Enhancing Neural Network Prediction against Unknown Disturbances
with Neural Network Disturbance Observer
Maxime Pouilly-Cathelain
1,2
, Philippe Feyel
1
, Gilles Duc
2
and Guillaume Sandou
2
1
Safran Electronics & Defense, Massy, France
2
L2S, CentraleSup
´
elec, CNRS, Universit
´
e Paris-Sud, Universit
´
e Paris-Saclay, Gif-sur-Yvette, France
Keywords:
Neural Network, Prediction, Disturbance Observer.
Abstract:
Neural network prediction is a very challenging subject in the presence of disturbances. The difficulty comes
from the lack of knowledge about perturbation. Most papers related to prediction often omit disturbances but,
in a natural environment, a system is often subject to disturbances which could be external perturbations or also
small internal parameters variations caused, for instance, by the ageing of the system. The aim of this paper
is to realize a neural network predictor of a nonlinear system; for the predictor to be effective in the presence
of varying perturbations, we provide a neural network observer in order to reconstruct the disturbance and
compensate it, without any a priori knowledge. Once the disturbance is compensated, it is easier to realize
such a global neural network predictor. To reach this goal we model the system with a State-Space Neural
Network and use this model, completed with a disturbance model, in an Extended Kalman Filter.
1 INTRODUCTION
Most of controlled processes are very sensitive to dis-
turbances that may be of different natures; on the one
hand, they can model real external disturbances or,
on the other hand, internal parameter variations of
the system provided that they are small enough (Chen
et al., 2000). In this paper, we aim to model nonlin-
ear systems by using neural networks in order to get
a predictor. For instance, this predictor can be used
in a Model Predictive Control (Yu and Gomm, 2003),
being in that case initialized by the measure at each
time step following the so-called receding horizon
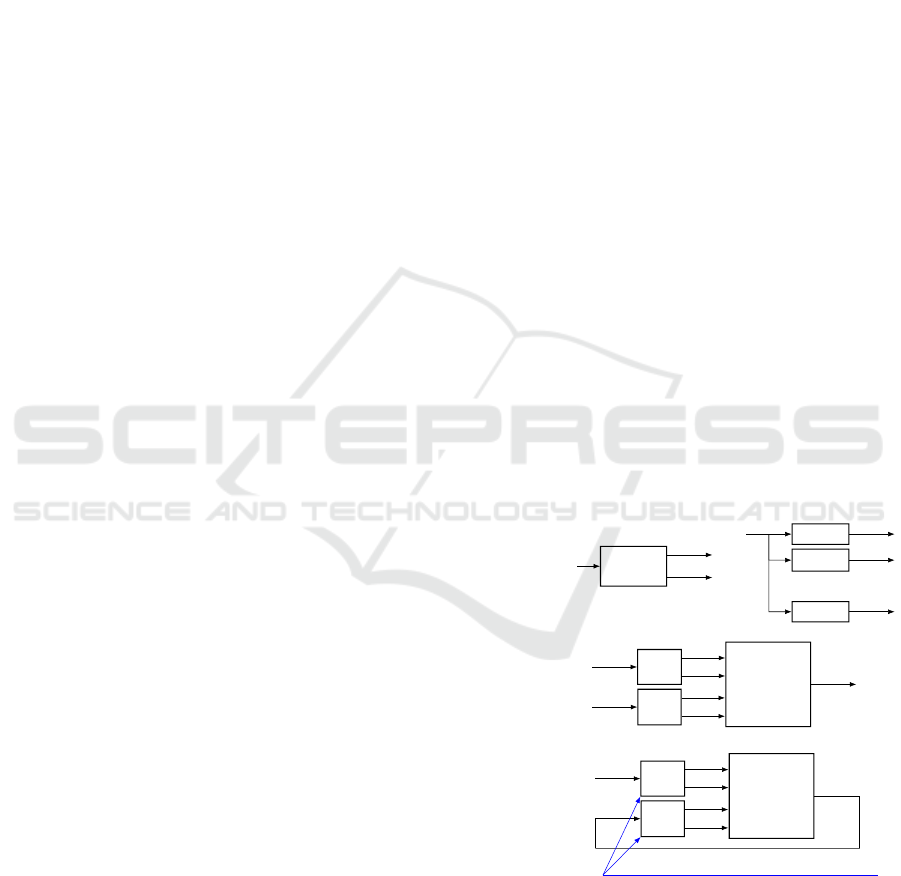
principle (Keviczky and Balas, 2006). Usually, for
the training task, the neural network used for predic-
tion purpose is a Feedforward Neural Network (FNN)
preceded by tapped delay lines (TDL, defined in fig-
ure 1). For the prediction task, the neural network is
then artificially looped into a Nonlinear AutoRegres-
sive eXogeneous model (NARX). This method, sum-
marized in figure 1, is similar to the one presented
in (Hagan et al., 1996) (Chapter 27) and has proved
its efficiency for different kinds of systems (Hed-
jar, 2013), (Diaconescu, 2008). This neural network
structure is preferred because it is easy to be trained
offline and online contrary to recursive structures as
shown in (Pascanu et al., 2013). Moreover, training
this structure online allows to learn small parameters
variations that can be modeled by small disturbances,
however we aim to deal with relatively high distur-
bances in this paper.
Tapped Delay
Line (TDL)
definition
TDL
(n
1
: n
2
)
(=)
z
−n
1
z
−(n
1
+1)
.
.
.
.
.
.
z
−n
2
x
y
n
1
.
.
.
y
n
2
x
y
n
1
y
n
1
+1
y
n
2
Learning task
(FNN)
TDL
(0 : n
u
)
TDL
(1 : n
y
)
NN
u
y
mes
.
.
.
.
.
.
y
NN
Prediction task
(NARX)
TDL
(0 : n
u
)
TDL
(1 : n
y
)
NN
u
.
.
.
.
.
.
y
NN
Initialized by previous measures at each time step
Figure 1: Neural network prediction using FNN/NARX
models.
However, using such a method leads to inaccurate
prediction results in the face of varying disturbance
profiles or parameter variations. Indeed, the neural
network is trained using some non-disturbed data or
some particular disturbance inputs. As a result, the
210
Pouilly-Cathelain, M., Feyel, P., Duc, G. and Sandou, G.
Enhancing Neural Network Prediction against Unknown Disturbances with Neural Network Disturbance Observer.
DOI: 10.5220/0007831102100219
In Proceedings of the 16th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2019), pages 210-219
ISBN: 978-989-758-380-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
prediction remains well adapted to these particular sit-
uations, but some large prediction errors may arise in
other real-life situations characterized by other real-
istic disturbance profiles or system parameter varia-
tions. This statement will be shown with the example
at the end of the paper.
