
Distributed Anomaly Detection of Single Mote Attacks in RPL Networks
Nicolas M. M
¨
uller, Pascal Debus, Daniel Kowatsch and Konstantin B
¨
ottinger
Cognitive Security Technologies, Fraunhofer AISEC, Garching near Munich, Germany
Keywords:
Intrusion Detection, IoT, Machine Learning, RPL.
Abstract:
RPL, a protocol for IP packet routing in wireless sensor networks, is known to be susceptible to a wide range
of attacks. Especially effective are ’single mote attacks’, where the attacker only needs to control a single
sensor node. These attacks work by initiating a ’delayed denial of service’, which depletes the motes’ batteries
while maintaining otherwise normal network operation. While active, this is not detectable on the application
layer, and thus requires detection on the network layer. Further requirements for detection algorithms are ex-
treme computational and resource efficiency (e.g. avoiding communication overhead) and the use of machine
learning (if the drawbacks of signature based detection are not acceptable). In this paper, we present a system
for anomaly detection of these kinds of attacks and constraints, implement a prototype in C, and evaluate it
on different network topologies against three ’single mote attacks’. We make our system highly resource and
energy efficient by deploying pre-trained models to the motes and approximating our choice of ML algorithm
(KDE) via parameterized cubic splines. We achieve on average 84.91 percent true-positives and less than 0.5
percent false-positives. We publish all data sets and source code for full reproducibility.
1 INTRODUCTION
Wireless sensor networks (WSN) consist of a num-
ber of embedded devices, called motes, which have
a number of distinct characteristics. They run on
battery, communicate wirelessly, are comparatively
cheap, and thus have only very limited computational
capacity and memory. This is why they cannot run
the usual TCP/IP network stack, but use specifically
designed protocols such as RPL (Alexander, 2012).
RPL allows for routing between low-power devices
communicating via possibly lossy links. It has be-
come an industry standard due to its effectiveness.
Like all computer systems, motes are vulnerable
to cyber attacks. Coarse attacks such as jamming
shut down the network, which is why they are eas-
ily detected on the application layer. Additionally,
executing these attacks requires comparatively high
resources. Far more harmful are attacks such as Ver-
sion Number or Hello Flood, for which the attacker
only needs to control a single mote of the WSN (Wall-
gren, 2013). These attacks exhaust the batteries of the
motes in the WSN in a very short time and become
noticeable on the application layer only after the net-
work has already collapsed due to a lack of power
supply. Thus, it is very important to detect these at-
tacks already during the execution. Since the attacks
may vary, a generic anomaly detection system is de-
sirable, which is why machine learning (ML) tech-
niques may be useful. Additionally, detection has to
be extremely resource efficient due to the motes’ very
limited resources.
In this paper, we present an anomaly detection
system suited to the requirements described above. In
summary, our contribution is as follows.
• We fill a gap in existing research (see Section 2)
by presenting a ML-based system which can re-
liably detect single mote attacks such as Hello
Flood, Version Number, and Blackhole.
• We accommodate anomaly detection to a heavily
resource-constrained environment: We use pre-
trained models to avoid data collection and model
training on the motes, use a distributed architec-
ture to avoid communication overhead, and opti-
mize semi-supervised learning algorithms for low
computational overhead.
• We thoroughly evaluate our system by implement-
ing a prototype in C.
• We provide source code and data sets for repro-
ducibility
1
.
1
github.com/mueller91/single-mote-attacks
378
Müller, N., Debus, P., Kowatsch, D. and Böttinger, K.
Distributed Anomaly Detection of Single Mote Attacks in RPL Networ ks.
DOI: 10.5220/0007836003780385
In Proceedings of the 16th International Joint Conference on e-Business and Telecommunications (ICETE 2019), pages 378-385
ISBN: 978-989-758-378-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved

2 RELATED WORK
There are multiple approaches for anomaly detection
in RPL-based WSNs. These can be classified accord-
ing to three criteria. First, anomaly detection can be
either machine learning (ML) based or signature/rule
based. Second, anomaly detection can be either cen-
tralized or decentralized. In a centralized system, ev-
ery mote sends the relevant data to a central mote,
mostly the RPL root mote which has a wired power
supply. A decentralized system runs in a distributed
manner, meaning that the data is processed on every
mote itself rather than sent to a central agent. Third,
anomaly detection in RPL-based WSNs can be cate-
gorized by its scope: The system may be designed to
detect anomalies in the payload data (layer 7 of the
OSI model), such as a deviation in the mote’s mea-
sured quantity, or to protect the WSN itself, for ex-
ample against attacks against its topology (layer 3).
Table 1 presents a summary of related work, clas-
sified with the above criteria. While there are a num-
ber of anomaly detection systems for WSN, we find
that there is a shortage of research on systems that
1. use machine learning to allow for detecting novel
attacks,
2. are decentralized, and
3. are designed to protect the WSN itself, e.g. detect
anomalies in layer 3.
We argue that such a system (ML based, decentral-
ized, on layer 3) is highly desirable due to the fol-
lowing reasons. First, since our goal is to detect
single-mote attacks as they occur, we need to dis-
cover these attacks on ISO-OSI layer 3. Second, cen-
tralized anomaly detection (where there is continuous
communication from the mote to the root) is not fea-
sible with battery powered devices. This is because
the process of sending data packets consumes a lot
of power compared to computation and data recep-
tion (D’Hondt, 2015). Finally, with the drawbacks of
signature based detection (expensive both in human
work and money, possibly not robust to small changes
in the attack pattern), a ML-based approach is highly
desirable. However, existing work which employs de-
centralized detection on layer 3 refrains, to the best of
our knowledge, from the use of machine learning (c.f.
