
Analysis of Denoising Method and Study of Denoising Fusion
Optimization Algorithms for Industrial Gear Image
Dan Liu
1, 2, a
, Xiaogang Wang
1, 2
and Shuchuan Gan
1, 2
1
School of automation and information engineering, Sichuan university of science and engineering, Yibin, 643030, China
2
Artificial intelligence key laboratory of Sichuan,Yibin, 643030, China
Keywords: Industrial gear, Image processing, Filter method, Optimization algorithms.
Abstract: Aiming at the problem of noise filtering in the detection of industrial gear defects by machine vision
technology, this paper makes some analysis and study for industrial gear image. For the analysis of
denoising method, it uses the method of MATLAB numerical simulation to apply single noise (like Gauss
noise, salt and pepper noise, multiplicative noise) to gear image, and uses median filter, mean filter,
Gaussian smoothing filter and Wiener filter separately to filtering and compare the different filtering effects.
For the study of denoising fusion optimization, a neighborhood mean method based on extremum median
filter and a fusion filter method are proposed for the mixed noise. The simulation results show that the
median filtering is the best for salt and pepper noise, the smooth filtering and Wiener filtering are better for
Gauss noise and multiplicative noise, and the fusion filtering method with improved mean filtering is the
best for gear images with mixed noise.
1 INTRODUCTION
As the basic element of industry, gear is the most
basic and key component in manufacturing
equipment industry. Its precision directly affects the
working performance and service life of the machine,
so the quality inspection technology of gear has
become a focus of attention and research (
Yang, Y.H.
Yang, Y. and Yu C. B, 2018)
. In recent years, machine
vision technology has been widely used in defect
detecting of product and image recognition (
César, D.
Jónathan, H. and Pascual, V, 2017
; Ma, Y. Jiang, Q. 2018),
the technical scheme is mature, which improvs the
quality and the flexibility of industrial production.
Therefore, it can also be applied to the real-time
monitoring of industrial gear (
Wu, Q. Gu, J.N. and
Zhang, P.L, 2017
; Yin, H.M, 2017).
The defect detecting of gear based on image
recognition mainly includes image preprocessing
(filtering and enhancement) (
Dong, C.Z. Ye, X.W. and
Jin, T, 2017), edge inspection (Peng, H. Zhao, P.B,
2017), target extraction (Shan, Z.W, 2017), region
segmentation and defect feature extraction (
Cui, J.H.
Zhao, W.X. and Wang, X.Z, 2009). Among them filter
regards primary job, its importance is self-evident.
For the detection of engine defects, Xiao Jing
proposed wavelet transform can be applied to image
denoising (
Xiao, J. You, S.H, 2018), and the effect was
greatly improved compared with the median filtering.
For the needs of image processing, Bi Siwen
proposed an image denoising algorithm based on
double tree complex wavelet transform. Compared
with other methods (
Bi, S. Chen, W.H. and Shuai, T. et
al, 2019), the PSNR of the denoised image was
improved 0.2dB. In the sonar detection image of
submarine pipeline, it is easy to be influenced by the
external environment. On the basis of wavelet, Liu
Xiaojuan et al. proposed an ultra-wavelet ridged
wave transform with the function of maintaining
linear features such as obvious edges (
Zhang, X.J. Liu,
Z. and Yang, X. et al, 2017)
. For the industrial gear, its
image mainly includes the noise of itself, the
electronic noise generated by the high-speed camera,
and the quantization noise of the digital image.
Among them, the noise of itself is mainly affected
by the environment, such as light and air quality.
The noise can be controlled and can be ignored due
to the small error. Digital image noise is generated
in the process of digital sampling of the original
image and it is inevitable. For the electronic noise
produced by high-speed camera, it cannot be ignored
and is the most important factor affecting the gear
image. Gear image noise can be divided into
244
Liu, D., Wang, X. and Gan, S.
Analysis of Denoising Method and Study of Denoising Fusion Optimization Algorithms for Industrial Gear Image.
