
Analysis of the CRAX Vulnerability Automatic Utilization Process
Zhao Chao
1
, Pan Zulie
1
, Huang Zhao
1
and Huang Hui
1
1
National University of Defense Technology, Anhui, China
Keywords: Symbolic execution, Automatic analysis, vulnerability.
Abstract: In recent years, the number of software vulnerabilities has been on the rise, and the harm of software
vulnerabilities has become more and more serious. However, there are so many software vulnerabilities that
simple manual analysis cannot meet the requirements. In view of the above problems, this paper introduces
CRAX. CRAX is a new framework based on symbolic execution. And it is to act as a backend of
static/dynamic program analyzers, bug finders, fuzzers, and crash report database. It can automatically,
efficiently and quickly analyze software vulnerabilities and generate stable and efficient test cases. The
paper analyzes CRAX's automatic analysis process of vulnerability program and the generation process of
test cases in detail, and in chapter 3 and chapter 4, it emphatically introduces the constraint construction and
reconstruction process in the process of CRAX's automatic analysis.
1 INTRODUCTION
Vulnerability is a defect in the specific
implementation of hardware, software, protocol or
system security policy, which enables an attacker to
access or break the system without authorization
(Yaquan, 2016). In recent years, the number of
software vulnerabilities has been on the rise. The
malicious Web attack events that software
vulnerabilities should be launched violate citizens'
rights and interests, spread a wide range of computer
viruses, cause major economic losses, and
implement advanced sustainable attacks to trigger
national security incidents (McGraw, 2016).
Therefore, software vulnerability analysis has
become a problem that cannot be ignored in the
computer field.
When the program crashes, the traditional
analysis is to manually analyze the availability of
crash so that it can determine whether the crash is
caused by internal logic errors or by external input.
If it is caused by external input, then it is likely to be
a very serious crash or even an exploitable
vulnerability. However, due to the numerous
software crashes, pure manual analysis has been
unable to meet the requirements, so how to quickly
and efficiently analyze the availability of crash has
become one of the key issues in the field of
vulnerability mining and analysis.
2 CRAX
At present, with the continuous development of
automatic program analysis, especially the
introduction of symbol execution, stain analysis and
other technologies into the fields of software crash
analysis and vulnerability mining, various software
vulnerability utilization automatic construction
technologies have been proposed (Liang and Purui,
2016). At IEEE S&P conference in 2008,
D.Brumley et al first proposed AEPG based on
patch comparison (Brumley and Poosankam, 2008).
At NDSS conference in 2011, T.Avgerinos et al first
proposed AEG based on source code analysis
(Avgerinos and Cha, 2011). On the basis of AEG
technology, in 2012 IEEE conference, Huang
Shikun et al proposed the automation framework
CRAX based on AEG method improvement.
Based on S2E (Chipounov and Kuznetsov, 2011)
environment model, KLEE (Cadar and Dunbar,
2008) symbol virtual machine and QEMU (Bellard,
2005) processing simulator, this framework is a new
platform for symbol execution. To generate control
flow hijack attacks, CRAX focuses on symbolized
EIP, registers, and Pointers. A systematic method is
32
Chao, Z., Zulie, P., Zhao, H. and Hui, H.
Analysis of the CRAX Vulnerability Automatic Utilization Process.
DOI: 10.5220/0008097100320037
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 32-37
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
proposed to search the maximum continuous symbol
memory for payload injection.
