
“ReLIC: Reduced Logic Inference for Composition” for Quantifier
Elimination based Compositional Reasoning
Hao Ren
1 a
, Ratnesh Kumar
2 b
and Matthew A. Clark
3 c
1
Honeywell Aerospace Advanced Technology, 12001 Hwy 55, Plymouth, MN, U.S.A.
2
Department of Electrical and Computer Engineering, Iowa State University, Ames, IA, U.S.A.
3
Galois Inc., 444 E 2nd St, Dayton, OH, U.S.A.
Keywords:
Quantifier Elimination, Compositional Verification, System Property Composition.
Abstract:
We present our work on the role and integration of quantifier elimination (QE) for compositional verification.
In our approach, we derive in a single step, the strongest system property from the given component properties.
This formalism is first developed for time-independent properties, and later extended to the case of time-
dependent property composition. The extension requires additional work of replicating the given properties
by shifting those along time so the entire time-horizon of interest is captured. We show that the time-horizon
of a system property is bounded by the sum of the time-horizons of the component properties. The system
initial condition can also be composed, which, alongside the strongest system property, are used to verify a
postulated system property through induction. The above approaches are implemented in our prototype tool
called ReLIC (Reduced Logic Inference for Composition) and demonstrated through several examples.
1 INTRODUCTION
Compositional reasoning is employed for scaling the
model-based verification approaches for distributed
systems. The component-based compositional design
paradigm emphasizes the separation of concerns with
respect to the system design through a modular and
reuse based paradigm for defining, implementing, and
composing components into systems.
For example, Unmanned Systems Autonomy Ser-
vices (UxAS) software system (Rasmussen et al.,
2016) consists of a collection of modular services that
interact via a common message passing architecture.
It provides a framework to construct and deploy soft-
ware services that are used to enable autonomous ca-
pabilities by flexibly implementing autonomy algo-
rithms on-board Unmanned Aerial Vehicles (UAV)s
(Kingston et al., 2016). Verification of such systems
seeks to utilize component properties to establish the
composed properties of a system.
Many properties in systems and controls can be
formulated as formulae in the first-order logic of real
closed field. Quantifier elimination (QE) (Tarski,
a
https://orcid.org/0000-0001-7101-6120
b
https://orcid.org/0000-0003-3974-5790
c
https://orcid.org/0000-0003-4396-9041
1998) is a powerful technique for gaining insight in
system properties, through simplification, by way of
projection where a formula with some quantified vari-
ables is projected to a lower dimension over only its
free variables.
In our previous work (Ren et al., 2016; Ren et al.,
2018), we established that QE provides a foundation
for compositional reasoning, and also can be used to
aid formal verification and model-checking. Initially,
during component development phase, each compo-
nent is annotated with an assume-guarantee style con-
tract (Emmi et al., 2008; Quinton and Graf, 2008).
Supposing a system is composed of N components,
the contract formula of the ith component can be ex-
pressed as A
i
⇒ G
i
where A
i
(the “assumption”), G
i
(it’s “guarantee”) are both expressed by formulae over
the set of component variables. Then the set of all
the system behaviors is constrained by the conjunc-
tion of all the components’ contracts
V
N
i=1
(A
i
⇒ G
i
).
Under these contracts, we show that “the strongest
system property”, that can be claimed that the sys-
tem satisfies, can be obtained by existentially quan-
tifying the system’s internal variables in the con-
junct of
V
N
i=1
(A
i
⇒ G
i
) and the constraints result-
ing from the connectivity relation among the com-
ponents. Thus we established that QE serves as a
foundation for property/contract composition. Now
534
Ren, H., Kumar, R. and Clark, M.
“ReLIC: Reduced Logic Inference for Composition” for Quantifier Elimination based Compositional Reasoning.
DOI: 10.5220/0007927805340540
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 534-540
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

to check whether a system satisfies a postulated prop-
erty, we only need to check if the postulated prop-
erty is implied by the aforementioned strongest sys-
tem property. This in itself can be cast as a QE prob-
lem. Our QE based framework can derive the above
strongest system property automatically as we show
it later in the next section as part of review of our pre-
vious work.
