
Towards Lakosian Multilingual Software Design Principles
Damian M. Lyons
1
, Saba B. Zahra
1
and Thomas M. Marshall
2
1
Department of Computer and Information Science, Fordham University, New York, NY, U.S.A.
2
Bloomberg LP, New York, NY, U.S.A.
Keywords: Software Engineering, Programming Languages, Multilingual Software, Software Metrics, Lakosian Metrics,
Software and Systems Quality.
Abstract: Large software systems often comprise programs written in different programming languages. In the case
when cross-language interoperability is accomplished with a Foreign Function Interface (FFI), for example
pybind11, Boost.Python, Emscripten, PyV8, or JNI, among many others, common software engineering tools,
such as call-graph analysis, are obstructed by the opacity of the FFI. This complicates debugging and fosters
potential inefficiency and security problems. One contributing issue is that there is little rigorous software
design advice for multilingual software.
In this paper, we present our progress towards a more rigorous design approach to multilingual software. The
approach is based on the existing approach to the design of large-scale C++ systems developed by Lakos. The
FFI is an aspect of physical rather than logical architecture. The Lakosian approach is one of the few design
methodologies to address physical design rather than just logical design. Using the MLSA toolkit developed
in prior work for analysis of multilingual software, we focus in on one FFI – the pybind11 FFI.
An extension to the Lakosian C++ design rules is proposed to address multilingual software that uses
pybind11. Using a sample of 50 public GitHub repositories that use pybind11, we measure how many
repositories would currently satisfy these rules. We conclude with a proposed generalization of the pybind11-
based rules for any multilingual software using an FFI interface.
1 INTRODUCTION
Software systems, especially large ones, are often
developed using more than one programming
languages (Mushtak and Rasool 2015) (Mayer,
Kirsch and Le 2017). These are often referred to as
multilingual or polylingual (Barrett, Kaplan and
Wileden 1996) software systems. Occasionally,
multilingual software refers to software localization –
customizing software to operate with a specific
human language/culture; this is not its usage in this
paper. In prior work (Lyons, Bogar and Baird 2018)
we have discussed the historical and engineering
trends that promote the development of multilingual
software. We high-lighted a key challenge faced by
developers and maintainers of multilingual software:
“While it may be possible to automatically inspect
individual language components of the codebase for
software engineering metrics, it may be difficult or
impossible to do this on a single accurate description
of the complete multilingual codebase.”
In a survey of software developers, Mayer et al.
(Mayer, Kirsch and Le 2017) find that 90% request
help in developing multilingual code bases. The
issues they raise include redundancy between
language functionalities, necessitating refactoring
(Strien, Kratz and Lowe 2006); unexpected
interactions between languages (Hong and al 2015),
and security breaches in cross-language calls
(Bravenboer, Dolstra and Visser 2010) (Lee, Doby
and Ryu 2016). Moreover, it appears this issue will
continue to grow in significance. In an analysis of
over 3800 papers over a 15-year time period,
Zaigham et al. (Zaigham, Rasool and Shehzad 2017)
report that 23% of these papers were written in the
two years prior to publication alone.
In our work, we have focused on the common
Foreign Function Interface (FFI) style of cross-
language interoperability. Examples include JNI,
PyV8, pybind11, and many, many others. The
advantages of examining this form of cross-language
interoperability, apart from its popularity, include that
it is amenable to static analysis of the source code by
looking at a call-graph (since the cross-language
transition is effected with a function call). However,
the FFI is opaque: we cannot see what other-language
functions are called within the FFI call. Thus, it
306
Lyons, D., Zahra, S. and Marshall, T.
Towards Lakosian Multilingual Software Design Principles.
DOI: 10.5220/0007958303060314
In Proceedings of the 14th International Conference on Software Technologies (ICSOFT 2019), pages 306-314
ISBN: 978-989-758-379-7
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

becomes more difficult to verify software correctness,
efficiency, and security. On top of this challenge,
while an FFI package developer might (sometimes)
make some recommendations as to how to safely use
the interface, an application programmer is typically
left to his or her own devices as to how to embed the
FFI into the host language software. This can lead to
a bewildering variety of designs for any one interface,
and of course, a programmer might choose to use
different interfaces for the same two languages at
different places in the software to leverage ease of use
or just plain familiarity. This lack of design guidance
greatly complicates multilingual software
engineering.
Grechanik et al. (Grechanik, Batory and Perry
2004) present a design approach for polylingual
software. The problem they address is the O(n
2
)
potential cross-language communications in n
programs. They propose a framework, called ROOF,
that presents a single API for all cross-language
communications. While this standardization clearly
has benefits, we take a different approach: we believe
software developers will use whatever FFI packages
become available, so rather than try to change this
behaviour, we limit ourselves to finding an approach
that addresses the analysis of the ‘messy’ multilingual
software thus created.
Lakos (Lakos 1996) addresses the problem of the
physical design of large-scale C++ software. He
proposes a set of guidelines for the physical
architecture of large C++ codebases that has certainly
stood the test of time (an extensively expanded
version is scheduled by Addison-Wesley for 2021). It
addresses issues such as how to structure source code
files into components, packages, and package groups
in a modular way, avoiding potentially troublesome,
hidden linkages between the source code units that
hinder efficiency, scalability and understandability.