With the aim of improving the performance of the
predictor against unknown disturbances that can vary
or vanish, a natural idea is to estimate the current
disturbance. The observed perturbation will then be
used as a feedback compensator to make the system
less sensitive to disturbances. Some solutions have al-
ready been proposed in the literature. (Vatankhah and
Farrokhi, 2017) presents an observer based on a neu-
ral network inverse model to find the inverse model
of the system with an offline identification: it allows
to reconstruct the control signal and so to deduce the
perturbation. The main drawback of this method is
that it supposes that the perturbation signal is avail-
able during the training process. Moreover, the iden-
tification of the static inverse neural network model is
not efficient in case of parameter variations. (Talebi
et al., 2010) and (Lakhal et al., 2010) have devel-
oped an adaptive observer based on backpropagation
which is a well-known neural network learning algo-
rithm (Werbos, 1974). An idea could be to combine
this method with a disturbance observer. However the
steady state error, although bounded, does not asymp-
totically converge to zero and the disturbance may not
be well reconstructed.
In this study, the aim is to asymptotically
reconstruct the perturbation without any direct
measurement of the perturbation.
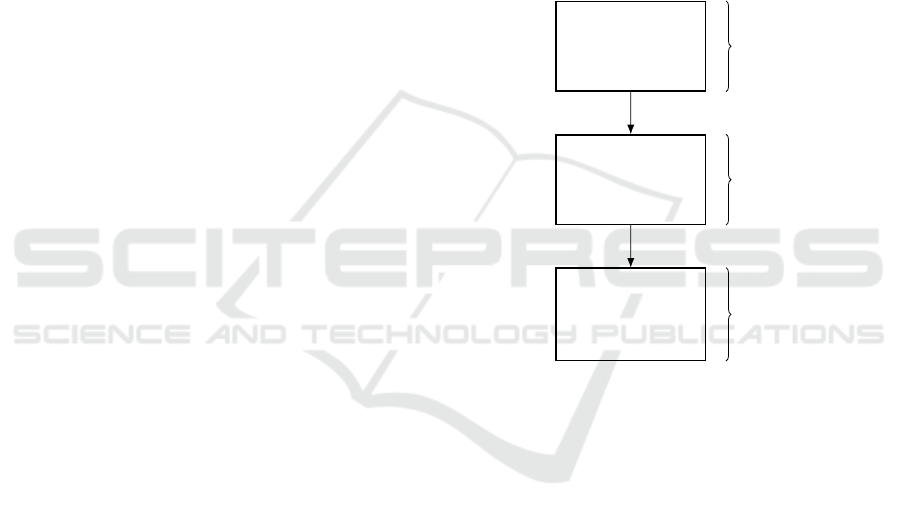
To improve the predictor performance for a plant
subject to a varying disturbance, the following three
steps methodology, summarized in figure 2, is pro-
posed in this paper:
• The plant is modelled as a State-Space Neural
Network (SSNN), offline trained without distur-
bances. This neural network structure has been
chosen because, contrary to the NARX structure,
it can be easily used as an observer.
• The state of the SSNN model is augmented
with the searched disturbance to be reconstructed.
Then, by using this new augmented model, an Ex-
tended Kalman Filter (EKF) reconstructs the aug-
mented state and thus the disturbance.
• The observed disturbance is finally used as a feed-
back compensator for the purpose of compensat-
ing the perturbation effect.
This paper is organized as follows. In section 2,
corresponding to the first step of the methodology,
the structure of the neural network used to model the
plant and the associated training method is presented.
The second step is presented, in section 3 where the
EKF formulation is reminded and applied to a simple
example of SSNN. Finally, the compensator design
is the core of section 4. Numerical results to prove
the viability of the approach are given in section 5
and section 6 concludes and gives some forthcoming
works.
This study can easily be extended to MIMO (Multi
Input Multi Output) systems but, for simplicity of
equations and schemes, we will only present the
method for SISO (Single Input Single Output) sys-
tems. By the way, the example corresponds to a SIMO
system.
Offline training of
the SSNN model
without any
disturbance
Augmentation of
the SSNN state with
the disturbance Γ
and realization of
an EKF
Use of the
estimated
disturbance as a
feedback
compensator
Step 1
Section 2
Step 2
Section 3
Step 3
Section 4
Figure 2: Three steps proposed method.
2 STATE-SPACE NEURAL
NETWORK MODELING
2.1 State-Space Neural Network
(SSNN)
In order to be able to model any kind of nonlinear-
ity we have chosen to use a neural network (Hagan
et al., 1996) due to its ability to approximate any kind
of static function (Cybenko, 1989). Because of the
dynamical property of the considered system, it is re-
quired to use recurrent neural networks (RNN). It ex-
ists many different structures of recurrent neural net-
works, (De Jesus and Hagan, 2007) gives some exam-
ples. The SSNN structure (Figure 3) seems us more
suitable to be used in nonlinear observer techniques
such as extended Kalman filter. Some properties of
the SSNN structure can be found in (Zamarre
˜
no and
Vega, 1998).
Enhancing Neural Network Prediction against Unknown Disturbances with Neural Network Disturbance Observer
211
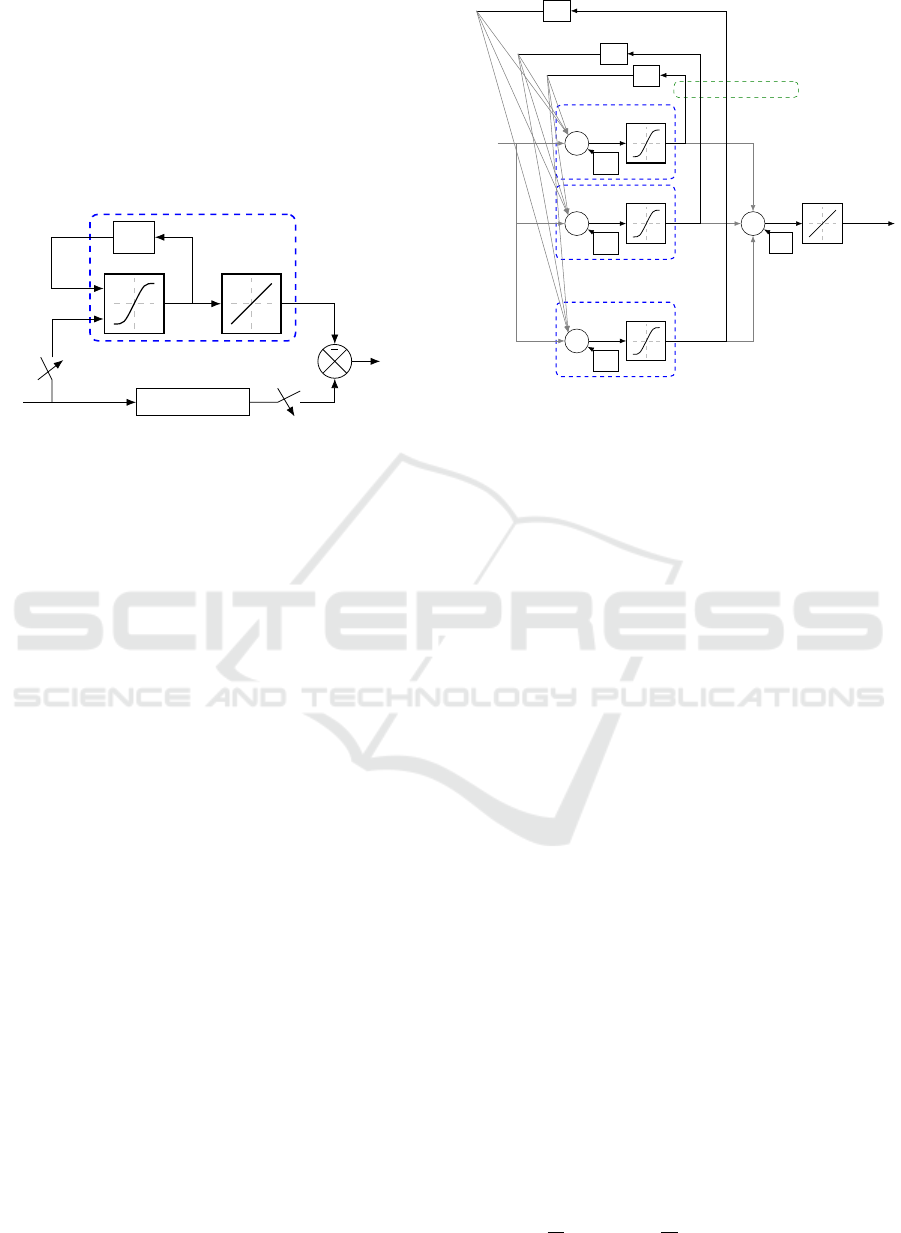
Figure 3 defines the following notation: u is the
input signal, T
e
is the sampling period, k the sampling
index, X the internal state vector of the SSNN, y
NN
the
output of the SSNN, y the output of the plant, e the er-
ror between the plant and the model and z
−1
the delay
operator. The hidden layer has a nonlinear activation
function and the output layer has a linear activation
function.
