
Motion Information Transmission for On-neck Communication
Takahide Ito
1
, Yuichi Nakamura
2
, Kazuaki Kondo
2
, Jonathan Rossiter
3
, Junichi Akita
4
and Masashi Toda
5
1
Graduate School of Engineering, Kyoto University, Kyoto, Japan
2
Academic Center for Computing and Media Studies, Kyoto University, Kyoto, Japan
3
University of Bristol & Bristol Robotics Laboratory, Department of Engineering Mathematics,
University of Bristol, Bristol, U.K.
4
Kanazawa University, Kanazawa, Japan
5
Kumamoto University, Kumamoto, Japan
akita@is.t.kanazawa-u.ac.jp, toda@cc.kumamoto-u.ac.jp
Keywords:
User Interface, Motion Communication, Wearable Device, Nursing, Electromyography, Skin-stretcher.
Abstract:
This paper introduces a novel form of communication via a combination of muscle sensing by electromyogra-
phy and stimulation via a skin-stretcher device as a motion monitoring system. After sensing muscle activity
through electromyography, the skin-stretcher device provides a skin sensation that confidentially informs or
induces movements of the user who wears the device. This paper also introduces methods for translating mus-
cle activities to the skin-stretch sensations, and additional filtering to improve the performance. In this study,
we conducted preliminary experiments that demonstrate the potential of our system design.
1 INTRODUCTION
We are developing a skin-stretcher device as a tool for
communication that uses skin sensations to transmit
motion information or induce motions. The device
gently and locally pushes or pulls the skin by contract-
ing or expanding itself via a link structure driven by
a servomotor. Although the device was originally de-
signed to induce a motion that is consistent with skin-
stretch sensation, it can be also used as a somatosen-
sory communication device.
Informing and prompting appropriate motions
provides intuitive support for sports, job training,
and rehabilitation (Kawasaki et al., 2006)(Spelmezan
et al., 2009). Communicating touch or movement
information provides an excellent tool for remote
care, nursing, and intimate communication for fam-
ily members (Doi et al., 2006)(Bentley and Metcalf,
2007). Sharing motion information can also support
group activities that require mutual awareness or joint
force with coordinated timing.
As an effective means for this type of communi-
cation, we focused on skin sensations, in particular,
the sensation of skin stretching. Our past experiments
have shown that good characteristics of the device,
e.g., the head of a person turns proportionally to the
length pulled by the device, can make the human-in-
the-loop design of a human-supporting system easy.
In this study, we focus on an application of our de-
vice to a motion monitoring system for care or nursing
scenarios. In the following sections, we introduce the
idea of motion communication, its design, the transla-
tion of head motion to device actions, and its perfor-
mance as measured via our experiments.
2 COMMUNICATION OF HEAD
MOTION
2.1 Importance of Head Motion
Head motion is a fundamental function for a variety
of movements in our daily lives. The human head
is continuously controlled to maintain an appropriate
position and pose.
A head motion is often an initial step for other im-
portant motions in addition to its own motions. When
we get out of bed, the motion of raising the head pre-
cedes other body motions. Head rotation often reveals
the internal states of a person. For example, we of-
ten expect that the attention of a person is directed
206
Ito, T., Nakamura, Y., Kondo, K., Rossiter, J., Akita, J. and Toda, M.
Motion Information Transmission for On-neck Communication.
DOI: 10.5220/0008417402060213
In Proceedings of the 3rd International Conference on Computer-Human Interaction Research and Applications (CHIRA 2019), pages 206-213
ISBN: 978-989-758-376-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

toward something frontal to the face (Clark, 1996).
Head motions, for example, of seeing a partner and
nodding are natural and essential behaviors in natural
conversations. In caregiving, head motions are one
of the most important signals that require the care-
ful attention of caregivers when monitoring patients.
We consulted staff members at Nishikagawa Hospital,
and they highlighted several actions that require care-
ful attention. For example, movements for rising or
standing need to be noted prevent patients accidents.
Details of the doctor and staff are presented in Ap-
pendix 6.
Even though there are other important body parts
for motion monitoring such as hands or legs, such
body parts move more dynamically and interact with
other objects (Ivanenko et al., 2004)(Kuan et al.,
2010). Such large movements require continuous and
intensive attention to grasp the status of patients.
Based on the above considerations, we investi-
gated head motion as a means of communicating per-
sons’ states.
2.2 Characteristics of Head Motion
Head motions primarily consist of rotation, flexion,
and extension.
We first focus on the mechanism of head rotation.
