
Indoor Localisation with Intelligent Luminaires for Home Monitoring
Iuliana Marin, Maria Iuliana Bocicor and Arthur-Jozsef Molnar
SC Info World SRL, Bucharest, Romania
Keywords:
Indoor Localization, Received Signal Strength, Trilateration, Kalman Filtering, Neural Network.
Abstract:
This paper presents the initial results of our experiments regarding accurate indoor localisation. The research
was carried out in the context of a European Union funded project targeting the development of a configurable,
cost-effective cyber-physical system for monitoring older adults in their homes. The system comprises a
number of hardware nodes deployed as intelligent luminaires that replace light bulbs present in the monitored
location. By measuring the strength of a Bluetooth Low Energy signal generated by a device on the monitored
person, a rough estimation of the person’s location is obtained. We show that the presence of walls, furniture
and other objects in typical indoor settings precludes accurate localisation. In order to improve accuracy, we
employ several software-based approaches, including Kalman filtering and neural networks. We carry out an
initial experiment showing that additional software processing significantly improves localisation accuracy.
1 INTRODUCTION
In the context of demographic and social changes
nowadays (World Health Organization, 2015) care for
older adults can be transformed according to their
own desires and necessities. Recent years have seen
a shift towards technology-driven, personalised solu-
tions designed to assist and monitor older adults living
in their own homes, with the support of their families,
friends and trained caregivers.
The work reported in this paper is part of a Eu-
ropean Union-funded research project during which a
technological platform for home monitoring and as-
sisted living was developed. This cyber-physical sys-
tem (Marin et al., 2018) is based on the use of energy-
efficient intelligent luminaires equipped with embed-
ded sensing, indoor localisation and communication
systems. They enable a pervasive, seamless, and in-
expensive home monitoring scheme. These newly de-
veloped luminaires can replace existing light bulbs,
ensuring simple and straightforward deployment. The
platform removes some of the adoption barriers faced
by such systems by reducing costs and simplifying in-
stallation. Furthermore, it conforms to standards, and
using it does not require specially trained staff.
The main system components, together with pro-
posed innovations were described in previous papers
(Marin et al., 2018; Bocicor et al., 2017). One of
the important components is the one for indoor lo-
calisation. Existing satellite-based technologies such
as GPS perform very poorly indoors due to the pres-
ence of walls and furniture, which have a detrimen-
tal effect on signal strength, thus requiring alternative
approaches. Our system employs trilateration based
on the received strength of a Bluetooth Low Energy
(BLE) signal. Other approaches include visible light
communication (Haigh et al., 2014), acoustic back-
ground fingerprinting (Tarzia et al., 2011) and user
movements (Tarrio et al., 2011). The main advan-
tages of BLE technology is the low cost of hardware
and its ubiquity in mobile devices and wearables. In
addition, Bluetooth signal is omni-directional and it
permeates walls, albeit imperfectly. We carry out an
experiment where we replace one light bulb in ev-
ery room with an intelligent luminaire incorporating
Bluetooth technology used both for localisation and
communication. This leads to a deployment that does
not require additional wires or devices and with no
components that look out of place. In addition, as
most lights are ceiling-mounted, there is less interfer-
ence from furniture or other equipment.
2 STATE OF THE ART
The last years we have witnessed a dramatic rise in the
number and diversity of intelligent devices deployed
within homes. Location-based applications play an
important role in identifying and studying user be-
haviours and their interests by analysing activities and
interactions with other people or objects.
464
Marin, I., Bocicor, M. and Molnar, A.
Indoor Localisation with Intelligent Luminaires for Home Monitoring.
DOI: 10.5220/0007751304640471
In Proceedings of the 14th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2019), pages 464-471
ISBN: 978-989-758-375-9
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

In outdoor environments, accurate location infor-
mation can be easily obtained using the Global Po-
sitioning System (GPS). While GPS positioning is
reliable outdoors, it cannot be used for accurate in-
door localisation due to poor signal strength (Ozsoy
et al., 2013). As such, efforts have been put into
designing accurate indoor positioning systems based
on acoustics, optics, Wi-Fi, Bluetooth, GSM and Ra-
dio Frequency Identification (Ta, 2017; Lymberopou-
los et al., 2015; Xiao and Zhou, 2016). Some of
these systems employ Received Signal Strength In-
dex (RSSI) (Luo et al., 2011; Sadowski and Spa-
chos, 2018; Maduskar and Tapaswi, 2017), due to
the existence of the inverse-square law between the
strength of the received signal and the distance from
the source of the electromagnetic wave (Dong and
Dargie, 2012). This relation allows determining the
distance starting from signal strength. Unfortunately,
the RSSI varies over time due to multipath fading,
with the level of fluctuation being higher in indoor en-
vironments (Pu et al., 2011). This instability degrades
localisation accuracy, keeping indoor localisation and
object detection an area of ongoing research.
