
Towards an Advanced ROS Package Generator
Anthony Remazeilles and Jon Azpiazu
TECNALIA, Paseo Mikeletegi, Parque Tecnol
´
ogico, San Sebastian, Spain
Keywords:
Robotics, Software Engineering, Code Generation.
Abstract:
This paper describes a tool for generating ROS packages and nodes. Compared to the relatively basic tra-
ditional package creation method, this tool can generate a whole node structure, including its life-cycle and
the exposed interface to other ROS nodes. Following a separation of concerns, the developer only defines the
interaction means in a XML file, and the tool provides the whole skeleton of the nodes, including the interface
creation and management. This way, the developer can focus on his real added value, the implementation of
the node logic. Compared to advanced node management frameworks proposed in literature, the tool pro-
posed does not require the developer to understand and agree on complex high-level architecture models. The
developer only has to select a template model, and to provide the desired interface to get the code generated.
The package generation is made possible thanks to package templates, and we provide with the generator tool
two templates for creating nodes either in C++ or Python. The user has also the possibility to design his own
template, so that he can develop the one that best fits his needs and best practices. The package generator code
is accessible on public repository hosting facilities.
1 INTRODUCTION
The Robot Operating System (ROS) (Quigley et al.,
2009) has become the standard framework for devel-
oping robotic solutions. Its popularity in the research
community does not need to be demonstrated any-
more and initiatives like ROS-Industrial promote its
use in the context of industrial applications.
Surprisingly, in comparison to the outstanding
number of applications developed with ROS, there is
very little material for creating the basic component
of a ROS development, named ROS package. A ROS
package is usually created using terminal commands
such as catkin create pkg which enables introducing
meta information about the package to generate (list
of dependencies, author email, etc). Once executed, a
folder is created containing the files package.xml and
CMakelists.txt that are partially filled out according to
the command arguments. These two files are the ba-
sics that define a ROS package. Then, the compo-
nent creation is left entirely to the developer. On one
hand, this is positive since the developer has a com-
plete freedom for the implementation. On the other
hand, we can highlight the following drawbacks:
Loss of Time: Every time a new package or node
is created, the developer has to do it from scratch.
Clever copy and paste may be used to get inspira-
tion from previously designed nodes but this is usu-
ally error-prone. The developer is very likely to loose
time in re-implementing the basic layers of the node.
Implementation Quality: There is a lot of docu-
mentation proposing good practices on packages and
nodes structure. Nevertheless, their use depends on
the developer, according to his programming knowl-
edge and expertise, his time constraint or motivation.
Thus, for any of these reasons, it is probable that a
developer may take some inappropriate implemen-
tation decisions. Also, a developer team may have
some preferred implementation schemes (documen-
tation style, header contents, communication models,
...). But there is no simple solution to generate pack-
ages or node skeletons from these guidelines.
Node Life-cycle Hidden in Source Code: The life-
cycle of a node refers to its different stages of execu-
tion (a more detailed description is given later). This
information is crucial to understand how to use the
node and interact with it, and should be detailed in
the documentation. It is thus up to the developer to
provide a good and updated description. Otherwise, it
may be needed to dig into the code to figure out how
the node behaves, which can be very time-consuming.
Node Interface Hidden in Source Code: The node
interface (communication mechanisms exposed to
other ROS nodes) is usually described in the node’s
Remazeilles, A. and Azpiazu, J.
Towards an Advanced ROS Package Generator.
DOI: 10.5220/0007834002430250
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 243-250
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
243

documentation. If it is not documented, an alternative
is to run the node, and use ROS introspection tools to
figure it out. Nevertheless, it may not be evident to
infer the complete interface this way.
Code Evolution and Reuse Potentially Complex:
The two previous points highlighted the potential dif-
ficulties for users to understand how to use an existing
node. The evolution of the code (by other developer,
but even by the author) may also be complex if the
current implementation is not well described and if it
does not follow best practices. Even little extensions
of the functionality or interface may lead to signifi-
cant development time for (i) understanding the code,
and (ii) reshaping the structure to follow better imple-
mentation strategies.
Based on this analysis, we propose a novel ROS
package generator to speed up and ease ROS develop-
ment
1
The package generator relies on package tem-
plates, but any advanced developer can implement
his own one, based on his needs and programming
policies. For the user, the package generation only
requires the selection of the template, and a speci-
fication file describing the interface of the package.