DOI: 10.5220/0008873502440250
In Proceedings of 5th International Conference on Vehicle, Mechanical and Electrical Engineering (ICVMEE 2019), pages 244-250
ISBN: 978-989-758-412-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
gaussian noise, salt-pepper noise and multiplicative
noise. Because of that each noise has its own
characteristics, so different filtering methods are
required (Li, J. Deng, F. and Chen, J, 2018; Erkan, U.
Gökrem, L. and Enginoğlu, S, 2018).
In order to get better image preprocessing effect,
the MATLAB is used to simulate calculation (
Li,
X.M. Zhang, Q.W. and Ying, G.Z, 2012), the noises in
gear images are filtered by various methods, and the
best filtering method of each noise is obtained.
Finally, the best filtering method to a mixture of
gaussian noise and multiplicative noise of the gear
image is obtained.
2 FILTERING ANALYSIS
Assuming that industrial gear images mainly
includes gaussian noise, salt-pepper noise and
multiplicative noise. Median filter, mean filter,
gaussian smooth filter and two-dimensional adaptive
wiener filter are proposed to filter the above noises
respectively, and the optimal filtering method of
each noise can be obtained.
2.1 Gaussian Noise
Gaussian noise in industrial gear images mainly
comes from the electronic noise generated by high-
speed cameras. Due to the extremely short exposure
time and sufficient light in the real-time monitoring
process of gears, the noise of high-speed cameras
conforms to the characteristics of gaussian noise.
Gaussian noise can be expressed by probability
density function.
22
1
() exp[( )/2 ]
2
px x u
(1)
x
is pixel value,
u
is the average of image gray
value,
2
is the standard deviation of pixel value, is
the variance of pixel value. In the Matlab program,
the density of gaussian noise depends on the formula
2
(, )Gu
. For each input pixel value, a normal
gaussian sampling distribution formula can be used
to obtain the output pixel value.
2
+()P x uMeans G d
(2)
d
is a linear random number and
()Gd
is the
gaussian random value of the random number. The
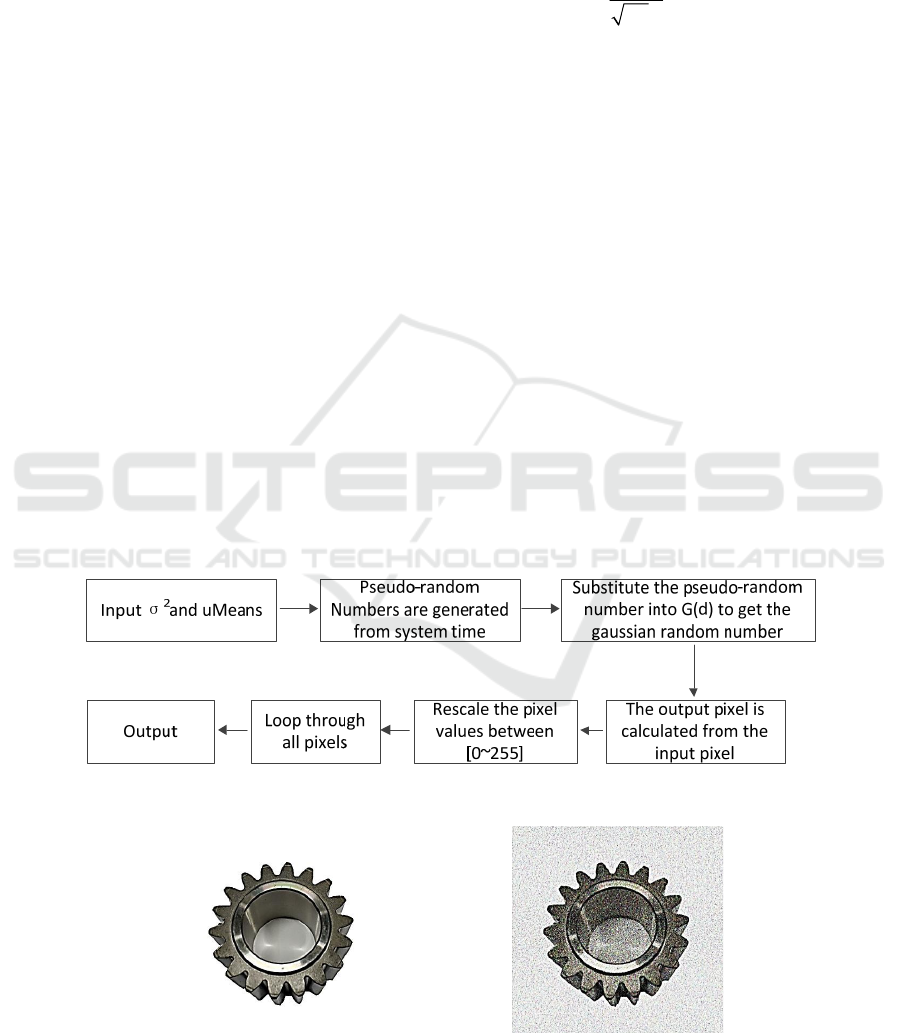
sequence of adding gaussian noise to the gear image
is shown in Fig.1.