Table 1). Thus, in the rest of this paper we present
such an approach.
3 RPL BACKGROUND
RPL is a layer 3 (ISO-OSI) protocol which provides
routing capabilities to low power devices communi-
Table 1: Work on anomaly detection (AD) on RPL-based
WSNs, categorized by detection method (ML: Machine
Learning based, S: Signature based), agent positioning (c:
centralized, dc: decentralized) and detection scope with re-
spect to OSI Layer model.
Summary
Methodol-
ogy / Type
/ Layer
Evaluation of various models on
synthetically-created payload (layer 7)
data. (Bosman, 2016)
ML / dc / 7
Distributed KNN for payload data AD,
minimizes communication by
clustering sensor measurements.
(Rajasegarar et al., 2006)
ML / dc / 7
Clustering based, partitions data space
using fuzzy C-means algorithm in an
incremental mode. (Kumarage et al.,
2013)
ML / dc / 7
Centralized, detects Selective
Forwarding Attacks using SVMs and
sliding windows. High communication
overhead. (Kaplantzis et al., 2007)
ML / c / 3
Centralized via Neural Net running on
a Desktop PC. (Almomani et al., 2016)
ML / c / 3
Signature-based approach on all
network stack layers. (Bhuse and
Gupta, 2006)
S / dc / 3
Detects set of pre-defined attacks using
a combination of signature-based
approaches. (Raza et al., 2013)
S / dc / 3
Rule-based detection using separation
of motes into guard nodes and
communication nodes. (Hoang et al.,
2015)
S / dc / 3
cating over lossy links. Starting from a single root
node (which usually has a wired power and internet
connection), RPL constructs a Destination Oriented
Directed Acyclic Graph (DODAG). This is a usually
tree-like structure where the root is the wired node
and the wireless motes are the internal nodes and
leaves. In order to track changes, a DODAG version
number is used. If the DODAG version number in-
creases, the DODAG will be reconstructed. Messages
can be sent from the wireless motes by forwarding
messages upwards in the direction of the root. Motes
may change their parents, based on the optimization
of various parameters such as energy consumption or
loss (Alexander, 2012). Each node determines its par-
ents based on their rank, which is calculated based on
the objective function and can be viewed as an ab-
stract distance from the root node. Fig. 1 shows an
example of such a topology. RPL has been designed
to be very resource efficient, and introduces routing
capabilities to tiny devices which are unable to run
the full TCP/IP stack (Alexander, 2012).
Distributed Anomaly Detection of Single Mote Attacks in RPL Networks
379

Figure 1: Example of a WSN topology, where the RPL pro-
tocol has created a DODAG connecting the WSN’s motes to
the root mote (node 0). An arrow connecting two motes in-
dicates a child-parent relationship. Any mote can send data
to the root by sending a packet to its parent, which in turn
forwards it to its parents, until the packet reaches the root.
4 ATTACK SCENARIO
In this Section we present the attack scenario consid-
ered in this paper. For this, we will first define the
threat model specifying the theoretical capabilities of
the attacker and then shortly explain three representa-
tive attacks which are used for evaluation.
4.1 Threat Model
Different threat models on WSNs can be distin-
guished by how powerful the attacker is. For example,
if the attacker has free access to the area where the
WSN is located, he can place a jammer that blocks
the medium and all communication of the WSN (De-
nial of Service). However, the WSN may be located
in a closed area, e.g. a factory building, to which the
attacker has no easy access. If the attacker is able to
control a larger number of motes, he can achieve simi-
lar effects to jamming, e.g. by network segmentation.
However, this scenario is often not realistic either, and
the attacker may be limited to introducing very few or
only a single malicious mote into the network. This
is the case, for example, with more extensive physical
access controls, where the attacker has to take over or
smuggle in motes at high cost. The rest of this paper
is based on this threat model: The attacker controls
exactly one mote (malicious mote) of the entire WSN
and his goal is to cause as much damage as possible
with these very limited resources.
4.2 Evaluated Attacks
A number of single mote based attacks on RPL are
known, but nearly all are variations of DIO flooding,
illegitimate version number increase, or rank spoof-
ing. Thus, we chose three representatives of these
build blocks to evaluate our system against. (Pongle
and Chavan, 2015)
• Version Number Attack. This attack increases
the version number, forcing unnecessary graph re-
buildings. This attack affects the availability of
the network, since the additional overhead drains
the nodes’ batteries.
• Hello Flood Attack. A flooding attack, causing
nodes within range to send large amounts of re-
sponse packets. The attacker’s goal is to affect
availability by making the network unstable and
causing the sensor nodes to rapidly deplete their
batteries.
• Blackhole Attack. This attack establishes a Sink-
hole by advertising a very low rank, making itself
very attractive to surrounding motes. These con-
sequently select the malicious mote as their par-
ent, resulting in all of their traffic flowing through
the attacker, who may then choose to drop all
packets (Blackhole) or only a few selected (Grey-
hole).
5 SYSTEM OVERVIEW
In this Section we present our system in detail. It con-
sists of the following steps.