These troublesome linkage issues are similar to those
caused by multilingual interoperability APIs and it is
the thesis of this paper that some of the principles
introduced for large-scale C++ physical design in
(Lakos 1996), Lakosian principles, are relevant for
multilingual design.
To illustrate this, we focus here on a common
interoperability API, pybind11 (Smirnoff 2017),
which allows mutual calling between C++ and
Python. While Python is often convenient for high
level programming, C++ can offer a more efficient
platform to implement numerical algorithms.
Pybind11 was released in 2015 and has become a very
popular alternative to the Boost.Python library
(Abrahams and Grosse-Kunstleve 2003). To measure
the popularity, we searched for public GitHub
repositories using pybind11 and using Boost.Python.
It has been 17 years since Boost.Python was released,
and we found 478 repositories that referenced it. It
has been only 4 years since pybind11 has been
released and we found 233 repositories that reference
it. The ratio of these time in existence to amount of
repositories numbers would suggest that pybind11, at
58.2, is experiencing higher growth than the more
mature Boost.Python, at 28.1. Public comments on
programming forums typically cite pybind11’s
header-only nature, STL/Eigen support and full
coverage of Boost.Python functionality as reasons for
adoption. We take this step of picking one FFI to
make our conclusions more concrete, and while we
justify this choice for this paper, we could have
selected a different one. We also specifically pick an
FFI rather than a language such as Cython
(http://cython.org) which aims to minimize the FFI
aspect of calling C from Python; though given the
popularity of Cython, we will come back to this later
in the paper.
We begin in Section 2 by briefly reviewing those
aspects of Lakosian design principles for large-scale
C++ development that will prove useful. Multilingual
software with the Foreign Function Interface (FFI) is
introduced in Section 3 with pybind11 as a specific
example. The MLSA (Multilingual Software
Analysis) toolkit (Lyons, Bogar and Baird 2017)
(Bogar, Lyons and Baird 2018), which will be used to
investigate FFI usage in a collection of pybind11
repositories, is introduced in Section 4. Some
common FFI practices will be identified that show
analogous troublesome linkages to those first
identified by Lakos in C++ physical design. As a
solution, we will propose an extension of some
Lakosian principles to address, first, pybind11/C++
repositories, and later (Section 6) FFI software in
general. The pybind11 repository experimentation
and results are reported in Section 5 and our
conclusions presented in the final section.
2 LAKOSIAN DESIGN
PRINCIPLES
Physical design is defined by Lakos as being
concerned with the physical aspects of a software
code repository: the directories, header files, source
files, libraries and issues related to these. Contrast this
with logical design, which relates to classes,
functions and so forth. His motivation in considering
physical design is the issue of scaling to very large
software systems written in C++. Our motivation is
Towards Lakosian Multilingual Software Design Principles
307

different, relating as it does to the inter-language
interface in multilingual software and issues relating
to scaling, but we find that there are common
concerns and solutions which can usefully be
transferred from this prior work to our problem.
Lakos introduces some useful terminology and it
is helpful to recapitulate it here:
• A component is a unit of physical design
consisting of a source file (an implementation, a
.cpp file for Lakos) and associated header file (an
interface, a .h file for Lakos). All our work here
will be component-based and we leave
consideration of C++ modules for future work.
• A name is introduced into a name scope
(namespace) via a declaration and is uniquely
defined with a definition.
• Components are grouped into packages which
are grouped into package groups.
• A translation unit is the union of all components
being processed by a compiler at one time.
• A name has external linkage if it refers to the
same object across multiple translation units.
• A name has internal linkage if it is only visible
in its translation unit.
Among the many rules defined by Lakos to address
issues in physical design, we identify a small subset
that when interpreted in a multilingual context, as we
will in a later section, are also important design rules.
They are presented with their original intent here:
R1. The source file includes the header file as its
first substantive line of code
R2. All logical constructs having external
linkage defined in a source file are declared
in the corresponding header file
R3. All constructs having external linkage
declared in a header file are defined within
the component.
While there are arguably additional Lakosian design
rules that can address multilingual software, we select
these rules because they are designed to address the
problem of potential inconsistencies in name bindings
in external linkages. They ensure that externally
linked functions and objects are defined in a
predictable, easy to find, and easily understood
manner.
3 MULTILINGUAL SOFTWARE
Modern software development is increasingly
multilingual: Developers might build a software
project from different language components for
functionality or style reasons. In prior work (Lyons,
Bogar and Baird 2017) (Bogar, Lyons and Baird
2018) (Lyons, Bogar and Baird 2018), we have
looked at the problem of providing tools for analyzing
multilingual code bases to address software
engineering and security concerns. We proposed a
software architecture for lightweight multilingual
software analysis tools – the MLSA architecture and
introduced some tools for generating multilingual
call-graphs, which we argued can be the basis for the
addressing many useful software engineering and
security concerns.