SSNN
Plant
z
−1
u(t)
e[k]
y
NN
[k]
X[k]
T
e
y(t)
T
e
y[k]
Figure 3: SSNN model of the plant.
The SSNN structure contains internal states that
model the dynamics of the system. The number of
neurons of the hidden layer, noted n, is equal to the
number of internal states. These states do not have
any physical meaning and n is a compromise between
accuracy of the model and complexity (essentially in
terms of computation time and memory needed for
the learning process). The SSNN is represented by:
X[k +1] = σ(W
h,u
u[k] +W
h,X
X[k] + B
h
)
y
NN
[k] = W
f
X[k] + B
f
, (1)
where X ∈ R
n×1
is the internal state vector, W
h,u
∈
R
n×1
are the weights of the first layer related to the
input u, W
h,X
∈ R
n×n
the weights of the first layer re-
lated to the state X, B
h
∈ R
n×1
the bias of the first
layer, W
f
∈ R
1×n
the weights of the final layer, B
f
∈ R
the bias of the final layer. The activation function of
the hidden layer σ is the sigmoid function defined by:
σ(x) = 1/(1 + exp(−x)). (2)
This activation function has to be evaluated for
each component of the vector in (1). Equation (1)
is directly a state-space representation of a nonlinear
system. The identification process (also named learn-
ing or training process) aims to determine the values
of W
h,u
, W
h,X
, B
h
, W
f
and B
f
.
Figure 4 shows the details of the internal SSNN
structure. We note B
h
= [b
h
1
,.. . ,b
h
n
]
T
.
Neuron 1
Neuron 2
Neuron n
Σ
b
h
1
Σ
b
h
2
Σ
b
h
n
.
.
.
.
.
.
Σ
B
f
z
−1
z
−1
.
.
.
z
−1
··· n states
u[k]
y
NN
[k]
Figure 4: SSNN (grey arrows are weighted connections).
2.2 Training task of the State-Space
Neural Network
The identification process is realized offline once for
all. All training data can be acquired with or with-
out disturbances. However, in the former case, the
estimated disturbance will not correspond to the real
one because the SSNN model will take into account
the disturbance included in the training data. For in-
stance, if the training set contains an additive input
disturbance Γ
train
and if we use the system in pres-
ence of another disturbance Γ
use
then the estimated
disturbance
ˆ
Γ will be defined by (3).
ˆ
Γ = Γ
use
− Γ
train
. (3)
For clarity, we suppose in the sequel that the train-
ing data are obtained without disturbances.
Because the SSNN is a recurrent neural network,
classical learning algorithms such as Backpropaga-
tion [8] cannot be used. Many learning algorithms
have been developed to deal with recurrent neu-
ral networks such as Real Time Recurrent Learning
(RTRL) (Williams and Zipser, 1989), BackPropaga-
tion Through Time (BPTT) (Werbos, 1990) and De-
coupled Extended Kalman Filter (DEKF) (Haykin,
2004). The two main learning algorithms for RNN are
RTRL and BPTT which are both presented in (Hagan
et al., 1996). The RTRL, combined with the well-
known Levenberg-Marquardt (LM) method (Leven-
berg, 1944), (Marquardt, 1963), is used in this study.
These algorithms use the cost function defined by (4).
J
c
=
1
n
s
n
s
∑
k=1
e
2
[k] =
1
n
s
n
s
∑
k=1
(y[k] − y
NN
[k])
2
, (4)
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
212
where n
s
is the number of samples.
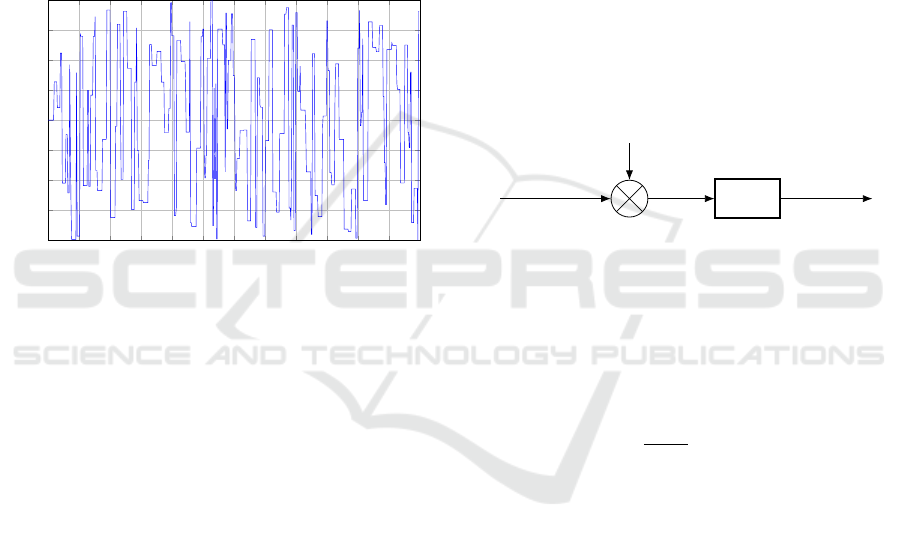
Usually, the input signal is chosen to be square
with random amplitudes and durations (between min-
imum and maximum values defined by the user) in
order to stimulate the system for all possible config-
urations. For that purpose, it is supposed that bounds
on the admissible input amplitudes are known as well
as an order of magnitude of the system time response.