This paper further extends our QE-based property
composition to the case of time-dependent or tempo-
ral properties, which can depend on a (finite) history
of input/output variables of a system and its compo-
nents. We show that the composed property may in-
volve a longer history, but no more than the cumu-
lative histories of all its components. Accordingly,
we introduce the notion of property order, deriva-
tion of system order, and the composition of given
properties along with their time-shifted replicas to in-
fer the strongest system property. We have imple-
mented our QE-based compositional verification ap-
proach in a prototype tool, ReLIC (Reduced Logic
Inference for Composition), based on the integra-
tion of Redlog (red, 2015) with AGREE (AGR, 2012;
Gacek et al., 2015; Stewart et al., 2017)—the for-
mer supports QE, while the latter supports descrip-
tion of a system and its components, their connec-
tivity, and properties in the modeling framework of
AADL (Feiler et al., 2006). Our integration uses only
the front-end of AGREE for specifying system architec-
ture/connectivity, components, and their properties in
AADL and AGREE annex, and also for reporting the
result of property composition to the user.
2 QE-BASED COMPOSITIONAL
VERIFICATION
Our QE-based compositional reasoning approach is
based upon introducing the notion of the “strongest
system property”, derived from the given component-
level properties. Consider a system S composed of
N components. Let X := {x
1
, . . . , x
n
} be the set of
all variables in S, X
int
:= {x
1
, . . . , x
m
} ⊆ X(m ≤ n),
be the set of internal variables, X
sys
:= X \ X
int
=
{x
m+1
, . . . , x
n
} be the set of external variables (namely,
the inputs and outputs of S), and C := {(x
p
, x
q
) | x
p
and x
q
are variables of connected ports in S} be
the set of connectivity relation among component in-
put/output variables. Suppose the i
th
component’s
property is described by an assume-guarantee style
contract (A
i
, G
i
) in first-order logic, meaning A
i
⇒ G
i
holds. We define the strongest system property and
present a result that provides a method to derive it.
The proof can be found in (Ren et al., 2016).
Definition 2.1. The strongest system property is the
system property that implies any other system proper-
ties established upon the given component properties
and the connectivity relation.
Theorem 2.1. The strongest system property of a
system S established upon its component contracts
{(A
i
, G
i
)|1 ≤ i ≤ N}, component connectivity relation
C = {(x
p
, x
q
)|x
p
and x
q
are connected ports in S},
and internal variables {x
i
, . . . , x
m
}, is given by,
∃x
1
. . . ∃x
m
N
^
i=1
(A
i
⇒ G
i
) ∧
^
(x
p
,x
q
)∈C
(x
p
= x
q
)
. (1)
Remark. Through (1) in Theorem 2.1, we have shown
that property composition, in a component-based
compositional framework, is an instance of a QE
problem. Based on this insight, we put forth a two-
step QE-based compositional verification procedure.
The first step is to generate the strongest system
property, through a QE process of (1), applied to
component contracts and connectivity relation. The
strongest system property upon QE, denoted φ
sys
,
contains only the system-level input/output variables
(as the internal variables get existentially quantified
and eliminated upon QE). The second step is to check
if φ
sys
implies any postulated system property φ
postl
that also contains only system-level input/output vari-
ables. For this we can employ yet another instance
of QE, this time over the external variables of S:
∀x
m+1
. . . ∀x
n
(φ
sys
⇒ φ
postl
) to reduce through QE ei-
ther to true or f alse.
3 RELIC FOR TIME-DEPENDENT
PROPERTY COMPOSITION
Complex systems often exhibit time-dependent fea-
tures through components such as PID controller,
delay, counter, or state-machine. In such cases, a
component property can be a constraint over its in-
put/internal/output variables at different time-steps.
Let x(k) denote the variable at the k
th
time step with
step 0 being the initial step, and for s, t ∈ Z
≥0
, s ≤ t :
X[s,t] := {x(k)|x ∈ X, k ∈ [s,t]} be the variables over
the time interval [s,t].
Example 3.1. Consider a cascade of two identi-
cal components with input/output pairs (u, x) and
(x, y), and with properties x(k) > u(k-1) and y(k) >
x(k-1) respectively, whereas the common variable x
represents the cascade connection. Then one can
see that composed system satisfies y(k) > u(k-2).
