
Simulation Model for Road Cycling Time Trials with a Non-constant
Drag Area
Eivind Rømcke
1
, Elias Brattli Sørensen
1
, Petter Fossan Aas
1
, Lars Morten Bardal
1
,
Steinar Liebe Harneshaug
1
, Magnus Lysholm Lian
1
, Luca Oggiano
1
and Scott Drawer
2
1
Centre for Sports Facilities and Technology, Norwegian University of Science and Technology, Trondheim, Norway
2
Team INEOS, U.K.
Keywords:
Road Cycling, Time Trial, Simulation, Aerodynamics, Reynolds Number, Drag Area, Mathematical Model.
Abstract:
In a time trial in road cycling, the choice of equipment has a great impact on the results. The purpose of this
paper is to expand an existing model for road cycling to account for changes in drag coefficient with changes
in the Reynolds number of the air flow. The model gives a prediction of the performance of a cyclist given a
certain equipment setup. The model may be used to test different setups and identify the fastest one for a given
race. Simulations with existing models have given a mean absolute error of 3.87% of the total time. Validation
of the model in this paper yielded predictions that had a mean absolute error of 3.22%. The model correctly
predicts the fastest setup, but further testing and validation is required to show its statistical accuracy. Potential
improvements of the model includes improved data sets to increase precision of the inputs, and thereby reduce
simplifications and assumptions.
1 INTRODUCTION
1.1 Background
In road cycling time trials (TT) there are very small
margins that separates the best riders. Being at the
very top requires a precise race plan, and factors like
choice of bike, wheels, suit and other equipment may
be decisive for a winning race. The following phys-
ical parameters are considered the most influential in
a time trial.
• Pedaling Power. The power produced by the rider
power input to the system that, along with gravity,
balances power losses.
• Aerodynamics. Air resistance will greatly affect
the velocity, and depends on the rider’s position
on the bike, equipment, size and wind.
• Rolling Resistance. Friction by deformation of
tires and roughness of the road surface will intro-
duce a power loss.
• Mechanical Energy. The mechanical energy of
the rider will change with velocity and altitude in
the gravitational field.
Mathematical models of road cycling have been de-
veloped in previous publications (E di Prampero et al.,
1979); (Olds et al., 1993); (Olds et al., 1995); (Martin
et al., 1998); (Dahmen et al., 2011). Previous models
do not account for changes in drag area with changes
in the Reynolds number of the air flow. Instead, drag
area, defined as the product of drag coefficient and
frontal area (C
D
A), is usually set as an approximated
constant from experiments. The model developed by
(Olds et al., 1995) yielded an mean absolute simula-
tion error of 3.87%. This result is used as a reference
for what is considered the maximum acceptable error
for the model in this paper.
This model is based on the model introduced by
(Martin et al., 1998), often referred to as the Martin
model. The Martin model is a mathematical model
which accounts for the key parameters influencing the
power balance of a cyclist. It is applying the law
of preservation of energy in a road cycling context.
Equation 1 shows the total power affecting the rider.
P
TOT
= (P
AT
+ P
RR
+ P
W B
+ P
PE
+ P
KE
)
1
E
c
(1)
Here the different terms correspond to the follow-
ing power contributions.
P
AT
: The wind resistance.
P
RR
: The rolling resistance.
P
W B
: Friction in the wheel bearings.
P
PE
: Changes in potential energy.
P
KE
: Changes in kinetic energy.
76
Rømcke, E., Sørensen, E., Aas, P., Bardal, L., Harneshaug, S., Lian, M., Oggiano, L. and Drawer, S.
Simulation Model for Road Cycling Time Trials with a Non-constant Drag Area.
DOI: 10.5220/0008165800760083
In Proceedings of the 7th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2019), pages 76-83
ISBN: 978-989-758-383-4
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

E
c
is the power loss factor in the drive train of the
bike. Equation 2 shows the total power input of a cy-
clist modeled and expanded from the terms in Equa-
tion 1, where each line corresponds to the respective
power contribution described above. The drag area,
C
D
A was originally set as a constant found from ex-
periments in the Martin model.
P
TOT
=
"
1
2
ρ(C
D
A + F
W
)V
2
a
V
G
+ V
G
[cos(arctan(G
R
))]C
RR
m
T
g
+ V
G
(91 + 8.7V
G
)10
−3
+ V
G
m
T
gsin(arctan(G
R
))
+
1
2
(m
T
+
I
r
2
)
V
2
G,1
− V
2
G,0
∆t
#
1
E
C
(2)
Here ρ is air density, C
D
is the drag coefficient, A
is projected frontal area, V
a
is relative velocity, V
G
is
ground velocity, G
R
is road gradient, m
T
is total sys-
tem mass, g is gravitational acceleration and r is wheel
radius. V
G,0
and V
G,1
represent initial and final ground
velocity within a time segment ∆t, respectively. The
constant coefficients are described in Chapter 2.3.1.