According to the process in Fig.1, gaussian noise
is adding to the original gear image in Matlab, where
the
u
is 0 and the
2
is 0.05. The results are shown
in Fig.2, where Fig.2 (a) is the actual image of the
industrial gear and Fig.2 (b) is the image after
gaussian noise is applied.
Figure 1. Sequence of adding gaussian noise.
Figure 2(a). Original gear image. Figure 2(b). Adding gaussian noise.
Analysis of Denoising Method and Study of Denoising Fusion Optimization Algorithms for Industrial Gear Image
245
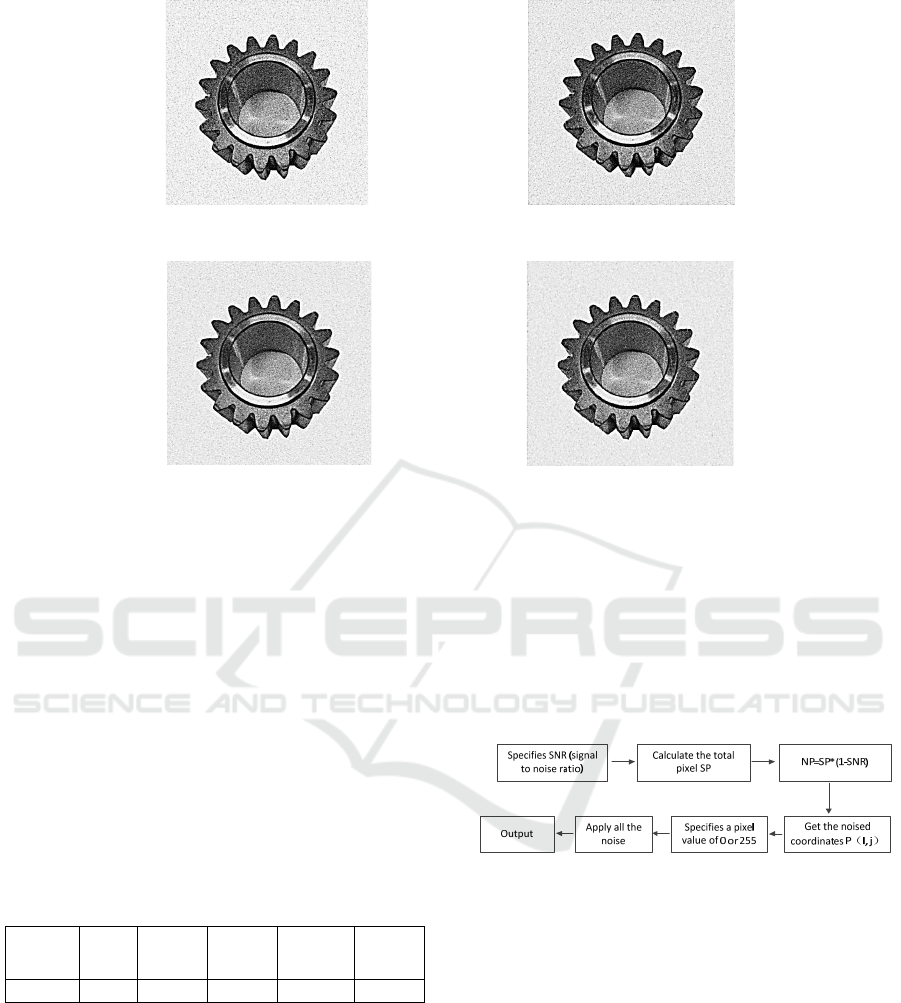
Figure 3(a). Median filtering. Figure 3(b). Mean filtering.