One proposed solution to address RSSI measure-
ment variance is to filter RSSI values. The Simulta-
neous Localisation and Configuration algorithm pro-
posed by Bulten et al. (Bulten et al., 2016) is based
on a factored solution to the simultaneous localisa-
tion and mapping problem (FastSLAM) for localisa-
tion based on RSSI values. Everything is done locally
on the user’s device. Another approach is the Kalman
filter (Welch and Bishop, 1995), which can be used to
smooth noisy data, i.e. RSSI value estimations. This
technique is amenable for use in many contexts given
its low computational requirements. The Kalman fil-
ter is an efficient recursive filter that factually eval-
uates the internal state of a system from a series of
measurements which are subject to noise. When a
new measurement occurs, the filter uses a weighted
average for prediction, with the goal of reducing un-
certainty. The weights are computed based on the co-
variance. The weighted average is a state estimate
which is between the predicted and measured states.
This process is repeated at a certain period of time,
computing the new average and covariance for every
iteration. The Kalman filter aims to remove signal
noise when multiple measurements are taken.
In (Robesaat et al., 2017), the authors showed that
Kalman filtering increased the accuracy of the indoor
localisation of the monitored person. The Kalman
filter reduced accumulated errors by reducing noise
(Sung, 2016). It also diminished the energy consump-
tion and enhanced the stability of RSSI values.
Similar to GPS technology, indoor localisation re-
quires the use of several signal emitters. Each signal
emitter is placed at a known location, and RSSI val-
ues for each are determined to calculate the distance
between each signal emitter and the target of monitor-
ing. Using at least three signal emitters results in the
creation of three circles, the radii of which are deter-
mined by the RSSI values. The target of monitoring is
found at the point where these circles intersect. This
technique is called trilateration. Due to the issues de-
tailed above, RSSI values require post-processing and
filtering in order to achieve accurate localisation.
The system we proposed uses custom developed
BLE-enabled devices, which are physically deployed
in the form of intelligent luminaires that replace exist-
ing light bulbs (Marin et al., 2018). While the physi-
cal design of the intelligent bulbs is beyond the scope
of this paper, care was taken to ensure luminaire de-
sign does not affect signal strength or directionality.
The light bulbs are typically ceiling mounted and thus
the signal is less prone to physical and electromag-
netic obstructions.
Our experiments employ a mobile phone to emit a
BLE signal that is received by intelligent luminaires
and transformed into localisation information. Any
smartwatch or smart life saving button can act as a
signal emitter, as long as it supports the BLE stan-
dard. The main advantage of our setup is cost, both
regarding the design of the intelligent luminaires, as
well as the possibility of using a wide range of exist-
ing BLE-enabled wearable devices
3 INDOOR LOCALISATION
COMPONENT
3.1 Intelligent Luminaires
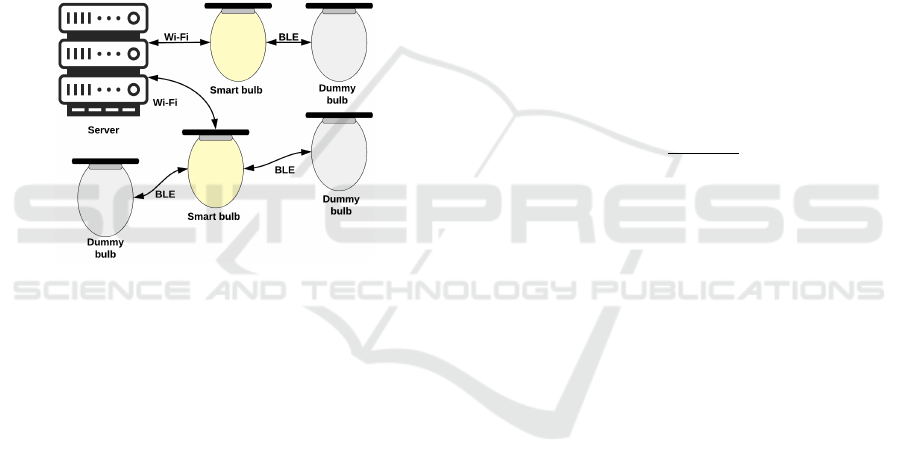
Figure 1 presents a high-level view of the system’s
deployment architecture. The hardware side of the
cyber-physical system is represented by two types of
hardware devices, dubbed as dummy and smart nodes.