3.1 Foreign Function Interface
Programs in one language can communicate with
software written in a second language through several
means (Grimmer, et al. 2018): message passing,
foreign-function interface, and multi-language run-
time. Rather than proposing any new scheme for
writing, including or executing multilingual software
in this paper, we have instead focused on processing
existing and widely used FFI packages, e.g., JNI (C
with Java), Python.h (C/C++ with Python), PyV8
(JavaScript with Python), Emscripten (JavaScript
from C++), JQuery (Python from JavaScript), and so
forth. As we initially stated, advantages of focusing
on this form of cross-language are that it is quite
common and it is amenable to static analysis of the
source code by looking at a call-graph. Message
passing is more difficult to analyze statically
(Bronevetsky 2009), and a common language run-
time analysis must be done on the common language
bytecode.
All of these FFI packages differ in their syntax
and use and there are no standards or guidelines that
specifically address their use. In fact new cross-
language interfaces are defined all the time:
Boost.Python (Abrahams and Grosse-Kunstleve
2003) introduced a powerful library for binding C++
classes and functions to Python, a great improvement
over the interoperability provided by Python’s C/C++
interface (Python 2.7 documentation 2010).
Subsequently, pybind11 was developed as a light-
weight, header-only interface (Smirnoff 2017) with
similar functionality. For historical reasons, all three
are still used, and it is not unlikely that new ones will
be developed!
All these interoperability interfaces provide the
common function of mapping from the namespace of
one programming language to that of another. But in
the Lakosian vocabulary, they map from the
namespace of one translation unit to that of another.
In that framework, every translation unit is C++ code,
Fig. 1(a) whereas we propose to relax that constraint.
ICSOFT 2019 - 14th International Conference on Software Technologies
308
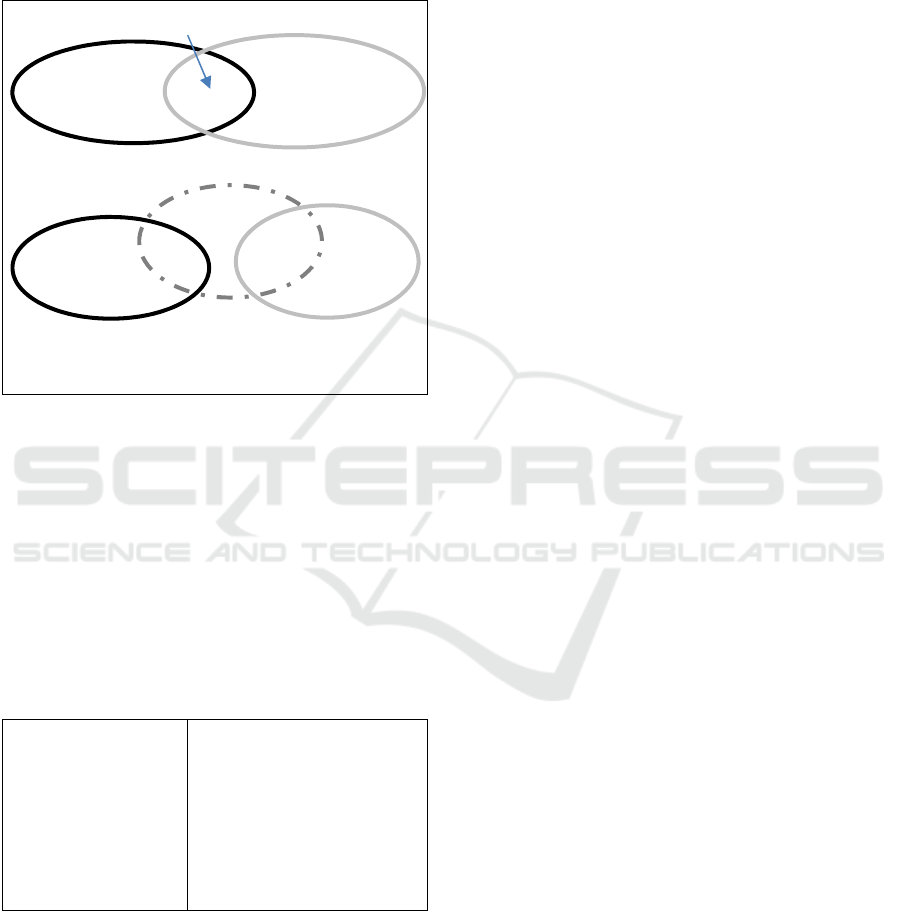
Hence, FFIs define an external linkage between the
two language translation units, Fig.1(b) – a topic
about which Lakos has design advice that we can
leverage. Our approach to addressing this issue with
Lakosian design principles will be to work from the
specific to general, starting with a pybind11 example.
(a)
(b)
Figure 1: (a) External linkage between C++ translation
units; (b) Foreign-function interface between multilingual
translation units.
3.2 Standard Pybind11 Case
A straightforward example of the use of pybind11 to
call a C++ function from a Python script
A.py is
shown in Fig. 2(a). A C++ file
B.cpp, shown in Fig.
2(b), defines a function
f, and establishes that it can
be called in Python (with the same name
f in this
example). After compilation, a binary file is
generated that can be imported as a Python module.