First, every node pipes the packages it receives to
the anomaly detection engine, where appropriate fea-
tures are extracted (see Section 5.1). Second, a pre-
trained model is selected depending on the number
of nodes in the node’s communication range (Sec-
tion 5.2). Third, the model is evaluated on new data
points as they come in. If the anomaly score falls
below a pre-defined threshold α, the system sends
an anomaly notification packet to its neighbors via
broadcast, which the receiving nodes forward to the
root. We detail these steps in Section 5.3. We now
proceed to illustrate the individual steps in detail.
5.1 Feature Construction
For security anomaly detection in RPL-based WSNs,
we construct the following features, which are con-
structed on every node in the network topology inde-
pendently.
Count of DIS, DIO and DAO Packets. Over a
window of 15 seconds we aggregate the number of
DODAG Information Solicitation (DIS), DODAG In-
formation Object (DIO), and Destination Advertise-
ment Object (DAO) packets a node receives.
SECRYPT 2019 - 16th International Conference on Security and Cryptography
380

Number of DODAG Versions. Over a window
of 500 seconds we count the number of different
DODAG versions.
UDP forward Ratio. Define the neighborhood
N(m) of a node m to be the set of nodes in the WSN
that are within communication range of m. For all
o ∈ N(m), let to(o, m) be the number of UDP pack-
ets sent to a given node o as observed by m, and let
f rom(o, m) be the number of UDP packets sent from
o observed by m.
Note that m may not observe all UDP packets sent
to o due to communication range limitations, but is
guaranteed to observe all packets sent from o, since
they are in communication range (except for inherent
packet loss due to the network’s lossy links). We de-
fine the maximum UDP forward ratio as
r(m) := max
o∈N(m)
to(o, m)
from(o, m)
. (1)
Intuitively, every node m takes note how the nodes
in its neighborhood forward UDP packets. If a given
node receives a lot of packets, but forwards none or
only very few, this may indicate a Blackhole attack.
We chose these features because first, we consider
them to carry meaningful information about the sta-
tus of our network, and second because feature selec-
tion via grid search has shown that these features are
indeed the most useful for detecting network anoma-
lies.
5.2 Model Construction and Selection
In this subsection, we describe our choice of ML
model. We especially consider how to minimize com-
putation and memory consumption once the model is
deployed to the sensor nodes.
5.2.1 Model Selection
The foundation of our anomaly detection system is
Kernel Density Estimation (KDE), a technique to ap-
proximate a density function f . We choose this model
because of the following reasons. First, it offers some
degree of probabilistic explainability: Given a thresh-
old, KDE returns a range of ’normal’ and ’anomalous’
values together with the corresponding probabilities,
which may help network operators to better under-
stand the nature of anomalies that occur. SVM allows
only for distance-based explainability, while Auto-
Encoders provide none. Second, KDE is adaptable to
heavily resource constrained environments (see Sub-
section 5.2.3). We refrained from using other poten-
tially interesting models such as an Auto-Encoder or
HMM due to the following reasons.
1. HMMs are not easily adaptable to a heavily re-
source constrained environment such as sensor
motes. This is because the necessary inference
algorithm (the ’forward algorithm’) has complex-
ity θ(nm
2
) (where n is the sequence length and m
the number of hidden variables). This exceeds the
computations necessary if spline-approximated
KDE is used (see Section 5.2.3).
2. While Auto-Encoders (AE) are useful for
anomaly detection in general, they are ill suited
to our task due to the following reasons. First, the
computation of nonlinearities such as tanh or exp
requires the evaluation of several higher order
polynomials (Pad
´
e approximation), which ex-
ceeds the computational complexity of evaluating
a cubic spline as is required in our approximation
of KDE (Section 6.3). Second, the reconstruction
error δ is not directly interpretable as a probability
distribution, which we require as described in
Section 6.3.
5.2.2 KDE Background
We chose KDE as our anomaly detection algorithm.
Given a set of N i.i.d. drawn samples x
i
, KDE yields
an estimator
ˆ
f which is given by the following sum
of scaled and translated kernel functions k (usually
Gaussians):
ˆ
f
h
(x) =
1
N
∑
N
i=1
k
x−x
i
h
. The bandwidth
parameter h balances out the estimator’s bias and vari-
ance. We make the simplifying assumption that each
data point x
i
∈ R
D
is independent from all other data
points x
j
∈ R
D
, i 6= j and that all D features are inde-
pendent from each other.
Since our data consists of multivariate vectors
x = [x
1
, .., x
D
]
T
, we adapt univariate KDE as follows:
For each feature x
d
, we train and evaluate a univariate
KDE
ˆ
f
d
. A multivariate data point x is then scored
by the sum of the log-likelihood of the individual
ˆ
f
d
,
s(x) =
∑
D
d=1
log(
ˆ
f
d
(x
d
)). This implicitly assumes that
the features are independent, but avoids the require-
ment to use multivariate KDE, for which the opti-
mizations in Section 5.2.3 are infeasible. The hyper-
parameter h is found using parameter optimization as
follows: Given a data set X, we split it into a training
and a validation set. For a set of real numbers H , for
each h ∈ H , we fit
ˆ
f
d
h
to the training set and evalu-
ate on the validation set, thus finding a parameter h
0
which maximizes s(x).
5.2.3 KDE in a Resource Constrained
Environment
While KDE is a suitable approach to our problem,
it has its downsides. For example, the evaluation of
Distributed Anomaly Detection of Single Mote Attacks in RPL Networks
381
ˆ
f (x) given a new sample x is very expensive, since
for N data points and D features each kernel function
k has to be evaluated and summed up. Computational
complexity and memory consumption are in O(N · D)
and thus prohibitively expensive. To mitigate these
issues, we modify our model as follows.