But a standard quantifier elimination as in (1) can-
not be employed to obtain the above final for-
mula since the term u(k-2) is not even present
“ReLIC: Reduced Logic Inference for Composition” for Quantifier Elimination based Compositional Reasoning
535

in the component properties. However, if we
compose the component properties and their one-
time-step shifted replicas with the internal vari-
able x(k), x(k-1), and x(k-2) existentially quanti-
fied: ∃x(k)∃x(k-1)∃x(k-2)
(x(k) > u(k-1)) ∧ (y(k) >
x(k-1)) ∧ (x(k-1) > u(k-2))∧(y(k-1) > x(k-2))
, then
upon quantifier elimination, we do get the desired
composed property: y(k) > u(k-2). To account for
the number of time-shifts involved in the component
properties versus the system properties, we introduce
the notion of “order”.
Definition 3.1. We define component/system or-
der as the difference of maximum and minimum
time-shifts present in its governing difference equa-
tions/inequations.
As illustrated in above example, the component
properties may need to be time-shifted to match
the possibly higher order of the governing equa-
tions/inequations of the composed system. In order
to decide the number of time-shifts needed, the order
M
sys
of the composed system must be estimated. This
is presented in the following theorem, which states
that an upper bound for the system order is the sum of
all its component orders.
Theorem 3.1. Given a system of N multi-input-
multi-output (MIMO) components, if the i
th
compo-
nent is of order M
i
, then
∑
N
i=1
M
i
is an upper bound
for the system order M
sys
.
Proof. Without loss of generality, pick any two com-
ponents of S with orders M
1
and M
2
respectively.
Each component possesses a set of properties speci-
fied as nonlinear difference equations/inequations in
the general form of f (·) ∼ 0, where ∼∈ {>, ≥, =}.
For an inequation, we can introduce a slack variable
u
f
∼ 0 such that the given difference inequation can
equivalently be written as the conjunction of a differ-
ence equation f (·) − u
f
= 0 and an extra linear con-
straint u
f
∼ 0. Note this additional constraint is of
zero order and hence can not alter the overall order.
For the set of difference equations of component i
with N
i
inputs (including slack variables) and O
i
out-
puts, i = 1, 2, it is known that there exists an equiv-
alent state-space representation (Fadali and Visioli,
2012), and also the number of the state variables
equals the order of the component. The general form
of such a state-space representation for component i
is:
x
i
(k+1) = f
i
x
i
(k), u
i
(k)
,
y
i
(k) = g
i
x
i
(k), u
i
(k)
,
where vectors u
i
(size: N
i
× 1), x
i
(size: M
i
× 1), and
y
i
(size : O
i
× 1) are respectively the input, state, and
output variable vectors of component i. (The con-
straints on the added slack variables also exist, but as
noted, do not involve time-shifts and so do not alter
the component order.) f
i
(·) (size: M
i
× 1) and g
i
(·)
(size: O
i
× 1) are vectors of functions.
One can simply stack the two state space repre-
sentations into a single one:
x
1
(k+1)
x
2
(k+1)
=
f
1
x
1
(k), u
1
(k)
f
2
x
2
(k), u
2
(k)
,
y
1
(k)
y
2
(k)
=
g
1
x
1
(k), u
1
(k)
g
2
x
2
(k), u
2
(k)
.
It is then clear that the number of states of these, so far
unconnected components, equals the sum of the num-
bers of states of the two individual components. We
claim that when the components are connected, the
state size does not grow, from which the desired re-
sult stated in the theorem can be obtained. A general
connectivity relation between two components can be
formulated as u
c
= y
c
where u
c
is a vector of inputs
from the union of the two component inputs, and y
c
is
a vector of outputs from the union of two component
outputs. We note that one input can only connect to
one output whereas one output may connect to mul-
tiple inputs. Since the overall connected system can
be obtained by iteratively adding one connection at a
time, it suffices to show that adding a single connec-
tion does not introduce an additional state variable.
