some relevant research methods use verification
methods to evaluate the results of models that have
been developed. An important aspect of the error
metric used for model evaluation is its ability to
distinguish between model results. A more
discriminating measure that results in higher variation
in model performance metrics among various sets of
model results is often more desirable. In this case,
MAEs may be influenced by a large number of
average error values without adequately reflecting
some large errors, RMSE is usually better at
expressing model performance differences, but many
researchers choose MAE over RMSE to present their
model evaluation statistics when evaluating the
results of the model (Chai & Draxler, 2014).
In measuring the performance of machine
learning models in this study, the model output will
be validated and verified, that is validating by
measuring the accuracy of the model in predicting the
occurrence and absence of rain and measuring the
accuracy of the model in predicting rain events
according to its category; while in verifying the
model, you will see the model error from the value of
mean error (ME), mean absolute error (MAE), mean
square error (MSE) and root mean square error
(RMSE). MAE is suitable for describing evenly
distributed errors, whereas for normally distributed
errors, RMSE is a better metric to present than MAE.
ME value, is a bias value that can measure the
tendency of the model in the form of underestimate if
it is negative or overestimate is positive, but ME has
a disadvantage because the error values can overlap.
The MSE value can be analogized as a variant plus
the bias squared of a model
Figure 5 shows the comparison of error values
between estimated Radar and MLP rain, the error
value closest to zero is MLP, ie with ME, MAE, MSE
and RMSE values of -0.02 mm / h, 0.25 mm / h, 1.05
mm / h and 1.03 mm / h, while the ME, MAE, MSE
and RMSE values of the radar rain estimate are -0.69
mm / h, 0.69 mm / h, 9.33 mm / h and 3.05 mm / h.
Based on the error value of the ME, MAE, MSE
and RMSE values of the MLP model shown in Figure
5, the MLP model error values compared with the
radar rainfall estimation results, the MLP model error
values are smaller than the radar error values. this
shows that the performance of the MLP model is
better than the results of the estimation of radar
rainforest and the MLP model is able to improve the
rainfall estimation results from the single polarization
radar data in Yogyajarta.
0
1
2
3
4
5
6
7
8
9
10
0 5 10 15 20
estimaterainfallfromMLP
rainfallintheground(mm/h)
0
5
10
15
20
25
30
35
40
45
50
0 5 10 15 20
estimaterainfallfromradar
rainfallintheground(mm/h)
‐0,02
0,25
1,05
1,03
‐0,69
0,69
9,33
3,05
‐2,00
0,00
2,00
4,00
6,00
8,00
10,00
ME MAE MSE RMSE
ComparisonofMLPandRadarerrors(mm/h)
MLP Radar
Machine Learning System for Rainfall Estimates from Single Polarization Radar
47

REFERENCES
A. Armoto, L. Fanucci, E.P. Scilingo and D.De Rossi.
(2011). Low-error digital hardware
implementation of artificial neuron activation
functions and their derivative. Microprocessors
and Microsystems, 557-567.
Adi, S. (2013). Characterization of flashflood disaster
in Indonesia. Jurnal Sains dan Teknologi
Indonesia , Vol.15 no 1.
Ali, A and Hidayati,S. (2016). Whirl Wind Detection
and Identification in Indonesia Utilizing Single
Polarization Doppler Weather Radar Volumetric
Data. The International Archives of the
Photogrammetry, Remote Sensing and Spatial
Information Sciences, Volume XLI-B8, 2016
XXIII ISPRS Congress.
Bock, S., & Weis, M. (2019). A Proof of Local
Convergence for the Adam Optimizer.
Proceedings of the International Joint Conference
on Neural Networks, 2019-July(July), 1–8.
https://doi.org/10.1109/IJCNN.2019.8852239
Bringi, V. N. and Chandrasekar, V. (2001). The
polarimetric basis for characterizing precipitation.
In: Polarimetric Doppler Weather Radar.
Cambridge University Press, Cambridge, pp.
378–533.