Head motions are caused primarily by the contraction
of the agonist and antagonist muscles around the neck
(Zangemeister et al., 1982). The dynamics of head ro-
tation can be roughly approximated by the following
simple formula:
I
¨
θ + B
˙
θ + Kθ = T (1)
where I, B, K, θ, and T represent the moment of in-
ertia, viscosity coefficient, elasticity coefficient, rota-
tion angle, and rotation torque of the head, respec-
tively.
We can see the rough relation between the rota-
tion angle and the muscle contraction that provides
the torque T . However, the antagonism of the mus-
cles reduces the rotation torque and increases the stiff-
ness, which is also an important mechanism for body
movements. The antagonism, viscosity, and elastic-
ity cause difficulties for direct estimations of the head
movement from the muscle measurements, e.g., elec-
tromyography; however, muscle activities can poten-
tially provide a rich source of information concerning
body movements, intention, and other states of a per-
son.
2.3 Requirements for Motion
Information Transmission
Let us consider the requirements or preferences for
motion information transmission by considering care-
giving applications, one of the promising applications
of such a system.
(a) Transmits Motion Quickly. Timing is one of
the most important factors for caregiving. Patient
movements that require a caregiver’s support or
that might result in dangerous situations need to
be informed as soon as possible; predictions may
even be necessary in some cases.
(b) Provides Natural Stimuli That Are Intuitively
Perceived. Noninvasive stimulation is preferable,
because the caregiver receiving information may
need to concentrate on their own activities.
(c) Allows a User’s Voluntary Movements. If a
caregiver is wearing a motion transmitting device
and the device applies a strong force that compels
the user to move counter to the user’s intention,
this may result in dangerous situations or acci-
dents. The device needs to allow the user to ignore
the stimulus and prioritize voluntary movements
if necessary.
(d) Confidentially Transmit Information if Neces-
sary. Patient information is often confidential and
is closed to unrelated persons. Audiovisual com-
munications are often inappropriate because they
may be observed by nearby persons.
These requirements are also considered important in
other situations, such as job training, joint projects,
and rehabilitation support.
Based on these considerations, we propose a novel
communication method by a combination of muscle
sensing via electromyography and stimulation via a
skin-stretcher device. With sensing muscle activity
through electromyography, we can directly capture
muscle contractions for movements and obtain clues
concerning the intentions of the movements. The
skin-stretcher device provides skin sensation that con-
fidentially informs or induces movements of the user
who wears the device. Details are given in the follow-
ing sections.
3 SYSTEM DESIGN
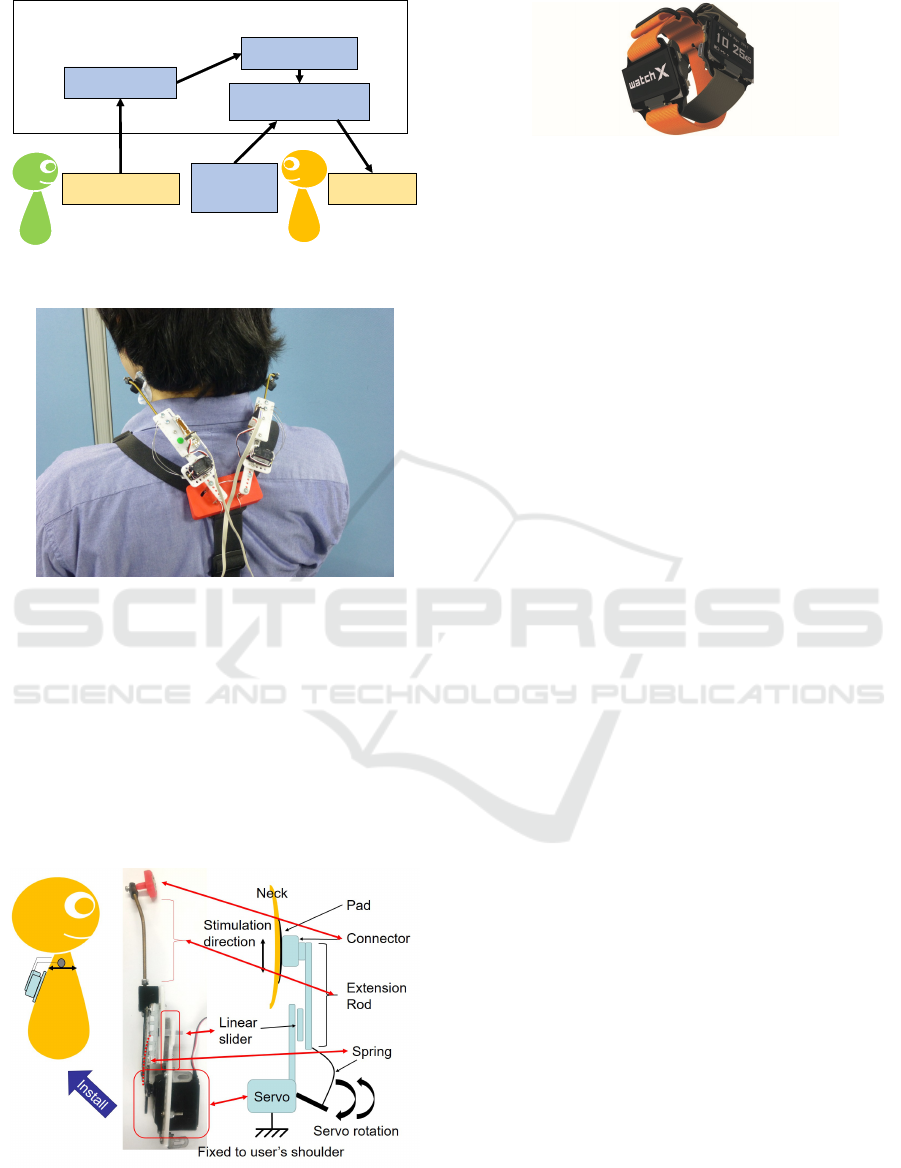
Figure 1 shows an overview of our motion transmit-
ting system. The system comprises a motion-sensing
part using electromyography (EMG) and a motion-
indicating part using a skin-stretcher device.