For compactness of notation, let the state-space rep-
resentation of the combined system be:
x(k+1) = f
x(k), u(k)
,
y(k) = g
x(k), u(k)
,
where the state set has M
1
+ M
2
variables. Sup-
pose a single connection (u
p
, y
q
) is introduced within
the system, where u
p
∈ u, y
q
∈ y, and u
p
, y
q
are
from different components. Let u
0
(resp. y
0
) be the
vector after removing u
p
(resp. y
q
) from u (resp.
y). Then, we have u
p
(k) = y
q
(k) = g
q
x(k), u(k)
=
g
q
x(k), u
0
(k)
with g
q
∈ g, and so the state-space
representation can be written as:
x(k+1) = f
x(k), u
0
(k), g
q
x(k), u
0
(k)
,
y(k) = g
x(k), u
0
(k), g
q
x(k), u
0
(k)
.
Then it is easily seen that the updated state-space rep-
resentation possesses input variables from u
0
(u
p
be-
comes internal), output variables from y (or y \ {y
q
}
if y
q
also becomes internal), while the state-space re-
mains x. (Further simplification and a state-space re-
duction may be possible.) It follows that the system
order of the connected system remains upper bounded
by M
1
+M
2
. The result of the theorem then follows by
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
536

iteratively connecting more components to the com-
position.
Note any component may be described by a set
of properties over its own input, internal, and output
variables, and thus can be viewed as a set of sub-
components, each associated with one of those prop-
erties, and with their connectivity relation implied by
their common variables. Hence we have the following
corollary:
Corollary 3.1.1. The order of a component is
bounded by the sum of all its property orders. The
system order of S in Theorem 3.1 is bounded by the
sum of all the individual property orders of all its
components.
After the composed system order bound M
sys
is
determined, the i
th
individual property of the compo-
nents can be replicated M
sys
-M
i
times, where M
i
is
the order of the i
th
individual property (so it is de-
fined over variables X[k, k+M
i
]), and the j
th
replica
shifted j time-steps ( j = 1, . . . , M
sys
+M
i
) to obtain
the set of all constraints over X [k, k+M
i
] ∪
1≤ j≤M
sys
-M
i
X[k+ j, k+ j+M
i
] = X[k, k+M
sys
].
Theorem 3.2. The strongest system property of a
time-dependent system (time-dependent version of S)
can be obtained from the replicated and time-shifted
components properties by:
∃∃X
int
[k, k+M
sys
]
^
component properties
& shifted replicas over X[k, k+M
sys
]
, (2)
where the existential quantification is with respect
to the set of internal variables X
int
[k, k+M
sys
] ⊆
X[k, k+M
sys
] of the system.
Remark. Theorem 3.1 provides an upper bound to the
system order, while the actual system order M
sys
may
be less than the upper bound
∑
N
i=1
M
i
. In the case, the
result of the QE in (2) will contain the conjunction
of
∑
N
i=1
M
i
-M
sys
redundant expressions that are time-
shifted replicas of some other expressions within the
same conjunct. Such replicas can be dropped, without
altering the resultant property, reducing the order to
equal M
sys
.
Example 3.2. Consider three properties z = y + x,
y = pre(u), and x = pre(w), where x and y are in-
ternal variables, and the operation pre denotes the
value at the previous step. Then, from Theorem 3.1,
the system order is upper bounded by the sum of the
three subsystem orders: 0 + 1 + 1 = 2. On the other
hand, it is easy to see that the composed property
over the external variables z, u, and w is z = y + x =
pre(u) + pre(w), which is only of order 1. The com-
putation of the composed property using our approach
requires shifting each components by its order differ-
ence with the upper bound (so, 2, 1, 1 resp.), and then
combining those using (2):
∃x(k)∃x(k+1)∃x(k+2)∃y(k)∃y(k+1)∃y(k+2)
z(k) = y(k) + x(k)
∧
z(k+1) = y(k+1) + x(k+1)
∧
z(k+2) = y(k+2) + x(k+2)
∧
y(k+1) = u(k)
∧
y(k+2) = u(k+1)
∧
x(k+1) = w(k)
∧
x(k+2) = w(k+1)
.
Upon the elimination of the quantified variables, we
can obtain:
z(k+1) = u(k) + w(k)
∧
z(k+2) = u(k+1) + w(k+1)
,
in which z(k+2) = u(k+1) + w(k+1) is a one-step
shifted replica of z(k+1) = u(k) + w(k), and hence re-
dundant, and so it can be dropped without altering the
derived system property. By expressing the QE result
in conjunctive normal form (CNF), the redundant ex-
pressions can be readily identified as the time-shifted
replicas of some other expressions, and eliminated.