For instance, a possible input signal for a system with
input levels in the range [−2;2] and a time response
equals to 1s is presented in figure 5.
In the sequel, all inputs and outputs data have to
be normalized.
0
5
10
15
20
25
30
35
40
45 50 55 60
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Time (s)
Amplitude
Input
Figure 5: Example of input signal.
RTRL is a deterministic algorithm but a starting
point is needed and randomly chosen. Thus, several
runs with different initializations can be done, hoping
the result to be closer to the global minimum. More-
over, in order to avoid overfitting (and so to improve
the prediction capacity with regard to different operat-
ing conditions) an early stopping has been performed
by using a validation set as proposed in (Sarle, 1995).
The data set is thus divided in three different sets: a
training set, a validation set and a test set. The train-
ing set is used to train the system, the validation set
is used for generalization purpose and the test set is
used to test the neural network at the end of the train-
ing. Finally, the stopping criterion consists in one of
these conditions:
• the maximum number of iterations has been
reached,
• the cost function has reached the minimum value
defined by the user,
• the cost function evaluated with the validation set
has increased for n
v
consecutive times, where n
v
is an integer defined by the user.
The reader can get more information about RTRL
and LM respectively in (Williams and Zipser, 1989)
and (Gavin, 2017). The training of RNN can be a
challenging task for some systems. (Pascanu et al.,
2013) presents some difficulties that can occur during
the training and some solutions to improve the learn-
ing.
3 STATE-SPACE NEURAL
NETWORK DISTURBANCE
OBSERVER
3.1 Disturbance Model
As shown in figure 6, we consider in this paper that
a disturbance is added at the input of the system. As
a reminder, this disturbance can model external per-
turbations or internal parameter variations providing
that, depending on the system, they are small enough.
Disturbance Γ
Plant
Command u
u + Γ
Output y
Figure 6: Disturbed plant.
3.2 Augmented State with Disturbance
A common method to estimate disturbances is to
complete the state with a new state Γ that represents
the disturbance by enforcing:
dΓ(t)
dt
= 0, (5)
The new augmented state vector X
e
can now be
defined from the model proposed in figure 6 in which
the plant is the SSNN and X
e
= (X
T
,Γ
T
)
T
. In discrete
time we get (6).
X
e
[k + 1] =
σ
W
h,u
(u[k] +C
1
X
e
[k])
+W
h,X
C
2
X
e
[k] + B
h
C
1
X
e
[k]
y
NN
[k] = W
f
C
2
X
e
[k] + B
f
,
(6)
where C
1
= [0
1×n
1] and C
2
= [I
n×n
0
n×1
].
Given X
e
from (6), we can implement a state ob-
server that will estimate X
e
and thus Γ.
3.3 Extended Kalman Filter (EKF)
The system (6) can be observed by using many non-
linear observation methods such as sliding mode ob-
server (Alessandri, 2000), EKF (Terejanu, 2008),
Enhancing Neural Network Prediction against Unknown Disturbances with Neural Network Disturbance Observer
213
Unscented Kalman Filter (UKF) (Wan and Van
Der Merwe, 2000), high-gain observer (Bullinger and
Allg
¨
ower, 1997) or extended Luenberger observer
(Grossman, 1999). The EKF, which is a nonlin-
ear derivation of the original Kalman filter (Kalman,
1960), is used in this paper, for its simplicity of im-
plementation even if tuning the weights may be some-
times difficult. Considering a system defined by:
X
e
[k + 1] = f (X
e
[k], u[k],w[k])
y
NN
[k] = h(X
e
[k], v[k])
. (7)
w[k] and v[k] are two white Gaussian noises with re-
spective covariance matrices Q[k] and R[k] that can
be used as tuning weights for the filter. One iteration
of the Extended Kalman Filter is concerned with two
steps, the prediction and the update ones, where the
use of the “hat” notation denotes the estimated val-
ues.
• Prediction step:
X
e
[k | k − 1] = f (
ˆ
X
e
[k − 1],u[k], 0)
P[k | k − 1] = F[k]P[k − 1]F
T
[k] + Q[k]
.
(8)
• Update step:
˜y
NN
[k] = y[k] − h
ˆ
X
e
[k | k − 1],0
S[k] = H[k]P[k | k − 1]H
T
[k] + R[k]
K[k] = P[k | k − 1]H
T
[k]S
−1
[k]
ˆ
X
e
[k] = X
e
[k | k − 1] + K[k] ˜y
NN
[k]
P[k] = (I − K[k]H[k])P[k | k − 1]
. (9)
Where F[k] =
∂ f
∂X
e
ˆ
X
e
[k−1],u[k]
and H[k] =
∂h
∂X
e
X
e
[k|k−1]
.
F[k] and H[k] can be easily computed from (6) since
the sigmoid function is differentiable:
σ
(1)
(x) =
dσ(x)
dx
=
exp(−x)
(1 + exp(−x))
2
(10)
and h is a linear function in the considered case (see
(6)). For instance, F and G are given in section 3.4
for a 2-neurons SSNN.
As states of the SSNN have no physical meaning,
an accurate reconstruction of all states is not the pri-
ority. It is suggested to tune the filter to give more
importance to the disturbance, that is the last compo-
nent of X
e
.
3.4 Example for a Two-neurons SSNN
To illustrate the computation of matrices F[k] and
H[k] of the Kalman filter, a model with two neurons
and dΓ(t)/dt = 0 is considered in this section.
Neuron 1
Neuron 2
Σ
b
h
1
Σ
b
h
2
Σ
B
f
z
−1
z
−1
Γ[k]
u[k]
y
NN
[k + 1]
w
u
1
w
u
2
w
y
1
w
y
2
x
1
[k + 1]
x
2
[k + 1]
w
x
1,1
w
x
2,1
w
x
1,2
w
x
2,2
Figure 7: Two neurons SSNN.
Figure 7 presents such a two-neurons SSNN.
We use the following notations: X
e
= (x
1
x
2
Γ)
T
,
W
h,u
= (w
u
1
w
u
2
)
T
, B
h
= (b
h
1
b
h
2
)
T
, W
f
= (w
y
1
w
y
2
)
and W
h,x
=
w
x
1,1
w
x
1,2
w
x
2,1
w
x
2,2
.
Using (6) and dΓ(t)/dt = 0, ones can get:
x
1
[k + 1] = σ
w
x
1,1
x
1
[k] + w
x
1,2
x
2
[k]
+w
u
1
(u[k] + Γ[k]) + b
h
1
}
= σ(α[k])
x
2
[k + 1] = σ
w
x
2,1
x
1
[k] + w
x
2,2
x
2
[k]
+w
u
2
(u[k] + Γ[k]) + b
h
2
}
= σ(β[k])
Γ[k + 1] = Γ[k]
.