Model Pre-training. Instead of training our
model on the sensor nodes, we first collect training
data (see Section 6.1 for details) and train our model
on a desktop computer. The training data X con-
sists of the log files from motes. These include the
features as defined in Section 5.1. From the logs
we extract subsets P
X
(m) containing features based
on those packets sent by node m and its neighbors.
Neighbors of node m are all nodes that are within
communication range of m. Let l be the maximal
number of neighbors in the desired WSN. Then, for
j = 1, ..., l, let X
j
be the union of all data points of
all P
X
(m) where m has exactly j neighbors. Finally,
we fit a KDE to each X
j
as described above. Thus, we
obtain up to l models, parameterized by the number of
neighbors. We will thoroughly evaluate this approach
in Section 6.
Spline Approximation. Next, we approximate
our density estimate
ˆ
f using a third-order spline. This
is a function defined piecewise by third-order poly-
nomials. Let m
x
d
be the maximum value of a given
feature x
d
in the training data. We approximate
ˆ
f
in the interval [0, m
x
d
] using k subintervals. Outside
the interval we extrapolate by quadratically decreas-
ing the function, thereby mimicking KDE’s summa-
tion of normal distributions. Let x
d
border
be the value
of the border of feature d at which we want to extrapo-
late. Then our extrapolation is given by the following
equation:
log(
ˆ
f
d
(x
d
)) ≈ −
(x
d
− x
d
border
)
2
2h
2
+ log(
ˆ
f
d
(x
d
border
)).
Note that the computational cost of this approxima-
tion is in O(D), and the disk space required is only in
O(D · l · k), where l ·k is much smaller than N.
Finally, we deploy all up to l spline approxima-
tions to the sensor node. The node periodically checks
how many neighbors it has, and chooses the appropri-
ate spline to evaluate new data points. If, for some
reason, no model for j neighbors has been trained, the
node substitutes with a model for j
0
neighbors such
that | j − j
0
| is minimized.
5.3 Anomaly Detection Workflow
We now proceed to describe the complete anomaly
detection system. First, we begin with the model
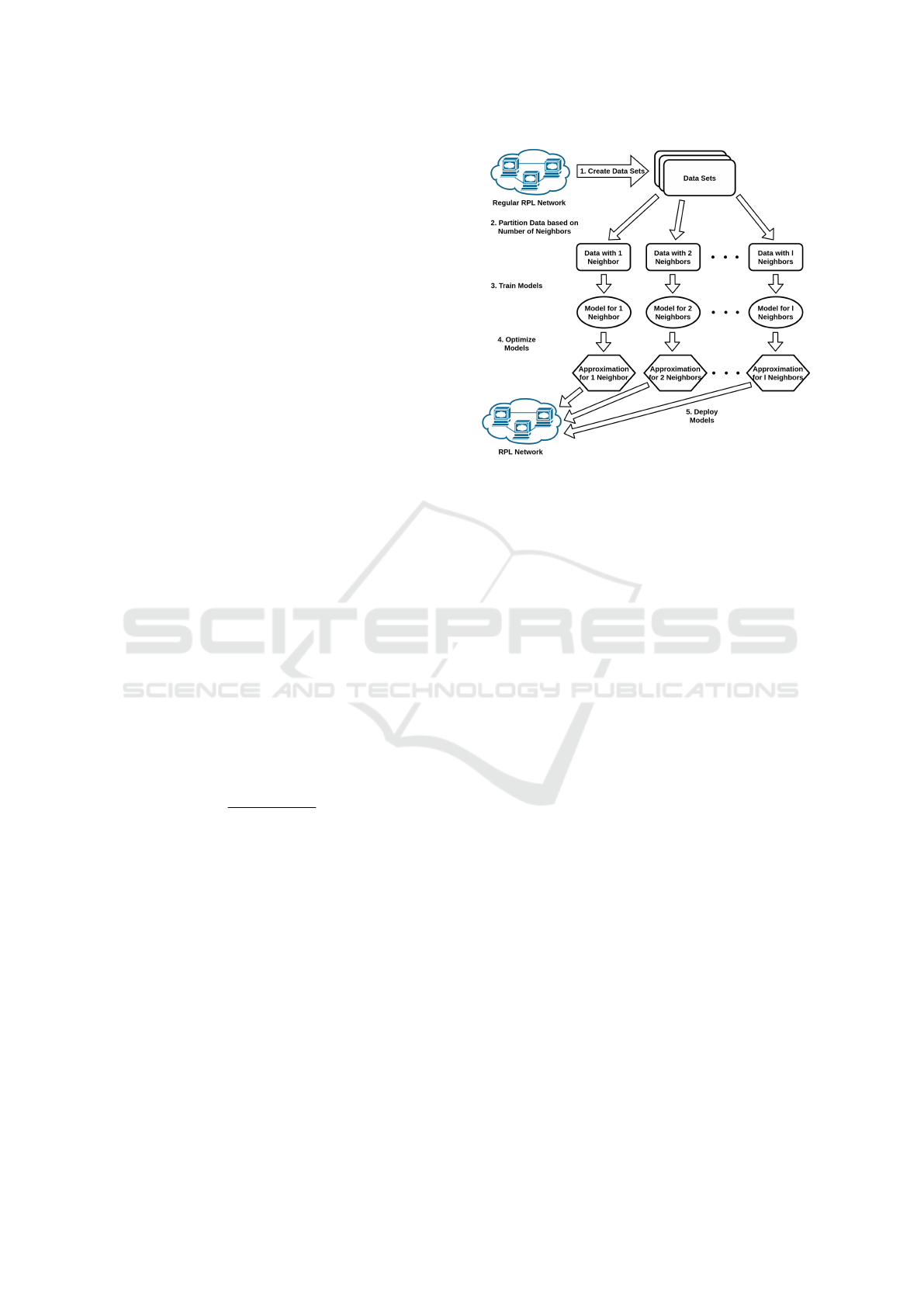
training, which is as follows (see Fig. 2):
Figure 2: Workflow of the model up to deployment.