3 BUILD CONSTRAINT
In the automatic analysis and utilization of the
program, CRAX first determines the availability of
the program. If the EIP of the program can be
overwritten, the risk of the program is determined. If
the determination program has available risks,
CRAX transfer to the available constraint building
and solving process. In the process of building a
constraint, CRAX first looks for a large section of
the continuous symbolic area, and then tries to
construct an input which can cause overflow and
hijack the control flow. Through input, CRAX can
build shellcode constraints、nop constraints and eip
constraints. After successful construction, CRAX
combine shellcode constraints, eip constraints, nop
constraints, and the path constraints, if the result is
true, then it indicates that the constraint is
constructed successfully, and the code distributes
after the constraint is constructed successfully is
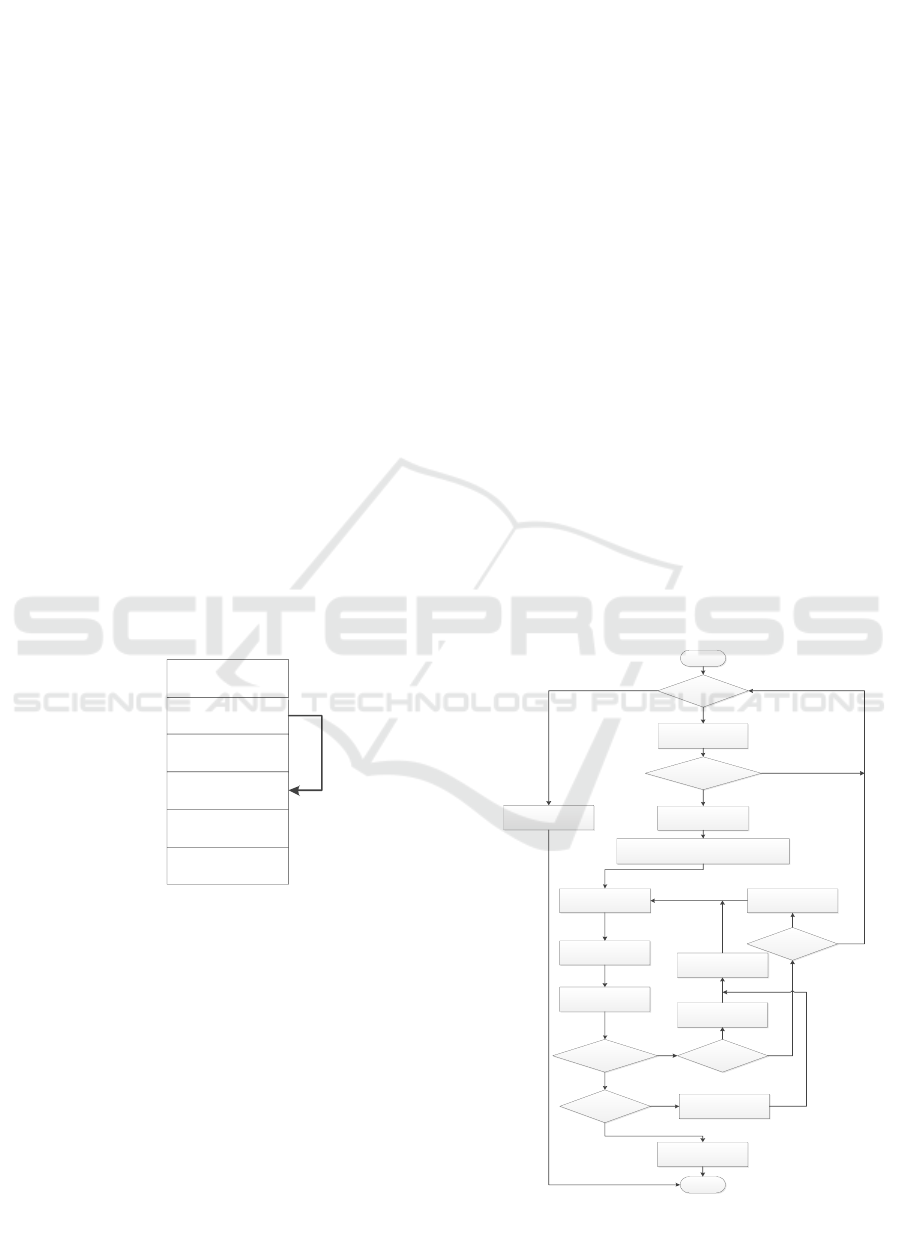
shown in figure 1. The symbolic area grows from
low address to high address, and shellcode is
arranged at the bottom of the symbolized area:
retur n addr ess
...
nop
shellcode
......
Figure 1: The code distribution after a successful
constraint building.