Similarly, we can also derive the system initial
condition by composing the ones of the components.
Then a postulated system property can be verified us-
ing an induction-based proof (Sheeran et al., 2000;
Kahsai and Tinelli, 2011). For a system of or-
der M
sys
, initial conditions over the first M
sys
steps
(0, . . . , M
sys
-1) suffice. So the system-level initial con-
dition can be obtained using:
∃∃X
int
([0, M
sys
-1])
^
component properties
& shifted replicas over X([0, M
sys
-1]) & ICs
, (3)
where ICs denotes the initial conditions.
Example 3.3. Consider the same example given at
the beginning of this section with the component
properties and initial conditions: y > pre(x), y(0) > 0
and x > pre(u), u(0) > 1. Then in this case, (3) is
encoded as: ∃∃y([0, 1])
(z(0) > 0) ∧ (z(1) > y(0)) ∧
(y(0) > 1) ∧ (y(1) > x(0))
, which is equivalent to
(z(0) > 0) ∧ (z(1) > 1) by eliminating the existen-
tially quantified internal variable y at the time-steps
0 and 1, namely, y(0) and y(1).
4 IMPLEMENTATION AND
EXPERIMENTAL RESULT
We implemented the QE-based the time-independent
and time-dependent property composition in a tool,
which we refer as ReLIC (Reduced Logic Inferencing
for Composition). The architecture of our prototype
“ReLIC: Reduced Logic Inference for Composition” for Quantifier Elimination based Compositional Reasoning
537
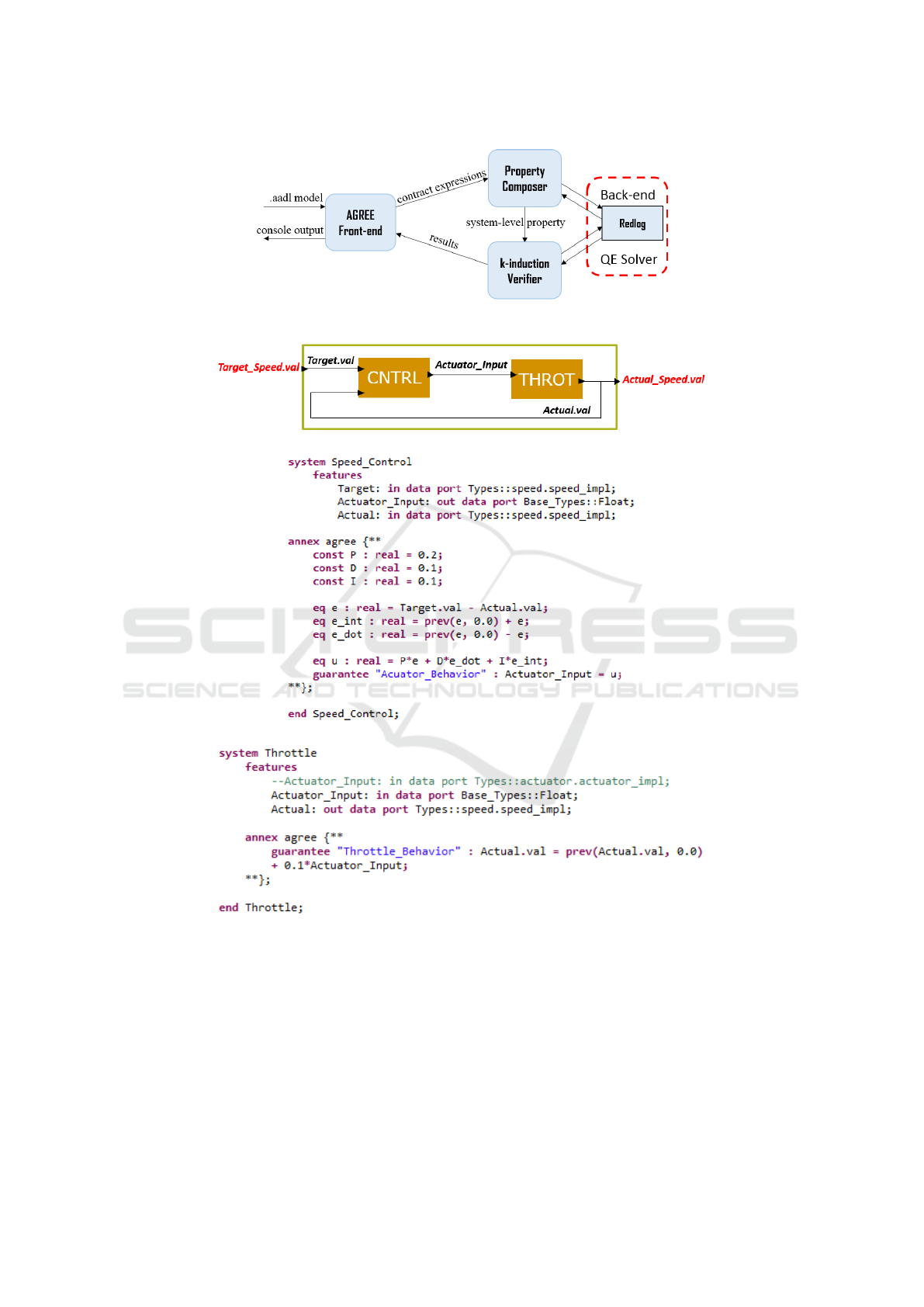
Figure 1: Architecture of ReLIC.
(a) A vehicle model and its components dynamics.
(b) Specification of CNTRL component.
(c) Specification of THROT component.
Figure 2: A vehicle model, modified from (Gacek et al., 2017).