The package generator then automatically provides a
whole package by adjusting the template according to
the specifications. The component skeleton obtained
enables the developer to focus on his real contribu-
tion, that is the node logic implementation. The tool
is also provided with update mechanisms enabling the
developer to update the interface of the package gen-
erated without loosing the code already inserted.
Next Section presents the literature related to ROS
packages and nodes creation. Section 3 describes the
component we have developed, and in Section 4 we
show how it can be used with the templates provided,
and how new templates can be created. Conclusions
and future work are mentioned in the last Section.
2 STATE OF THE ART
Several high-level tools exist for automating the cre-
ation of ROS nodes and packages. They reduce the
cost of code production by using hidden code tem-
plates or skeletons. If the proposed template fits his
needs, the developer can focus on the logic implemen-
tation and let the automation tool prepare the rest of
the architecture.
ROSLab is a high-level programming language
(Bezzo et al., 2014) that is an extra layer added on the
top of ROS to simplify the lower level code genera-
tion. In a Java-based graphical interface it enables to
1
See Repository https://github.com/tecnalia-advanced
manufacturing-robotics/ros pkg genros pkg gen in github
connect nodes through their communication interface
to create a complete application. The underlying code
generation uses ROSGen component implemented in
Coq (Meng et al., 2015). Unfortunately, that solution
has not been maintained since 2017.
ROSMOD (Robot Operating System Model-
driven development tool suite) also provides graphi-
cal tools for rapid prototyping and deploying large-
scale applications (Kumar et al., 2016). It follows
a component-based approach structure, and is said
to be a refinement of the ROS component model.
ROSMOD intends to reduce the amount of time and
effort developers spend installing, configuring, and
maintaining applications. Nevertheless, it requires
agreeing with the proposed component model, that is
slightly different from the traditional ROS one, which
may be acknowledged only by advanced developers.
BRIDE (BRICS Integrated Development Environ-
ment) is one the main outcomes of the European
project BRICS (Bischoff et al., 2010; Bubeck et al.,
2014). Following a Model Driven Engineering ap-
proach, it provides an abstract representation of com-
ponent interfaces and behaviors, as well as an auto-
matic model validation and code generation (in ROS
or Orocos). BRIDE is integrated as an Eclipse plu-
gin, so that the developer can graphically design
nodes and their communication interface. The devel-
opment is following the spirit of Component-Based
Software Engineering, targeting quality, technical and
functional reusability (Brugali and Shakhimardanov,
2010). Considering that a software component is de-
fined to be a unit of composition with contractually
specified interfaces and explicit context dependencies
only, BRICS stresses the clear distinction in between
the interface (framework specific) and the implemen-
tation of the component functionalities (framework
independent). From the definition of a component in-
terface, BRICS prepares the ROS node structure and
the communication tools, and places in a separate file
the skeleton of the code to be filled by the user. The
concepts followed by BRICS are of major importance
for developing stable components with clear inter-
faces. Unfortunately, the developments have stopped
since 2017 and at the ROS Indigo release. Further-
more, changing the life-cycle or the generic structure
of the ROS component pattern requires strong exper-
tise in Java programming and Eclipse plugin develop-
ment.
So far, it is not evident whether any of these solu-
tions has been broadly accepted and / or used. We see
two limitations that could explain such lack of com-
munity acceptance. First of all, these tools rely on
meta models of software architecture placed on the
top of ROS ecosystem. Even if their technical sound-
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
244

ness and quality may be relevant, they nevertheless
require a (too) significant effort from the developers
to learn, and thus to be willing to use these solutions.
Our package generator only requires selecting a tem-
plate based on ROS concepts (like the life-cycle) and
filling a XML file defining the desired interface. Sec-
ondly, the maintenance of some of these software un-
fortunately stopped with the closure of the projects
they came from. To maintain these developments, a
significant effort to understand the framework imple-
mentation is required since the component patterns
are usually defined implicitly in the source code.
The package templates used by our generator are
not embedded in the generator code, and new tem-
plates can be created following instructions similar
to templating languages, easing the adaptation of the
patterns to developer needs. Also the package gen-
erator is implemented in Python, which is a common
programming language within the ROS community.