Figure 3(c). Gaussian smooth filtering. Figure 3(d). Wiener filtering
As shown in Figure 2(b), gaussian noise is a
color noise. Median filter, mean filter, gaussian
smooth filter and two-dimensional adaptive wiener
filter are respectively performed on the gear images.
The filtering result of each method is shown in
Figure.3.
As shown in Fig.3, there is little difference in
subjective evaluation of gaussian noise. From the
perspective of objective evaluation, peak-signal-to-
noise-ratio (PSNR) is proposed to carry out full
reference evaluation in order to clarify the
advantages and disadvantages of each filtering
method. The PSNR values of each method are
shown in Table 1.
Table 1. Evaluation index of image filtering with
gaussian noise.
Methods Noise
image
Median
filtering
Mean
filtering
Gaussian
smooth
filtering
Wiener
filtering
PSNR
21.71 31.39 32.114 32.987 34.46
It can be seen from Table 1 that PSNR value of
gear image with noise is 21.715dB.The PSNR values
after median, mean and gaussian smoothing filter are
all around 32dB.The image quality after wiener
filtering is obviously better than the other three
methods. The PSNR values of images filtered by
each method are: wiener filter>aussian smooth
filter>mean filter>median filter, so the best method
to filter gaussian noise is wiener filter.
2.2 Salt-pepper noise
The salt-pepper noise may be produced in the
process of high-speed photography and digital image
quantization. Salt-pepper noise is a random
occurrence of white or black dots. The sequence of
adding salt-pepper noise in the digital image is
shown in Fig.4.
Figure 4. Sequence of adding salt-pepper noise in gears
image.
In MATLAB, salt-pepper noise is adding to gear
image, where SNR is 0.05. Fig.5 is the gear image
with salt-pepper noise.
As shown in Fig.5, black or white dots appear in
the image after noise is added, which conforms to
the characteristics of salt-pepper noise. Median filter,
mean filter, gaussian smooth filter and two-
dimensional adaptive wiener filter were applied to
the gear images. The filtering effect of each method
is shown in Fig.6.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
246

Figure 5. Adding salt-pepper noise.
Figure 6(a). Median
filtering.
Figure 6(b). Mean filtering.
Figure 6(c). Gaussian
smooth filtering.
Figure 6(d). Wiener filterin.
As shown in Fig.6, for the salt-pepper noise in
gear image, the median filter has the best effect and
basically eliminates the black and white noise.
Among other filtering methods, the gaussian smooth
filter is better than wiener filter and mean filter, but
the filtering effect cannot be compared with the
median filter. It is difficult to meet the requirements
of image post processing. The reason is that in the
process of median filtering, the value of each
position in the filtering matrix is replaced by the
median value, while the pixel value of the black
point is 0 and the white point is 255, which belongs
to the extreme value at both ends of the pixel. When
the median value is taken, it can be basically
eliminated, so that the filtering effect is better.
Therefore, median filter should be used to
preprocess industrial gear images with salt-pepper
noise.
2.3 Multiplying Noise
Assuming that the pixel of the gear image is
(, )
f
ij
and the pixel of the noise is
(, )hi j
, then both
gaussian noise and salt-pepper noise belong to
additive noise, the total pixel of the noise-containing
image is
(, ) (, )
f
ij hij
. If the total pixel value of
the image is
(, ) (, )
f
ij hij
, the noise is
multiplicative noise. The multiplicative noise is
closely related to signal of gear image. It varies with
the intensity of the image signal. For the industrial
gear image, in the process of image acquisition and
image digitization, there will be some multiplicative
noise due to the camera particle noise and other
reasons. Fig.7 shows the superposition of
multiplicative noise in the original image.