1. Collect logs from a normally operating WSN.
2. Partition training set by number of neighbors.
Create the training sets X
j
, establishing a base-
line for what a node with j neighbors can expect
a normally functioning RPL network to look like.
3. Model training. For each such training set and
every feature, train a univariate KDE and find the
optimal bandwidth using grid-search.
4. Model Compression. Approximate every log-
KDE density using a univariate cubic spline.
5. Model deployment. Deploy splines to each mote.
The detection workflow is as follows (see Fig. 3):
1. Evaluate anomaly score at all nodes. Evaluate
incoming data using score function s from Sec-
tion 5.2.1, where
ˆ
f
d
is replaced by its spline ap-
proximation.
2. Notify neighbors in case of an anomaly. If the
score is less than a given threshold T , the current
status of the node is considered anomalous. The
node then proceeds to send anomaly notification
packets (ANP) to all neighbors, which in turn for-
ward them to the root.
3. Evaluate ANP at root. If the root receives ANPs
from more than a certain number of motes, it can
raise an alert.
We focus on detecting anomalies, thus sending ANPs
is currently not implemented.
SECRYPT 2019 - 16th International Conference on Security and Cryptography
382
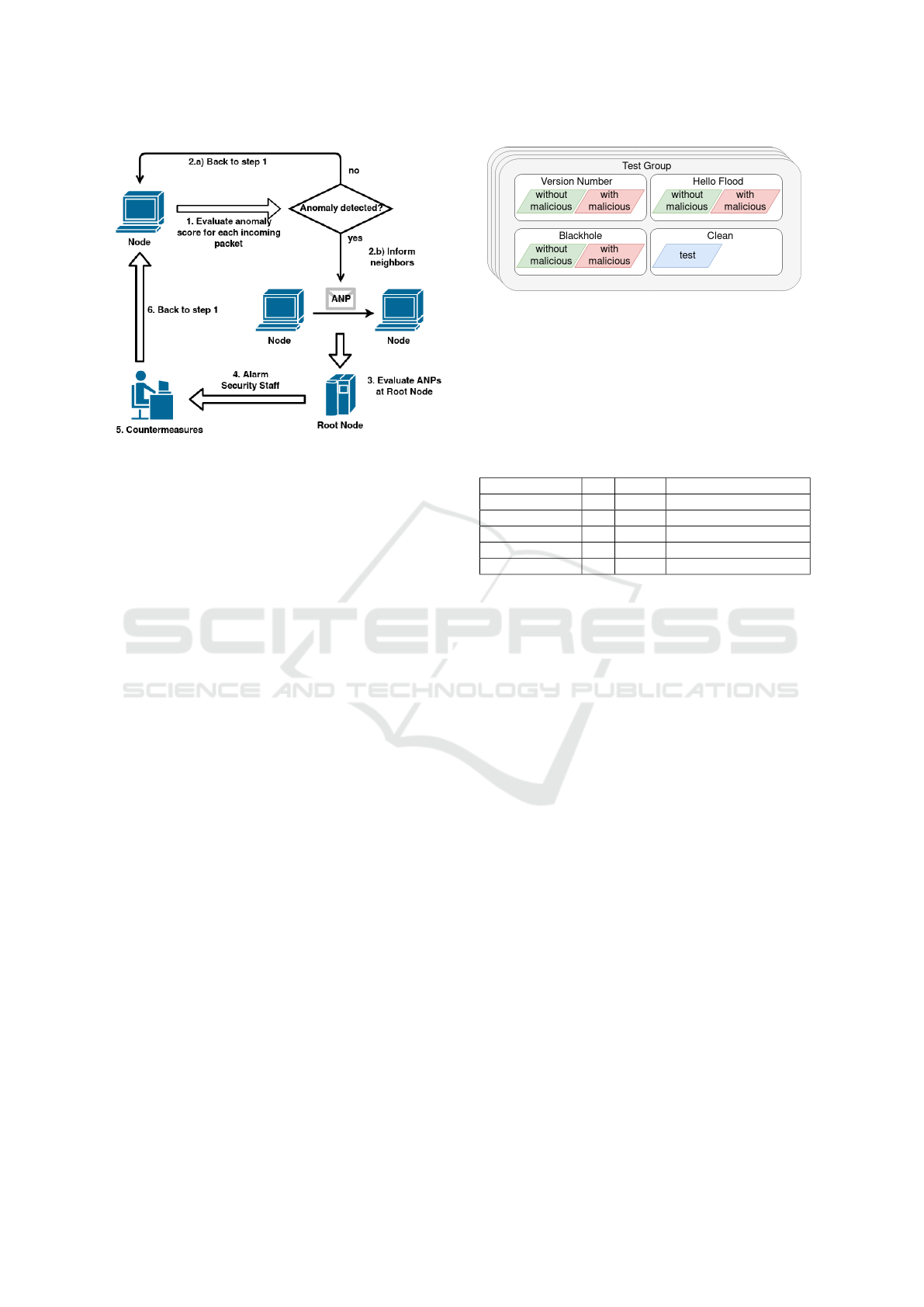
Figure 3: Anomaly detection workflow.