As already stated, it is very important to define
explicitly the interface of a node. But it is also cru-
cial making clear what is its life-cycle. Even though
part of it may be inferred from the interface defini-
tion, critical aspects may not be easily inferred , such
as when the node computation starts, can (should) we
stop and resume the node activity during the appli-
cation, and so on. A particular care is taken with
such matters in ROS2, through the concept of man-
aged nodes (ROS, 2018). Managed nodes implement
a state machine indicating whether the node is uncon-
figured (just instantiated), inactive (configured but not
running), active (performing its computation) or final-
ized (before destruction). The definition of a managed
node requires implementing the different transitions
from one state to another. By structuring the node’s
life-cycle, the use of managed nodes is less depen-
dent on the developer’s implementation choices. This
should definitely ease monitoring applications and the
reuse of components. Nevertheless, the duty of creat-
ing nodes and defining the communication interface
remains on the user’s side, so that a package genera-
tor tool would still be of interest.
3 THE PACKAGE GENERATOR
Our package generator leads to the following work-
flow (from the source folder of a ROS workspace):
# d e f i n i t i o n o f t h e p a ck a ge s p e c i n a f i l e
$ g e d i t m y g r eatp a c k age . r o s p a c k a g e
$ r o s r u n p a c k a g e g e n e r a t o r g e n e r a t e p a c k a g e \
m ygre a t p acka g e . r o s p a c k a g e python m o d e l u p d a t e
mygreatpackage.ros package is a XML description
of the package specification, including all nodes to
be created and their desired respective interfaces
(an example of such file is provided on Fig. 1).
python model update is the name of the template to
be used to generate the new package.
Once executed, a complete skeleton of the pack-
age and included nodes is generated automatically,
including the definition and implementation of the in-
terface as well as the nodes’ life cycle, according to
the package model selected. The package documenta-
tion with all nodes specification (interface, node life-
cycle) is also automatically generated. The developer
just has to write the node intelligence, in well des-
ignated specific regions. If he decides to change the
interface (for example adding a topic subscription),
the XML description file is updated and the previ-
ous command relaunched. The user contribution in
the tagged areas is kept, as well as additional files not
present in the template if the developer explicitly re-
quires it. The Developer still can change the imple-
mentation anywhere, diverging from the original node
pattern. In such case, the update functionality could
not be used anymore.
Next Section provides some terminology and Sec-
tion 3.2 gathers the requirements that guided the tool
design. Then Section 3.3 details the needed informa-
tion to launch the package generation, while Section
3.4 describes the package generator implementation.
3.1 Package Generation Terminology
We start with the definition of different concepts we
will frequently use.
Template Package: set of files, in any of the ROS
known languages, constituting a package skeleton
(like python model update in the previous example).
Each file of the template is composed of (i) code to be
reproduced as is in the generated file, (ii) tags to be
interpreted by the code generator and (iii) specific ar-
eas indicating where the Developer should insert the
node’s intelligence.
Template Designer: person developing a template
package. He is in charge of deciding how the XML
specification file is affecting the code skeleton, and
where the Developer should provide the node logic.
The Template Designer provides the whole package
and node pattern, from the node interface to its life-
cycle, and can also automate the generation of the
documentation. He can also restrict the possible inter-
face (by implementing only a subset of the ROS com-
munication tools). It requires a deeper understanding
of the package generator mechanism.
Package Developer: person who wants to create a
new ROS package. His responsibility is (i) to select
the suitable template, (ii) to define the package spec-
ification accordingly to the template documentation,
Towards an Advanced ROS Package Generator
245

Figure 1: XML Package specification file example.
and, once the package is created, (iii), to add the node
logic to the generated code.
Node Logic: code added by the Developer to the gen-
erated package. If we assume that the package tem-
plate takes care of the node interface and its life-cycle,
the node logic should only consider the implementa-
tion of the node computation.
Node Interface: list of communication means a node
is proposing to the rest of the ROS nodes. It is based
on all standard ROS tools, i.e. topics, services, ac-
tions, parameter and dynamic parameters, tf. Ideally,
the template should be designed to make a clear sep-
aration between the interface management (like sub-
scriber creation and callback), and the exchanged in-
formation use or generation (like processing a mes-
sage received to produce a message to send). Also the
template should handle the interface description in the
documentation file (Readme.md file).