Figure 7. Adding multiplicative noise.
As shown in Fig.7, compared with gaussian
noise and salt-pepper noise, multiplicative noise is
more densely distributed and has a greater impact on
the image. Median filtering, mean filtering, gaussian
smoothing filtering, and two-dimensional adaptive
wiener filtering were performed on the gear images.
The filtering effect of each method is shown in Fig.8.
Figure 8(a). Median
filtering.
Figure 8(b). Mean
filtering.
Figure 8(c). Gaussian
smooth filtering.
Figure 8(d). Wiener
filtering.
Analysis of Denoising Method and Study of Denoising Fusion Optimization Algorithms for Industrial Gear Image
247
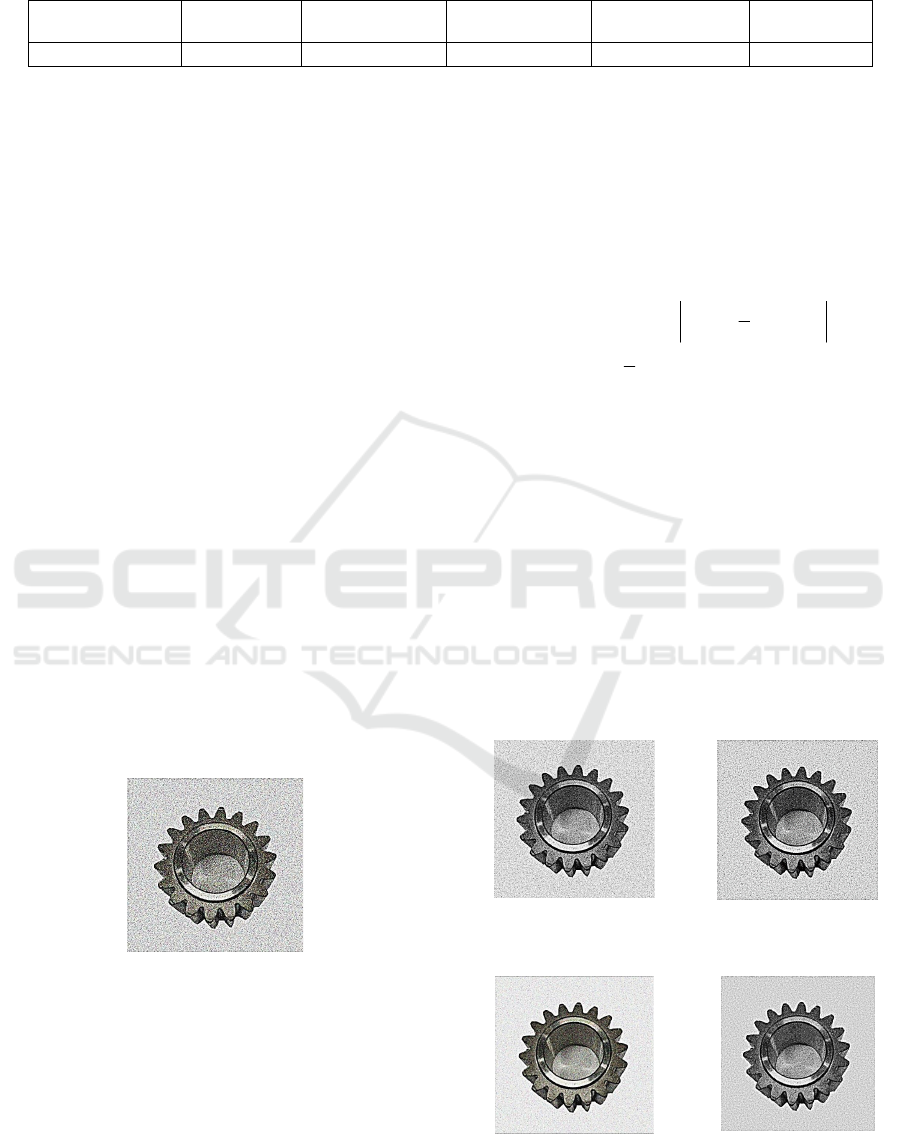
Table 2. Evaluation index of image filtering with gaussian noise.