#Python file A
# C++ functions
import B
.
# call C++ function
x = B.f(34)
.
.
(a)
//C++ file B
#include <pybind11>
// declaration
int f(int a);
// bind python “f” to f
PYBIND11_MODULE(B,m){
m.def(“f”,&f)
}
(b)
Figure 2: Pybind11 example.
Let us begin by considering the software in Fig. 2 as
two components. Each component has an interface
(header file) and implementation (source file). This
separation is important in physical design. The lines
shown in bold font in Figs. 2(a) and (b) is the header
file information and those below it, the source file
information.
To respect R1-3 of Section 2, it necessary that the
header file
B.h contains (at least) the material in bold
in Figure 2(b) and the source file
B.cpp contains (at
least) the remainder. The rationale is a little different
from the regular C++ case but reflects the same
concerns with external linkage, or name binding. The
Python file
A.py needs to import declaration
information for the external linkages (C++ names) it
uses (R2). For this example, that information is in the
m.def commands in B.cpp and not in B.h, which
has the declarations of the C++ functions referenced
by these bindings. Thus, the implementation
declarations should be separate from the bindings,
which should be in a source file named for the
module. (An informal rule advocated by the pybind11
developers). The implementation declarations should
be included in the header file for the component, and
definitions in a separate source file, providing
insulation for the module implementation.
Summarizing, and based on R1-R3 in Section 2:
M1. The python component imports the
pybind11 generated module by name, in
standard python syntax.
M2. The source file of the binding component
must be named after the module, so that
there is a transparent connection to the
interface with the important statement (R2).
M3. The header file of the binding component
should declare the implementation of the
bound functions (R3).
In addition to following Lakosian design principles
for physical architecture, or perhaps because of it,
these rules also simplify the static analysis of
multilingual code bases by making it readily clear in
what files functions are located. The multilingual
software analysis toolkit MLSA is described in the
next section as prelude to using the toolkit. Public
GitHub repositories using pybind11 will be analysed
with MLSA to determine how many abide by the
proposed principles and in what ways they differ.
4 THE MLSA TOOLKIT
Developers may build a software project (here, the
input data for our MLSA analysis tools) from
different language components for functionality or
style reasons, while at the same time companies
maintain a commitment to language already used in
company software, leading to an increasingly
crowded and complex landscape of multilingual
Translation unit namespace A Translation unit namespace B
External Linkage between A and B
A B
Language A
Translation unit names
p
ace
Language B
Translation unit names
p
ace
External Linkage between A and B via FFI
FFI
A B
Towards Lakosian Multilingual Software Design Principles
309
software development. Any solution that is narrowly
focused on the existing state-of-the-art will find itself
quickly outdated as new languages or interoperability
APIs or language embeddings appear. For this reason,
we proposed the following design principles for a
software architecture for MLSA (Lyons, Bogar and
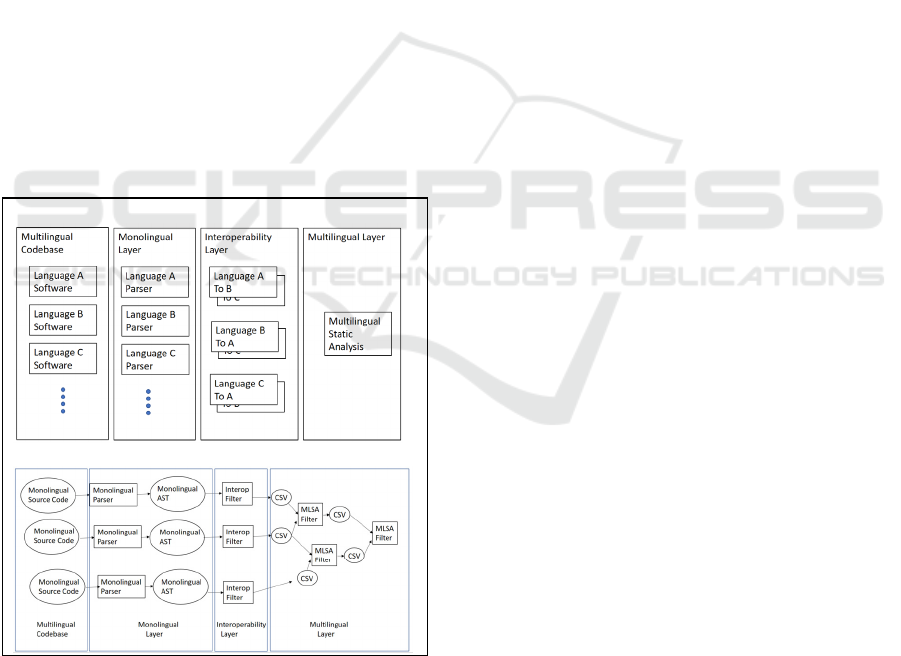
Baird 2017) (Fig. 3).
1. Lightweight: Computation is carried out by
small programs, which we call filters, that
communicate results with each other. A
specific software analysis is built as a
pipeline of these programs.