Node Life-cycle: behavior of the node from its cre-
ation to its termination. Every ROS node has a life-
cycle, although it may not be clearly described (and
implemented). The Template Designer is ideally re-
sponsible for defining the node life-cycle, through the
proposed template. He should therefore mention it
in the template description, and handle it in the node
skeleton. This way, a Developer knows by selecting a
template how the life-cycle will be, and, once a pack-
age is generated and filled by the Developer, a user of
the package will have a clear description of the com-
ponent’s behavior.
It is clear that a strong responsibility is placed on
the Designer’s shoulders. Indeed, the quality of the
template, the node life-cycle and interface implemen-
tation and description strongly rely on him.
3.2 Package Generator Objectives
The package generator has been implemented for ad-
dressing the following objectives:
Automatic Code Generation, including node life-
cycle pattern and node interface: after the package
generation, the Developer focuses on the node logic.
Node Creation based on the Interface: the Devel-
oper should only define the expected input and output
information to create a node. In the templates pro-
vided, the XML configuration mainly focuses on the
interface. Code related to the interface creation and
management is then automatically created.
Separation of Concerns: this is related to a clear dis-
tinction of the interface definition and management
and its implementation. This separation is totally de-
pendent on the templates, not on the code generation.
The templates proposed follow this leitmotiv, by ex-
plicitly using different files for the two aspects.
Adjustability/customizability: the template model
is not hard-coded in the package generator, and new
ones can be added. We provide right now two tem-
plates, one for C++ nodes and another for Python
nodes. A Template Designer could use these models
as example to produce templates more suitable to his
need. Template creation enables teams to agree and
follow common patterns. Also, by using code gen-
eration tools instead of inheritance mechanisms, the
Developer has access to all the code in his package,
and can, if he sees the needs, change any part of the
generated code.
Keep It Simple: the use of the package generator is
made simple to ease its adoption by the community.
3.3 User Input Information
The generation of a package requires two informa-
tion: (i) a specification file and (ii) the name of the
selected template. The specification file is a XML
file which structure is strongly inspired by the BRIDE
model. An example of specification file is presented
in figure 1. The package attributes, including its
name, are meta-data associated to the package, used
to fill the package.xml file and the documentation.
The package tag contains a node tag per node to be
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
246
generated (so far all nodes follow the same pattern).
The attributes of a node provide specifications for it.
In the current templates, the Developer can specify
the node name and the update frequency.
Inside the node tag is then described the node’s
interface. In the provided templates, the Developer
has access to all standard ROS communication means,
i.e publishers, subscribers, parameters and dynamic
parameters, service clients and servers, action clients
and servers, tf listeners and broadcasters.
Most of the interface components are described
by the same attributes, i.e. name, type and descrip-
tion. The first two attributes are required for the auto-
matic generation of the interface code, while the latter
is needed for the documentation generation.
Finally, a set of dependencies are provided. Cur-
rent templates automatically add these packages to the
files CMakeLists.txt and package.xml. When the XML
file is loaded, we also check the packages used by the
interface, so that additional dependencies may be au-
tomatically added accordingly.