tool ReLIC is shown in Fig. 1. It utilizes the front-end
infrastructure of the AGREE (Stewart et al., 2017) tool
for capturing and parsing the input AADL models that
describe the components, their connectivity, and their
properties, and also its output environment for pre-
senting the property composition and verification re-
sults to the console. The “Property Composer” mod-
ule computes the upper bound for the system-level or-
der based on Theorem 3.1 and computes the strongest
system-level property based on Theorem 3.2. This
is then used by the “Induction Verifier” module to
perform induction-based system-level verification of
a postulated system property. Both these modules uti-
lize Redlog (red, 2015) as a back-end solver that sup-
ports quantifier elimination.
To demonstrate our tool, we tested it on a vehi-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
538
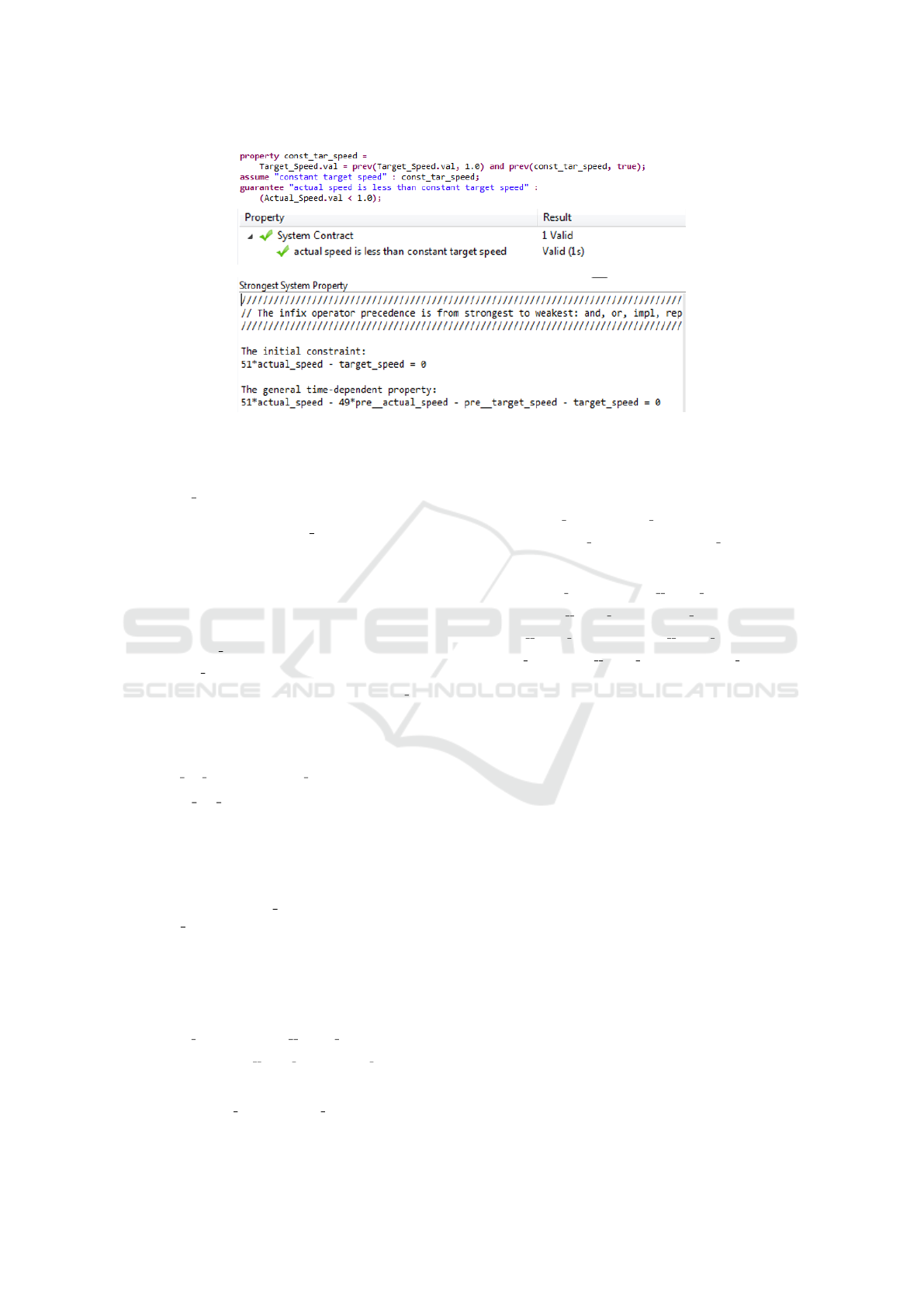
Figure 3: ReLIC verification output on the vehicle model.
cle model as shown in Fig. 2a. The vehicle consists
of two components, namely, a PID control compo-
nent “Speed Control” (CNTRL) and a vehicle throt-
tle “Throttle” (THROT), within a feedback configura-
tion. The dynamics of “Speed Control” is specified
by a set of difference equations involving also cer-
tain state variables (Fig. 2b), whereas the dynamics of
“Throttle” is specified by a difference equation over
only its input and output variables (Fig. 2c).
There are three first-order expressions in total,
namely,
e int = prev(e, 0.0) + e,
e dot = prev(e,0.0) − e, and
Actual.val = prev(Actual.val, 0.0) + 0.1 ∗ Actuator Input,