Motion Information Transmission for On-neck Communication
207
DŽŶŝƚŽƌĞĚ
ƉĞƌƐŽŶ
DŽŶŝƚŽƌŝŶŐ
ƉĞƌƐŽŶ
D'ŵĞĂƐƵƌĞŵĞŶƚ
;^ƚĞƌŶŽĐůĞŝĚŽŵĂƐƚŽŝĚͿ
ĂůĐƵůĂƚĞ
ŵƵƐĐůĞĂĐƚŝǀĂƚŝŽŶ
^ŬŝŶͲƐƚƌĞƚĐŚĞƌ
^ĞůĞĐƚ
ĞŶŚĂŶĐĞŵĞŶƚ
ƚLJƉĞ ;tĂƚĐŚyͿ
ŽŶǀĞƌƐŝŽŶĨƌŽŵŵƵƐĐůĞĂĐƚŝǀĂƚŝŽŶ
ƚŽƐƚŝŵƵůĂƚŝŽŶ
dƌĂŶƐůĂƚĞƚŽ
ƐƚŝŵƵůĂƚŝŽŶƐŝŐŶĂů
&ŝůƚĞƌŝŶŐͬĞŶŚĂŶĐĞŵĞŶƚ
Figure 1: Overview of our motion transmitting system.
Figure 2: The skin-stretcher device attached to a user’s
neck.
3.1 Motion Indication
Figures 2 and 3 show the appearance and the configu-
ration of our skin-stretcher device, respectively.
The device is designed to provide a sensation of
skin stretching to convey motion information and to
induce a motion that is consistent with the sensation;
this is in contrast to previous studies such as Refs.
(Mizukami et al., 2007) or (Levesque et al., 2007).
Figure 3: Configuration of the skin-stretcher device. The
end connector is attached to the neck with two sticky pads,
and the device is fixed to the body with a body-mount har-
ness.
Figure 4: The wristwatch device (WatchX).
The primary features of the device are listed be-
low.
• Skin stretching provides a natural and intuitive
stimulus that directly but subtly indicates the di-
rection of the head rotation.
• The device does not apply a strong force that com-
pels the user to move counter to their own inten-
tions. The user can override the stimulus and pri-
oritize voluntary movements if necessary.
• The device can be used not only to induce motions
but also to impart the feeling of motion. The user
can feel the movement of the pads even if the user
does not move as requested by the device.
Despite the above advantages, the device has the
following problems.
• The sensation that the user receives may vary de-
pending on the user’s characteristics, activity, and
the device attachment. The stimuli may be too
small, too annoying, or need to be more focused
on specific movements.
• Communication via sensations is possible for one-
to-one communication; however, it is difficult to
resolve if motion signals from multiple persons
are transmitted simultaneously and mixed. We re-
quire a mechanism for selecting the signal from
the specific person that we want to monitor.
To deal with these problems, we use a wristwatch
device (WatchX) that can be used to choose signals
for stimuli and the characteristics of stimuli, such as
gain.
WatchX is an Arduino-based device and has a
small display with three buttons as the output as
shown in Figure 4. It can communicate via Bluetooth
Low Energy.
3.2 Motion Sensing via EMG
We use myoelectric sensing (EMG) based on the fol-
lowing advantages.
• With EMG, we can measure the opposition by the
agonist and antagonist muscles, even if they do
not appear as actual joint torques.