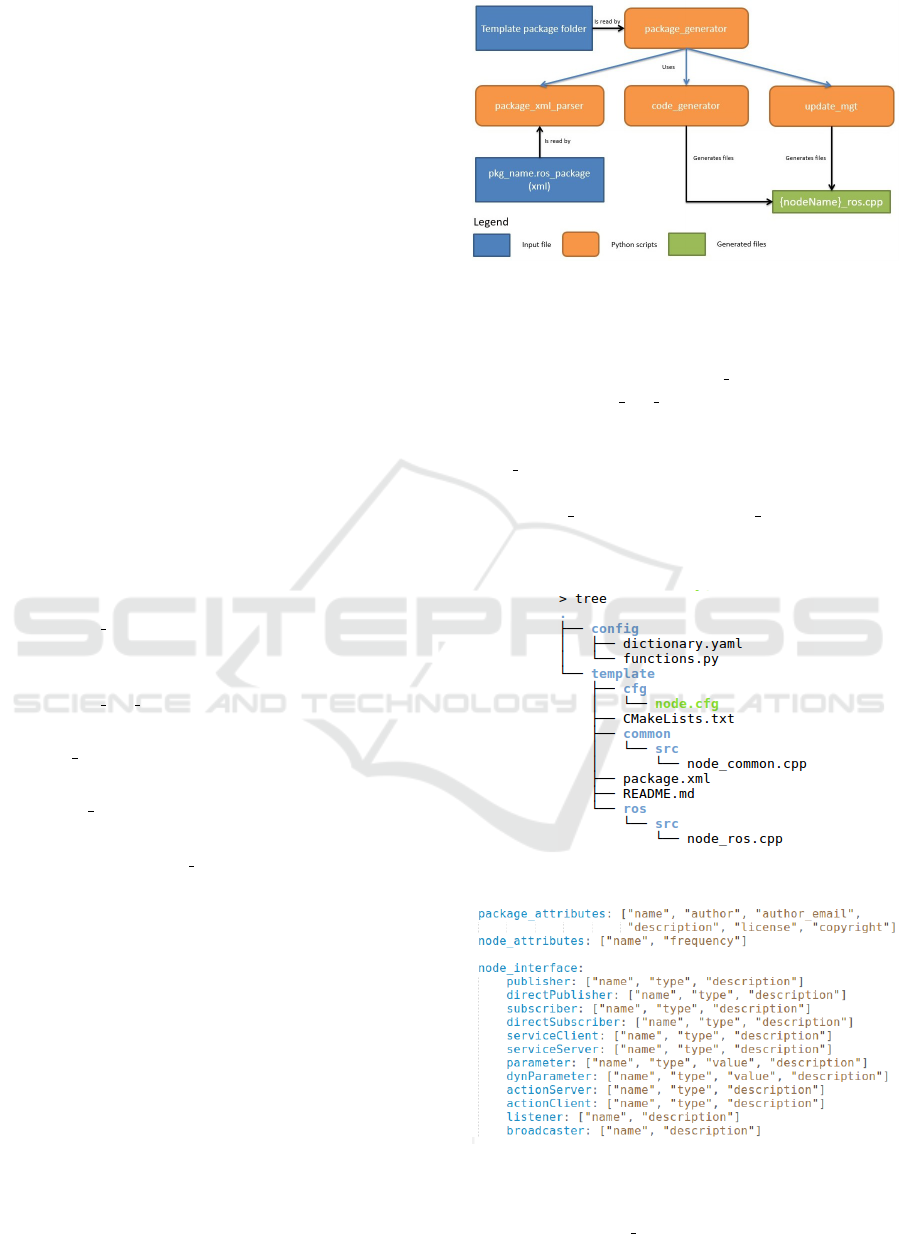
3.4 Package Generator Details
The package generator, implemented in Python, is
composed of the following files (see Fig. 2):
• package generator.py: orchestrates the whole
package generation, given a template directory,
and a XML package description.
• package xml parser.py: is responsible for parsing
the XML package description.
• code generator.py: generates a file from a XML
node description and a file template.
• update mgt.py: provides the update functionality
for packages already created.
The script package generator.py orchestrates the
whole package generation, following the package
template. A package template is a regular directory
which typical contents are presented on figure 3. It
must contain two folders: config and template. The
first one provides configuration information, while the
second gathers the skeleton of all files to be generated.
In the configuration folder, the file dictionary.yaml
defines the tags a Developer can use in his XML con-
figuration file. The Designer defines here each possi-
ble interface, with the related attributes. In the exam-
ple in figure 4, the provided interfaces are very sim-
ilar to the standard ROS ones, but the Designer can
also add new concepts, or even reduce the number of
interfaces allowed if appropriate. Note that, on the
Developer side, a tool is provided to generate a XML
specification skeleton with all the accepted interfaces
by the template. Finally, the file functions.py enables
Figure 2: Main components of the package generator.
the Designer to add simple functions that can be used
during the code generation (mentioned later on).
The global script package generator.py invokes
the script package xml parser to load and pre-process
the package description, and then handles the gen-
eration of all template files by calling the script
code generator.py. If the XML configuration file con-
tains several nodes, files containing node in their
name (node common.cpp and node ros.cpp in the ex-
ample on Figure 3) are generated for each node spec-
ified, while the other files are only generated once.
Figure 3: Typical contents of a package template.
Figure 4: Specification of the dictionary handled by a given
package template (file dictionary.yaml).