(11)
We obtain
F[k] =
w
x
1,1
σ
(1)
(α[k]) w
x
1,2
σ
(1)
(α[k]) w
u
1
σ
(1)
(α[k])
w
x
2,1
σ
(1)
(β[k]) w
x
2,2
σ
(1)
(β[k]) w
u
2
σ
(1)
(β[k])
0 0 1
!
(12)
and
H[k] = (w
y
1
w
y
2
0). (13)
Obviously, the computation of F and G can be easily
extended for a network with more neurons.
4 ROBUST NEURAL NETWORK
BASED PREDICTOR
In this section, the observed disturbance is used as a
feedback signal in order to compensate perturbations
or small parameter variations of the plant. A new
global model, which is less disturbed, is obtained.
Thus, it will be easier to train this model with a FNN
used as a predictor as shown in figure 1.
The proposed solution is shown in figure 8 where
ˆ
Γ corresponds to the estimated disturbance. The neu-
ral network can be tuned online as it has been done in
(Bao et al., 2017). Note that this solution may cause
instability due to the feedback created with the EKF.
Proving the stability of the closed-loop with the EKF
is not a trivial task, and forthcoming works will aim
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
214
to use other observer techniques such as sliding mode
observer or high-gain observer in order to study the
global stability.
Undisturbed plant approximation
Plant
EFK/SSNN
observer
Neural network
u
Γ
y
ˆ
Γ
T
e
Figure 8: Feedback compensation of disturbances.
It appears to be difficult to train offline the neural
network presented in figure 8 because adaptive gain
K (see (9)) is varying and a fixed neural network will
not be able to get the dynamics.
One drawback of this structure is that neural net-
work predictor trained online (using FNN as pre-
sented in figure 1) on the global plant requires more
neurons than a neural network predictor would need
for the plant alone. Moreover, the online training can
only be accurate if the input signal u has a sufficiently
rich content of frequency and amplitude variations.
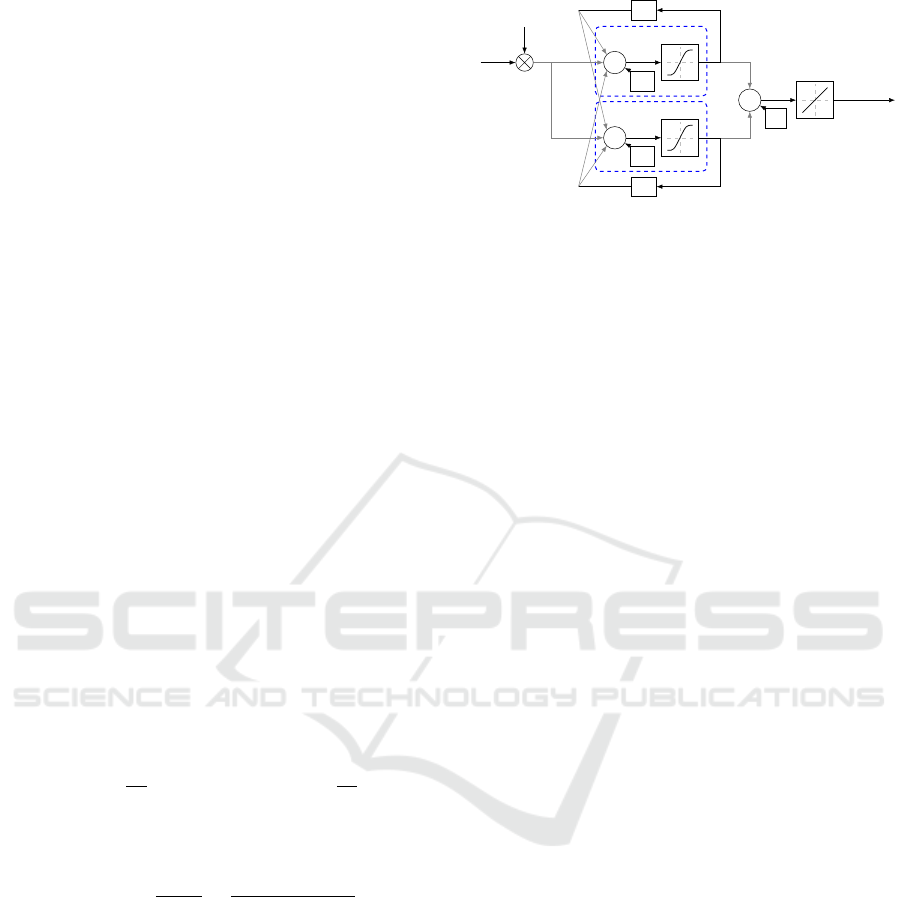
5 NUMERICAL EXAMPLE
In this section, the numerical example presented in
figure 9 (where s is the Laplace variable) is chosen to
illustrate the proposed approach. Table 1 gives all pa-
rameter values for this example. To show the generic-
ity of the model with regard to nonlinearities, the ex-
ample has been chosen to include differentiable and
non-differentiable nonlinearities. To begin with, the
inefficiency of the predictor trained without perturba-
tion in a disturbance environment is shown. More-
over, this predictor is not accurate when it is trained
with a disturbance if this disturbance varies or van-
ishes. Finally, the three steps defined in figure 2 are
applied.
5.1 False Prediction in Case of
Disturbance
As said in the introduction section, the method pro-
posed in figure 1 leads to poor prediction results
when a disturbance appears and the predictor has
been trained using non-disturbed data. Figure 10(a)
K
1
1+
2ξ
1
w
0,1
s+
s
2
w
2
0,1
sin
4
4
K
2
1+
2ξ
2
w
0,2
s+
s
2
w
2
0,2
u
y
1
y
2
−
Γ
Figure 9: Studied system.
Table 1: Parameters.
Parameter Value Unit
K
1
2 -
ξ
1
0.5 -
w
0,1
150 rad.s
−1
K
2
4 -
ξ
2
0.05 -
w
0,2
300 rad.s
−1
T
e
10
−3
s
Start of the dead zones −0.2 -
End of the dead zones 0.2 -
presents prediction on undisturbed system (Γ = 0, in
figure 9) and figure 10(b) presents prediction on the
system disturbed by: Γ(t) = 0.2sin(2πt).
Figure 10(a) shows that the neural network is well
trained and gives accurate results in the nominal case
(Γ = 0). Figure 10(b) shows how the prediction is
affected by the input disturbance; first output gives
acceptable results but second output prediction is far
from real data.
The next section will show that the same phe-
nomenon arises if the neural network is trained with a
disturbance.
5.2 Offline Training with a Disturbance
A neural network offline trained with a disturbance
cannot accurately predict the output if the disturbance
varies or vanishes. To this end, a FNN is trained on
the system presented in figure 9 with a sinusoidal in-
put disturbance ( f = 1Hz). Figure 11 presents the pre-
diction (obtained from the method explained in fig-
ure 1) in the presence of the same disturbance, the
prediction without any disturbance and the prediction
with a sinusoidal input disturbance with f = 10Hz.