CHIRA 2019 - 3rd International Conference on Computer-Human Interaction Research and Applications
208
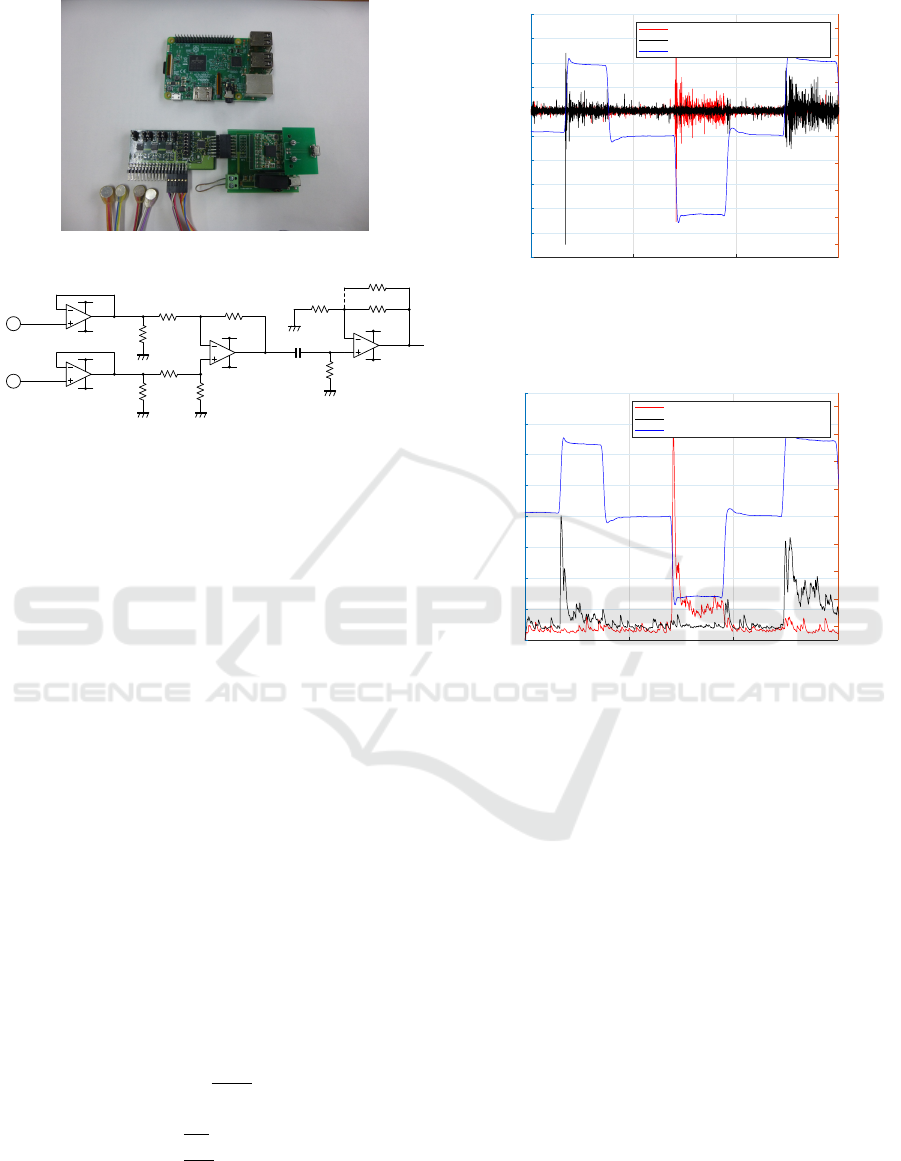
Figure 5: EMG logging device and its host (Raspberry Pi).
Nƻ
23
Nƻ
X)
23
Nƻ
Nƻ
Nƻ
Nƻ
Nƻ
Nƻ
23$J$J&O(OHFWURGH
23$J$J&O(OHFWURGH
Nƻ
Nƻ
9
9
9
9
9
9
9
9
Figure 6: Schematic of the EMG amplifying circuit.
• EMG signals can be detected from earlier stages
of movements, often even before the body posture
changes.
• EMG signals suggest internal states, such as fa-
tigue or other body conditions.
Despite the above advantages, EMG sensing has
the following problems.
• We need to attach electrodes to the skin at the cor-
rect portions. Contacting the electrode affects the
measurements.
• As mentioned in Section 2.2, estimating the head
rotation angle using only EMG signals is difficult.
Other complementary sensors may be added in fu-
ture designs to address these points.
We measure the sternocleidomastoid muscles,
which primarily provide head rotation torque and
tonus, as presented in previous studies (Nishimoto
et al., 1989)(Pejcic et al., 2016).
Figure 5 shows the EMG logging device and its
host (Raspberry Pi). Figure 6 shows the amplifying
circuit for the EMG.