where prev(·) is the extended delay operator pre(·)
with the second argument denoting the initial value.
The postulated system property is
const tar speed ⇒ (Actual Speed.val < 1.0),
where const tar speed is a Boolean variable whose
truth indicates system target speed is set to a con-
stant value 1.0 (its defining expression is given in
Fig. 3). The ReLIC inferred strongest system prop-
erty (based on (2) and (3)) contains the system-level
difference equation as well as the initial condition
over system input Target Speed.val and system out-
put Actual Speed.val. While the upper bound for the
composed system order is 3, it turns out that the sys-
tem input-output property order is only 1 due to the
inherent parallelism among the components, as also
computed by our approach (see the encoded expres-
sions below as well as the console output in Fig. 3):
51 ∗ actual speed − 49 ∗ pre actual speed
−pre target speed − target speed = 0,
with the initial condition:
51 ∗ actual speed −target speed = 0.
These are easily shown to imply the postulated
system property using induction, where the base step
is:
(51 ∗ actual speed −target speed = 0) ⇒
(target speed = 1) ⇒ (actual speed < 1)
,
and the inductive step is
(51 ∗ actual speed −49 ∗ pre actual speed
−pre target speed −target speed = 0)
∧(pre target speed = 1) ∧ (pre actual speed < 1)
⇒
(target speed = pre target speed) ⇒ (actual speed < 1)
.
Both the base and induction steps can be veri-
fied to be true, again using quantifier elimination, this
based on universal quantification over the external
variables.