Methods Noise image Median filtering Mean filtering
Gaussian smooth
filtering
Wiener
filtering
PSNR 24.32 32.835 33.008 33.752 36.813
Similar to gaussian noise, the above four filtering
methods have little difference in subjective
evaluation. In terms of objective evaluation, PSNR
was used for full reference evaluation. The PSNR
values of each method are shown in Table 2.
It can be seen from Table 2 that the PSNR values
of images with multiplicative noise are all around
33dB after the median, mean and gaussian
smoothing filtering. However, the wiener filtering is
obviously better than the other three methods, and
the peak-signal-to-noise-ratio after denoising is
36.813dB.
From what has been discussed above, wiener
filter has the best effect among all kinds of noise
filtering methods for gear image. It is suitable for
gaussian noise and multiplicative noise. For salt-
pepper noise, the median filter should be selected.
3 OPTIMIZED FILTERING
After median filtering, the quality of gear image
with salt-pepper noise basically meets the
requirements of image post-processing. Therefore,
salt-pepper noise is no longer considered in the
fusion noise, and gaussian noise and multiplicative
noise are mainly superimposed. As shown in Fig.9,
gaussian noise and multiplicative noise are
superimposed on the original image.
Figure 9. Gear image with gaussian noise and
multiplicative noise.
3.1 Improved Mean Filtering
When filtering the gear image with fusion noise, the
conventional filtering method is that all pixels are
processed in the same way, but the filtering effect is
poor. Based on the idea of extreme median filtering,
the mean filtering can be improved and get the
neighborhood mean method of domain value based
on extreme median filtering. The basic idea is: select
a pixel of the gear image, if the difference between
its gray value and the average gray value of its
neighborhood is greater than the given maximum
value M(or less than the given minimum value N),
then the average gray value of its neighborhood can
be used to replace. The expression is as follows:
,
,
1
(, ), (, ) ( , )
(, )
1
(,) else
mn C
mn C
f
xy N f xy f mn M
T
fxy
fmn
T
,
(3)
(, )
f
xy
is the gray value of the original image
containing
SS
pixels, and
(, )
f
xy
is the gray
value of the processed image, x, y=0,1,2...S-1, C is
the set of coordinates in the neighborhood of the
(x,y), but it doesn't include the point (x,y), T is the
total number of coordinate points in the set.
3.2 Composite Filtering
The gear images with fusion noise (gaussian noise
and multiplicative noise) are filtered by the above
four methods separately, and the filtering effect of
each method is shown in Fig.10.
Figure 10(a). Median
filtering.
Figure 10(b). Mean
filtering.
Figure 10(c). Gaussian
smooth filtering.