1.2 Objectives
The model developed by Martin (Martin et al., 1998)
was used to predict power with a satisfying accuracy
on flat tracks with constant drag area. Accounting for
Reynolds number dependency of the drag area allows
for a more ambitious use of the model. Here the inter-
est lies in attempting to predict what equipment setup
will allow the rider to be fastest on a set course, given
the conditions on the day of the race. As such, the ob-
jective of this modified model is to predict time trials
with a mean absolute difference of less than 3.87%
of the actual time, and to correctly predict the best
equipment setup.
2 METHODS
2.1 Model Description
The Martin model can be modified to account for vari-
ation in C
D
A with variations in the Reynolds number
of the air flow. To do this, the model must use the
effective wind velocity parallel to the riding direction
given a certain yaw angle, to return the correct drag
area for those conditions. For this model, these values
were obtained through wind tunnel testing. However,
(Dahmen and Saupe, 2011) point to the use of com-
putational fluid dynamics (CFD) as an alternative to
this. V
a
from Equation 2 is the effective wind veloc-
ity found by calculating the length of the vector sum
of the ground velocity, V
G
and the wind velocity V
w
.
This is shown in Equation 3.
V
a
=
s
V
w
· cos(φ − θ) − V
G
2
+
V
w
· sin(φ − θ)
2
(3)
Here the ground velocity, V
G
, is given as a negative
value as the air resistance works in the opposite direc-
tion of the rider’s direction of travel. The difference
between φ and θ will provide the angle of the riding di-
rection relative to the wind, where φ is the riding direc-
tion and θ is the wind direction. The axes are defined
in such a way that zero degrees is wind blowing east-
wards and the angles increase counter-clockwise. The
angle between the rider’s velocity vector relative to the
ground, and the effective wind velocity is known as the
yaw angle. This angle is necessary to find the correct
drag area.
yaw = arctan
V
w
· sin(φ − θ)
V
w
· cos(φ − θ) − V
G
!
(4)
These values are then used in the calculation of the
total power from the wind, as in Equation 5.
P
AT
=
1
2
ρ
C
D
A + F
w
· V
G
·
V
w
· cos(φ − θ) − V
G
2
+
V
w
· sin(φ − θ)
2
!
· cos
yaw
(5)
To calculate the total time of the race, Equation 5
is inserted into to Equation 2, and then discretized by
dividing the course into segments. This is shown in
Equation 6, which is solved for V
G
to find the velocity
of the rider for each segment, j. By making the segment
small enough, all quantities can be considered constant
over the segment.
Simulation Model for Road Cycling Time Trials with a Non-constant Drag Area
77
"
1
2
ρ
C
D
A
j
+ F
w
· V
G, j
·
V
w, j
· cos(φ
j
− θ
j
) − V
G, j
2
+
V
w, j
· sin(φ
j
− θ
j
)
2
!
· cos
yaw
j
+ V
G, j
C
RR
m
T
gcos(arctan(G
R, j
))
+ V
G, j
91 + 8.7 · V
G, j
· 10
−3
+ V
G, j
m
T
gsin(arctan(G
R, j
))
+
m
T
+
I
r
2
V
2
G, j
− V
2
G, j−1
L
j
V
G, j
+t
j−1
#
1
E
C
− P
j
= 0
(6)
Here, C
D
A is interpolated from table values, based
on the velocity in the previous segment. The elapsed
time per segment is then derived by dividing the seg-
ment length, L
j
by the segment velocity V
j
. This is
done for all segments, j, using all equipment setups, i.