6 IMPLEMENTATION AND
RESULTS
In this Section we present our data sets, details of
our implementation, and preliminary results. In our
implementation, we use H = numpy.logspace(-4, 4,
num=25), T = −23.88 for τ = 1% FP in the training
set, l = 5 and k = 5.
6.1 Data Sets
All data used in this project is obtained by simulat-
ing RPL-based networks in the Cooja network sim-
ulator (Dunkels et al., 2004). In order to simulate
the attacks, we use a modified version of the RPL At-
tacks Framework (D’Hondt, 2015). We create 20 test
groups comprising 80 individual data sets, as shown
in Table 2. Each data set consists of two sub data sets:
One with and one without malicious node. We call
the former malicious, the latter non-malicious data
set. The only exception to this is the Clean set, which
consists of a single non-malicious set we call test set.
The reason for this separation will become apparent
in Section 6.2. Each of these sub data sets contains
all features based on packets received throughout the
simulation. See Fig. 4 for a visual representation of
this.
6.2 Implementation
We implement our system in C using Contiki OS
and Cooja to simulate Zolertia Z1 motes with
MSP430X series CPU. We train exclusively on the
non-malicious data, test on the malicious data, and
use the Clean data to evaluate the false positive rate.
Figure 4: Layout of the data we use. There are 20 Test
Groups, each containing four data sets. Except for the Clean
set, each data set contains two subsets, one with malicious
node and one without.
Table 2: Overview of the data sets we use for evaluating our
system. Each Test Group contains four individual data sets,
as shown in Fig. 4. The topology (r)ectangle is a pre-defined
grid, neighbors, (q)uadrants is a completely random layout
and (g)rid arranges the motes in layers around the root mote.
M denotes the number of nodes in the simulation.
Test Group Nr. M Topo. Simul. duration [sec]
1, 2, 3, 4 7 (r) 800, 1000, 1200, 1400
5, 6, 7, 8 7 (q) 800, 1000, 1200, 1400
9, 10, 11, 12 12 (q) 800, 1000, 1200, 1400
13, 14, 15, 16 9 (g) 800, 1000, 1200, 1400
17, 18, 19, 20 12 (g) 800, 1000, 1200, 1400
6.3 Anomaly Threshold
The selection of the anomaly threshold is a common
problem in the field of anomaly detection which we
approach statistically, using test theory. As described
in Section 5.3, the detection workflow has two stages:
Anomaly scoring at mote-level and anomaly notifica-
tion packets (ANP) evaluation at the root-level where
the final alert decision is made. This leads to one
threshold T for the mote-level detection and a min-
imal number of ANPs threshold k at root-level. In
the following, we define T to be the τ-percentile of
our non-malicious data scores which results, by defi-
nition, in a false positive rate of τ for the mote-level
detectors. In statistical tests, the maximum accept-
able probability of a false positive (Type I error) is
known as significance level. Hence, τ can be inter-
preted as such. To determine the critical number of
ANPs, we employ the following binomial test: Let
X
t
be a random variable representing the number of
ANPs received in a time slot t and n the number of
nodes in the network. We use the simplifying assump-
tion that, in the absence of an attack, motes send an
ANP with probability p independently of each other
such that X
t
follows a binomial distribution B(n, p)
for all t. We formulate the null hypothesis H
0
: p = τ
which means that the observed realization of X
t
is
solely due to the introduced false positive rate τ. The
alternative, H
1
: p > τ, can therefore be interpreted
Distributed Anomaly Detection of Single Mote Attacks in RPL Networks
383
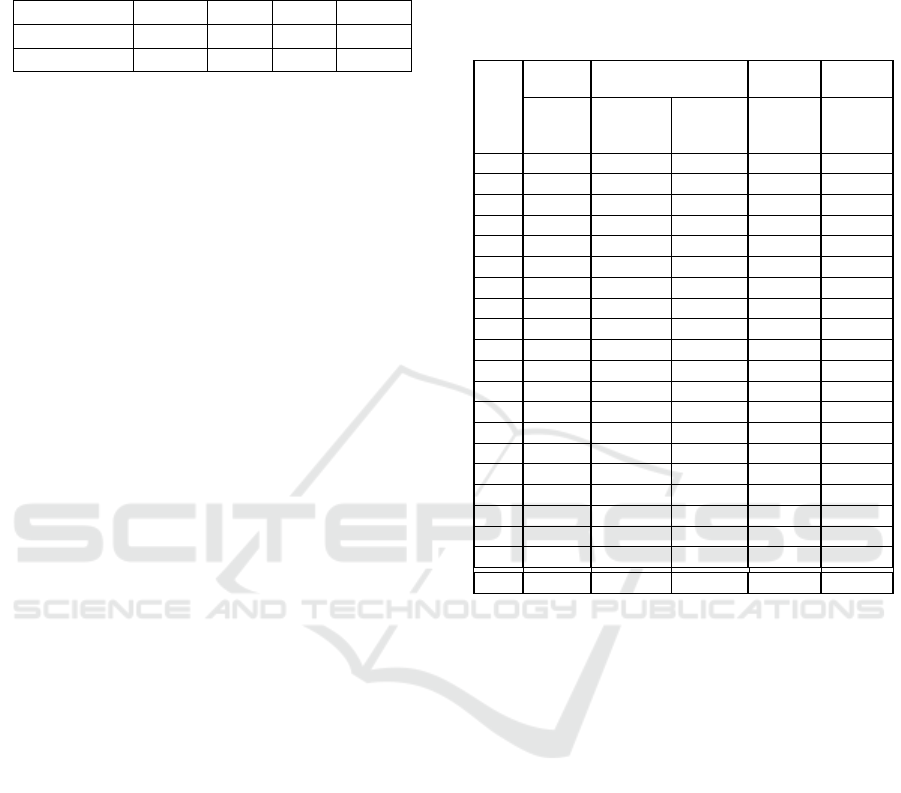
Table 3: Size of the motes with anomaly detection and with-
out anomaly detection. Column 2 shows the size of the text
segment, column 3 of the data segment, column 4 of the bss
segment, and column 5 shows the total size.
