
Vessel Detecting using Restrict Single Shot Multibox Detector for
Intravascular Ultrasounds
Zujie Liu
1
, Zuheng Liu
2
, Yunfeng Peng
1
, and Yanni Guo
1
1
School of Computer and Communication Engineering, University of Science and Technology Beijing, Beijing,China
2
State Key Laboratory of Organ Failure Research, Nanfang Hospital, Southern Medical University,Guangzhou,China
Keywords: Intravascular ultrasounds(IVUS), Vessel detecting, Restrict Single Shot MultiBox Detector
Abstract: Intravascular ultrasounds (IVUS) is a technique in scanning coronary artery, which is extensively used in
interventional therapy and it can provide valuable clues in detecting coronary plaques. Nevertheless, up to
now, most of the image frames of IVUS are manually examined by physicians. In this paper we designed a
restrict single shot multibox detector(R-SSD) method to automatically locate the regions of interests, e.g.
vessel, for computer-aided IVUS examination, by changing the initial feature extraction network and
restricting the range of prior box of original SSD method dedicated for object recognition. The accuracy on
locating vessel can achieve 95.4% using the proposed R-SSD.
1 INTRODUCTION
In recent years, the incidence of coronary artery
disease is increasing due to various unhealthy
lifestyle and aging population throughout world.
Coronary artery disease is an outcome of
atherosclerotic, because of vascular stenosis or
obstruction, resulting in myocardial ischemia or
myocardial infarction (MI). The rupture of
atherosclerotic plaques will probably lead to MI,
which is a disease with high mortality in clinical
practice. Most MI patients need expensive
interventional treatment immediately and are
probably required to perform IVUS to improve the
accuracy and security of intervention operation.
Rapid diagnosis and treatment will greatly improve
the prognosis and survival rate of MI patients.
However, dramatically increased emergency
operation and workload will probably lead to
inevitable fatigue even for skilled physicians, which
will increase the risk of surgery.
To alleviate the repeated medical workloads for
physicians on the assessment of coronary
angiography, Computer-aided image object
detection is now cast a new light on machine aided
IVUS image analysis on coronary artery
angiography.
Traditional object detection method is usually a
brute force algorithm to search the objects using
windows with different size sliding from right to
left, and from up to down in a image frame, which is
low-efficiency.
Some machine learning algorithms such as
support vector machine(SVM) and random
forest(RF), have been used for binary classification
of high risk from low risk vessel(Tadashi et al, 2016)
(Sheet et al, 2014). The features inputted to these
machine learning algorithm are extracted from IVUS
images using statistic methods. By combing with
deep learning mechanisms, convolution neural
network(CNN) can automatically extract features
from images and classify these images (Krizhevsky
et al, 2012).
R-CNN(Ross et al, 2014) and Fast-R-CNN
(Girshick, 2015) are proposed base on selective
search(Uijlings et al, 2013) which combine
neighboring pixels as a group by calculating the
similarity of each region. The selective searching are
based on outside region proposal method, and its
processing capacity is still slow. After that, a region
proposal network(RPN) is proposed to replace
selective searching to be Faster-R-CNN(Ren et al,
2017). However, They, i.e.,R-CNN, Fast-R-CNN
and Faster-R-CNN, are two-stage object detection
and will spend more time in region proposal. The
single shot detection(SSD) method(Liu et al, 2016)
is a one-stage object detection and is expected to
efficiently solve the region proposal problem.
18
Liu, Z., Liu, Z., Peng, Y. and Guo, Y.
Vessel Detecting using Restrict Single Shot Multibox Detector for Intravascular Ultrasounds.
DOI: 10.5220/0008096500180023
In Proceedings of the International Conference on Advances in Computer Technology, Information Science and Communications (CTISC 2019), pages 18-23
ISBN: 978-989-758-357-5
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
In this paper , based on CNN, we design a
restrict single shot multibox detector, called R-SSD,
which is improved from the existing SSD in(Liu et
al,2016) by changing the base network and restrict
the range of prior box. Our restrict single shot
multibox detector (R-SSD) are appropriate for vessel
detecting with high accuracy on locating vessel at
95.4% for IVUS analysis.
2 METHODS AND MATERIAL
2.1 Images Acquisition
Figure 1: Example of a IVUS image.
Coronary angiogram examination is done by radial
artery approach, while a 6-French guiding catheter is
used to selectively cannulate the ostium of the target
coronary artery. A guiding shot is taken after
administering a weight-adjusted dose of
unfractionated heparin and nitroglycerin (200ug).