Both are implemented in the form of luminaires.
Dummy nodes are designed for small size and low
cost. They also work as luminaires, but lack the ad-
vanced processing and communication functions of
the smart nodes. Their main role, besides lighting,
is to perform BLE scans for other devices and report
the RSSI values to the smart node they are connected
to. As such, dummy nodes are employed to detect
the presence of monitored persons. This design re-
duces the overall system cost and improves its accu-
racy, by allowing several inexpensive nodes to be de-
ployed and connected to the same smart node. Smart
Indoor Localisation with Intelligent Luminaires for Home Monitoring
465
nodes provide several wireless interfaces and higher
computation power than is available to dummy nodes.
Smart nodes are both Bluetooth and Wi-Fi enabled.
They also include a sensor module with a suite of sen-
sors used to monitor the indoor environment. They
receive dummy node readings via Bluetooth, process
them and transmit them to the software server using a
permanent Wi-Fi connection. In order to achieve this,
every monitored room typically includes between 1
and 3 luminaires, depending on its size and shape. By
replacing ceiling mounted light bulbs with intelligent
devices, homes and buildings can be monitored with
minimal installation and maintenance costs. In ad-
dition, when deploying the system in more personal
spaces, such as hospital wards, or in the homes of
older adults with the purpose of monitoring, they have
the advantage of being inconspicuous.
Figure 1: High-level architecture of the system.
Communication between smart and dummy bulbs
is achieved via BLE technology. To establish a BLE
connection, the smart bulb acts as a master, perform-
ing a scan to detect dummy bulbs in its proximity,
while the dummy acts as a slave, advertising itself.
On the other hand, the dummy must also be able to
scan the environment and detect additional devices,
such as those employed for localisation. As such, it
must also act as a master. As a result of these con-
straints, smart and dummy bulbs switch between roles
with regularity. For a certain period of time, each
node acts as a slave, emitting advertisement packets
detected by bulbs in a master role, and then switches
to slave mode, in order to detect and maintain infor-
mation about other devices.
The localisation algorithms based on the RSSI val-
ues are run on the system’s server several times ev-
ery minute, and the retrieved indoor coordinates are
recorded in a database. Considering current and re-
cent positions of the monitored person, the system is
able to detect possibly dangerous situations and emit
real time alerts, which are sent to designated care-
givers. As an example, assuming that the monitored
person has been in the bathroom for too long, using
a custom period defined at system configuration, the
platform will generate and send an alert to their care-
giver.
3.2 Methodology
In this section we present the direct and hybrid meth-
ods that we use to accurately identify the indoor po-
sition of the monitored person. Direct trilateration
and prediction of coordinates via an artificial neural
network are the two major techniques we are using.
Furthermore, we employ Kalman filtering (Welch and
Bishop, 1995) to account for the inherent noise of
RSSI measurements.
3.2.1 Direct Trilateration
To convert RSSI values into distance measurements
we use the RSSI lognormal model described in (Dong
and Dargie, 2012), in which the distance can be com-
puted as shown in Formula 1:
d =
10
A−RSSI
10 ∗ n
(1)
In Formula 1 the significance of variables is as fol-
lows:
• n represents the path-loss exponent and it ranges
between 2 to 6 for indoor environments.
• A is the signal strength expressed in dBm, mea-
sured from a distance of one meter. This parame-
ter is experimentally computed once for each type
of luminaire.
• RSSI is the received signal strength index. This is
the measure the system uses for trilateration.
