
Event-triggered Observers-based Output Feedback H∞ Control for
Linear Time-invariant Systems with Quantization
Yuecheng Huang
1, a
and Dongbing Tong
1, b
1
College of Electronic and Electrical Engineering, Shanghai University of Engineering Science, Shanghai 201620, China
2
College of Electronic and Electrical Engineering, Shanghai University of Engineering Science, Shanghai 201620, China
Keywords: Time-invariant linear systems, H∞ control, event-triggered mechanism, quantization, observer, periodical
sampling.
Abstract: This paper is concerned with the H∞ output feedback control for linear time-invariant (LTI) systems with
the quantization to realize the operation optimization of a microgrid (MG). Meanwhile, a novel event-
triggered mechanism is introduced to reduce the number of control signals. Furthermore, a model of
observer which is based on the event-triggered mechanism is proposed to verify the synchronization of LTI
systems. Based on this model, a criteria which is derived from linear matrix inequalities (LMIs) is provided
such that the system performance can be ensured. Finally, a numerical example is presented to illustrate the
effectiveness of the results.
1 INTRODUCTION
With the increase in power demand and the shortage
of fossil fuels, the renewable energy (RES) and
batteries are combined to achieve power generation.
The combination which contains RES and batteries,
is called as the microgrid (MG). The MG can realize
the flexible application of the distributed power and
solve the problem of massive loads. However, the
performance of the MG can be disturbed by many
factors. Decisive factors for the stable operation of
the MG are power outputs, loads and prices. In
addition, many factors are uncertain, such as the
weather, the peak electricity consumption and
random events. These uncertainties can affect the
performance of the MG. Thus, the optimal
scheduling can’t be obtained to achieve the
economic operation. According to the literature (A.
D. Dominguez-Garcia, 2009), the model of the MG
can be transformed into LTI systems (C. A. Desoer,
1968) which are used to study the problem with
uncertainties. Thus, LTI systems are used in this
paper to analyze the performance of the MG.
Although LTI systems have been introduced to
measure the operation state of the MG, the data,
which is inside the system, is difficult to be
accurately measured due to the complexity in the
MG. Thus, the observer is proposed to solve the
difficulty of measuring the internal data. Nowadays,
observers-based LTI systems have been studied
extensively in different fields, such as the digital
image processing (J. Alonsomontesinos, 2015) and
the electric automatization (G. Bertotti, 1991). Due
to the greatly potential effect in analyzing the
internal data, some preliminary results have been
reported. For instance, the problem of the observers-
based circuit is studied by linear matrix inequalities
(LMIs) in literature (A. D. Dominguez-Garcia,
2009). After that, many literatures, which study the
state estimation by LMIs, have been proposed, such
as the state estimation with mixed interval time-
varying delays (F. Perez-Gonzalez, 2008), (Z. M.
Zhang, 2019), the fault detection and isolate for
observers-based linear systems (S.Hajshirmohamadi,
2016) and so on. Consequently, the observer is of
great value to investigate the internal working
principle.
In actual circuit measurements, the real-time
scheduling can not be achieved due to uncertainties.
In this paper, an event-triggered mechanism is
provided to filter uncertainties in order to obtain
appropriate current signals. The event-triggered
mechanism is executed when the predefined event
occurs. Current signals, which are not satisfied the
predefined event, will be filtered. Thus, an effective
method is provided to disperse the execution of tasks,
namely the event-triggered mechanism only works
Huang, Y. and Tong, D.
Event-triggered Observers-based Output Feedback H Control for Linear Time-invariant Systems with Quantization.
DOI: 10.5220/0008855603670372
In Proceedings of 5th International Conference on Vehicle, Mechanical and Electrical Engineering (ICVMEE 2019), pages 367-372
ISBN: 978-989-758-412-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
367

when specific events occur. Despite the event-
triggered mechanism has an irreplaceable role in
allocating resource, its internal state in the MG is
difficult to be measured. Thus, in this paper, the
internal state of the MG with the event-triggered
control can be measured by the measurement error.
The structure of this paper is as follows. First,
the LTI system is presented to describe the MG.
Second, the transmission signal is quantized and the
observed model which is based on the event-
triggered mechanism and the quantification is
designed. At last, an example of simulation is given
to verify the effectiveness of the proposed method.
The main contributions are emphasized in the
following three parts.
(1) The variable parameter in the event-triggered
mechanism is changed to compare the triggered
probability of the mechanism. Meanwhile, the
appropriate parameter is selected to reduce the
bandwidth.
(2) A new analytical method which contains the
event-triggered mechanism and the LTI system, is
presented to analyze the stability of the MG.