Immediately after guidewire advancement, while
before balloon predilation, a 20-MHz, 2.9-Fench
IVUS-catheter is inserted into the target coronary
arteries lesion. Then the IVUS-catheter is
automatically pulled back to the coronary ostium at
0.5mm/s using an automated pull-back device.
During Pull-back, all IVUS images are recorded and
stored.
These process are performed by physicians from
Nanfang hospital, Southern medical university. An
example IVUS image is illustrated in Figure 1.
2.2 Object Detection Method
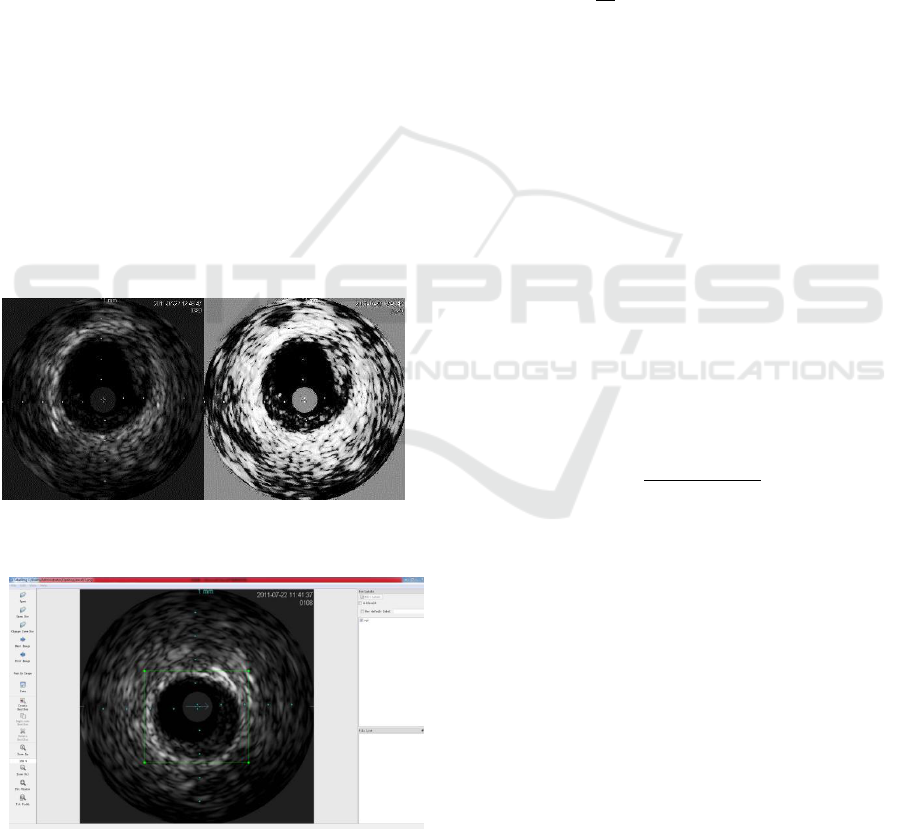
In the original SSD method(Liu et al,2016), as
shown in Figure 2, images firstly go through a
classification network (Howard et al,2017) where its
last two full-connection layer are changed into four
CNN layers to extract features; and then the Feature
Pyramid structures like conv4-3, conv-7(FC7),
conv6-2, conv7-2,conv8_2 and conv9_2 are used to
generate prior box on different feature maps, so to
make classification as well as location regression by
using double 3*3 convolution kernel to output 5
value. One is for confidence which generate 2
classification, e.g., vessel and background, and the
other one is for localization where each default box
generate 4 value. Because SSD method do not have
the process of region proposal and use feature
pyramid detection method, its speed is high and its
accuracy is almost reaching that of Faster-RCNN.
However, the area of vessel in IVUS almost
greater than 25% and medical equipment may be
portable. So the restrict SSD method (R-SSD) is
designed by replacing the base network of original
SSD to MobileNet for feature extraction which is
lightweight and could be embedded into portable
equipment. On the other hand, the range of prior box
for original SSD is 0.2-0.9. Because they have small
box to detect and consider the area of vessel, we
Figure 2: The network of SSD.
Vessel Detecting using Restrict Single Shot Multibox Detector for Intravascular Ultrasounds
19
restrict the range of 0.4-0.95 for vessel detection in
R-SSD.