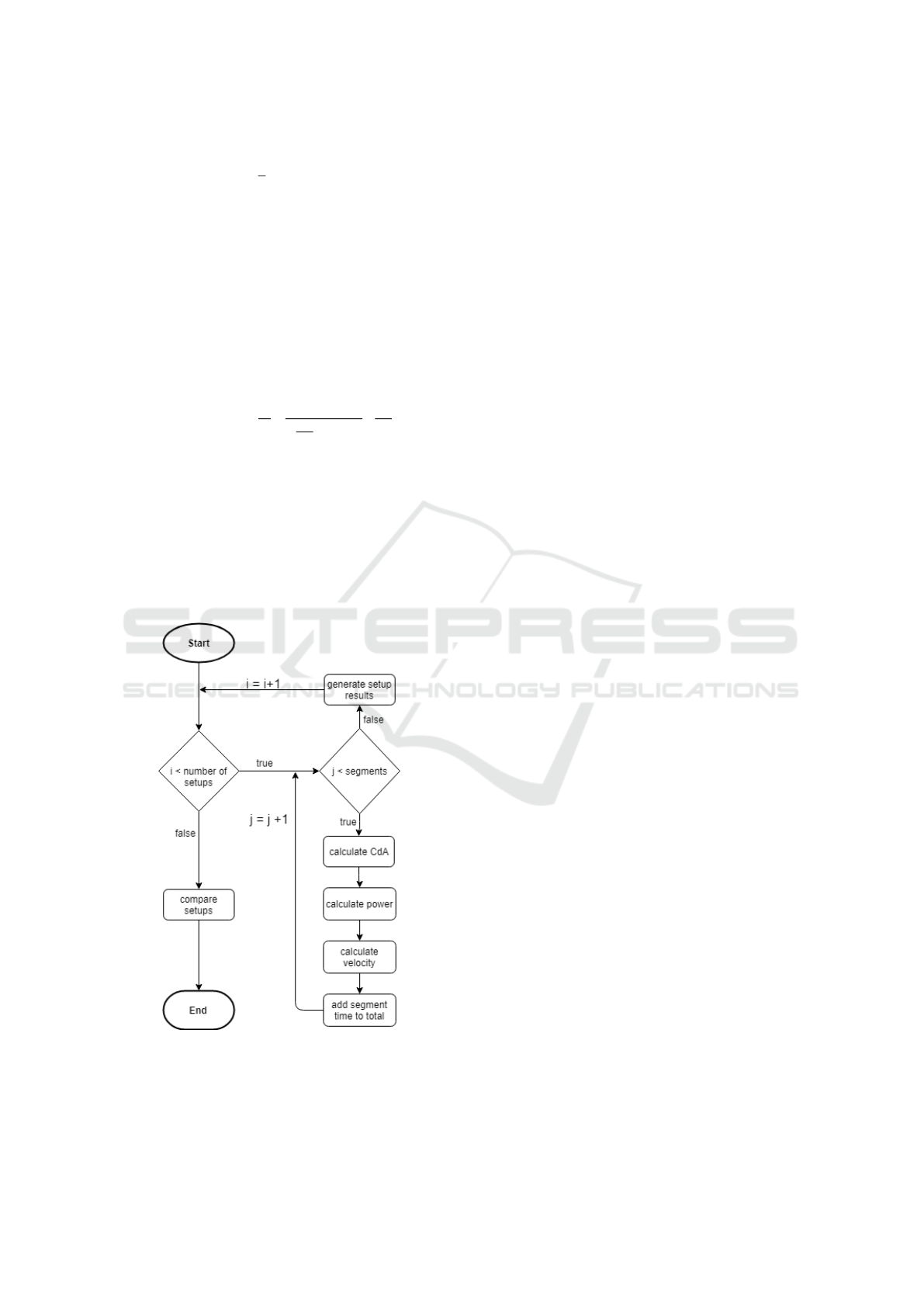
The logic of the simulation is illustrated in Figure 1,
where the total race time for each equipment setup and
the velocity profile is calculated.
Figure 1: Flowchart showing how the model is used in a
discrete context.
The following assumptions are made.
Weather Conditions. The wind speed- and direction
are assumed to be constant for the whole simula-
tion, making V
w, j
and θ
j
the same for every seg-
ment. In reality, atmospheric wind will always
be turbulent over a large range of length scales.
Small scale turbulence can alter the flow around
the cyclist compared to the low turbulent wind tun-
nel conditions. Large scale turbulence, also called
gustiness, will cause a instant shift in the C
D
A-
velocity-yaw set-point, and also, because of the
squared velocity dependency in the drag formula,
cause an underestimation of the simulated drag
force. Additionally, temperature and air pressure
are assumed constant for the whole simulation.
Turns and Braking. The model does not account for
braking and accelerating in and out of corners.
Brake patterns and turning technique varies from
corner to corner and rider to rider, thus no general
equation was implemented for this.
Power Input from Rider. Power input from the rider
is intended to be estimated from previous race data
as a function of road gradient. It is therefore as-
sumed that the rider will be able to deliver the same
power as defined in the power-gradient curve.
2.2 Wind Tunnel Measurements
Wind tunnel measurements of two test riders were per-
formed in the wind tunnel at the Norwegian university
of science and technology (NTNU) in Trondheim. The
wind tunnel has a test section cross-section of 2.7 x
1.8 meters (w x h) and the resulting blockage ratio was
> 10 %. A blockage correction factor based on CFD
simulations was applied to the measured data. A time
trial bike was fixed to a 6-component force balance
(Carl Schenck AG) supported by aerodynamic struts on
the fork and a bike trainer (Tacx Bushido) on the rear
hub. The free stream wind speed was measured with a
pitot-static tube, and the incoming wind speed was cor-
rected with the cosine of the yaw-angle for the yawed
test cases.