(3) The influence of external interference on the
performance is reduced by using H∞ index.
2 MODEL DESCRIPTION AND
PROBLEM STATEMENT
2.1 Model Description
According to the literature (A. D. Dominguez-
Garcia, 2009), the state-space representation of the
MG can be indicated as
(1)
Where , represent the current and the
voltage respectively, indicates the resistor and
is the inductance.
Considering the disturbance and the output in the
MG, let is the state vector,
is control input vector and ,
are known constant matrices with appropriate
dimensions. Then, the following equation can be
obtained as
(2)
Where is the output, is
the disturbance, and are known constant
matrices with appropriate dimensions.
2.2 Event-Triggered Mechanism
The event-triggered mechanism is proposed as
(3)
Where , , is the sampling time
with , is the triggered time, is a
positive definite matrix and is a given
scalar.
In the whole model frame, the sensor receives
the state vector from the LTI system as and
exports the output vector . Then, is sampled
as by periodical sampling. In every sampling
period, the event-triggered mechanism judges that
the output satisfies the mechanism (3) or not.
If the mechanism (3) holds, the date is
immediately transformed into the controller with the
time delay , and .
However, the introduction of may lead to that
the signals have different orders of arrival to the
controller. Inspired by [12]-[13], the time intervals
are elaborated in the following content.
(4)
Where and .
During the range , is
defined as
( ) 1
( ) ( ),
di t Y
i t v t
dt L L
()it
()vt
Y
L
( ) ( )
n
x t i t R
( ) ( )
m
u t v t R
Y
A
L
1
B
L
( ) ( ) ( ) ( ),
( ) ( ),
x t Ax t Bu t B t
y t Cx t
()
q
y t R
2
( ) [0, )tL
C
B
1
min | ( ( ) ( ))
( ( ) ( ))
( ) ( ) ,
{
}
T
k k k k
i
kk
T
kk
t h t h ih y t h y t h ih
H y t h y t h ih
y t h Hy t h
iZ
hR
k
th
kZ
()
k
y t h
H
[0,1)
()xt
()yt
()yt
()y kh
()y kh
()
k
y t h
k
(0, ]
k
0
k
11
1
1
1
, [ , )
{ [ ,
)}
[ ,
[)
M
k k k k k k k
d
ik
k
k M k
t h t h t h t h h
t h ih
t h ih h
t h d h t h
1
),
k
M
dZ
1
M
di
11
, )[
k k k k
t h t h
()t
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
368

(5)
Here we define that , where is the
upper delay bound of Meanwhile, the error
state between and can be
expressed as
(6)
According to (4)-(6), the event-triggered
mechanism (3) can be indicated as
(7)
Where .
2.3 Event-Triggered Quantized
Control Problem
The controller of event-triggered H∞ with
quantization in this paper is designed as
(8)
Where is a controller gain matrix with
appropriate dimensions.
The LTI system (2) is indicated as
(9)
In this paper, the quantizer
assumed to be
symmetric is introduced in this paper, where
. For each , the set of
quantized levels has the following form
, where
.
The quantizer is defined as
(10)
Where and the is the
quantization density.
Based on the literature [8], a sector bound
condition is proposed by
(11)
Where and
.
Thus, the quantized triggered output can be
indicated as
(12)
According to the literature [9], the observer can
be constructed as
(13)
Where is estimated state vector, is
estimated output vector, and is the observer gain
matrix.
Combining (9), (12) and (13), the error system
can be confirmed as
(14)
Where .
Definition 1. The system (14) with an H∞
disturbance attenuation level needs to satisfy
the following two conditions to be asymptotic
stability. The system (14) is asymptotically stable
with . And under the zero initial condition,
(14) with any nonzero should satisfy
.
Lemma 1. (A. Seuret, 2013) (Wirtinger
inequality) for the given matrix , the inequality
can be obtained when
1
1
11
, [ , )
, { [ ,
()
)}
. [ , )
M
k k k k
d
k i k
k
k M k M k k
t t h t t h t h h
t t h ih t t h ih
t
t h ih h
t t h d h t t h d h t h
m
h
m
( ).t
()
k
et
()
k
y t h
()
k
y t h ih
1
1
0, [ , )
( ) ( ), { [ ,
( ) )}
( ) ( ). [ ,
M
k k k
d
k k i k
kk
k k M k M
t t h t h h
y t h y t h ih t t h ih
e t t h ih h
y t h y t h d h t t h d h
11
)
kk
th
( ) ( ) ( ( )) ( ( )),
TT
kk
e t He t y t t Hy t t
11
),[
k k k k
t t h t h
( ) ( )u t Ky t
K
( ) ( ) ( ( )) ( ) ( )
( ) ( ),
k
x t Ax t BKy t t BKe t B t
y t Cx t
1 1 2 2
( ) [ ( ), ( ), ., ( )]
T
i i n n
q y q y q y q y
( ) ( )
i i i i
q y q y
()
ii
qy
S
0
{ , , 0, } {0}
i
i i o
S v v v v i Z
01
()
ii
qy
11
, if , 0,
11
( ) 0, if 0,
( ), if 0,
i i i i i
qi qi
i i i
i i i
u v y v y
q y y
q y y
1
(0 1)
1
qi
( ) ( ) ,
i
q y I y
1 2 n
diag{ , , , }
[ , ]
qi qi
()
k
y t h
( ) ( ) ( ).