3 EXPERIMENT
3.1 Date Sampling and Pretreatment
We use OpenCV to sampling the video at 10 frames
per second and 4200 images (pic1) are obtained.
After sampling, the images are turned into gray scale
firstly and then divided into train set (3300 images)
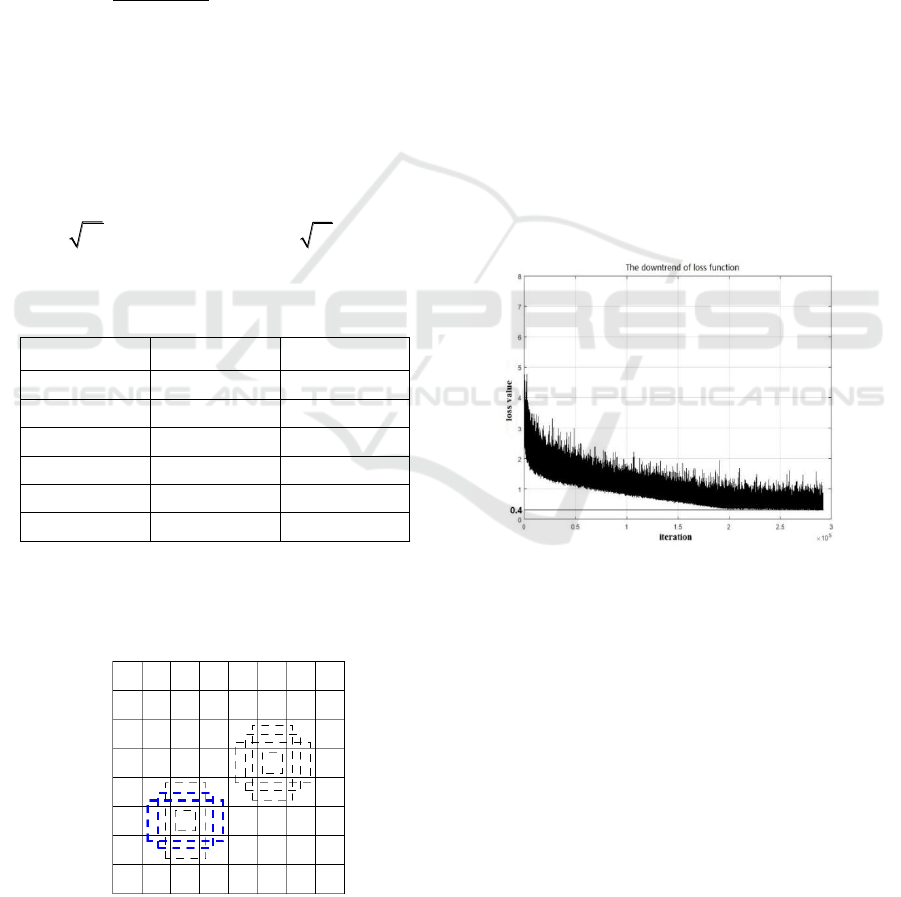
and test set (900 images). Furthermore, as shown in
Figure 3 and 4, we use Gaussian Filter and
Histogram Equalization to pre-process the image
and then use LabelImg to label the vessel. The vessel
ROIs (region of interest) are marked and a set of 4-
tuples parameters(x, y, w, h) are achieved to describe
positions of the vessel, where x and y denotes the
coordinate for the central of the box, w and h
denotes the width and height of the box.
Each labelled image is translated into a xml file.
After all images are labeled, the xml file is saved
into a csv form. Because Tensorflow is used in this
paper to train model, the csv form and gray scale
image are transferred into tfrecord format.
Figure 3: The different between original IVUS image and
after preprocess.
Figure 4: The usage of LabelImg.
3.2 Training
In this paper, the SSD object detection models are
trained using Tensorflow, via following four-steps:
setting the training objective, matching strategy,
generating prior box, and training parameters.
Step 1: setting the training objective.
We derive and extend the SSD training objective
from the Multibox (Erhan et al, 2014) to handle
multiple object categories. The overall objective loss
function is a weighted sum of the localization loss
(loc) and the confidence loss (conf):
1
( , , , ) ( ( , ) ( , , ))
conf loc
L x c l g L x c L x l g
N
(1)
Where N is the number of matched default
boxes. If N = 0, we set the loss to 0. The localization
loss is a Smooth L1 loss between the predicted box
(l) and the ground truth box (g) parameters. Similar
to Faster-RCNN, we regress to offsets for the center
(cx, cy) of the default bounding box(d) and for its
width(w) and height(h).