A comfortable time-trial position that could be
replicated in a field test was chosen by each rider and
the drag force along the bike axis was measured with
the rider pedaling at a steady cadence. The influence of
variation in cadence on aerodynamic drag was investi-
gated and found to be negligible. The drag of the bike
support was also measured and subtracted from the to-
tal drag. Due to the inherent uncertainty related to rider
position and pedaling, 3 measurements of 20 seconds
sampling time were made and averaged for each test
case. A visual feedback system, including a side view
camera and overlaid guide lines, was installed in the
wind tunnel in order to aid the test riders maintain the
same position for all test cases.
icSPORTS 2019 - 7th International Conference on Sport Sciences Research and Technology Support
78

The drag area of the full rider and bike setup was
measured at 5 different wind speeds ranging from 30
km/h to 70 km/h, and at 4 different yaw angles rang-
ing from 0 to 15 degrees. The resulting data-set cov-
ers the conditions most commonly experienced during
a flat time-trial. Drag values for simulated cases falling
outside of the measured data-set are set to the closest
measured value, but these cases are expected to be few
under normal race conditions.
2.3 Model Validation
2.3.1 Determination of Coefficients
The moment of inertia of the wheels, the rotational drag
coefficient of the wheels as well as power loss in wheel
bearings and chains were taken directly from (Martin
et al., 1998). The coefficient of rolling resistance was
retrieved from (XBits, 2016) for a tire model similar
to the one used on the test bike. The values are listed
below.
Moment of inertia of wheels: I = 0.14kg · m
2
Rotational drag coefficient: F
w
= 0.0044
Mechanical loss coefficient: E
C
= 0.976
Coefficient of rolling resistance: C
RR
= 0.00297
2.3.2 Field Test
Validation of the model’s accuracy was done by con-
ducting tests on a 6.8km course with both flat, uphill
and downhill sections. The C
D
A data-sets for the two
test riders from the wind tunnel was used in the sim-
ulations. Wind velocity and -direction, and tempera-
ture were measured on site, and the air pressure was
retrieved from the weather forecast of the day. Two
different test cases were chosen for each of the two test
riders, rider 1 testing two different skinsuits and rider
2 testing two different riding positions. The two riders
used the same TT-bike and -helmet. Total system mass
of the test riders and equipment was measured prior to
the test, as listed below.
Rider 1, Skinsuit 1: 92.9 kg
Rider 1, Skinsuit 2: 92.7 kg
Rider 2, Skinsuit 1: 92.7 kg
The course was ridden in both directions; south-
ward with 90m of climbing, and northwards with 19m
of climbing. Both with a net elevation gain and loss
of 72m respectively. The tests were done with a flying
start of 8.5m/s southwards and 12.5m/s northwards.
Test rider 1 rode four tests; both directions with two
different skinsuits. Test rider 2 did two tests south-
wards with Skinsuit 1; once seated in an aerodynamic
time trial position and one standing up in hills inclined
by more than 4%. The bike was equipped with a crank
arm based power meter (Stages Cycling LLC), allow-
ing the riders to pace their power output during the
test. The riders were instructed to follow the simulated
power curve shown in Figure 2.
Figure 2: Power curve used in the simulation and measured
power for Test rider 1 in Test 1.
The power output for 0% incline was set to 250W
with an increase of power per % increase in gradient of
3.2W . Elapsed time, velocity and gradient were mea-
sured with a Garmin Edge®820 bike computer as well
as two independent stopwatches.
The wind conditions varied along the course during
the field test. The northernmost 2.43km of the course
were exposed to wind while the remaining parts were
calm because of the surrounding terrain. Therefore, the
course was divided into a northern and southern sec-
tion, and the test was simulated in two steps; with wind
on the northern section, and with zero wind on the rest.
The two simulations were then merged. Additionally,
the simulations were run with both variable and con-
stant drag area, where the constant drag area was taken
from the average velocity of the test and zero yaw.
2.4 Subdivisions of Track Segments
A series of simulations of the southbound track was
done for Test rider 1 with Skinsuit 1 to find a reso-
lution of segments that yields stable results. Simula-
tions were done with a wind of 0m/s, and tested with
2, 5, 10, 20, 40, 80, 160, 320, 640 and 1280 subdivi-
sions of the segments. The default resolution from the
GPS-tracker used is 1s. Table 1 below shows simula-
tions with the corresponding total simulation time for
the different subdivisions.
From the convergence in the graph observed in the
table, as well as illustrated in Figure 3, it can be as-
sumed that the result from simulations will not change
for simulations with more than 1280 sub-segments.