kk
y t h I y t h
ˆ ˆ ˆ
( ) ( ) ( ( ) ( )),
ˆ ˆ
( ) ( ),
x t Ax t M y t y t
y t Cx t
ˆ
()xt
ˆ
()yt
M
( ) ( ) ( ) ( ) ( ( ))
( ) ( ) ( ),
k
e t A MC e t M BK y t t
M BK e t B t
ˆ
( ) ( ) ( )e t x t x t
0
( ) 0t
2
( ) [0, )tL
2
22
( ) ( )y t t
G
[ , ]x c d
Event-triggered Observers-based Output Feedback H Control for Linear Time-invariant Systems with Quantization
369

Where
3 MAIN RESULT
In this section, we consider the observers-based
quantized H∞ control of LTI systems under the
event-triggered mechanism. Based on LMIs and the
Lyapunov function, sufficient conditions are given
for the error system (14) to be asymptotic stability
with H∞ performance level γ.
3.1 Theorem
For given parameters , the error system (14)
is asymptotic stability if there exist matrices
and satisfying the
following inequality:
(15)
Where
,
,
Then, the error system (14) is asymptotic
stability with the H∞ inhibition of index γ.
3.2 Proof
Construct the following Lyapunov function as
(16)
By using Lemma 1, one has
(17)
Then, under the zero initial condition, we have
(18)
Where .
By using the Lyapunov-Krasovskii functional
candidate in (16), it follows
(19)
Where
1
( ) ( ) ( ( ) ( )) ( ( ) ( ))
3
,
T
c
T
T
d
x q Gx q dq x d x c G x d x c
dc
G
dc
2
( ) ( ) ( ) .
d
c
x c x d x q dq
dc
(0,1]
0, 0, 0P Q R
0H
11 16 17
66 67 68
77 78
88
26
8 2 6 6
4
00
0 0 0
0 0 0 0
0
0 0 0 0
0
6
1
=
0
2
1
0
2
mm
m m m m
mm
m
m
R R PB
R R R R
Q R R
R
R
11
( ) ( )
4
( ) ( ) ,
T
T
m
m
P A MC A MC P Q
A MC R A MC R
16
( ) ( ) ,
T
m
P M BK A MC RM
17
( ) ( )
T
m
P M BK A MC RM
66
( ) ( ),
T
H M BK R M BK
67
( ) ( ),
T
M BK R M BK
68
()
T
m
M BK RB
77
( ) ( ) ,
T
M BK R M BK H
78
( ) ( ) ,
T
M BK R M BK H
2
88
,
T
m
I B RB
( ) ( ) ( ) ( ) ( )
( ) ( ) .
m
m
t
TT
t
tt
T
ts
V t e t Pe t e s Qe s ds
e v Re v dvds
11
( ) 2 ( ) ( ) ( ) ( )
( ) ( ) ( )
1
( ( ) ( ( )) ( ( ) ( ( ))
()
31
( ( ( )) ( ))
( ) ( )
3
( ( ( )) ( ))
()
T T T
m
T
mm
T
TT
m
m
V t e Pe t e t Qe t e t
Qe t e t Re t
e t e t t R e t e t t
t
R e t t e t
tt
R e t t e t
t
22
( ) ( ) ( ( )) ( ( )),
T
TT
kk
R
e t He t y t t Hy t t
2
0
1
0
2
1
0
2
[ ( ) ( ) ( ) ( )]
11
{ [ ( ) ( ) ( )
( ) ( )] } ( )
11
{ [ ( ) ( ) ( )
( ) ( )] },
T
TT
k
T
v
T
k
T
v
T
y t y t t t dt
th
vv
y t y t V t
th
vv
t t dt V t
th
vv
y t y t V t
th
vv
t t dt
vZ
2
0
[ ( ) ( ) ( ) ( )] ( ) ( )
T
T T T
y t y t t t dt t t
()
1
[ ( ) ( ( )) ( ) ( )
()
t
T T T T
m
tt
e t e t t e t e s
t
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
370
Furthermore, let , the following result can be
obtained
(20)
The Theorem has been proved by the statement
(16)-(20). The error system (14) is proved to be
asymptotic stability under the H∞control with the
inhibition of level γ. The proof is completed.