We used the index of the muscle activation, which
is converted from the raw EMG signal, as follows
(Stroeve, 1996).
˙e =
u − e
τ
ne
(2)
˙a =
e−a
τ
act
(e ≥ a)
e−a
τ
deac
(e < a)
(3)
Here, u, e, and a indicate the absolute value of the
raw EMG signal, the intermediate value (the excita-
tion), and the muscle activation, respectively. From a
0 5 10 15
time(sec)
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
EMG signal(mV)
-80
-60
-40
-20
0
20
40
60
80
left - rotation angle amount(degree) - right
quick head rotation
right sternocleidomastoid(activation)
left sternocleidomastoid(activation)
head roration angle
Figure 7: Example of raw EMG signals and the head ro-
tation angle, the red and black lines show the myoelectric
signals during head rotation.
0 5 10 15
time(sec)
0
5
10
15
20
25
30
35
40
normalized muscle activation - %MVC(%)
-80
-60
-40
-20
0
20
40
60
80
left - rotation angle amount(degree) - right
quick head rotation
right sternocleidomastoid(activation)
left sternocleidomastoid(activation)
head roration angle
Figure 8: Example of muscle activations and the head ro-
tation angle (converted from the example in Figure 7, the
red and black lines show the muscle activations during head
rotation.
previous study (Stroeve, 1996), we used τ
ne
= 40ms,
τ
act
= 10ms, and τ
deac
= 50ms for Eqs. (2) and (3).
Figures 7 and 8 show a sample of a raw EMG sig-
nal and its conversation result. The red and black lines
in Figures 7 and 8 show the signals of the right and
left sternocleidomastoid muscles, respectively, and
the blue line shows the head rotation angle measured
using a magnetic positional sensor.
4 TRANSLATION FROM EMG TO
STIMULATION
Sometimes the user (monitoring the motion informa-
tion) may need to quickly obtain every detail of the
motion information, while at other times, the user
may need to concentrate on their own activities. The
strength, timing, and characteristics of the stimuli
provided by the device need to change according to
the user’s needs.
Motion Information Transmission for On-neck Communication
209
^ƚŝŵƵůĂƚŝŽŶ
;/ŶŝƚŝĂůůĞŶŐƚŚͿ
;ĞǀŝĐĞůĞŶŐƚŚͿ
,ĞĂĚƌŽƚĂƚŝŽŶĐĂƵƐĞĚ
ďLJƚŚĞĚĞǀŝĐĞ
;/ŶŝƚŝĂů ƌŽƚĂƚŝŽŶͿ
;ƌĂĚŝƵƐͿ
;ŝƐƚĂŶĐĞͿ
;EĂƚƵƌĂůŚĞĂĚƌŽƚĂƚŝŽŶͿ
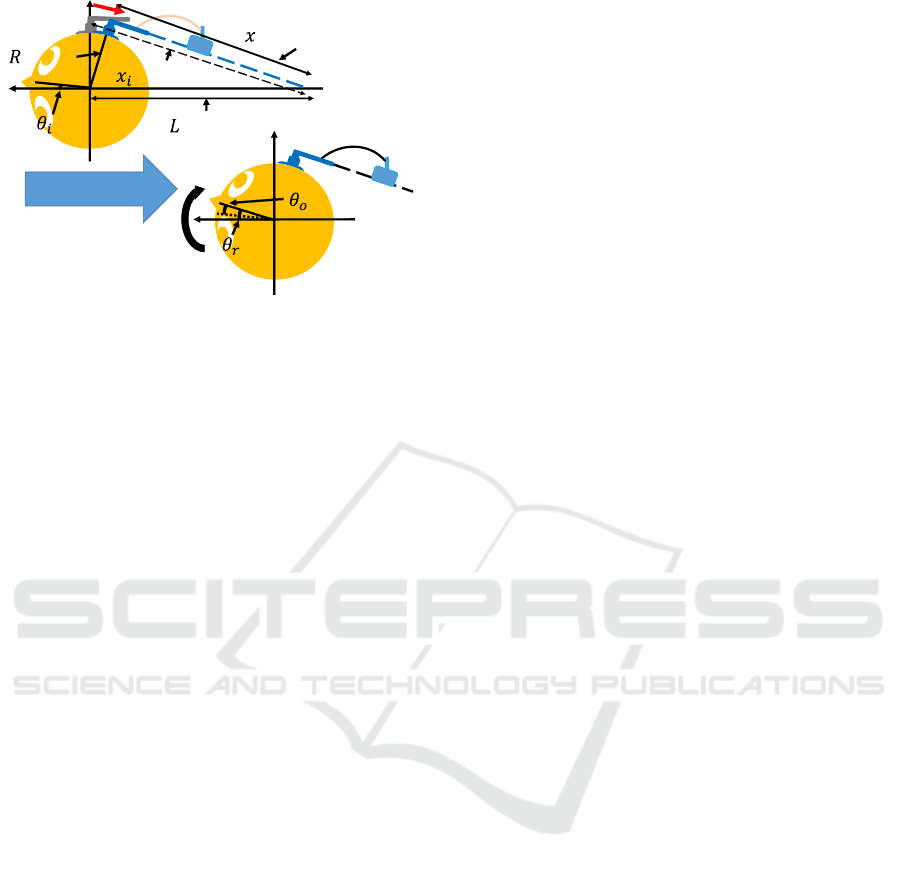
Figure 9: Geometry and action of the device. Calculation
of θ
o
is explained in Appendix 6.