Figure 11 shows that the trained neural network
is specific to the sinusoidal input disturbance with
f = 1Hz as without any disturbance and for another
frequency the prediction is incorrect for the second
output and less accurate with regard to the first input.
Section 5.1 and 5.2 have shown that using the
method presented in figure 1 leads to poor prediction
results in the face of varying disturbance profiles. The
Enhancing Neural Network Prediction against Unknown Disturbances with Neural Network Disturbance Observer
215
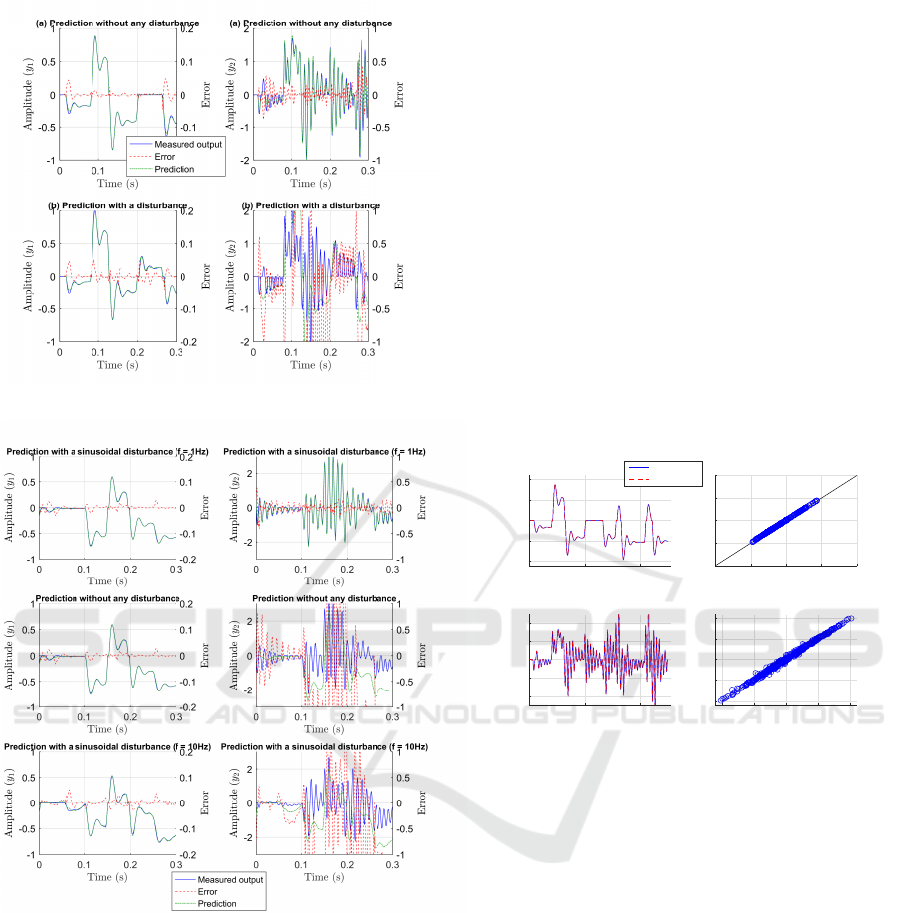
Figure 10: Influence of a disturbance on the prediction.
Figure 11: Influence of different disturbances on the predic-
tion.
following part corresponds to the proposed method to
enhance prediction against unknown disturbances.
5.3 Enhancing Prediction with the
Proposed Method
5.3.1 Offline Training of the State-Space Neural
Network
This section corresponds to the first step of the
method described in figure 2. A SSNN with 50 neu-
rons in the hidden layer is chosen. The system has
been sampled at sampling time T
e
and we have used
10000 samples for the training set and 10000 samples
for the validation set. As explained previously, data
have been obtained without any disturbances, that is
Γ = 0 in figure 9, and have been normalized. The in-
put training sequence is constrained to [−1;1].
Figure 12 shows the results for training (several
runs have been performed but only the best result in
terms of cost function is presented) by presenting a
simulation on a test set which is different from the
training set. Regression, which corresponds to the
plot of the output of the model as a function of the
measured output, shows the training accuracy since it
is close to the first bisector (for a perfect training the
regression would have been exactly on the first bisec-
tor). It can be seen that the training is somewhat better
for the first measure than it is for the second one. Us-
ing more neurons would lead to more accurate results.
0 0.2 0.4
Time (s)
-1
-0.5
0
0.5
1
Amplitude
Output 1
-2 -1 0 1 2
y
measured
-2
-1
0
1
2
y
NN
Regression (Output 1)
-2 -1 0 1 2
y
measured
-2
-1
0
1
2
y
NN
Regression (Output 2)
0 0.2 0.4
Time (s)
-2
-1
0
1
2
Amplitude
Output 2
Measure
SSNN Model
Figure 12: Learning results on a test scenario (different
from the training scenario).
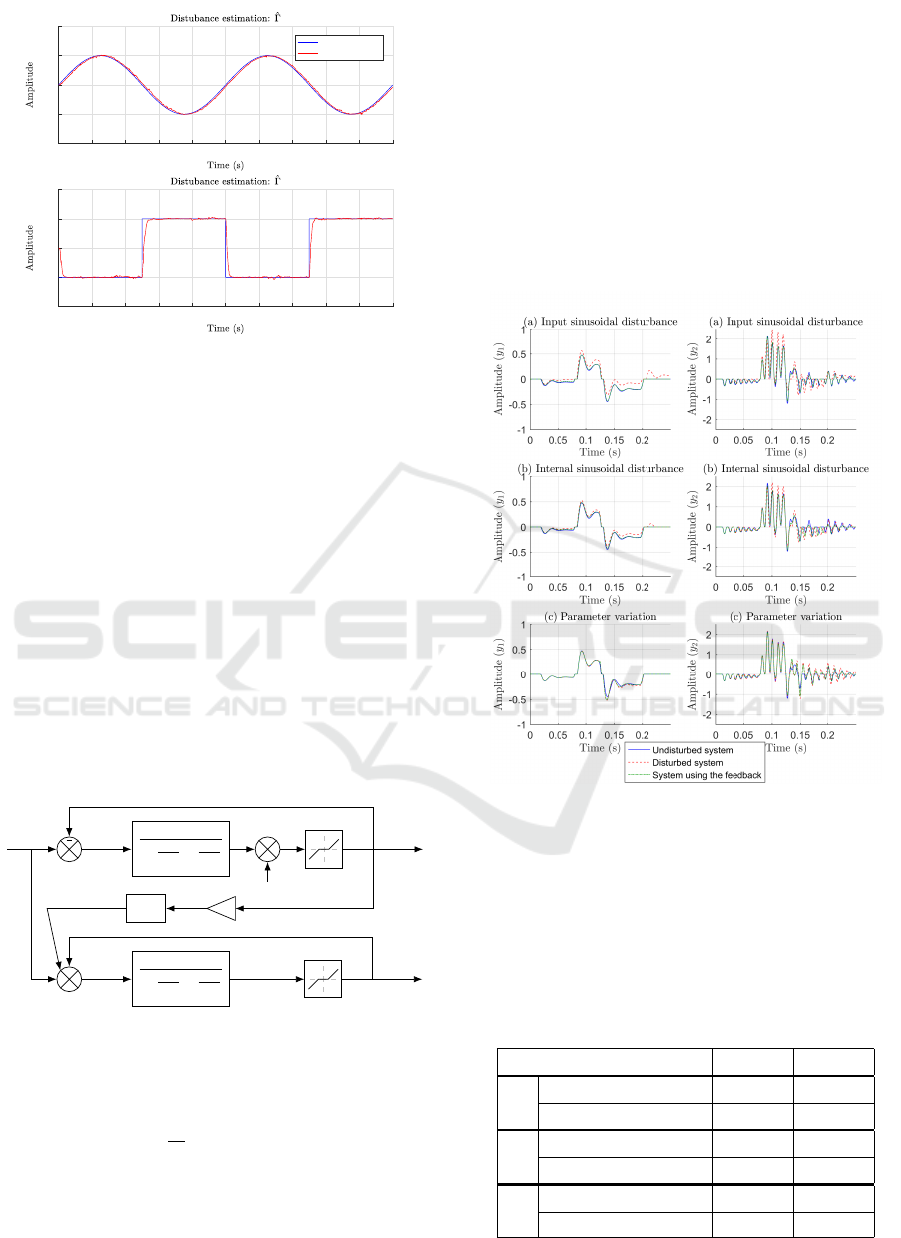
5.3.2 Extended Kalman Filter Implementation
The following part corresponds to the second step of
the method described in figure 2. We implement the
EKF by using a reasoning similar to the one done in
section 3.4 by using the SSNN model.