1
, , ,
( , , ) ( )
m
N
km
loc ij L i
j
i Pos
m cx cy w h
L x l g x smooth l
g
(2)
The confidence loss is the softmax loss over
multiple classes confidences(c).
( , ) log( ) log( )
N
p p o
conf ij i i
i Pos i Neg
L x c x c c
(3)
Where
exp( )
exp( )
p
p
i
i
p
i
p
c
c
c
(4)
and the weight term α is set to 1 by cross validation.
Step 2: matching strategy.
During training, we need to determine which
default boxes correspond to a ground truth detection
and to train the network accordingly. We therefore
select each ground truth box from default boxes that
vary over location, aspect ratio, and scale. So that
each ground truth box is matched to the default box
with the best jaccard overlap, e.g. IOU. Unlike that
for MultiBox, we here match default boxes to any
ground truth with jaccard overlap higher than a
threshold (0.5) (Liu et al, 2016). This method can
simplify the learning problem, by allowing the
network to predict high scores for multiple
overlapping default boxes rather than requiring it to
pick only the one with maximum overlap (Erhan et
al, 2014).
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
20
Step 3: generating prior box.
Empirically, feature maps from different levels
within a network are known to have different
receptive field sizes. Fortunately, within the SSD
framework, the default boxes do not necessary need
to correspond to the actual receptive fields of each
layer (He et al, 2015). We design the tiling of default
boxes, so that specific feature maps can learn to be
responsive to particular scales of the objects (Zhou
et al, 2015). Suppose we want to use m feature maps
for prediction. The scale of the default boxes for
each feature map can be expressed by:
max min
min
+ ( 1), 1,
1
k
SS
S S k k m
m
(5)
where
min
S
is 0.2 and
max
S
is 0.9 in original SSD.
However, the vessel in IVUS would not be too small,
so
min
S
is set to 0.4,
max
S
is set to 0.9 or 0.95(as
shown in Table 1) in our method to promote the
performance. We also impose different aspect ratios (
r
a
) for the default boxes an compute the width(
a
k k r
w s a
) and height(
/
a
k k r
h s a
) for each
default box.
Table 1: The range of box.
Smin, Smax
0.4-0.9
0.4-0.95
S1
0.4
0.4
S2
0.5
0.51
S3
0.6
0.62
S4
0.7
0.73
S5
0.8
0.84
S6
0.9
0.95
As shown in Figure 5, by combining predictions
for all default boxes with different scales and aspect
ratios from all locations of feature maps, we have a
diverse set of predictions, covering various input
object sizes and shapes.
Figure 5: The prior box for each feature map cells.
Step 4: training parameters.
In this paper, we use GTX1050ti single GPU for
training. The experiments are based on MobileNet as
feature extract network, which is pre-trained. We
fine-tune the resulting model using SGD with initial
learning rate 0.004, 0.9 momentum, 0.0005 weight
decay. Because the memory of the GPU is only 4G,
the batch size is set to 20. Because transfer learning
have better performance in deep learning, we use
SSD_mobilenet_v1_coco, SSD_mobilenet_v2_coco
as initialize models to train our model.
4 EXPERIMENTAL RESULTS
AND ANALYSIS
In this paper, we first compare the downtrend curve
of lose function to evaluate the performance of
training. Then we evaluate the accuracy of our
method.
4.1 The Converge of Loss Function
Figure 6: The downtrend of loss function.