From this, a simulation with 1280 sub-segments can
be defined as virtually accurate. An expression can
then be made for the relative simulation error with n
sub-segments as e
v
n
,rel
=
v
n
−v
1280
v
1280
, where v
1280
is the es-
Simulation Model for Road Cycling Time Trials with a Non-constant Drag Area
79
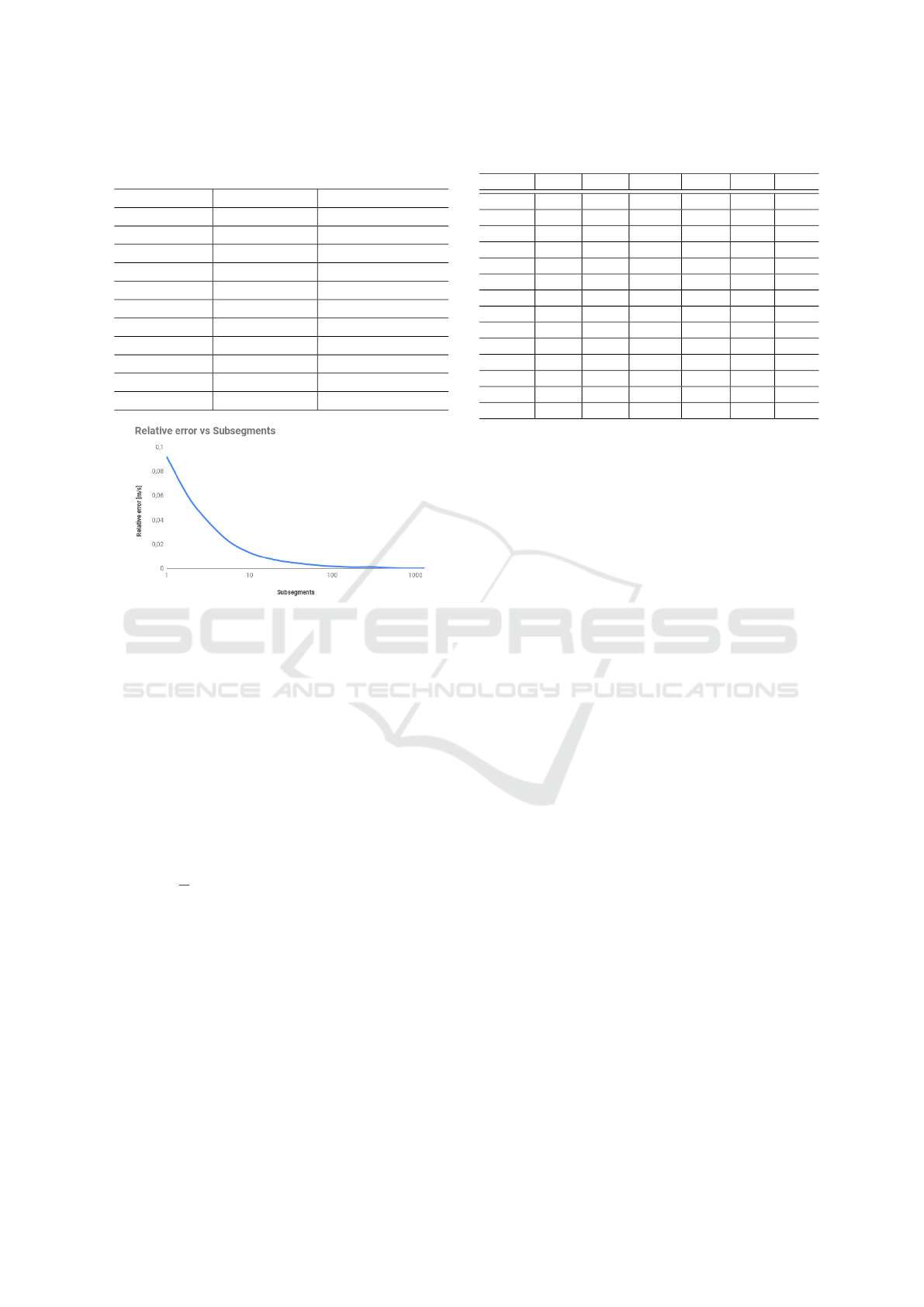
Table 1: Simulations of the southbound track for Test rider
1 with Skinsuit 1, wind velocity 0m/s.
Subdivisions Avg. Velocity Computation time
1 8.820 m/s 0.25 s
2 8.783 m/s 0.5 s
5 8.753 m/s 1.25 s
10 8.741 m/s 2.5 s
20 8.735 m/s 5 s
40 8.732 m/s 10 s
80 8.730 m/s 20 s
160 8.729 m/s 40 s
320 8.729 m/s 80 s
640 8.728 m/s 160 s
1280 8.728 m/s 320 s
Figure 3: Relative simulation error of average velocity vs.
number of sub-segments.
timated average velocity from the simulation with 1280
sub-segments.
Figure 3 shows that the relative error in simulation
decreases with an increase in subdivisions, and that the
results of the simulations converges monotonically. As
shown in Table 1, the simulation time increases with
the number of subdivisions. Therefore it is not desir-
able to choose a very high number of divisions, as the
gain in accuracy will be minimal compared to compu-
tational cost. The relative error for 40 sub-segments is
calculated to 0.05%, with an acceptable total computa-
tion time of approximately 10 seconds. Based on this,
a segment subdivision of 40, resulting in a segment res-
olution of
1
40
s, was chosen for the simulations.