Experiment results done using the system pre-
sented in figure 9 are presented in figure 13 for two
different perturbations: the first one corresponds to a
sinusoidal signal and the second one to a square sig-
nal.
The modelling error has a direct influence on
the estimated disturbance. The result shows that the
method is able to reconstruct the disturbance with a
good accuracy.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
216
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.4
-0.2
0
0.2
0.4
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.4
-0.2
0
0.2
0.4
Real disturbance
Estimation
Figure 13: Estimated disturbance.
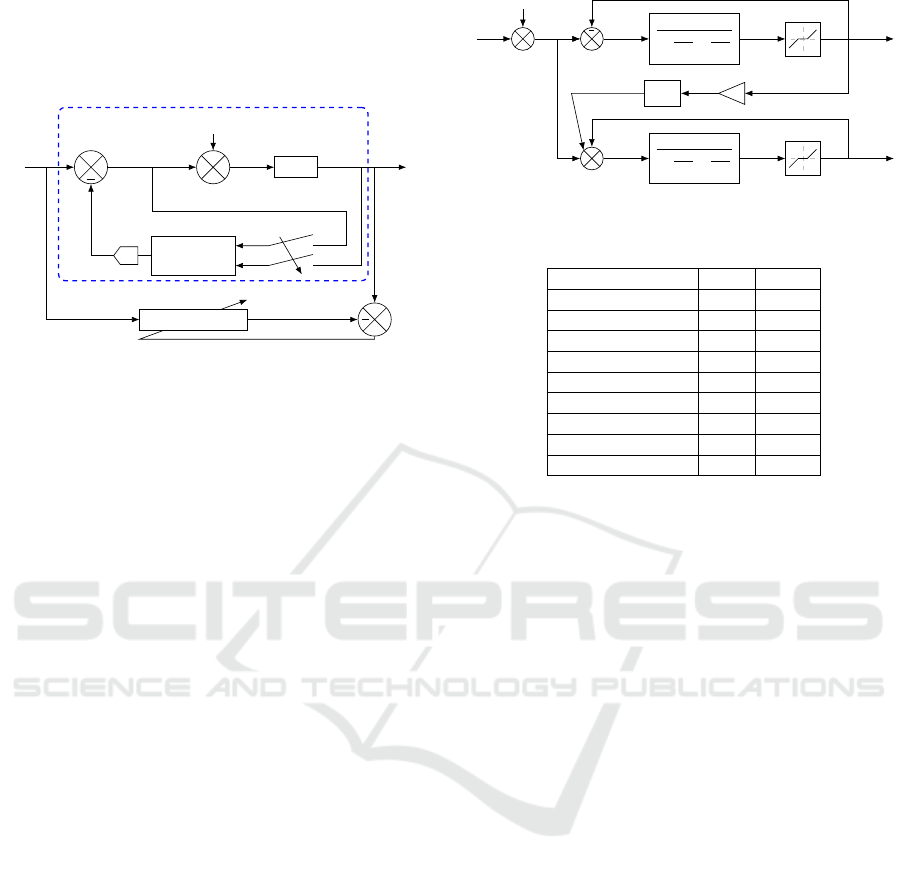
5.3.3 Implementation of the Feedback
Compensator
The solution proposed in section 4 and figure 8 is now
tested to see the robustness of the plant against differ-
ent disturbances. It corresponds to the third step of
figure 2. Three kinds of experiments have been done:
the first one corresponds to a system subject to an ad-
ditive sinusoidal disturbance input (Figure 6), the sec-
ond one to a system subject to an internal sinusoidal
disturbance for the first measure (Figure 14) and the
last one corresponds to a parameter variation. Results
are respectively presented in figure 15 (a), (b) and (c).
For the case (c) the gain K
1
is multiplied by a factor
1.2 at time t = 0.125s in order to simulate an internal
parameter variation. Ideally, the solid blue line and
the dash-dot green line should be identical.
K
1
1+
2ξ
1
w
0,1
s+
s
2
w
2
0,1
sin
4
4
K
2
1+
2ξ
2
w
0,2
s+
s
2
w
2
0,2
u
y
1
y
2
−
Γ
Figure 14: Internal disturbance.
A cost function is introduced in order to compare
the invariance of the system as:
I
v,p
=
1
n
s
n
s
∑
i=1
(y
I,p
− y
p
)
2
, (14)
where the index p refers the output p, y
I,p
is the out-
put of the disturbed system, corresponding to the dash
red line in figure 15 or the output of the system us-
ing the feedback, corresponding to the dash-dot green
line. Results are summed up in Table 2 where the
case (a),(b) and (c) correspond to those presented in
figure 15.
We can see from figure 15 (a-c) and Table 2 that
the system is less sensitive to disturbances even if the
disturbance applied to the plant is not an additive in-
put disturbance as considered in the model used in the
EKF. As shown with figure 13, the estimated distur-
bance also contains the model error thus, results pre-
sented in figure 15 can be improved if a better model
is used, which means using more neurons or by re-
training the neural network with other starting points.
Figure 15: Invariance of the system using the feedback
structure proposed in section 4.