During training, The Tensorflow is used to compute
the loss for every iteration. Figure 6 shows that the R-
SSD method can converge at 0.4 with 200000 iteration
which is a good result. The final loss value (0.4)
means that our SSD method is useful for vessel
detection in IVUS. Matlab is used to combine the
loss function variation trend of each method to
measure their convergence speeds. Figure 7 shows
that the converge speed of R-SSD method is more
faster than that for original SSD and the best range
between 0.4 to 0.95 is achieved. As shown in Figure
8, using MobileNetV2 as the initialize model, can
achieve faster converge speed for loss function than
that using MobileNetV1. Figure 9 shows the
performance comparison between the proposed R-
Vessel Detecting using Restrict Single Shot Multibox Detector for Intravascular Ultrasounds
21
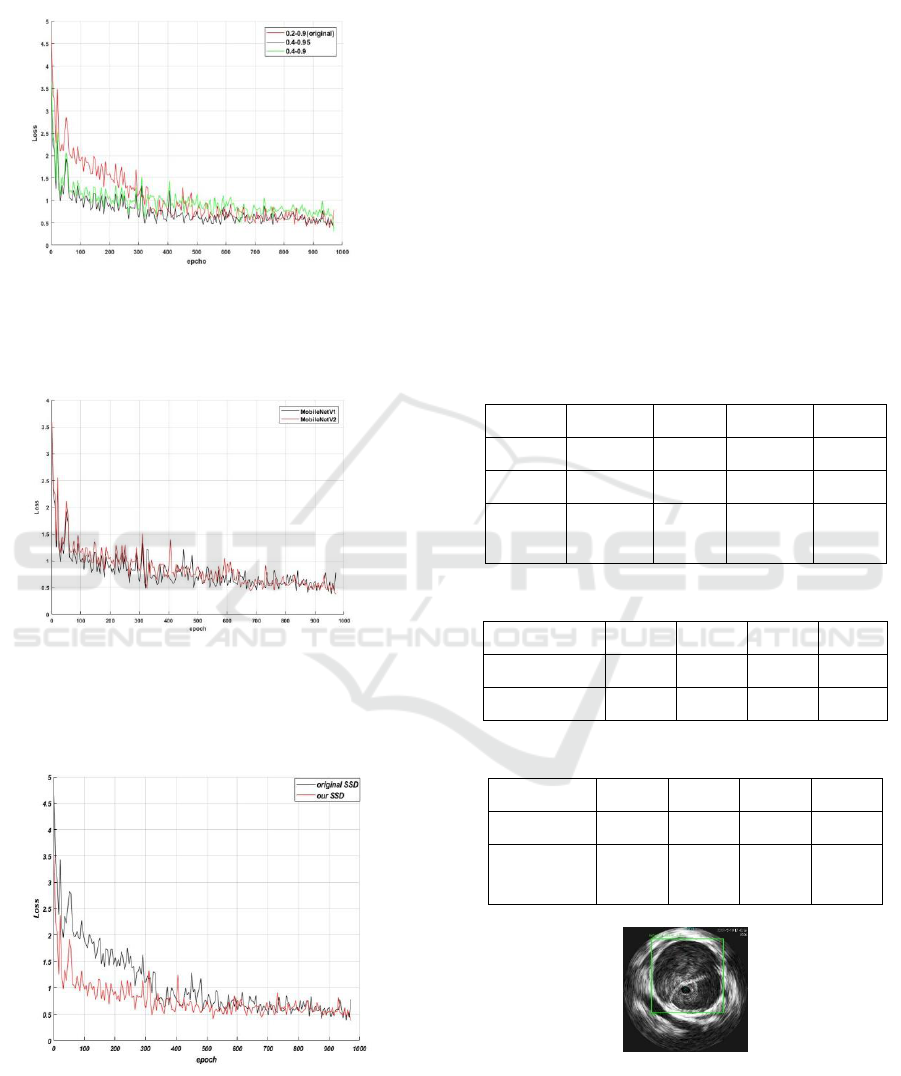
SSD and the original SSD, which shows that our R-
SSD is better than the original SSD in training speed.
Figure 7: The loss function converge of different prior box
shows that restrict range is fast than original range and the
range between 0.4 to 0.95 is the best range.
Figure 8: The loss function shows that MobileNetV2 have
better converge with likely invert resisdent structure and
training speed.
Figure 9: The loss function of our SSD and original SSD
(our restict SSD is better in converge speed during training
because its default box is more centralized)
4.2 Detection Accuracy
Four metrics including precision, recall, accuracy
and F1-score are used to quantify the performance of
object detection models. We first analysis the
performance with different range of default box. As
shown in Table 2, the range between 0.2 to 0.9 is the
best while the range between 0.4 to 0.95 is about
0.5%lower and 0.4 to 0.9 is the worst. Although the
range between 0.2 to 0.9 has the best performance in
accuracy, the range between 0.4 to 0.95 is much
better in loss function converge. So we considered
the range of default box between 0.4-0.95 has better
performance. On the other hand, Table 3 shows that
MobileNetV2, even it spend more time in a single
training, has 0.9% higher in detecting accuracy than
that for MobileNetV1. Considering the advantage of
loss function converge performance in MobileNetV2.