4 NUMERICAL EXAMPLE
In this section, a numerical example is presented to
prove the effectiveness of the results. Considering
the following parameters
, ,
, .
Assuming that and the
initial , , the H∞
performance index .
Then, the following data can be obtained by
LMIs as
, ,
, .
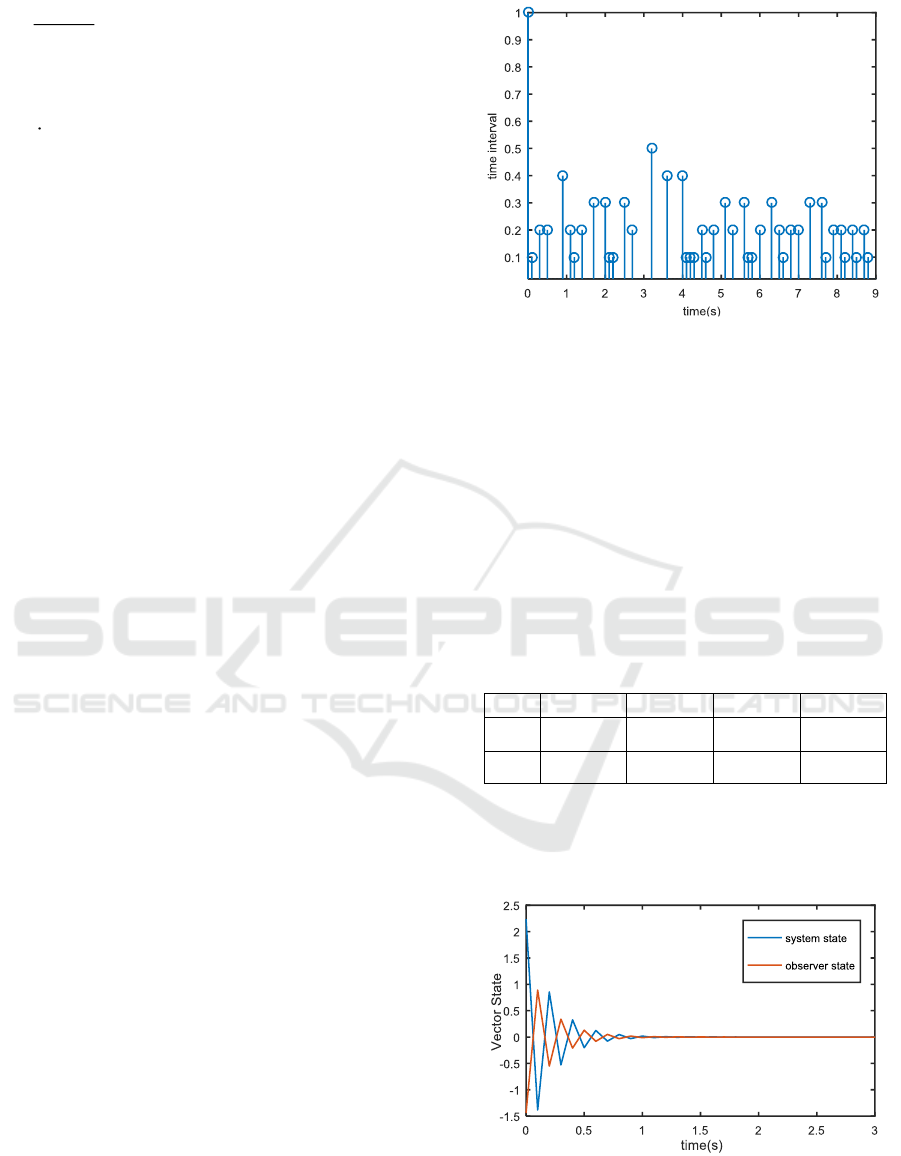
What’s more, the triggered intervals of the
system (14) based on the event-triggered mechanism
(3) is described in Figure 1.
Figure 1. The relationship between triggered intervals and
time.
By the different value of , the upper bound of
the time delay changed. TABLE 1 is given to
reveal the relationship between the two factors and
show the minimum of H∞ performance index.
TABLE 1 shows that the increase of can
decrease the upper bound of the time delay, so a
suitable numerical value can be chosen within the
appropriate limits to minimize the delay. This utility
reduced network bandwidth and decrease the
pressure on network transmission.