Because the system is unvarying against distur-
bances, we can conclude that the global new system
can be modeled by a FNN trained online as it has been
done in (Bao et al., 2017). The predictor that arises
from this FNN will be less sensitive to disturbances
and thus be efficient.
Table 2: Performance comparison.
Case I
v,1
I
v,2
(a)
Disturbed system 7.8 ∗ 10
−3
1.5 ∗ 10
−1
System using the feedback 1.0 ∗ 10
−4
1.1 ∗ 10
−2
(b)
Disturbed system 2.0 ∗ 10
−3
5.2 ∗ 10
−2
System using the feedback 3.7 ∗ 10
−4
2.8 ∗ 10
−2
(c)
Disturbed system 8.1 ∗ 10
−4
5.1 ∗ 10
−2
System using the feedback 6.3 ∗ 10
−4
4.4 ∗ 10
−2
Enhancing Neural Network Prediction against Unknown Disturbances with Neural Network Disturbance Observer
217

6 CONCLUSION
In this paper, a way to enhance neural network pre-
diction against unknown disturbances has been pre-
sented, thanks to a feedback structure that uses the
observed disturbance reconstructed by an extended
Kalman filter based on a state-space neural net-
work model. Numerical results obtained for a system
with non-differentiable and differentiable nonlineari-
ties have proven the interest in the proposed approach,
exhibiting satisfactory results in terms of prediction
errors and robustness against variations of the distur-
bance input profiles or parameter variations. These
results have been obtained at the price of a slight in-
crease in the predictor complexity, as the neural net-
work used for the prediction for the global system,
containing both the system and the observer, gener-
ally requires more neurons than a neural network pre-
dictor for the original system alone.
Future works will deal with improving learning
methods for SSNN and combining this work with the
Decoupled Extended Kalman Filter neural network
learning method (Puskorius and Feldkamp, 1997) in
order to get an adaptive filter. Other observer tech-
niques will also be tested in order to achieve a fair
comparison of the possible approaches. Finally, the
estimated disturbance can be used to obtain a distur-
bance predictor in the case of a control law design.
REFERENCES
Alessandri, A. (2000). Design of sliding-mode observers
and filters for nonlinear dynamic systems. In Proceed-
ings of the 39th IEEE Conference on Decision and
Control, volume 3, pages 2593–2598. IEEE.
Bao, X., Sun, Z., and Sharma, N. (2017). A recurrent neu-
ral network based MPC for a hybrid neuroprosthesis
system. In IEEE 56th Annual Conference on Decision
and Control, pages 4715–4720. IEEE.
Bullinger, E. and Allg
¨
ower, F. (1997). An adaptive high-
gain observer for nonlinear systems. In 36th IEEE
Conference on Decision and Control, pages 4348–
4353.
Chen, W.-H., Ballance, D. J., Gawthrop, P. J., and O’Reilly,
J. (2000). A nonlinear disturbance observer for robotic
manipulators. IEEE Transactions on industrial Elec-
tronics, 47(4):932–938.
Cybenko, G. (1989). Approximation by superpositions of
a sigmoidal function. Mathematics of control, signals
and systems, 2(4):303–314.
De Jesus, O. and Hagan, M. T. (2007). Backpropagation al-
gorithms for a broad class of dynamic networks. IEEE
Transactions on Neural Networks, 18(1):14–27.
Diaconescu, E. (2008). The use of narx neural networks
to predict chaotic time series. Wseas Transactions on
computer research, 3(3):182–191.
Gavin, H. (2017). The levenberg-marquardt method for
nonlinear least squares curve-fitting problems. De-
partment of Civil and Environmental Engineering,
Duke University.
Grossman, W. D. (1999). Observers for discrete-time non-
linear systems.
Hagan, M. T., Demuth, H. B., Beale, M. H., et al. (1996).
Neural network design, volume 20. Pws Pub. Boston.
Haykin, S. (2004). Kalman filtering and neural networks,
volume 47. John Wiley & Sons.
Hedjar, R. (2013). Adaptive neural network model predic-
tive control. International Journal of Innovative Com-
puting, Information and Control, 9(3):1245–1257.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Journal of basic Engineer-
ing, 82(1):35–45.
Keviczky, T. and Balas, G. J. (2006). Receding horizon con-
trol of an f-16 aircraft: A comparative study. Control
Engineering Practice, 14(9):1023–1033.
Lakhal, A., Tlili, A., and Braiek, N. B. (2010). Neural net-
work observer for nonlinear systems application to in-
duction motors. International Journal of Control and
Automation, 3(1):1–16.
Levenberg, K. (1944). A method for the solution of cer-
tain non-linear problems in least squares. Quarterly
of applied mathematics, 2(2):164–168.
Marquardt, D. W. (1963). An algorithm for least-squares
estimation of nonlinear parameters. Journal of
the society for Industrial and Applied Mathematics,
11(2):431–441.
Pascanu, R., Mikolov, T., and Bengio, Y. (2013). On the
difficulty of training recurrent neural networks. In In-
ternational Conference on Machine Learning, pages
1310–1318.
Puskorius, G. and Feldkamp, L. (1997). Extensions and en-
hancements of decoupled extended kalman filter train-
ing. In International Conference on Neural Networks,
volume 3, pages 1879–1883. IEEE.
Talebi, H. A., Abdollahi, F., Patel, R. V., and Khorasani,
K. (2010). Neural network-based state estimation
schemes. In Neural Network-Based State Estimation
of Nonlinear Systems, pages 15–35. Springer.
Terejanu, G. A. (2008). Extended kalman filter tutorial. De-
partment of Computer Science and Engineering, Uni-
versity at Buffalo.
Vatankhah, B. and Farrokhi, M. (2017). Nonlinear model-
predictive control with disturbance rejection prop-
erty using adaptive neural networks. Journal of the
Franklin Institute, 354(13):5201–5220.
Wan, E. A. and Van Der Merwe, R. (2000). The unscented
kalman filter for nonlinear estimation. In Adaptive
Systems for Signal Processing, Communications, and
Control Symposium, pages 153–158. IEEE.
Werbos, P. (1974). Beyond regression: New tools for pre-
diction and analysis in the behavioral sciences. Ph. D.
dissertation, Harvard University.
Werbos, P. J. (1990). Backpropagation through time: what
it does and how to do it. Proceedings of the IEEE,
78(10):1550–1560.
ICINCO 2019 - 16th International Conference on Informatics in Control, Automation and Robotics
218

Williams, R. J. and Zipser, D. (1989). A learning algo-
rithm for continually running fully recurrent neural
networks. Neural computation, 1(2):270–280.
Yu, D. and Gomm, J. (2003). Implementation of neural
network predictive control to a multivariable chemical
reactor. Control Engineering Practice, 11(11):1315–
1323.
Zamarre
˜
no, J. M. and Vega, P. (1998). State space neural
network. properties and application. Neural networks,
11(6):1099–1112.
Enhancing Neural Network Prediction against Unknown Disturbances with Neural Network Disturbance Observer
219