3 RESULTS
The results of the validation test are summarized in Ta-
ble 2.
The mean absolute difference of the simulations is
3.22%. In Table 2, the symbols are defined as shown
below.
R: Test rider
S: Skinsuit
D: Direction of the test course
Table 2: Results of model validation.
Test 1 2 3 4 5 6
R 1 1 1 1 2 2
S 1 1 2 2 1 1
D S N S N S S
V
w
S 0 0 0 0 0 0
V
w
N 3.5 2 2 2 1 1
dir
w
NE N-NE N-NW N-NW N N
T 15 15 15 15 17 17
p 1018 1018 1018 1018 1018 1018
P 254 245 254 244 265 261
MAE
P
22.0 20.2 19.2 23.5 43.0 39.7
t
m
12:21 9:23 12:35 9:28 12:02 12:24
t
s
11:58 9:08 12:29 9:04 12:41 12:46
e
r
-3.2% -2.7% -0.82% -4.3% 5.4% 2.9%
t
sc
11:59 09:10 12:32 9:07 12:44 12:49
V
w
S: Wind velocity in the southern section [m/s]
V
w
N: Wind velocity in the northern section [m/s]
dir
w
: Wind direction [orientation]
T: Temperature [
◦
C]
p: Air pressure [hPa]
P: Average power [W]
MAE
P
: Mean absolute error of power [W]
t
m
: Measured time [min : sec]
t
s
: Simulated time [min : sec]
e
r
: Relative error between t
s
and t
m
t
sc
: Simulated time for a constant C
D
A [min : sec]
In Test 5 the time-trial position is retained through-
out the course, while in test 6 the rider used a standing
up position where the gradient exceeded 4%.
Figure 4, 5 and 6 shows the simulated velocity
plotted against the measured velocity along the test
course, in the southward direction. During the tests,
a delay in the gradient measured by the bike computer
was observed, meaning that when the gradient changes
quickly, such as in transitions into hills or over hilltops,
the measured gradient lags behind the terrain. This will
result in unrealistic simulated velocities on these sec-
tions of the course. Figure 5 also shows a drop in the
simulated velocity just before 1000 m. This is due to
the bike computer measuring a false gradient of 4-5%
over a short period at this point. Due to this, the drop
in velocity only shows up in the simulation and not in
the measured velocity.
4 DISCUSSION
As shown in Table 2, the simulated results deviate from
the actual time by 0.8%-5.4%. There are primarily
two sets of limitations that account for this deviation.
icSPORTS 2019 - 7th International Conference on Sport Sciences Research and Technology Support
80
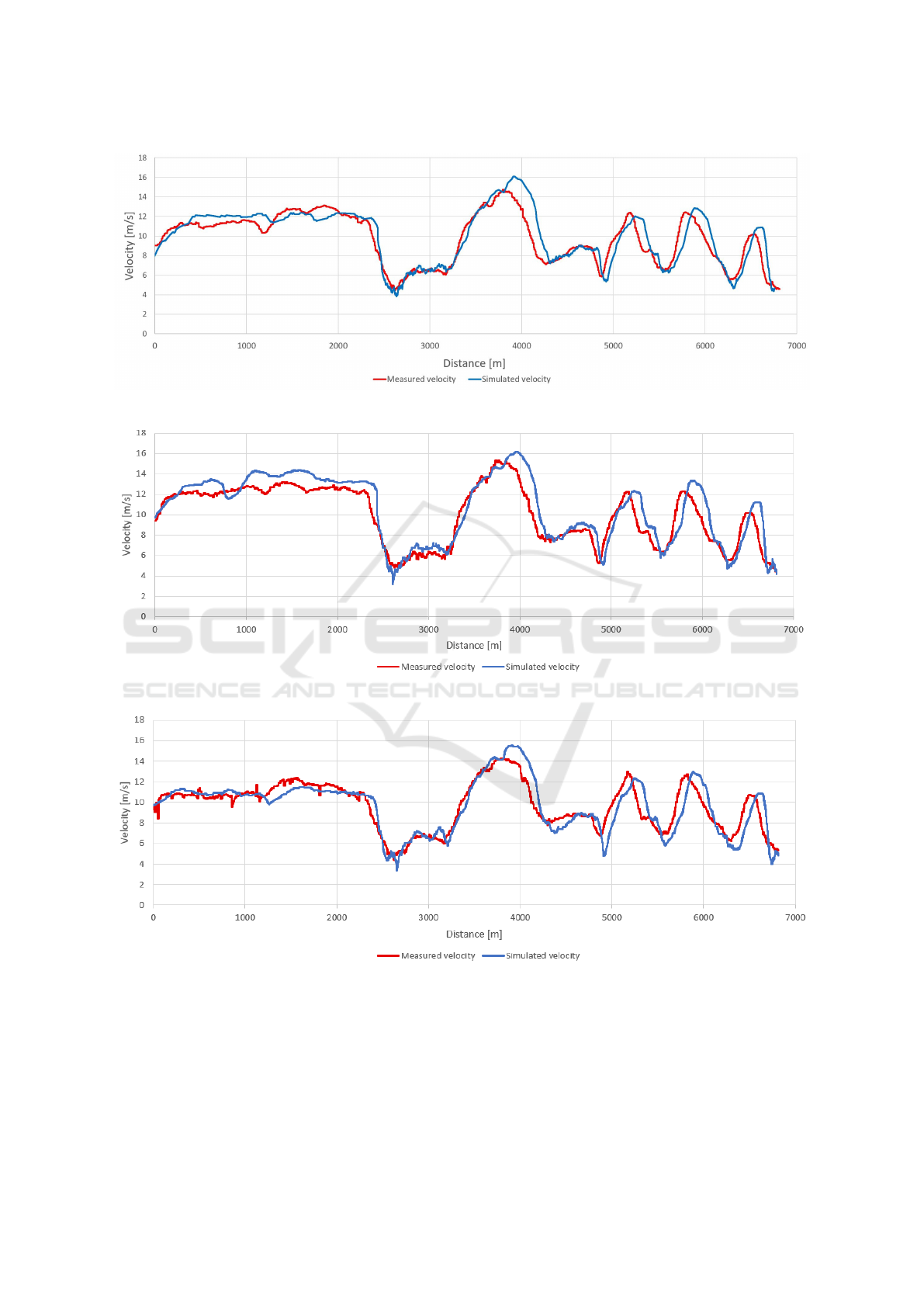
Figure 4: Simulated vs. measured velocity. Test rider 1, Skinsuit 2.
Figure 5: Simulated vs. measured velocity. Test rider 1, Skinsuit 1.
Figure 6: Simulated vs. measured velocity. Test rider 2, Skinsuit 1, standing position on hills.
One is the limitations of assumptions and simplifica-
tions that are made for the model. As mentioned in
Chapter 2.3.1, values for the coefficients for inertia in
the wheels, rotational drag of the wheels, mechanical
loss in wheel bearings and chains and rolling resistance
were retrieved from previous experiments by other au-
thors. Ideally these coefficients should have been mea-
sured for the actual setup used in the test. This uncer-
tainty could have various effects on the results. Fur-