1. Build shellcode constraint: Overlay a
contiguous symbolic area with the specified
shellcode that implements specific functions.
2. Build nop constraint: Arrange a large section of
nop in front of shellcode so that it doesn't affect
shellcode's functionality, meanwhile it can
increases the chances that the IP registers jump
to shellcode.
3. Build eip constraint: Overwrite the value of the
IP register as the specified value, so that EIP
can jump directly to the nop area or to the start
address of shellcode after the program flow
hijacking is successful. When the vulnerability
is triggered and the program flow is hijacked,
the program can jump to the nop area and
execute a long section of nop and then execute
shellcode, or jump directly to the shellcode
starting address to execute shellcode, thus
completing the specified function of the attacker.
4. Path constraint: The condition required for
memory placement to be met when the
specified location is overridden by the input to
the specified code.
Therefore, CRAX constructed shellcode
constraint, nop constraint, and eip constraint on the
shellcode area, nop area, and the affected IP register
area, and respectively combined the three constraints
with path constraint to form a harness code
constraint named exploit constraint that directly
overrides the return address-type vulnerability
utilization with a fixed address.
Only when there is a solution to the exploit
constraint, the availability of the target program is
considered to be true, and further constraint
simplification and constraint solving are conducted
to obtain the target program utilizing code. The
specific construction process is shown in figure 2:
Begin
All symbol r egions are
tr aver sed?
N
Select the current symbol area
and compar e i ts space size to
shellcode length
The symbol area length
is gr eater than or equal to the
shellcode length?
N
Tr y to arr ange the shellcode at
the end of the curr ent symbol
area
Initialize nopAttempt and fail edPivot as the start addr ess of
the symbol area, and successPivot as the st art address of
shellcode
Build shellcode const r aint
Build eip constraint
Update and deter mine
whether the expl oit const r aint
is solvable?
successPivot-
failedPivot<=1
successPivot=nopAttempt
Resolve the constraints and
solve the constraints, and get
the f inal exploit code.
Ar r ange shel lcode ahead
The shellcode start
address is equal to the sign
area start?
failedPivot=nopAtt empt
curr ent starting point cannot be
automatically utilized
Y
End
Y
Y
N
N
N
Y
nopAttempt=
(successPivot+failedPi vot)/2
Y
successPivot-
failedPivot<=1
N
Y
Build nop const raint between
nopAttempt and shellcode start
address
Figure 2: Constraints construct flow diagrams.
Analysis of the CRAX Vulnerability Automatic Utilization Process
33
3.1 Shellcode Constraint
The shellcode constraint is used to constrain the
arrangement of shellcode in the symbolized area. In
order to find an appropriate size memory area in the
memory space, CRAX finds areas that can be
affected by external input and records these
continuous symbol memory areas by symbolizing
the external input and by tracking the data flow. In
these continuous symbolic memory areas, the
contents of a specified memory area can be
overwritten as long as a specific data stream is built
as an external input. Then, in each continuous
memory area, CRAX writes the shellcode of specific
function into memory byte by byte and builds the
shellcode constraint until it succeeds in a certain
memory area. The ultimate result of constraint
solving is to write the shellcode for specific
functions in the specified symbol area through
external input.