text data bss dec
without AD 47099 348 4652 52099
with AD 53405 2148 5370 60923
as the result of an attack. Assuming a significance
level of α, the threshold k can then be determined by
demanding that P(X
t
≥ k|p = τ) =
∑
n
j=k
B( j; n, p) =
∑
n
j=k
n
j
p
n− j
(1 − p)
j
≤ α. In our implementation we
choose the common value of 0.01 for both signifi-
cance levels τ and α resulting in a critical ANP num-
ber of k = 2. Of course it would be desirable to be
able to choose τ and α as low as possible, however,
as known from test theory, this comes at the cost of
higher false negative (Type II error) probability.
6.4 Results
When we implement and evaluate this pipeline as de-
scribed in Section 5.3, we obtain the following results.
On average, our system detects the Blackhole, Hello-
Flood and Version Number attacks with 68%, 90%
and 96% true positives respectively, and 0.5% false
positives. Table 4 details these results. Also note that
the detection on mote level is implemented in C, but
sending ANPs (and therefore, detection on root level)
is currently simulated in a python script.
In the Blackhole attack scenario, the degree to
which the attacker manages to establish themselves
as a parent of the surrounding nodes varies signifi-
cantly. This is due to the random layout of the topol-
ogy, where the malicious node may be placed un-
favourably for the attacker. We indicate this ’degree
of success’ of the black hole attack by the malicious
UDP flow ratio increase, which is the increase in UDP
packets received by the malicious node in comparison
to an ordinary mote. For example, in data set 20, the
malicious note receives less than 1% additional traf-
fic compared to an average mote, i.e. the black hole
attack can not be considered effective. Consequently,
there is a very low detection rate (less than 5%). In
contrast, the attack is very effective in data set 1 (ma-
licious UDP flow increased by 550%), which results
in a detection rate of 91%.
6.5 Security Considerations
In this Subsection, we briefly examine to which extent
the attacker can circumvent our anomaly detection if
he knows that it is employed in a given WSN. First,
we consider avoiding detection on the mote level. As
Table 4: Results of our anomaly detection system on all Test
Groups, where the system was trained on the non-malicious
data from all Test Groups. The tables details the false posi-
tive rate for the Clean Set, and the true positive rate for the
Blackhole, Hello Flood and Version Number attack. For the
black hole attack, ’UDP flow’ indicates the increase of UDP
packets to the attacker in comparison to an average node.
Clean Blackhole H.F. V.N.
FP TP
UDP
Flow
TP TP
1 0.0% 91.8% +554% 91.1% 95.0%
2 0.5% 87.4% +413% 91.9% 95.5%
3 0.0% 95.0% +542% 97.9% 96.6%
4 0.7% 90.3% +570% 96.4% 96.4%
5 0.0% 82.9% +370% 93.0% 96.2%
6 0.0% 85.4% +270% 91.9% 97.5%
7 0.0% 76.5% +204% 93.7% 95.8%
8 0.4% 12.6% +67% 94.6% 95.7%
9 0.0% 35.4% +167% 90.5% 97.5%
10 5.1% 77.8% +377% 87.9% 93.9%
11 0.0% 45.4% +319% 92.0% 96.2%
12 0.4% 83.5% +566% 83.8% 98.6%
13 0.0% 73.4% +496% 82.3% 94.3%
14 0.0% 89.9% +555% 82.3% 96.0%
15 0.0% 76.5% +485% 94.1% 97.9%
16 0.7% 57.2% +269% 89.6% 93.9%
17 1.9% 73.4% +470% 77.9% 96.8%
18 0.0% 75.3% +505% 88.4% 98.5%
19 0.0% 56.3% +368% 92.9% 97.1%
20 0.4% 4.7% +0.1% 91.4% 91.7%
All 0.5% 68.52% +379% 90.2% 96.1%
for the Hello Flood and Version Number attack, there
is no way to evade detection, because these attacks
work intrinsically by flooding the network, which
cannot be hidden from the anomaly detection what-
soever. Also, since the model comes pre-trained, the
possibility of a ’concept drift’ is ruled out, e.g. the at-
tacker slowly getting the network used to an increase
of traffic. As for the Black Hole attack, the attacker
can trade off effectiveness against stealthiness. This
is achieved by transitioning to a ’Grey Hole’ which
blocks some messages while forwarding others. Ob-
viously, this also decreases the impact of the attack.