2. Modular: Filter programs accept input and
produce output in a standard form, to allow
modules to be substituted or added with
minimum collateral damage.
3. Open: MLSA uses open-source software for
monolingual processing and for display.
4. Static Analysis: MLSA uses static source
code analysis as its principle approach
Illustrating the lightweight design principle, each
filter is a small standalone program, implementing a
single analysis. The only constraint on the filter is on
the format of its input and output. Filter programs can
be written in different languages as shell scripts.
(a)
(b)
Figure 3: MLSA Software Architecture (a); example filter
pipeline, from (Lyons, Bogar and Baird 2017) (b).
The modularity design principle means that extending
MLSA to handle a new cross-language interface is as
simple as extending the parts of the processing
pipeline with scripts designed for the new interface.
4.1 Multilingual Call-graph Analysis
We have argued in prior work (Lyons, Bogar and
Baird 2017) (Lyons, Bogar and Baird 2018) (Bogar,
Lyons and Baird 2018) that call-graph analysis is one
productive tool for investigating software
engineering properties of multilingual code, and we
have focused our research on what is required to
construct a multilingual call-graph. In addition to the
challenges of monolingual call-graph construction,
e.g., (Ali and Lhotak 2012) (Bacon and Sweeney
1996) (Bogar, Lyons and Baird 2018), multilingual
call graphs have to include edges that span one
language to a second. Since it is very typical in an FFI
for the name of the function in the second language to
be specified by the value of an argument to a function,
and not as a name or label in the host name space,
static analysis of the code becomes challenging. In
(Lyons, Bogar and Baird 2018), we propose a
solution to this problem based on a Reaching
Definitions Algorithm (RDA) (Nielson, Nielson and
Hankin 2005) to statically resolve argument values.
Using this, we demonstrated multilingual call graphs
for software code bases using C/C++, Python and
JavaScript languages. We showed how the call graph
could be used to identify potential software security
hazards and other software engineering concerns that
would normally be hidden by the opacity of the cross-
language interface.
4.2 MLSA Pybind11 Filter
To include the pybind11 cross-language
interoperability interface to the repertoire of FFI that
MLSA handles, it was only necessary to build an
additional MLSA filter and add it to the multilingual
call-graph pipeline in Fig. 2 of (Lyons, Bogar and
Baird 2018). That pipeline is summarized below, for
convenience. For simplicity, and since it suited the
goals of this paper, only the Python calling C++
direction was implemented (our review of GitHub
repositories shows this was by far more common),
and only the function call interface (
.def) was
implemented and not the variable (
.attr) interface.
The MLSA multilingual call-graph pipeline
(Lyons, Bogar and Baird 2018) proceeds as follows:
1. MLSA begins by generating Abstract Syntax
Trees (ASTs) for each monolingual program.
2. From these, it extracts all the function definitions
and calls, and writes them to csv-formatted data
files. (Bogar, Lyons and Baird 2018)
3. Filter programs for various cross-language
interoperability FFIs post-process these files,
ICSOFT 2019 - 14th International Conference on Software Technologies
310
replacing the cross-language FFI call with the
cross-language function being called (in so much
as that can be statically determined by RDA).
4. The resultant data files are then merged to
produce a single multilingual call graph.
The MLSA pybind11 filter is just another filter added
to stage 3 of this processing pipeline. The filter
searches the datafiles generated from the Python AST
looking for a function call in a module that has been
defined in C++ rather than Python. (It knows this
from inspecting the data files generated in stage 2.)
The datafile for the C++ module is then scanned for
references to the
.def function. The arguments to
.def are processed to determine the name of the
target function. Only literal values, or variables
previously assigned literal values (found by RDA
analysis) are currently allowed. The python function
call is replaced in the datafile by the C++ function.
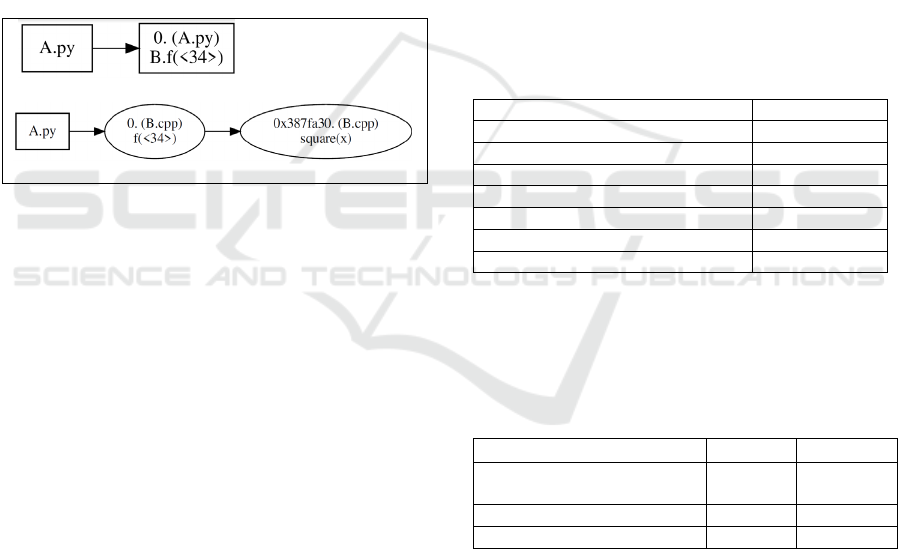
(a)
(b)
Figure 4: Multilingual call-graph extracted by MLSA from
the example in Fig. 2: (a) just A.py and (b) for A.py and
B.cpp/.h Node shape: Rect: Python; Ell: C/C++.