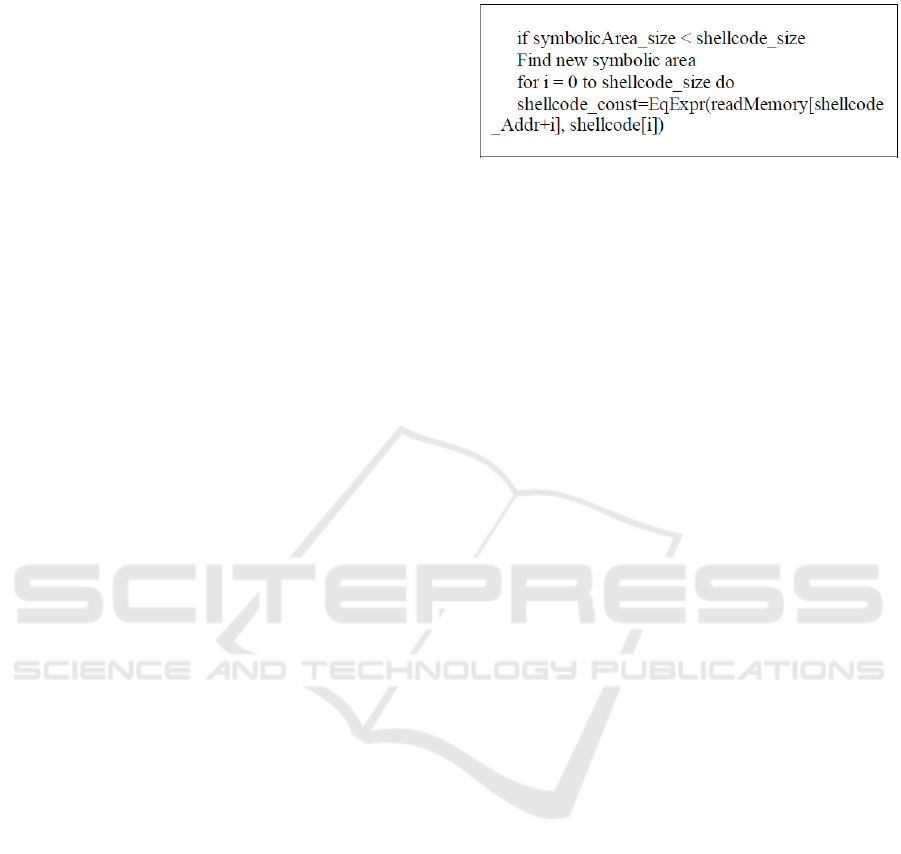
Before constructing the shellcode constraint in
the symbol memory area, the relationship between
the size of the current symbol memory area and the
length of the shellcode to be written is first
compared. If the size of the current symbol memory
area is less than the length of shellcode, it indicates
that the current symbol memory area is too small to
arrange the shellcode to be written. It means the
shellcode constraint builds failed this time, and need
to look for new symbol memory areas for the next
constraint build attempt; If the current symbol
memory area is greater than the length of shellcode,
it indicates that the symbol memory area is large
enough for shellcode to further try the shellcode
constraint construction.
When building shellcode constraint, CRAX
places the shellcode at the end of the symbolic
memory area.
After determining the area used to arrange
shellcode, the constraint is constructed word by
word, forming a constraint to determine whether the
value of the corresponding memory area used to
store shellcode can be equal to the byte at the
corresponding offset in shellcode. The specific
shellcode constraint build process is shown in table
1:
Table 1: The process of building shellcode constraint.
3.2 Nop Constraint
The nop constraint is the constraint used to populate
the nop instruction value between the shellcode
starting address and the start address of the symbol
memory area. Nop instructions are "empty
instructions," meaning that the execution of an
instruction does not change the register accessible to
any program, the processor status flag, or main
memory. The machine code is 0x90 under x86
conditions. Therefore, nop instruction does not
produce any actual execution effect except that it
takes up some memory and requires little execution
time. In the process of constructing the constraint,
the main purpose of building the nop constraint is to
increase the coverage of nop, so that the modified IP
register can jump to the area domain with greater
probability, and then to the shellcode area.
The introduction of the nop constraint is mainly
to make the value of the overriding return address
not necessarily a fixed value of the shellcode start
address, but any value between the start address of
the nop area and the start address of the shellcode
start address, so that the shellcode can eventually be
executed. In this way, the flexibility of code
utilization is improved, the value range of the
returned address is improved, and the possibility of
solving eip constraint is also improved.