There are scenarios in which the attack may modify
the traffic before forwarding, thus possibly avoiding
detection while also violating the network’s integrity.
This, however, is not detectable on ISO-OSI layer 3,
and requires layer 7 packet checking, which is out of
the scope of this work.
Second, we consider avoiding detection on the
root level, e.g. preventing or diminishing the impact
of ANPs sent by individual motes. Spoofing an in-
creased number of nodes does not reduce the detec-
tion chances, since it is only used in the hypothe-
SECRYPT 2019 - 16th International Conference on Security and Cryptography
384

sis test and there the number of nodes is defined by
the network administrator. Alternatively, the attacker
may try prevent ANPs reaching the node by means
of a black hole, simply dropping all incoming traf-
fic. Our system tries to mitigate this by broadcasting
ANP packets instead of sending them directly to the
root, thus potentially finding an alternate path of tran-
sit which does not comprise the malicious mote.
6.6 Model Overhead
Since WSN motes have limited memory, we evaluate
the memory overhead of our system in this Section.
We compare a Z1 mote with our anomaly detection
system against a Z1 mote without our anomaly detec-
tion system. For this, we use the unix size command.
The results are given in Table 3.
The results indicate that the addition of our system
increases the size of the executable by around 17%.
The text section increases by 13% and is the largest
absolute contributor to the size increase. data and bss
sections increase by less than 2000 bytes.
Since the mote’s computational power is also very
limited, we evaluate the additional time required for
the added functionality. The time is measured in clock
ticks given by Contiki’s RTIMER NOW function. In
the Zolertia Z1 motes, the corresponding clock has
2
15
ticks per second. For initialization of our algo-
rithm, a node requires on average 197.81 ticks. This
corresponds to 6.04 milliseconds. Frequently called
tasks take on average 208.23 ticks per second and,
thus, take less than 0.64% of the CPU time each sec-
ond. Additionally, we have to modify the packet pro-
cessing of the network stack leading to an increase of
the average time for processing a packet from 22.79
ticks to 25.77 ticks, which corresponds to an increase
of 13.04%.
7 CONCLUSION
In this paper, we present an anomaly detection sys-
tem which is designed to detect single mote attacks
on RPL based-networks on layer 3. This is impor-
tant with these kinds of attacks since they can only
be detected on the application layer after the dam-
age has already been dealt. We implement our system
in C, evaluate it against a set of different topologies,
and show that it can reliably detect three fundamen-
tal attack types while at the same time respecting the
motes’ energy and storage constraints.
REFERENCES
Alexander, R. (2012). RPL: IPv6 Routing Protocol for Low-
Power and Lossy Networks. RFC 6550.
Almomani, I., Kasasbeh, B. A., and Al-Akhras, M. (2016).
WSN-DS: A Dataset for Intrusion Detection Sys-
tems in Wireless Sensor Networks. J. Sensors,
2016:4731953:1–4731953:16.
Bhuse, V. and Gupta, A. (2006). Anomaly intrusion detec-
tion in wireless sensor networks. J. High Speed Netw.,
15(1):33–51.
Bosman, H. H. W. J. (2016). Anomaly detection in net-
worked embedded sensor systems. PhD thesis, Tech-
nische Universiteit Eindhoven.
D’Hondt, A. (2015). RPL attacks framework. Tech-
nical report, Universit catholique de Louvain.
https://github.com/dhondta/rpl-attacks/.
Dunkels, A., Gronvall, B., and Voigt, T. (2004). Contiki - a
lightweight and flexible operating system for tiny net-
worked sensors. In 29th Annual IEEE International
Conference on Local Computer Networks, pages 455–
462.
Hoang, H. T., Eui-Nam, H., and Minho, J. (2015). A
lightweight intrusion detection framework for wire-
less sensor networks. Wireless Communications and
Mobile Computing, 10(4):559–572.
Kaplantzis, S., Shilton, A., Mani, N., and Sekercioglu,
Y. A. (2007). Detecting selective forwarding attacks
in wireless sensor networks using support vector ma-
chines. In ICISSNIP 2007, pages 335–340.
Kumarage, H., Khalil, I., Tari, Z., and Zomaya, A. (2013).
Distributed anomaly detection for industrial wireless
sensor networks based on fuzzy data modelling. Jour-
nal of Parallel and Distributed Computing, 73(6):790
– 806.
Pongle, P. and Chavan, G. (2015). A survey: Attacks on
RPL and 6lowpan in IoT. In 2015 International Con-
ference on Pervasive Computing (ICPC). IEEE.
Rajasegarar, S., Leckie, C., Palaniswami, M., and Bezdek,
J. C. (2006). Distributed anomaly detection in wire-
less sensor networks. In 2006 10th IEEE Singapore
International Conference on Communication Systems.
Raza, S., Wallgren, L., and Voigt, T. (2013). SVELTE:
Real-time intrusion detection in the internet of things.
Ad Hoc Networks, 11(8):2661 – 2674.
Wallgren, L. (2013). Routing Attacks and Countermeasures
in the RPL-Based Internet of Things. International
Journal of Distributed Sensor Networks, 9(8):794326.
Distributed Anomaly Detection of Single Mote Attacks in RPL Networks
385