Fig. 4 shows the multilingual call graph generated in
this way from the example in Fig. 2. Fig. 4(a) shows
the call graph for just the Python component
A.py.
Fig. 4(b) shows the call graph after the pybind11 filter
has acted. The python function call
B.f() has been
correctly bound to the C++ function
f() and its
implementation subgraph included. Different
languages are indicated in MLSA call graphs with
different node shapes: here, rectangular indicates
Python and ellipse indicates C++. Note that the
implementation of
f() is not shown in Fig.2 but is
shown here: A call from the C++
f() function to the
C++
square() function.
The MLSA pybind11 filter provides a convenient
lens to study how pybind11 is used in practice, and to
evaluate to what extent the proposed Lakosian
inspired design rules are followed. In the next section
we present the results of our experimental analysis of
public GitHub repositories.
5 EXPERIMENTAL RESULTS
GitHub has become a popular platform for
collaborative software development, with over 30M
users and 100M repositories (github.com/about). To
measure how pybind11 is used by software
developers, and how often our proposed design rules
reflect common practice, we collected public GitHub
repositories that use pybind11. A simple keyword
search showed over 900K repositories using Python
and almost 500K repositories using C++. Of these
almost 12K used both C++ and Python. However,
only 233 specifically mentioned pybind11, and we
restricted our attention to these.
Many of the repositories just contained examples
or tutorials for pybind11 and in general we rejected
all but one copy of these small repositories until we
had reached 50 samples – an arbitrary limit selected
to yield generalizable results. Table 1 describes the
sizes of the repositories.
Table 1: Details of Sample Repositories.
Num. repositories 50
Num. pybind11 modules 449
Total num. files 3712
Num. PY files 540
Num. CPP files 748
Total lines of code 4.2M
Max, min, avg. num. files 1131, 3, 75
Max, min, avg. lines of code 2.3M, 312, 83K
The MLSA pybind11 filter was augmented to count
how often the repositories complied with our
extended Lakosian design rules. The results are in
Table 2.
Table 2: Summary Results of Study.
Rep. Mod.
Num. rep./mod. meeting
M1-M3
8 (16%) 360 (80%)
Binding misname (fails M2) 27 (54%) 40 (9%)
Impl. in binding (fails M3) 24 (48%) 53 (12%)
Table 2 reports that 16% of the repositories strictly
followed the guidelines proposed. That means all 360
modules in those repositories followed the rules. The
small repository number and large module number
indicate that the repositories following the rules were
in fact all the largest repositories in the collection. We
contend that this large minority figure could be
considered a vote in favour of our proposed
guidelines. Given the variety of usage observed, we
summarized failure to follow the guidelines into two
categories: Where the binding component was not
Towards Lakosian Multilingual Software Design Principles
311
named after the module (fails M2; 54%) and where
the implementation was included alongside the
binding (fails M3; 48%). A repository was counted as
failing M2 or M3 if any module in the repository
failed. As can be seen from the smaller module
percentages for this, many repositories contained a
mix of modules meeting and not meeting each of the
two criteria. Based on this study, 84% of the
repositories have potential software engineering
challenges related to ambiguity in how they defined
external linkages. Several recurring themes were
identified in non-compliant repositories; we discuss
these in more depth below.