Chai, T., & Draxler, R. R. (2014). Root mean square
error (RMSE) or mean absolute error (MAE)? -
Arguments against avoiding RMSE in the
literature. Geoscientific Model Development,
7(3), 1247–1250. https://doi.org/10.5194/gmd-7-
1247-2014
Chandrasekar, V., Tan, H., and Chen, H. (2017). A
machine learning system for rainfall estimation
from spaceborne and ground radars. URSI GASS,
mONTREAL.
Codo, M., and Rico-Ramirez, M.A. (2018). Ensemble
Radar-Based Rainfall Forecasts for Urban
Hydrological Applications. Geosciences, Basel
Vol. 8, Iss. 8.
Germann, U., Galli, G. Boscacci, M., and Bolliger,
M. (2006). Radar precipitation measurement in a
mountainous region. Q. J. R. Meteorol. Soc, 132,
1669–1692.
Harrison,D.L., Driscoll,S.J., and Kitchen,M . (2000).
Improving precipitation estimates from weather
radar using quality control and correction
techniques. Meteorol. Appl., 2000, 7, 135–14.
Hornik, K., Stinchcombe, M., & White, H. (1989).
Multilayer feedforward networks are universal
approximators. Neural Networks, 2(5), 359–
366. https://doi.org/10.1016/0893-
6080(89)90020-8
Kingma, D. P., & Ba, J. L. (2015). Adam: A method
for stochastic optimization. 3rd International
Conference on Learning Representations, ICLR
2015 - Conference Track Proceedings, 1–15.
M. Marzuki, H. Hashiguchi, M. K. Yamamoto2, S.
Mori and M. D. Yamanaka. (2013). Regional
variability of raindrop size distribution over
Indonesia. Annales Geophysicae, 31, 1941–1948.
Minervino, A.C and Duarte, E.C. (2015). Loss and
damage affecting the public health sector and
society resulting from flooding and flash floods in
Brazil between 2010 and 2014 - based on data
from national and global information systems.
Ciência & Saúde Coletiva, 685-693.
Paul, S.H., Sharif, H.O., and Crawford, A.M.G.
(2018). Fatalities Caused by Hydrometeorological
Disasters in Texas. MDPI Basel , Vol. 8, Iss. 5.
Raghavan, s. (2003). Radar Meteorology.
Netherlands: Kluwer Academic Publishers.
Rauber, R.M and Nesbitt, S.W. (2014). Radar
Meteorology. LCCN 2017061104 (ebook) .
Rico-Ramirez, M.A., and Cluckie, I.D. (2007).
Bright-band detection from radar vertical
reflectivity profiles. Int. J. Remote Sens, 28, 4013–
4025.
Tan, H., Chandrasekar, V., & Chen, H. (2017). A
machine learning model for radar rainfall
estimation based on gauge observations. 2017
United States National Committee of URSI
National Radio Science Meeting, USNC-URSI
NRSM 2017, 1–2.
https://doi.org/10.1109/USNC-URSI-
NRSM.2017.7878317
Theodoridis, S., Koutroumbas, K., Koutroumbas, K.,
& Koutroumbas, K. . (2008). Pattern recognition.
Retrieved from http://ebookcentral.proquest.com
Created from indonesiau-ebooks on 2019-03-10
14:16:34.
Tjasyono, B.H.K., and Harijono, S.W.B. (2007).
Meteorologi Indonesia 2. . Jakarta: Badan
Meteorologi dan Geofisika.
Tsun-Hua, Y., Lei, F., and Lung-Yao, C., . (2016).
Improving radar estimates of rainfall using an
input subset of artificial neural networks. J. Appl.
Remote Sens, 10(2), 026013 doi: 10.1117/1.
JRS.10.026013.
Zhang, Z. (2019). Improved Adam Optimizer for
Deep Neural Networks. 2018 IEEE/ACM 26th
International Symposium on Quality of Service,
IWQoS 2018, 1–2.
https://doi.org/10.1109/IWQoS.2018.8624183
CONRIST 2019 - International Conferences on Information System and Technology
48