Therefore, the system needs to provide a variety
of transmission modes and leave their selection to the
user.
4.1 Skin-stretch as Stimulation
The input and output of the system are the EMG sig-
nal and the stimulation via the skin-stretch device, re-
spectively.
Figure 9 shows the geometry of the skin-stretcher
device and the head. Based on the head rotation angle
of the monitored person, skin stretch is applied to the
monitoring user. If the monitoring user rotates their
head to an angle at which they feel no skin stretch,
this results in a similar head rotation to that of the
monitored person, even though such an action is not
requested most of the time.
Here, we use the notation in Eqs. (4) and (6) and
denote the head rotation angle of the monitored per-
son as θ
p
, and the natural head rotation angle at which
the monitoring user feels no skin stretch as θ
o
. We
calculated θ
o
as it is explained in Appendix 6, and
it represents the output stimulus. In addition, we as-
sume that the muscle activation and
¨
θ
p
have the same
dimension, as we mentioned in Section 2.2.
Based on the above discussion, we considered
several methods of translation from EMG to the skin
stretch as follows.
(1) Rotation Angle: The approximated rotation an-
gle θ
p
of the monitored person is given to the
monitoring user. θ
p
is approximated by the
second-order integral of torque
RR
T d t which is
also approximated by the muscle activation
RR
a.
This is intuitive and easy to understand; however,
if the postures (the head rotation angles) of both
persons are very different, the stimulus may be
too extreme. Conversely, when the motion of the
monitored person is small, the stimuli often be-
come to be too small to be perceived.
(2) Rotation Angular Velocity: The angular veloc-
ity
˙
θ
p
can be approximated by
R
T d t, which can
also be approximated by
R
a. This method pro-
vides strong stimuli if the head rotation of the
monitored person is fast and weak stimuli if the
head rotation is slow. We expect that motions can
be characterized by their velocity and are less af-
fected by the pose changes of both persons. This
method may partially transmit motion informa-
tion; however, estimations of the actual rotation
angle are difficult.
(3) Rotation Torque: The rotation torque T , which
is derived from a, is a rough approximation of the
angular acceleration. This method transmits de-
tails of even small motions, even though it does
not provide the actual head rotation angle. Con-
sequently, this method transmits every attempt at
movement but can be annoying to the monitoring
user.
In addition, we considered a method for transmit-
ting simultaneous contractions of both the right and
left sternocleidomastoid muscle.
(4) Co-contraction: Muscle activation on both
sides are transmitted, and both sides of the skin
are pushed to the front by the device. This method
also enables the transmission of motion attempts
for flexion, extension, and a state in which the
neck is strained with the stiffness increased.
4.2 Filtering and the Emphasis of
Signals
The following problems arise from the utilization of
skin sensation via the simple attachment of a device
to the skin.
• The condition of the device installation may affect
the user’s perception.
• Small displacements of the skin are often imper-
ceptible, which results in a region of impercepti-
bility.
• The sensation of skin displacement gradually be-
comes imperceptible if no change occurs.
• Frequent or continuous stimulation can be annoy-
ing and feel unpleasant.
To handle those problems, we considered the ap-
plication of filters to selectively emphasize or smooth
the signals.
CHIRA 2019 - 3rd International Conference on Computer-Human Interaction Research and Applications
210

(a) Emphasizing. Considering the above problems
(1), (2), and (3), we consider a filter that empha-
sizes the output to a sufficient level as follows.
θ
m
=
θ
o
(θ
o
> θ
th
)
θ
th
(θ
o
≤ θ
th
)
(4)
Here, θ
o
, θ
m
, and θ
th
are the stimulus defined
in the previous section, the emphasized stimulus,
and the threshold, respectively.
(b) Thining. The input signal can be quantized and
the frequency of the stimulated outputs can be de-
creased as follows.
θ
m
= b
θ
o
C
reso
c ·C
reso
(5)
Here, θ
o
, θ
m
, and C
reso
are the input, output, and
unit of quantization, respectively.