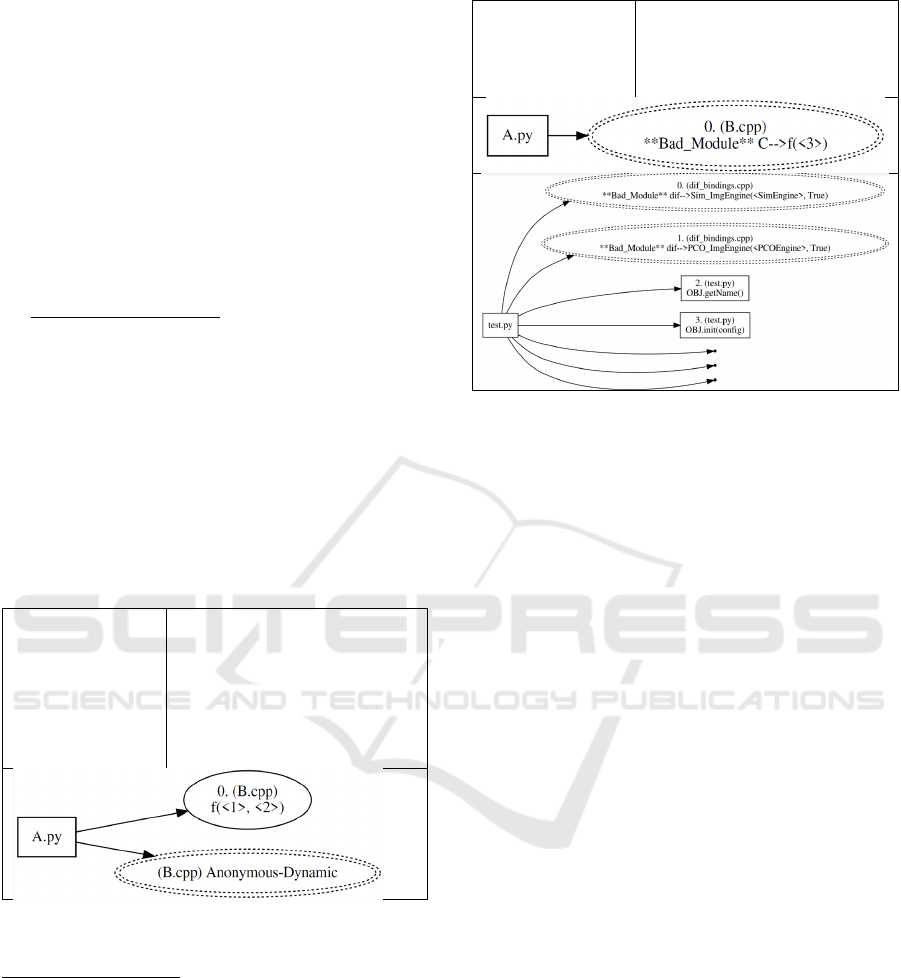
Anonymous Functions. We consider any function,
such as a lambda function, which is defined directly
in the binding as an anonymous function. This
approach fails to meet design rule M3. An example is
shown in Fig. 5. While lambda functions are elegant
solutions to certain problems, anonymous functions
of any kind are more difficult to track. Our approach
in MLSA is to flag these for closer (manual)
inspection when detected. We observed that 20% of
the repositories used lambda functions in any module.
Only 4% of modules used lambda functions,
however, approximately half of which were used for
member variable get/set functionality.
# A.py
import B
x=B.f(1,2)
y=B.g(3,4)
//B.cpp
#include “impl.h” // def f
PYBIND11_MODULE(B, m) {
m.def("f",&f);
m.def("g",
[](int i, int j)
{ return i - j; });
}
Figure 5: Anonymous function example.
Misnamed Module. Included in this category is
anything that puts the binding information in a place
that is not clearly visible by inspection of the software
or static analysis. The obvious example (shown in
Fig. 6) is where the binding component is not named
with the module name. MLSA can still find the
binding but it flags the situation for correction, since
the software becomes more difficult to maintain when
the external linkages are not readily visible in a single
location. Other cases of this include multiple modules
in one binding (makes clear naming difficult), or
binding information in a different location from the
# A.py
import C
x=B.f(3)
//B.cpp
#include “impl.h” # def f
PYBIND11_MODULE(C, m) {
m.def("f",&f);
}
Figure 6: Misnamed module example (top two rows,
explanatory example; bottom row, summarized example
call-graph from repository collection).
location the module will be imported from (a
directory named for the module, for example). We
found no example where there were multiple
modules defined in a single binding.
6 PROPOSED LAKOSIAN ML
DESIGN RULES
This paper has focused on pybind11 as a specific
example for developing multilingual software design
guidelines. We generalize our Lakosian inspired
physical design rules M1-M3 for any FFI from a host
language to a target language.
ML1. The host component imports/includes a single
uniquely named FFI interface file.
ML2. The source file of the FFI binding component
in the target language must be named after the
FFI interface file, so that there is a transparent
connection to the interface (R2).
ML3. The source file of the binding component
should import, or include declarations of, the
implementation of the bound functions (R3) in
the target language.
While we argue that this extension can be justified
based on our pybind11 examples and the original
Lakosian rules, a realistic validation requires it should
be evaluated against a range of FFI. That work is
beyond the scope of this paper in general, but we will
look at just one important case: How would this
specialize to Cython?
ICSOFT 2019 - 14th International Conference on Software Technologies
312

Cython is a static compiler that accepts a superset
of Python allowing a programmer to mix C/C++
declarations and definitions in Python-like code
which is then translated to C for efficient
implementation. In particular, programmers can write
modules that can be imported and called from Python,
in a manner analogous to pybind11. Our general ML
design rules can be applied to this usage of Cython as
follows:
C1. The python component imports the Cython
generated module (created by the build file) by
name, in standard python syntax.
C2. The binding file (~.pyx) should be named the
same as the binding module name in the build
file (~setup.py).
C3. The binding file should include a header file
containing declarations of the C functions used
in the binding functions in (~.pyx).
7 CONCLUSIONS
Large software systems often have components
written in different languages. The FFI approach to
cross-language interoperability is popular and
relatively easy to use, mimicking as it does a host
language function call. Our approach is to accept that
programmers will continue to use existing and new
FFI interfaces, and we do not try to present a new
multilingual interface concept or formalism. Instead,
we have developed a lightweight toolkit, MLSA
(Lyons, Bogar and Baird 2018) for analysing such
multilingual systems and identifying software
engineering and security issues. In particular, given
the nature of the FFI, we have focused on call-graph
analysis (Bogar, Lyons and Baird 2018). In this paper,
we have addressed the problem that there is little in
the way of design assistance for FFI based
multilingual software, comparable to the Lakosian
design method of (Lakos 1996) for C++.