thermore, wind speed and direction are assumed to be
constant for a full simulation. This involves a simpli-
fication of the actual test conditions, as some of the
test runs were susceptible to changes in wind. It was
however possible to limit this uncertainty by running
Simulation Model for Road Cycling Time Trials with a Non-constant Drag Area
81

separate simulations, dividing the course into two sec-
tions with clear difference in wind conditions. The
model does not consider braking and cornering, and
this can lead to an underestimation of simulated time
for courses with fast downhill sections and sharp turns.
The other set of limitations is the data input to the
model. The wind tunnel data were measured for the
head down position that a rider normally uses during
straight sections of the course, where much attention
to the road ahead is not needed. In the validation tests
as well as in a race, this will not always be possible, as
curves and uneven road surfaces forces the rider to raise
their head to scan the road ahead. This will cause the
simulated time to be lower than the real time at certain
points. However, the time spent in the aero-position
increases with the level of the cyclist and is large com-
pared to the time spent in deviating positions for most
races. It is shown by (Olds et al., 1995) that riders of
a higher level also have a higher discipline of pacing
and positioning while riding. As none of the test rid-
ers hold international level as cyclists, this effect of
this will be greater in the performed tests than for a
World Tour rider. Wind tunnel tests were conducted
for no lower than 8m/s and no greater than 20m/s. The
drag area was assumed constant for any velocities be-
low 8m/s and over 20m/s in the simulations. The va-
lidity of the assumption of a constant drag area is de-
pendant on equipment and position, but the drag area
is more likely to increase slightly for lower velocities
based on the trend in wind tunnel test results in the Ap-
pendix. Velocities below 8m/s were measured at some
points during climbs and this leads to an underestima-
tion of drag in these hills, thus slightly overestimating
the velocity in the simulation. Also a significant uncer-
tainty is related to the instantaneous power produced
by the test rider. Even though the average power was
fairly consistent between test runs, a random variation
around the predefined power curve must be expected.
The MAE
P
row in Table 2 shows that the mean average
error of power input ranged from 19.2 to 43 watts.
Also, the power-slope function developed for this
simulation was based on a small data set. Ideally, the
power functions should be based on personalized his-
torical performance data for similar race conditions and
duration. Another limiting factor of the power curve is
that it does not account for a third dimension, namely
the length of the race. The average power of a short
time trial is significantly higher than that of a long time
trial, and the power curve should be scaled accordingly.