The script code generator.py requires a template
file, the specifications of the global package as well
Towards an Advanced ROS Package Generator
247

as the specifications of one node. The template file is
scanned, looking for specific markers. Currently, for
simplicity, the markers are all of format {instruction}.
The instructions are purely related to the different tags
the Developer can introduce in his XML file. More
exactly, for all interface types, the Designer is pro-
vided with the generator instructions {ifinterface} and
{forallinterface}. As an example, let us assume that a
template file contains the following code:
{ i f p u b l i s h e r }
/ / d e f i n i n g a l l p u b l i s h e r s
{ e n d i f p u b l i s h e r }
{ f o r a l l p u b l i s h e r }
r o s : : P u b l i s h e r {name} = n . a d v e r t i s e <{t ype }>(” { name } ” , 1 ) ;
{ e n d f o r a l l p u b l i s h e r }
The comment line will only be generated if at least
one publisher is defined. The publisher definition will
be repeated for all the publishers defined, using the
values of the attributes name and type found in the
XML description of this node.
The script code generator.py also handles instruc-
tions of type {apply-func}. It will apply the function
func with the interface attributes as input parameters.
For example, the type of an interface is provided in the
XML file with the format PackageName::Type, i.e as
we would use it in regular C++ code. Dedicated func-
tions are introduced for mapping this type to Python
formats, for extracting the package, the type, etc. All
these functions are defined in the configuration file
functions.py provided with the package template.
If the Developer executes again the package gen-
eration after its creation, the package
generator de-
tects the presence of the package already created, and
assumes that an update of that package is requested.
A copy of the current package is placed in a temporal
folder, and all files are then generated, and compared
to their previous version. More exactly, the script up-
date mgt.py focuses on the areas delimited as follows:
# p r o t e c t e d reg i o n u s e r u p date b e g i n #
r o s py . l o g i n f o ( ” U pdat e Re c e i v e d v a l u e : {} ” . f o r m a t ( d a t a .
i n c o u n t e r ) )
# p r o t e c t e d re g i o n us e r u p d a t e en d #
All Developer’s code inserted between these tags is
indexed and reinserted in the new code generated.
That way the code already inserted by the Developer
is maintained upon update.
4 USE AND LESSONS LEARNED
As an illustration of use of the package generator, we
have implemented two package templates. Both pro-
vide a standard node template with a clear life-cycle
that can already handle a large variety of develop-
ments. They can also help Template Designers im-
plementing their own models.
Next Section describes their implementation,
while Section 4.2 provides insight on the lessons
learned during the template design and use for real
packages. Finally we will compare the tool outcomes
to the objectives initially defined in Section 3.2.
4.1 Templates Provided
The two templates provided are similar in term of be-
havior. They enable generating packages with nodes
respectively in C++ and Python. We focus on the C++
version, as most of the description holds for both.
Following the separation of concerns strategy, we
distinguish the node communication and coordination
from the computational part. The Developer’s contri-
bution is only expected in the latter, all other aspects
are automatically generated. In terms of life-cycle
pattern, the proposed scheme is a periodical update, in
which at each iteration of the main loop, the computa-
tional layer gets the latest messages received (through
message subscription) to generate the related output
to be transmitted (through message publication).
The separation of concerns is materialized by the
presence of two files per node:
• ros/src/[node name] ros.cpp ROS interface and
life-cycle implementation. It defines the class
Ros[NodeName].
• common/src/[node name] common.cpp will con-
tain the node logic provided by the Developer,
mainly by filling a class named [NodeName]Impl.
The class Ros[NodeName] defines the ROS com-
munication interface. It contains also attributes re-
lated to classes defined in [node name] common.cpp:
• [NodeName]Config: contains the (dynamically
adjusted or not) parameters.
• [NodeName]Data: constains the input messages
received and the output messages to be sent.
• [NodeName]Impl: will contain the Developer im-
plementation of the node.
File [node name] ros.cpp contains the main func-
tion. After creating an instance of Ros[NodeName]
and a configuration step an infinite loop is started.