Figure 10(d). Wiener
filtering.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
248
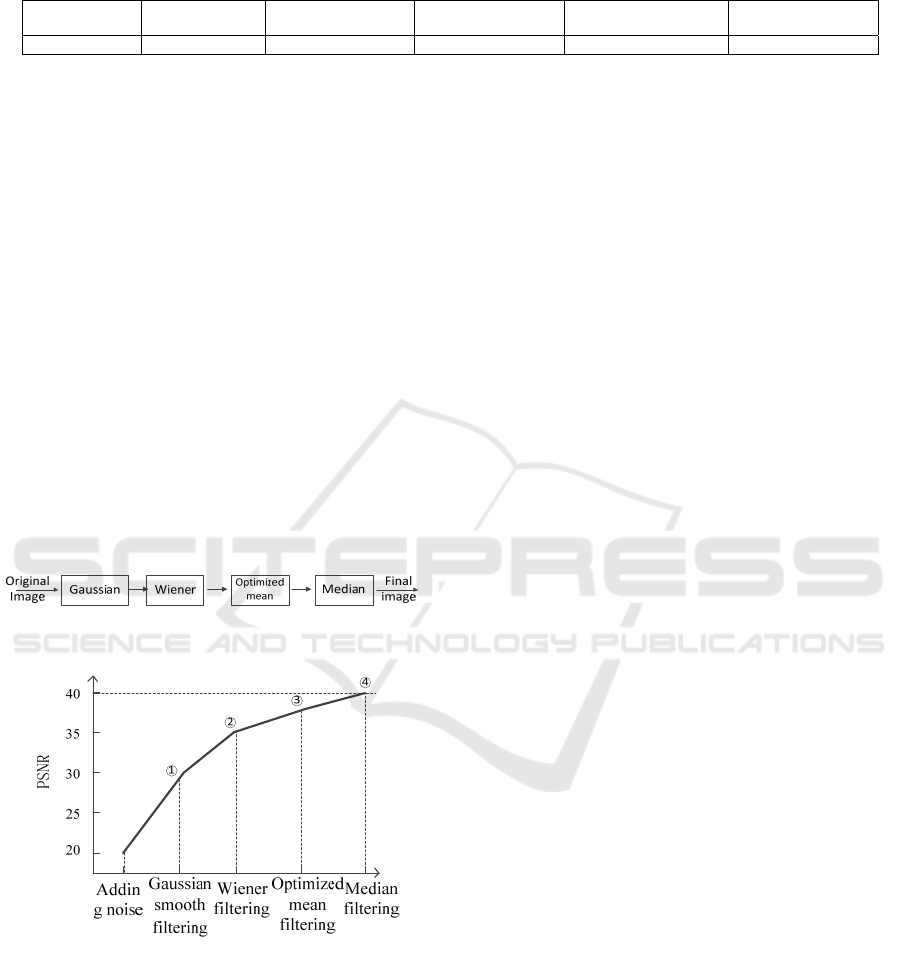
Table 3. Filtering evaluation indicators for images with multiplicative noise.
Methods Noise image Median filtering Mean filtering
Gaussian smooth
filtering
Wiener filtering
PSNR 20.32 29.530 29.688 32.091 31.715
As shown in Fig.10, median filtering and mean
filtering are poor. PSNR is still used for full
reference evaluation in objective evaluation to
characterize the effect of each filtering method. The
PSNR values of each method are shown in Table 3.
It can be seen from Table 3 that after median
filtering or mean filtering, the PSNR value of the
noise image is about 29dB. However, the image
quality after wiener filtering or gaussian smooth
filtering is relatively good, and PSNR is 32dB, with
better filtering effect.
In order to get the best filtering effect, multi-
method superposition filtering is performed on the
gear image on the basis of single filtering. As shown
in figure 11, the original image is firstly processed
by gaussian smooth filtering, then the secondary
image is processed by wiener filtering, next the
above improved mean filtering is performed, and
finally the fourth image is processed by median
filtering. Fig 12 shows the change of PSNR value of
the original image after each filtering method.
Figure 11. Sequence of fusion filtering.
Figure 12. Multiple filtering of the fusion model.
As shown in Fig.12, after median filtering and
mean filtering, the noise in the gear image basically
disappears. And PSNR value of the image is
basically equal to the original image, with good
filtering effect. It can be seen from the slope of
broken line, the gaussian filter has the highest slope
and the best filtering effect. After gaussian filtering
and wiener filtering, most of the image noise
disappears, which is consistent with the conclusion
in Table 3.
4 CONCLUSIONS
In order to describe all kinds of noise that may be
encountered in the process of industrial gear image
processing, single noise model and the fusion noise
are analyzed respectively. The following
conclusions are as follows: firstly, the median filter
method should be used to remove the salt-pepper
noise in the gear image, the result is obviously,
which can basically remove all the noise. Secondly,
for gaussian noise and multiplicative noise, the
effect of each filtering method is little different,
which can filter noise to some extent, the two-
dimensional adaptive wiener filtering method is little
better. For the fusion noise, when there are three
kinds of noise in the image, the salt- pepper noise
can be filtered out by the median filtering, gaussian
smoothing and Wiener filtering are used to filter out
the remaining Gaussian noise and multiplicative
noise. Finally, on the basis of the existing filtering
methods, a new filtering method is proposed for gear
image noise, and the filtering effect is obvious.