Table 2: The performance for different range.
range
P
R
A
F
0.2-0.9
96.3%
96.7%
96.5%
96.5%
0.4-0.9
93.4%
94.4%
93.9%
93.9%
0.4-
0.95
95.6%
96.7%
96.1%
96.1%
Table 3: The performance for different initialize model.
initialize
P
R
A
T
MobileNetV1
94.8%
95.6%
95.2%
0.893s
MobileNetV2
95.6%
96.7%
96.1%
0.935s
Table 4: The performance of R-SSD and original SSD.
method
P
R
A
F
R-SSD
94.6%
95.7%
95.1 %
95.1%
Original
SSD
95.6%
96.7%
96.1%
96.1%
Figure 10: The green rectangle shows the position of the
vessel that our object detection model detect.
We can affirm that MobileNetV2 is better than
MobileNetV1. We also compare the detecting
CTISC 2019 - International Conference on Advances in Computer Technology, Information Science and Communications
22

accuracy of our R-SSD with that of original SSD,
shown in Table 4 where our model has 1% higher
than original SSD in terms of accuracy. In Figure 10,
the vessel detected with our method is labelled in
green rectangle.
5 CONCLISIONS
We introduced a restrict-SSD as an object detector
for vessel in IVUS, which can restrict the range for
default box and change the initialize feature
extraction network to MobileNet, then to improve
training efficiency for models. We compared the
training speed and accuracy between the original-
SSD and our restrict-SSD, and the result shows that
our restrict-SSD outperforms the original-SSD.
The vessel detection will be a good start for the
future IVUS image classification. The reliable
classification results can do a great help to render
IVUS images automatically read by computers.
ACKNOWLEDGEMENTS
This work was supported by the foundation of
Guizhou Key Laboratory of Electric Power Big Data
,Guizhou Institute of Technology (2003008002).
We also thank Nanfang Hospital providing the IVUS
images and helpful comments.
REFERENCES
Tadashi A.,Nobutaka I., Devarshi S., and et al.(2016).A
new method for IVUS-based coronary artery disease
risk stratification: A link between coronary & carotid
ultrasound plaque burdens. Computer Methods &
Programs in Biomedicine. Volume 124,pages 161-179.
Sheet D., Karamalis A., Eslami A., et al. (2014). Hunting
for necrosis in the shadows of intravascular ultrasound.
Computerized Medical Imaging & Graphics.
38(2):104-112.
Krizhevsky A., Sutskever I., Hinton G E.(2012).ImageNet
Classification with Deep Convolutional Neural
Networks. In 2012 International Conference on Neural
Information Processing Systems(NIPS).ACM.
Girshick R.(2015). Fast R-CNN. In 2015 IEEE
International Conference on Computer Vision (ICCV).
IEEE.
Uijlings J.R.R., Sande K.E.A., Gevers T., Smeulders
A.W.M.(2013).Selective Search for Object
Recognition. International Journal of Computer
Vision.104(2):154-171.
Ren S., He K., Girshick R., Sun J.(2017). Faster R-CNN:
Towards Real-Time Object Detection with Region
Proposal Networks.IEEE Transactions on Pattern
Analysis & Machine Intelligence.39(6):1137-1149.
Liu W., Anguelov D., Erhan D., et al. (2016).SSD: Single
Shot MultiBox Detector. In European Conference on
Computer Vision. Springer.
Howard A G, Zhu M., Chen B., et al.(2017). MobileNets:
Efficient Convolutional Neural Networks for Mobile
Vision Applications, https://arxiv.org/abs/1704.04861
[Link].
Erhan D., Szegedy C., Toshev A., Anguelov D.
(2014).Scalable Object Detection Using Deep Neural
Networks. In 2014 IEEE Conference on Computer
Vision and Pattern Recognition(CVPR). IEEE.
He K., Zhang X., Ren S., Sun J.(2015). Spatial Pyramid
Pooling in Deep Convolutional Networks for Visual
Recognition. IEEE Transactions on Pattern Analysis &
Machine Intelligence. 37(9):1904-1916.
Zhou.B.,Khosla A., Lapedriza A., Oliva A., Torrala
A.(2015). Object Detectors Emerge in Deep Scene
CNNs, In International Conference on Learning
Representations. https://arxiv.org/pdf/1412.6856.pdf.
[Link]
Vessel Detecting using Restrict Single Shot Multibox Detector for Intravascular Ultrasounds
23