In order to maximize the range of data values
used to cover the returned addresses, we need to
start from the shellcode starting address, to the start
address of the symbol memory area, and arrange the
continuous nop area as much as possible. For this
reason, CRAX tries to arrange the largest nop area
using dichotomy before the shellcode start address,
from the start address of the current symbol area to
the start address of the shellcode. Then CRAX
constructs the constraint byte by byte which
determines whether the nop block can be equal to
"\x90", and then combine to form the corresponding
nop constraint. The nop constraint build process is
shown in table 2:
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
34
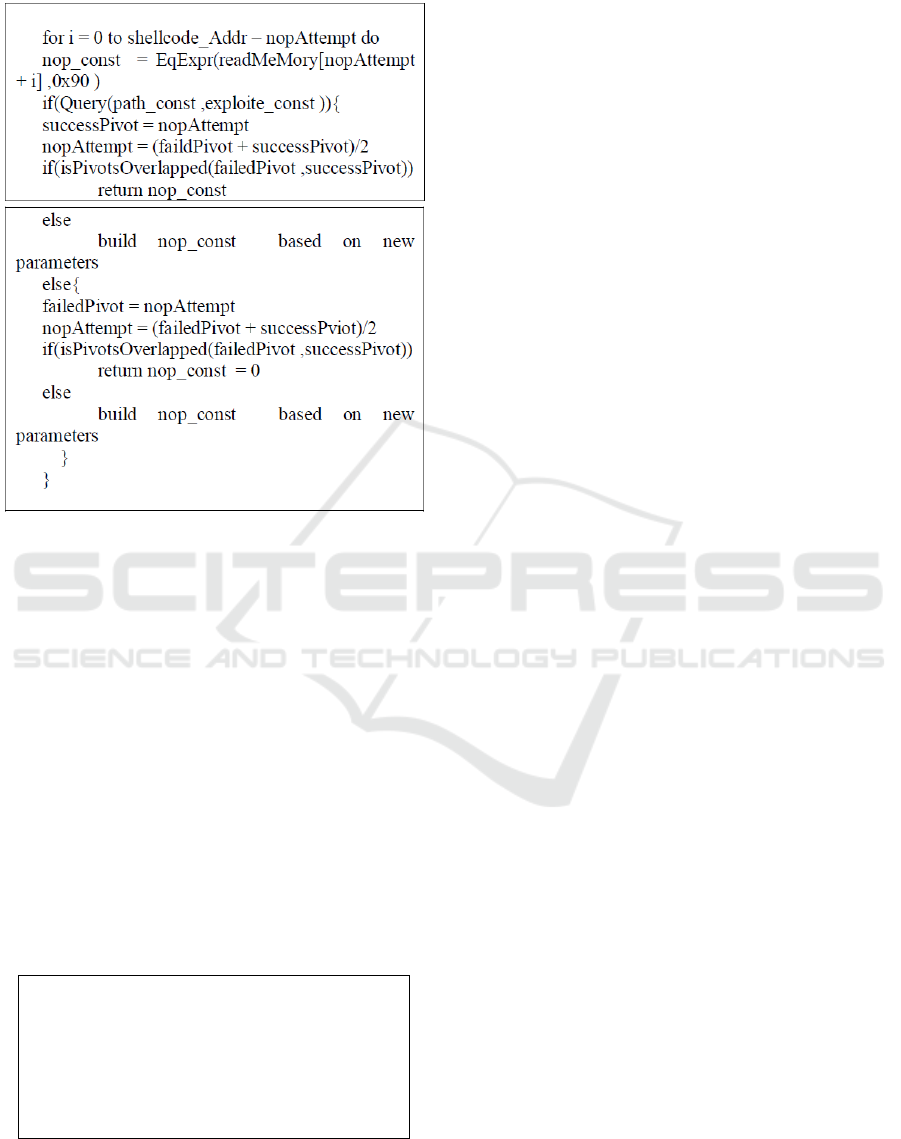
Table 2: The process of building nop constraint.
3.3 Eip Constraint
The eip constraint is the constraint on the IP register
value when the control flow hijacking occurs. Since
the value of the IP register is the address of the next
instruction to be executed by the CPU, a constraint
needs to be built to form a constraint on the value
stored in the IP register after the control flow
hijacking, so that the value points to any address
between the start address of the nop area and the
start address of shellcode. After the program returns,
the program flow will jump to the nop area or
directly to the shellcode starting address for
execution.