All messages received are stored in an object of type
[NodeName]Data. At each iteration, the method up-
date of the class NodeNameImpl is called:
v o i d Nod eImp l : : u p d a t e ( [ NodeName ] D a t a &d a t a , [ NodeName ]
Co n f i g c o n f i g )
The parameter data contains the latest messages re-
ceived through subscription. Based on this input, the
method update implemented by the Developer can
prepare messages to be sent and store them in specific
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
248

attributes of the variable data. The publication is han-
dled by the instance of the class Ros[NodeName] at
the return of this update method. The parameter con-
fig contains all the application parameters (from the
parameter server, or handled through dynamic recon-
figure). This way, in a classical publisher / subscriber
scheme, this update function provides to the Devel-
oper all needed input to prepare the output.
The Developer’s contributions are only expected
within the file [node name] common.cpp, in locations
specified with the user contribution tag. The Devel-
oper may still update the code elsewhere but the up-
date mechanism will not keep these changes then.
In the file [node name] common.cpp, the class
[NodeName]Passthrough gathers components vio-
lating the interface / implementation separation
paradigm. We define in it all interface components
that may be directly accessed from the Developer’s
side. Furthermore, in the [NodeName]Data class, all
input messages are associated with a boolean flag in-
dicating whether the data has been updated since last
update call. The Developer can use such information
for the preparation of the output material. Similarly,
a boolean flag is associated to all output messages, so
that the Developer can inform whether it is necessary
to publish any data after the update completion.
An extensive documentation file template is pro-
vided, to get a complete description of all the commu-
nication means provided by each node. It is automat-
ically generated from the XML description file, and
specific user contribution areas are prepared to enable
the Developer extending the information.
Finally the ROS files related to the build opera-
tion, package.xml and CMakelists.txt, are also con-
templated in the package template, and automatically
filled from the XML description. A package freshly
created is thus already ready to be built, without mod-
ifying any of the generated files.
4.2 Lessons Learned
We are using the package generator in several running
projects. In Python for example the code generated
can represent around 80% of the total node code, and
a quite complete interface description is directly ex-
tracted from the XML specification.
The proposed templates are usually sufficient to
handle most of the packages needs, but we also gen-
erated more dedicated templates to better represent
some specific models, such as pure service or action
nodes, pure messages and services definition pack-
ages, filter nodes, ... We usually start with the default
template and then decide whether the adaptations we
feel necessary should be added to the default model
or are worth the creation of a new template.
The update mechanism has also shown to be ef-
ficient for updating already created packages after an
adjustment of the template itself. This occurred for in-
stance when we inserted the flags for signalizing the
update of input messages or for signaling if output
messages should be published. All packages created
before could be directly upgraded with such function-
ality by re-executing the package generator.
The capability of defining ad-hoc interface at-
tributes has also enabled to characterize and formal-
ize different communication models. For instance, in
several projects we have seen that waiting the update
period for processing or publishing messages may be
restrictive. We have thus decided to implement a ded-
icated interface, named directPublisher and directSub-
scriber. These message communication managers are
regular ROS publishers and providers that are han-
dled out of the update mechanism (within class [Node-
Name]Passthrough), for specific interactions that can-
not wait for an update cycle.
Finally we observed that when using such tem-
plate mechanism, the Developer has to think of the
component he wants to create before starting imple-
menting it. Which template and related life-cycle best
fits to a given task? What is the targeted interface?
These questions have to be addressed yet from the
beginning, and the update mechanism always gives
a chance to adjust the decision initially taken.
4.3 Completion of Initial Objectives
We highlighted in Section 3.2 five objectives. The au-
tomatic code generation is definitely achieved. Once
the package generation is launched, the Developer
only has then to insert the node logic. All the ROS
connectivity is automatically generated. There is a
significant improvement with respect to the standard
catkin create package command.
The generation of the node life cycle, the node
interface, as well as the node creation based on the
interface is effectively happening with the package
templates we provide. We also explicitly separate the
ROS interface and node cycle from the node intelli-
gence by placing them within different files.
Nevertheless, the completion of these objectives
totally relies on the template provided by the De-
signer. On one hand we can argue that the Designer
may then define a template that violates these objec-
tives. On the other hand, this gives total freedom to
the Designer for defining the template that matches
exactly the need of his team.
The possibility of defining new templates is also
demonstrated as we already propose two differ-
Towards an Advanced ROS Package Generator
249

ent templates for two different languages, C++ and
Python. The Designer can define not only his own
template, but also the interface itself, with the related
tags and attributes the Developer should use in the
XML file.