It is shown in Figure 4 that the simulated velocity
deviates the most from the measured velocity in sec-
tions where there is a transition between high and low
velocity, typically where the gradient changes quickly,
as over a crest and in the transition into a hill. A de-
lay was observed in the gradients recorded by the GPS
computer. Due to this delay the simulation will pro-
duce unrealistic values in such sections of terrain tran-
sition. This results in the simulated velocity curve hav-
ing close to the same shape as the measured velocity
curve, but being shifted slightly to the right. The effect
is visible from the 4000m mark and onward in Figure
4. More accurate altitude data of the course should lead
to more accurate simulations.
Because the wind conditions varied in between the
test runs, it is hard to determine with certainty that one
equipment setup is indeed faster than the other. The
trends observed in the measurements do however in-
dicate that Skinsuit 1 is superior to Skinsuit 2 while
riding the course in both directions. When simulating
both setups against each other with equal conditions,
Skinsuit 1 is predicted to be the faster one of the two.
Additionally, the wind tunnel tests results in the Ap-
pendix show that Skinsuit 1 gives a lower drag coeffi-
cient than Skinsuit 2. This indicates that the model is
able to predict which of the setups is the fastest.
In Table 2, results from simulations with a con-
stant drag area are included. Based on the wind tun-
nel tests results shown in the Appendix, the drag area
will vary with velocity (and Reynolds number). The
general tendency in these tests was that the predicted
time became slightly higher with a constant drag area.
It is believed that time trials spanning a greater velocity
interval will lead to greater differences between simu-
lations with or without a changing drag area. This will
also depend largely on the velocity profile and shape
of the C
D
-velocity curve. For the two skinsuits tested
here, the shape of the C
D
-velocity curves do not inter-
sect and consequently Skinsuit 1 will give a higher ve-
locity throughout the course in both directions.
From the total of six tests that were conducted, the
mean absolute error of 3.22% was within the frame
of the objectives. Because of the low sample size, in
which every test was unique in form of a different rider,
equipment setup or course, there is not much basis to
name the statistical uncertainty of the simulations. Nor
are there enough empirical results to claim that this
model of prediction is any more accurate than previous
models. However, despite the difficulty of performing
accurate field tests involving human test subjects, the
test results indicate that the fastest setup identified from
the wind tunnel tests, is also faster on the road. Also,
given accurate input data, the model should be able to
predict the fastest setup for otherwise similar race con-
ditions.
5 CONCLUSIONS
Based on the experiments conducted in this paper, the
expanded model for predicting road cycling perfor-
mance may be used to identify the best equipment setup
for any given time trial and rider. Simulations of the
conducted field tests showed a mean absolute differ-
ence of 3.22%, which was within the range of previous
icSPORTS 2019 - 7th International Conference on Sport Sciences Research and Technology Support
82

studies. Further experiments and validation is required
to determine the statistical uncertainty of the model and
the sensitivity to the errors in the various input param-
eters.
ACKNOWLEDGEMENTS
We would like to express our gratitude to Team INEOS,
and Sondre Bergtun Auganæs of Centre for Sports Fa-
cilities and Technology at NTNU for their contribu-
tions and support throughout this project.
REFERENCES
Dahmen, T., Byshko, R., Saupe, D., R
¨
oder, M., and
Mantler, S. (2011). Validation of a model and a simu-
lator for road cycling on real tracks. Sports Engineer-
ing, 14(2):95–110.
Dahmen, T. and Saupe, D. (2011). Calibration of a power-
speed-model for road cycling using real power and
height data. International Journal of Computer Sci-
ence in Sport, 10:18–36.
E di Prampero, P., Cortili, G., Mognoni, P., and Saibene,
F. (1979). Equation of motion of a cyclist. Journal
of applied physiology: respiratory, environmental and
exercise physiology, 47:201–6.
Martin, J. C., Milliken, D. L., Cobb, J. E., McFadden, K. L.,
and Coggan, A. R. (1998). Validation of a mathemati-
cal model for road cycling power. JOURNAL OF AP-
PLIED BIOMECHANICS, 14(3):276–291.
Olds, T., Norton, K. I., and Craig, N. O. (1993). Mathemat-
ical model of cycling performance. Journal of applied
physiology, 75(2):730–7.
Olds, T. S., Norton, K. I., Lowe, E. L., Olive, S., Reay,
F., and Ly, S. (1995). Modeling road-cycling perfor-
mance. Journal of Applied Physiology, 78(4):1596–
1611. PMID: 7615475.
XBits, J. B. (2016). Tire test - continental grand prix
tt. https://www.bicyclerollingresistance.com/road-
bike-reviews/continental-grand-prix-tt-2016. Ac-
cessed on 09/04/2019.
APPENDIX
Drag area vs. velocity for Test rider 1 with skinsuit 1 and 2.
Simulation Model for Road Cycling Time Trials with a Non-constant Drag Area
83