We have proposed an extended application of
the Lakosian design method to multilingual software.
In particular, we applied this to software written using
the popular pybind11 FFI to call C++ from Python.
We reported on our study of 50 public GitHub
pybind11 repositories: While 16% already adhered to
our guidelines, 84% did not. Of the non-compliant
cases, binding file naming and use of lambda
functions are the most often issues. Based on our
experience with pybind11, we proposed a more
general set of multilingual design rules. In future
work, we plan to evaluate these rules against other
FFI. Finally, we believe we have just begun the task
of understanding how Lakosian physical design rules
hold value for the design of multilingual software.
ACKNOWLEDGEMENTS
Lyons and Zahra are partially supported by grant DL-
47359-15016 from Bloomberg L.P.
REFERENCES
Abrahams, D., and R.W. Grosse-Kunstleve. 2003. Building
Hybrid Systems with Boost.Python. 14 5.
https://www.boost.org/doc/libs/1_69_0/libs/python/do
c/html/article.html.
Ali, K., and Ondrej Lhotak. 2012. “Application-only Call
Graph Construction.” ECOOP'12 Proceedings of the
26th European Conf. on Object-Oriented Prog..
Beijing.
Bacon, D., and P. Sweeney. 1996. “Fast static analysis of
C++ virtual function calls.” 11th ACM SIGPLAN Conf.
on OO Prog. Sys., Lang & App.
Barrett, D., A. Kaplan, and J. Wileden. 1996. “Automated
support for seamless interoperability in polylingual
software systems.” 4th ACM SIGSOFT symposium on
Foundations of software engineering. New York.
Bogar, A.M., D. Lyons, and D. Baird. 2018. “Lightweight
Call-Graph Construction for Multilingual Software
Analysis.” 13th Int. Conf. Soft. Tech.. Porto, Portugal.
Bravenboer, M., E. Dolstra, and E. Visser. 2010.
“Preventing injection attacks with syntax embeddings.”
Sci. Comput. Program. 75 (7): 473-495.
Bronevetsky, G. 2009. “Communication-Sensitive Static
Dataflow for Parallel Message Passing Applications.”
International Symposium on Code Generation and
Optimization. Seattle WA.
Grechanik, M., D. Batory, and D. Perry. 2004. “Design of
large-scale polylingual systems.” 26th Int. Conf. on
Software Systems. Edinburgh UK.
Grimmer, M., R. Schatz, C. Seaton, T. Wurthinger, and M.
Lujan. 2018. “Cross-Language Interoperability in a
Multi-Language Runtime.” ACM Trans. on Prog.
Languages and Systems (ACM) 40 (2): 8:1-8:43.
Hong, S., and et al. 2015. “Mutation-Based Fault
Localization for Real-World Multilingual Programs.”
30th IEEE/ACM Int. Conf. on Automated Software Eng.
Lakos, John. 1996. Large-Scale C++ Software Design.
Addison-Wesley..
Lee, S., J. Doby, and S. Ryu. 2016. “HybriDroid: static
analysis framework for Android hybrid applications.”
31st IEEE/ACM International Conference on
Automated Software Engineering. Singapore.
Lyons, D., A. Bogar, and D. Baird. 2017. “Lightweight
Multilingual Software Analysis.” 12th Int. Conf. on
Software Technologies (ICSoft). Madrid, Spain.
Lyons, D., A.M. Bogar, and D. Baird. 2018. “Lightweight
Multilingual Software Analysis.” In Chall. & Opp. in
ICT Research Projects, by J. Filipe. SCITEPRESS.
Mayer, P., M. Kirsch, and M-A. Le. 2017. “On multi-
language software development, cross-language links
and accompanying tools: a survey of professional
Towards Lakosian Multilingual Software Design Principles
313

software developers.” Journal of Software Engineering
Research and Development 5 (1).
Mushtak, Z., and G. Rasool. 2015. “Multilingual source
code analysis: State of the art and challenges.” Int.
Conf. Open Source Sys. & Tech.
Nielson, F., H.R. Nielson, and C. Hankin. 2005. Principles
of Program Analysis. Springer.
2010. Python 2.7 doc.. https://docs.python.org/2.7/.
Smirnoff, I. 2017. “Seamless operability between C++11
and Python.” EuroPython Conference. Rimini, Italy.
Strien, D., H. Kratz, and W. Lowe. 2006. “Cross-Language
Program Analysis and Refactoring.” 6th Int. Workshop
on Source Code Analysis and Manipulation .
Zaigham, M., G. Rasool, and B. Shehzad. 2017.
“Multilingual Source Code Analysis: A Systematic
Literature Review.” IEEE Access PP (99).
ICSOFT 2019 - 14th International Conference on Software Technologies
314