The eip constraint build process is shown in table
3:
Table 3: The process of building eip constraint.
lowerBound = nopAttempt
upperBound = shellcode_Addr
eipConstraint = AndExpr (UgeExpr
( m_eipValue ,lowerBound),
UleExpr(m_eipValue ,upperBound ));
4 CONSTRAINT REBUILDING
The exploitability constraints built on shellcode
constraint、nop constraint and eip constraint may
fail to combine with the path constraint due to bad
characters or conflict with the path constraint.
However the current constraint solving failure does
not necessarily mean the automatic generation of
utilizing code failure. The fact that no solution for
the current constraint actually represents the kind of
data layout corresponding to the current constraint is
not feasible. It is usually caused by conflict with the
current path constraint and other reasons. Therefore,
it can maintain the original function and avoid
conflict with the current path constraint by adjusting
the arrangement of data, so as to obtain the final use
code.
In fact, CRAX expects to automatically get a
utilization code that can jump directly to shellcode
through the nop area and give the largest possible
nop area in the final utilization code, that is, as many
nop empty instruction values as possible before the
shellcode without conflict with other constraints.
Therefore, it is necessary to adjust the constraint
after the construction of the constraint and judge the
resolvability after the reconstruction. This process of
adjusting and rebuilding constraints is called
constraint rebuilding.
4.1 Rebuild Shellcode Constraint
For the shellcode constraint, after the construction of
the constraint is completed, if the solution of the
exploit constraint fails, since the initial shellcode is
started at the end of the current symbol memory area,
then consider adjusting the position of shellcode
constraint when constructing the shellcode
constraint. If the starting position of shellcode is not
equal to the starting position of the current symbol
area, move shellcode forward by a byte and rebuild
the other constraint until the exploit constraint has a
solution; If the shellcode start location has been
aligned with the start address of the current symbol
area, but is still unsolvable, the current symbol
memory area is determined to be unavailable. Try to
find a new symbol memory area and start
constructing the constraint again until it is solvable
and available code; If all symbol memory areas are
tried and still unsolved, the current program is
determined not to be automatically utilized
Analysis of the CRAX Vulnerability Automatic Utilization Process
35

4.2 Rebuild Nop Constraint
For the nop constraint, in order to make the nop area
in the code as large as possible, CRAX uses
dichotomy to gradually determine the nop area step
by step between the start address of the symbolic
memory area and the start address of shellcode.
1. When the constraint is first constructed, try to
arrange all the nop between the symbolic memory
area and the shellcode starting address, that is, the
initial before endpoint and after endpoint used in the
record dichotomy are low= symbolicArea
_startAddr, high= shellcodeaddress-1, and the nop
area starting address is nopAttempt= symbolicArea
_startAddr.
2. Try to construct a constraint that sets all
contents from nopAttempt to high as nop, and add
nop constraint to exploit constraint. After building
exploit constraint, determining the solubility of the
result with the combination of exploit constraint and
path constraint.
3. If the decision result is solvable, it indicates
that under the current condition, all nop areas can be
covered as nop. Try to use dichotomy to expand nop
interval, so determine whether abs(high-low) <= 1.
If not, the nop area still can expand. Make
successPivot = nopAttempt, nopAttempt =
(failedPivot + successPivot)/2, and then go to step 2.
If true, the nop area cannot be expanded, then
nop_constraint is returned.
4. If the decision result is unsolved, in the
current condition, the number of bytes in the nop
area cannot be assigned to the nop, so try to narrow
down the nop interval by using the dichotomy.
Determine whether the condition abs(high - low)<=1
is true. If not, make low=nopAttempt,
nopAttempt=(low+ high)/2, and then go to step 2 to
construct the nop constraint. If the condition is true,
it returns nop_constrait 0.
4.3 Rebuild Eip Constraint
1. For eip constraint, if the nop constraint is not
empty, try to make the value used to cover the ip
register within the nop area, or point directly to the
shellcode starting address, and construct the
corresponding constraint accordingly. If the nop
constraint is empty, try to directly builds constraints
that make the ip register equal to the shellcode start
address.