With respect to the last objective, keep it simple, it
is achieved on the Developer side considering the lim-
ited information requested to trigger the code genera-
tion: the appropriate template, and the targeted node
interface. The Template Designer may have a more
complex job, for defining the appropriate template.
Nevertheless this has to be counterbalanced with the
saved time by reducing the effort needed for code
maintenance, refactoring etc., that is likely to happen
otherwise, even if the team has a code policy.
To finish, we consider the possibility to change
the generated code as a positive point. The generated
code is not using advanced meta model that may be
complex for the Developer to tweak if the situation
requires it. Our generated code can still be changed
by the Developer, even though this is not preferable.
5 CONCLUSIONS
We described a ROS package generator that generates
complete package and node code based on a given
template and a simple XML description of the desired
interface. This tool is not restricted to a unique pack-
age template, and Designers have the possibility to
implement new templates. The template creation is
relatively simple, and uses instructions automatically
adjusted to the template characteristics. Also we pro-
vide an update mechanism so that a Developer can
adjust or extend the proposed interface, without loos-
ing the node logic previously introduced.
Several extensions are envisioned to enhance the
capabilities of the package generator. One of them is
to enable the generation of other ROS components.
Currently only ROS nodes are created, which is en-
forced by the use of the special tag node in the XML
dictionary. By enabling other types of tags, we be-
lieve the code generator could easily be extended to
other structures, such as ROS controllers.
The code generator started with a simple but effi-
cient in-house templating language derived from the
interface parameters. We are strongly considering
more mature code generator tools, such as Jinja, that
would give access to more complex code generation
scheme in the package templates.
We are also considering migrating the generation
layer, currently at the level of the package, to a lower
layer, at node level, or more generally speaking at
component level. That would enable mixing different
templates in a given ROS package, like for example a
ROS node in C++, another one in Python . . .
It would be interesting porting the package gen-
erator to ROS2. The package code is almost pure
Python, using quite limited ROS functionality. Such
migration should be quite straightforward.
Finally, it would be an added value to provide re-
lated plugins for some code editors. This would help
the writing of the package configuration file, provid-
ing appropriate text completion to the Developer.
ACKNOWLEDGEMENTS
Supported by the Elkartek MALGUROB and the
ROSIN project under the European Union’s Horizon
2020 research & innovation programme, grant agree-
ment No. 732287. The authors would like to thank
Dr. Andrzej Wasowski for the helpful suggestions re-
garding the structure and contents of this article.
REFERENCES
Bezzo, N., Park, J., King, A., Gebhard, P., Ivanov, R., and
Lee, I. (2014). Demo abstract: ROSLab — A modular
programming environment for robotic applications. In
ACM/IEEE ICCPS, pages 214–214, Berlin, Germany.
Bischoff, R., Guhl, T., Prassler, E., Nowak, W., Kraet-
zschmar, G., Bruyninckx, H., Soetens, P., Haegele,
M., Pott, A., Breedveld, P., Broenink, J., Brugali, D.,
and Tomatis, N. (2010). BRICS - Best practice in
robotics. In ISR / ROBOTIK, pages 1–8.
Brugali, D. and Shakhimardanov, A. (2010). Component-
Based Robotic Engineering (Part II). IEEE Robotics
Automation Magazine, 17(1):100–112.
Bubeck, A., Weisshardt, F., and Verl, A. (2014). BRIDE - A
toolchain for framework-independent development of
industrial service robot applications. In ISR/Robotik,
pages 1–6, Munich, Germany.
Kumar, P. S., Emfinger, W., Karsai, G., Watkins, D., Gasser,
B., and Anilkumar, A. (2016). ROSMOD: A Toolsuite
for Modeling, Generating, Deploying, and Managing
Distributed Real-time Component-based Software us-
ing ROS. Electronics, 5(3).
Meng, W., Park, J., Sokolsky, O., Weirich, S., and Lee, I.
(2015). Verified ROS-Based Deployment of Platform-
Independent Control Systems. In NASA Formal Meth-
ods, volume 9058, pages 248–262.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng, A. (2009). ROS: an
open-source Robot Operating System. In ICRA Work-
shop on Open Source Software.
ROS (2018). ROS2 overview - Managed Nodes. https://
index.ros.org/doc/ros2/Managed-Nodes/. Ac-
cessed: 2018-11-22.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
250