ACKNOWLEDGEMENTS
This work is supported by the Foundation of
Sichuan Educational Committee of China (Grant
No.18ZA0357), Sichuan Science and Technology
Program of China(Grant No.2018JY0197,
2016SZ0074), Foundation of Artificial Intelligence
Key Laboratory of Sichuan Province (2017RZJ02),
Nature Science Foundation of Sichuan University of
Science &Engineering (No. 2017RCL12), and
Foundation of Deyang Open School-City
Cooperative Technology Research and Development
(Grant No. 2018CKJSD017).
REFERENCES
Bi, S. Chen, W.H. and Shuai, T. et al(2019),”An Image
Denoising Algorithm Based on Doubletree Complex
Analysis of Denoising Method and Study of Denoising Fusion Optimization Algorithms for Industrial Gear Image
249

Wavelet Transform”, radio engineering, vol.49 No.1 ,
pp.27-31.
Cui, J.H. Zhao, W.X. and Wang, X.Z. (2009),”Research of
Image Feature Extraction”, Journal of Hebei
University (Natural Science Edition), vol. 29 No.1,
pp.106-112.
César, D. Jónathan, H. and Pascual, V. (2017), “IJ-
OpenCV: Combining ImageJ and OpenCV for
processing images in biomedicine”, Computers in
Biology and Medicine, vol.84, pp.189-194.
Dong, C.Z. Ye, X.W. and Jin, T. (2017), “Identification of
Structural Dynamic Characteristics Based on Machine
Vision Technology”, Measurment, vol S0263-2241 No.
17, pp. 30615-2.
Erkan, U. Gökrem, L. and Enginoğlu, S. (2018),”
Different applied median filter in salt and pepper
noise”, Computers & Electrical Engineering, vol.70,
pp.789-798.
Li, J. Deng, F. and Chen, J. (2018),” A Fast Distributed
Variational Bayesian Filtering for Multisensor LTV
System With Non-Gaussian Noise”, IEEE
Transactions on Cybernetics, pp (99).1-13.
Li, X.M. Zhang, Q.W. and Ying, G.Z.(2012),”A Matlab -
based Visual System Design for Image
Denoising”,Journal of Hangzhou Normal University
(Natural Science Edition), vol.11 No. 6, pp.551-555.
Ma, Y. Jiang, Q. (2018), “A robust and high-precision
automatic reading algorithm of pointer meters based
on machine vision”, Measurement Science and
Technology, vol.015401, pp.
Peng, H. Zhao, P.B. (2017),”Improved Mean Filtering
Algorithm in Edge Detection”, Computer Engineering,
vol.43 No. 10, pp.172-178.
Shan, Z.W. (2017), “Research of Gear Image Boundary
Extraction Algorithm Based on Machine Vision
Measurement”, Shengyang University of Engineering.
Wu, Q. Gu, J.N. and Zhang, P.L. (2017), “Research on
Spur Gear Recognition Technology Based on Image
Processing”, Tool technology, 6.
Xiao, J. You, S.H. (2018), “Denoising Method of Engine
Surface Defect Image Based on Wavelet Transform”,
Surface Technology, vol.47 No. 12, pp.328-333.
Yang, Y.H. Yang, Y. and Yu C. B. (2018),”Research and
Application of SURF and Gray Difference in
Detection of Small Modulus Plastic Gear Defect”,
Mechanical transmission, vol.257 No.5, pp.162-166.
Yin, H.M. (2017),” Research on Gear Detection and
Measurement System Based on Machine Vision”,
Liaocheng University.
Zhang, X.J. Liu, Z. and Yang, X. et al (2017),” Research
on the Method of Sonar Seabed Pipeline Image
Denoising”, Journal of Ocean Technology.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
250