Table 1. The relationship between the parameters.
0.1
0.2
0.3
0.4
0.1122
0.1001
0.0962
0.0324
0.5305
0.7311
3.0322
3.7421
Furthermore, the relationship between state
vector and release instants can be obtained in
the Figure 2.
Figure 2. State responses of the system with the event
triggered mechanism.
()
1
( ) ( ) ( ) ( )] .
()
m
tt
T T T T
k
t
m
e s ds e t e t t
t
T
2
( ) ( ) ( ) ( ) ( ) ( ) ( ).
T T T
V t t t y t y t t t
0.2 0.17
0.17 0.2
A
2.5 2
0.6 1.7
B
2.2 1.1
2 1.1
C
10.155 5.217
6.175 40.568
K
2, 2 , 1B M I h
0.2
sin(2 ) 0.2
()
sin( )
t
ut
t
2
0.556 0.4537
0.4537 0.2961
P
6.837 2.7
2.7 1.29
Q
0.29 0.046
0.046 0.2736
R
160.6 375.5
300.14 307.54
H
m
m
min
()xt
t
Event-triggered Observers-based Output Feedback H Control for Linear Time-invariant Systems with Quantization
371

5 CONCLUSIONS
The problem of observers-based event-triggered H∞
control has been addressed in this paper. By
considering the event-triggered mechanism and the
quantization, a new observers-based system is
proposed in this paper. Based on this system, we
derived H∞ performance criterion that guarantees
the LTI system is stable with H∞ performance index
γ. Periodical sampling and output feedback
controller is also used to complete the design of the
system. The effectiveness of the proposed method
has been demonstrated by a numerical example.
REFERENCES
A. D. Dominguez-Garcia, J. G. Kassakian, and J. E.
Schindall, 2009."A generalized fault coverage model
for linear time-invariant systems,” IEEE Transactions
on Reliability, vol. 58, no. 3, pp. 553–567.
A. Seuret and F. Gouaisbaut, 2013. “Wirtinger-based
integral inequality: Application to time-delay systems,”
Automatica, vol. 49, no. 9, pp. 2860–2866.
C. A. Desoer and M. Y. Wu, 1968. “Stability of linear
time-invariant systems,” IEEE Transactions on Circuit
Theory, vol. 15, no. 3, pp. 245–250.
E. Garcia and P. J. Antsaklis, 2013. “Model-based event-
triggered control for systems with quantization and
time-varying network delays,” IEEE Transactions on
Automatic Control, vol. 58, no. 2, pp. 422–434.
F. Perez-Gonzalez and C. Mosquera, 2008.
“Quantization-based data hiding robust to linear-time-
invariant filtering,” IEEE Transactions on Information
Forensics and Security, vol. 3, no. 2, pp. 137–152.
G. Bertotti, A. Boglietti, M. Chiampi, and D. Chiarabaglio,
1991.”An improved estimation of iron losses in
rotating electrical machines,” IEEE Transactions on
Magnetics, vol. 27, no. 6, pp. 5007–5009.
J. Alonsomontesinos, F. J. Batlles, H. Lund, and M. J.
Kaiser, 2015. “The use of a sky camera for solar
radiation estimation based on digital image
processing,”Energy, vol. 90, pp. 377–386.
P. Tabuada, 2007. “Event-triggered real-time scheduling
of stabilizing control tasks,” IEEE Transactions on
Automatic Control, vol. 52, no. 9, pp. 1680–1685.
R. M. Gray and D. L. Neuhoff, 1998. “Quantization,”
IEEE Transactions on Information Theory, vol. 44, no.
6, pp. 2325–2383.
S. Hajshirmohamadi, M. Davoodi, N. Meskin, and F.
Sheikholeslam, 2016. “Event-triggered fault detection
and isolation for discrete-time linear systems,” IET
Control Theory and Applications, vol. 10, no. 5, pp.
526–533.
X. M. Zhang, Q. L. Han, and B. L. Zhang, 2017. “An
overview and deep investigation on sampled-data-
based event-triggered control and filtering for
networked systems,” IEEE Transactions on Industrial
Informatics, vol. 13, no. 1, pp. 4–16.
Z. M. Zhang, Y. He, M. Wu, Q. G. Wang, Z. M. Zhang, Y.
He, M. Wu, and Q. G. Wang, 2019. “Exponential
synchronization of neural networks with time-varying
delays via dynamic intermittent output feedback
control,” IEEE Transactions on Systems, Man and
Cybernetics, vol. 49, no. 2, pp. 612-622.
ICVMEE 2019 - 5th International Conference on Vehicle, Mechanical and Electrical Engineering
372