(c) Dealing with Elasticity. When the head rotation
angle is large, the user requires muscle contrac-
tion to keep prevent rotation countering the elas-
ticity of the neck mechanism. This muscle con-
traction may result in a continuous stimulus. This
filter suppresses this effect by emphasizing the
initial change and attenuating the rest of the sig-
nal.
θ
m
=
θ
o
(t ≤ t
th
)
θ
o
exp(−
t−t
th
τ
dec
) (t > t
th
)
(6)
Here, θ
o
, θ
m
, θ
th
, t, t
th
, and τ
dec
are the input, out-
put, elapsed time after muscle activation, thresh-
old of the time, and time constant for attenuation,
respectively.
5 PRELIMINARY EXPERIMENTS
5.1 Experimental Setting
We conducted preliminary experiments in the follow-
ing setting. We asked one participant to perform the
following three behaviors as a monitored person and
measured the muscle activations using EMG.
(a) Simple Head Movement: Rotating the head
right and left, and shrugging the shoulders.
(b) Conversation: Rotating the head in a conversa-
tional situation.
(c) Daily Movements: Standing up or getting up
motions.
Then, we asked the rest of the participants to wear
the device, discriminate the activity, and subjectively
evaluate the quality of the system based on the follow-
ing points; which task is performed, and their feeling
concerning the effectiveness and comfort of the stim-
ulation. During the experiment, participants did noth-
ing except feel the stimuli of the system while remain-
ing seated.
Typical responses from the participants concern-
ing the input-output translation methods were as fol-
lows.
• All translation methods worked well for simple
head movements, and the identification of the task
was easy.
• It was easy to distinguish conversational behav-
iors from other behaviors.
• Identifying the behavior of getting up required
concentration because the motion happens over a
short period of time and the signals were small.
• The translation method (1) sometimes gave am-
biguous stimuli for identifying the standing up
and getting up tasks.
• Fast stimuli, i.e., pulling the skin faster, made
recognition easier.
As highlighted above, translation method (1) did
not provide sufficient stimulations for complex or
continuous motions because small motions are often
difficult to perceive with this method. Quantization
slightly improves the performance; however the per-
formance was not satisfactory compared to transla-
tion methods (2) and (3). We did not find clear per-
formance differences between translation methods (2)
and (3); we need further experiments to address this
point.
For the filtering methods, typical impressions of
the participants were as follows.
• The Emphasis filter helped with the perception of
small movements.
• Continuous small stimuli were unpleasant, and fil-
tering (the thinning filter) was necessary.
• Emphasizing the initial part of the head move-
ments helped with the identification of behaviors,
e.g., this helped with distinguishing actual head
rotations from increased stiffness for stabilization.
The above results imply that the emphasis filter
and quantization had the beneficial effects that we ex-
pected. These experiments and results are prelimi-
nary and do not cover all the necessary situations for
our purposes. Further experiments for systematic ver-
ifications and evaluations are necessary, and we are
planning to continue our investigation.
Motion Information Transmission for On-neck Communication
211

6 CONCLUSIONS
In this paper, we introduced a novel system for mo-
tion monitoring. The proposed system transmits mo-
tion information using muscle sensing via EMG and
skin sensations transmitted via the skin-stretcher de-
vice. We also introduced methods to translate muscle
activities to skin-stretch sensations as well as filtering
to improve the performance of the device.
Our preliminary experimental results show the po-
tential of our system design.
We need further investigations with systematic ex-
periments to verify our framework and examine the
performance of our system.
ACKNOWLEDGEMENTS
We would like to thank Dr. Tomotake Otsuka and the
staffs in Nishikagawa Hospital for useful discussions
and suggestions.
REFERENCES
Bentley, F. R. and Metcalf, C. J. (2007). Sharing motion in-
formation with close family and friends. In Proceed-
ings of the SIGCHI Conference on Human Factors in
Computing Systems, CHI ’07, pages 1361–1370, New
York, NY, USA. ACM.
Clark, H. H. (1996). Using Language. ’Using’ Linguistic
Books. Cambridge University Press.
Doi, M., Inoue, H., Aoki, Y., and Oshiro, O. (2006). Video
surveillance system for elderly person living alone by
person tracking and fall detection. IEEJ Transactions
on Sensors and Micromachines, 126(8):457–463.
Ivanenko, Y. P., Poppele, R. E., and Lacquaniti, F. (2004).
Five basic muscle activation patterns account for mus-
cle activity during human locomotion. The Journal of
Physiology, 556(1):267–282.
Kawasaki, H., Kimura, H., Ito, S., Nishimoto, Y., Hayashi,
H., and Sakaeda, H. (2006). Hand rehabilitation sup-
port system based on self-motion control, with a clin-
ical case report. In 2006 World Automation Congress,
pages 1–6.