5 CONCLUSION
We introduced for a first-time a property composi-
tion framework to support the composition of time-
dependent properties. This is a foundational step to-
wards compositional reasoning of systems possessing
bounded “memory”. The extension developed a new
procedure to determine the system order, given the
component orders, and used it to form the required
time-shifted replicas of the component properties and
their QE-based composition. We implemented our
compositional approach in our prototype tool ReLIC
that uses AADL for modeling system architecture and
component properties using the tool AGREE, and the
QE solver Redlog at the back-end for performing the
QE. The proof of a postulated system-level property
involves induction, which is also supported in our
ReLIC tool.
“ReLIC: Reduced Logic Inference for Composition” for Quantifier Elimination based Compositional Reasoning
539

ACKNOWLEDGEMENTS
This work was partially supported by the National
Science Foundation under the grants NSF-CCF-
1331390, NSFECCS-1509420, NSF-IIP-1602089,
and a sabbatical support from the Air Force Research
Lab, Dayton, OH.
REFERENCES
(2012). Agree. Available from:
http://loonwerks.com/tools/agree.html.
(2015). redlog. Available from: http://www.redlog.eu/.
Emmi, M., Giannakopoulou, D., and P
˘
as
˘
areanu, C. S.
(2008). Assume-guarantee verification for interface
automata. In International Symposium on Formal
Methods, pages 116–131. Springer.
Fadali, M. S. and Visioli, A. (2012). Digital control engi-
neering: analysis and design, chapter 7. State-Space
Representation. Academic Press.
Feiler, P. H., Gluch, D. P., and Hudak, J. J. (2006). The ar-
chitecture analysis & design language (aadl): An in-
troduction. Technical report, Carnegie-Mellon Univ
Pittsburgh PA Software Engineering Inst.
Gacek, A., Backes, J., Mike, W., Darren, C., and Jing, L.
(2017). Agree users guide, v0.9. Available from:
https://github.com/smaccm/smaccm/tree/master/ doc-
umentation/agree.
Gacek, A., Katis, A., Whalen, M. W., Backes, J., and Cofer,
D. (2015). Towards realizability checking of contracts
using theories. In NASA Formal Methods Symposium,
pages 173–187. Springer.
Kahsai, T. and Tinelli, C. (2011). Pkind: A parallel
k-induction based model checker. arXiv preprint
arXiv:1111.0372.
Kingston, D., Rasmussen, S., and Humphrey, L. (2016).
Automated uav tasks for search and surveillance. In
Control Applications (CCA), 2016 IEEE Conference
on, pages 1–8. IEEE.
Quinton, S. and Graf, S. (2008). Contract-based verification
of hierarchical systems of components. In 2008 Sixth
IEEE International Conference on Software Engineer-
ing and Formal Methods, pages 377–381. IEEE.
Rasmussen, S., Kalyanam, K., and Kingston, D. (2016).
Field experiment of a fully autonomous multiple
uav/ugs intruder detection and monitoring system. In
Unmanned Aircraft Systems (ICUAS), 2016 Interna-
tional Conference on, pages 1293–1302. IEEE.
Ren, H., Clark, M., and Kumar, R. (2018). Integration of
quantifier eliminator with model checker and compo-
sitional reasoner. In 2018 IEEE 14th International
Conference on Control and Automation (ICCA), pages
1070–1075. IEEE.
Ren, H., Clark, M. A., and Kumar, R. (2016). Integration of
quantifier eliminator with model checker and compo-
sitional reasoner. In Air Force Research Laboratory’s
Safe & Secure Systems and Software Symposium.
Sheeran, M., Singh, S., and St
˚
almarck, G. (2000). Check-
ing safety properties using induction and a sat-solver.
In International conference on formal methods in
computer-aided design, pages 127–144. Springer.
Stewart, D., Whalen, M. W., Cofer, D., and Heimdahl,
M. P. (2017). Architectural modeling and analysis for
safety engineering. In International Symposium on
Model-Based Safety and Assessment, pages 97–111.
Springer.
Tarski, A. (1998). A decision method for elementary al-
gebra and geometry. In Quantifier elimination and
cylindrical algebraic decomposition, pages 24–84.
Springer.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
540