2. If eip constraint is added to exploit constraint
determine whether there is a solution to the exploit
constraint. If yes, try to determine the maximum
range that nop area can obtain by dichotomy, that is
to advance the start address of nop area by
dichotomy. Make high=nopAttempt,
nopAttempt=(low+high)/2, and determine whether
the end of dichotomy condition abs(high-low) <= 1
is true. If it is true, then the exploit constraint is the
final constraint and constraint building has solution;
then simplifing the constraint and solving the
constraint by the constraint solver, the final
vulnerability exploit constraint code can be obtained.
If the end condition of dichotomy is not true, try
again to construct the nop constraint in 2 according
to the new high, low and nopAttempt values.
3. If the exploit constraint obtained in 2 is
determined to be unsolved after solving, it means
that the eip constraint cannot fall within the nop area
or directly points to the shellcode starting address.
Then, it is considered that whether the nop area
space can be expanded by dichotomy to expand the
feasible range of eip constraint. Then, the start
address of nop area is brought forward to make
high=nopAttempt, nopAttempt=(low+high)/2, and
then judge whether the condition abs(high-low)<= 1
is true. If it is not true, the nop constraint is
reconstructed again according to the new high, low
and nopAttempt values. If true, when reaching end
but there is no feasible solution, go to step 1, move
the shellcode start address one ahead, and rebuild
the shellcode constraint.
5 CONCLUSION
CRAX is an automatic development and generation
framework based on S2E. In order to generate
control flow hijacking attacks, it focuses on
symbolized EIP, registers, and pointers, and propose
a systematic method for searching maximum
contiguous symbolic memory for payload injection.
Experiments on various vulnerable sample codes
show that CRAX can handle different types of
control flow hijacking vulnerabilities. At the same
time, it analyzed and utilized the vulnerability faster
and more efficiently than manual debugging. CRAX
is also a viable and powerful development tool for
real-world environments.
But CRAX has limitations. First of all, it mainly
focuses on the automated analysis of stack overflow
vulnerability, while the automated analysis of heap
overflow vulnerability remains to be studied.
Secondly, it does not consider the influence of
ASLR, DEP and other protection mechanisms on
automatic analysis.
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
36

REFERENCES
Lin Yaquan. , 2016. War on Vulnerability. Beijing:
Electronic Industry Press.
McGraw, G. , 2016. Software security: Building Security
In. Boston, MA: Addtion-Wesley Professional.
Liang, H. , Purui, S. , 2016. Research Progress of
Software Vulnerability Automatic Utilization. China
Education Network.
Brumley, D. , Poosankam, P. , Song, D. X. , & Zheng, J. .
2008. Automatic Patch-Based Exploit Generation is
Possible: Techniques and Implications. IEEE
Symposium on Security & Privacy. IEEE.
Avgerinos, T. , Cha, S, K. , Tao, B, L, T. , Brumley, D. ,
2011. AEG:Automatic Exploit Generation. In
Proceedings of the Networkand Distributed System
Security Symposium (NDSS).
Chipounov, V. , Kuznetsov, V. , Candea, G. , 2011. “S2E:
a platformfor in-vivo multi-path analysis of software
systems,” in Proceedings of the 16th International
Conference on ArchitecturalSupport for Programming
Languages and Operating Systems(ASPLOS’11),
Newport Beach, CA, USA.
Cadar, C. , Dunbar, D. , Engler, D, R. 2008. “KLEE:
Unassistedand Automatic Generation of High-
Coverage Tests for Complex Systems Programs,” in
Proceedings of the 8th USENIXSymposium on
Operating Systems Design and
Implementation(OSDI’08), San Diego, California,
USA.
Bellard, F. , 2005. “QEMU, a fast and portable dynamic
translator,”in Proceedings of the FREENIX Track:
2005 USENIX AnnualTechnical Conference,
Anaheim, CA, USA.
Analysis of the CRAX Vulnerability Automatic Utilization Process
37