Kuan, J., Huang, T., and Huang, H. (2010). Human inten-
tion estimation method for a new compliant rehabil-
itation and assistive robot. In Proceedings of SICE
Annual Conference 2010, pages 2348–2353.
Levesque, V., Pasquero, J., and Hayward, V. (2007).
Braille display by lateral skin deformation with the
stress2 tactile transducer. In Second Joint EuroHap-
tics Conference and Symposium on Haptic Interfaces
for Virtual Environment and Teleoperator Systems
(WHC’07), pages 115–120.
Mizukami, Y., Uchida, K., and Sawada, H. (2007). Tac-
tile transmission by higher-level perception using vi-
bration of shape memory alloy thread. IPSJ journal,
48(12):3739–3749.
Nishimoto, K., Kobayashi, S., Hashimoto, T., Okubo, M.,
Ohori, T., Kikunaga, H., Nishimoto, H., and Koda, T.
(1989). Surface electromyographic analysis for sitting
from supine, side lying and prone positions. Physical
Therapy Japan, 16(5):317–322.
Pejcic, N., Djuric-Jovicic, M., Miljkovic, N., Popovi
´
c, D.,
and Petrovi
´
c, V. (2016). Posture in dentists: Sitting
vs. standing positions during dentistry work - an emg
study. Srpski arhiv za celokupno lekarstvo, 144:181–
187.
Spelmezan, D., Jacobs, M., Hilgers, A., and Borchers, J.
(2009). Tactile motion instructions for physical ac-
tivities. In Proceedings of the SIGCHI Conference
on Human Factors in Computing Systems, CHI ’09,
pages 2243–2252, New York, NY, USA. ACM.
Stroeve, S. (1996). Learning combined feedback and feed-
forward control of a musculoskeletal system. Biolog-
ical Cybernetics, 75(1):73–83.
Zangemeister, W. H., Stark, L., Meienberg, O., and Waite,
T. (1982). Neural control of head rotation: Elec-
tromyographic evidence. Journal of the Neurological
Sciences, 55(1):1–14.
APPENDIX
Opinions of Doctors and Caregiving
Staffs in Nishikagawa Hospital
We consulted doctors and the nursing staffs members
in Nishikagawa Hospital in the city of Mitoyo, Ka-
gawa, Japan. We discussed the purpose and require-
ments of motion monitoring and obtained the follow-
ing opinions.
• The Detecting and Support of Getting Up,
Standing Up, and Starting Walking Behaviors
Are Extremely Important. Elderly people tend
to have accidents during the initial steps of these
behaviors, and they have a lower likelihood of
accidents after they have passed the initial steps.
Therefore, motion monitoring of these behaviors
would greatly help nursing or caregiving staff
members.
• Give Support Only When Necessary. Ideal
caregiving involves letting patients act by them-
selves except in situations in which they really
need or want help. Motion motoring is also use-
ful in that patients can behave naturally and care-
givers can notice situations where assistance is
necessary. This contributes to maintaining the pa-
tient’s self-esteem and quality of life.
CHIRA 2019 - 3rd International Conference on Computer-Human Interaction Research and Applications
212

Calculating the Natural Head Rotation
Figure 9 shows the geometry of the device and the
head. The device is initially attached with the con-
dition that the extension rod is parallel to the tangent
of the neck. We approximate the relation between the
natural head rotation and the device length by the fol-
lowing formulas:
R
2
+ x
2
0
= L
2
(7)
cos
π
2
− θ
r
= −
R
2
+ L
2
− x
2
2RL
(8)
where R is the approximated radius of the neck, L is
the distance between the center of the device and the
center of the neck, x and x
i
are the actual and the ini-
tial length of the skin-stretcher device, respectively.
θ
r
is the head rotation at which the user feels no skin
stretch. It is represented by the angle between the ori-
entation from the center of the neck toward the pad
and the vertical axis as shown in Figure 9. θ
i
is the
initial head rotation.
As we consider the above mechanism as a man-
machine system, the natural head rotation angle of
monitoring person θ
o
is the head rotation angle re-
quested by the skin displacement, which is caused
by θ
r
− θ
i
. We do not directly use the rotation angle
of the servo motor for calculating the input value be-
cause the extension rod and the servo motor are con-
nected by the elastic link, i.e., the rotation angle of
the servo motor and the displacement of the rod do
not hold stable relationships. Alternatively, the dis-
placement ∆x is directly measured by the potentiome-
ter installed in the device. Thus the natural head rota-
tion angle θ
o
can be estimated using ∆x by the above
equations.
Motion Information Transmission for On-neck Communication
213