• d is the computed distance. It is the distance be-
tween the luminaire that makes the measurement
and the person being monitored, or more specifi-
cally the Bluetooth device that the person has on
them, such as a smartphone or smartwatch.
The distance is calculated relative to minimum 3
intelligent luminaires in order to achieve trilateration.
Following the calculations, at least three values are
deduced, for the three distances which represent the
three circles’ radii. The person’s location is computed
as the point of intersection of these circles. Because
of various environment interference caused by objects
blocking the signal, RSSI values are subject to noise.
We evaluate three different techniques to reduce noise
and improve the accuracy of localisation.
First, location at each recorded timestamp is not
computed using the RSSI value at that particular
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
466

timestamp, but considering an average of RSSI val-
ues. Let us consider n RSSI values for each moment
in time when signal strength was recorded, for each of
the considered luminaires (l
1
i
, l
2
i
, ··· , l
n
i
), where i ≥ 3.
To compute the location at time t (1 ≤ t ≤ n) an
option would be to use all RSSI values recorded at
time t (l
t
1
, l
t
2
, l
t
3
), compute the distances according to
Formula 1 and identify the intersection point of the
three circles having as radii the computed distances
at each moment t. However, the noise present in
RSSI measurements precludes us from doing this. We
use a different approach, one that involves the last 10
recorded RSSI values, for each luminaire (l
t−10
i
, l
t−9
i
,
·· ·, l
t−1
i
). The reasoning is that single-reading RSSI
errors will be attenuated when taking multiple read-
ings over a longer time interval. Thus, for each intel-
ligent bulb, out of these ten values possible outliers
are eliminated and then the average avg
t
and stan-
dard deviation stdev
t
are computed. Out of all ten
values, we retain only those that are within the inter-
val [avg
t
−stdev
t
, avg
t
+stdev
t
] and use their average
to compute the distance.
The second technique used to account for noise is
Kalman filtering. Starting from observed noisy mea-
surements and assuming a Gaussian distributed noise,
this algorithm infers the parameters of interest, taking
into account the history of measurements. For this
specific case the Kalman filter will be used to make
estimations of noise-free signal strength values. The
process is based on two equations that describe the
system’s state: one defines the observed measurement
in relation to the real measurement and noise and the
other defines the current estimate recursively, using
the previous estimate. There are two main steps to be
performed: a prediction about what the state should
be and an update to this prediction, based on the mea-
surement data and the old estimate. For each moment
in time we compute the RSSI estimates, using Kalman
filtering. Then the trilateration is performed using the
distances obtained starting from these estimates.
The final technique is a combination of the pre-
viously presented methods: initially, a Kalman filter
is applied on the raw RSSI values and the RSSI es-
timations are obtained. Then, we apply the heuris-
tic described previously, that we proposed as the first
technique for noise reduction. We compute the lo-
cation at a certain moment by considering the RSSIs
associated with the past 10 measurements. The differ-
ence is that instead of employing the measured RSSI
values, we use the estimates. Given that calculations
are carried out on the server, further software-based
improvements can be integrated without affecting al-
ready deployed devices.
3.2.2 Using an Artificial Neural Network
In addition to the previous methods that employ di-
rect trilateration to obtain location, we also use an ar-
tificial neural network to predict the position of the
monitored person, starting from tuples of RSSI val-
ues. Such machine learning models have successfully
been employed in recent years for indoor positioning
(Zhanga et al., 2016; Lukito and Chrismanto, 2017;
Mittal et al., 2018). The network’s architecture is
not fixed, as a suitable architecture is dependant on
the problem space and specific data. Therefore, we
experimented with various architectures. Still, cer-
tain aspects are established: the input layer contains
three neurons, one for each RSSI measurement, cor-
responding to the three intelligent luminaires used in
our experiment. The output layer contains two out-
puts, representing the resulting indoor coordinates in
a two-dimensional space. We experimented with a
variable number of hidden layers and report the ob-
tained results. The used activation function for all
hidden layers is rectified linear unit (ReLU) (Nair and
Hinton, 2010). Optimisation is achieved via stochas-
tic gradient descent enhanced with the adam opti-
miser (Kingma and Ba, 2014). Training was per-
formed during a variable number of epochs and the
network is evaluated using k-fold cross validation.
4 EXPERIMENTS AND RESULTS
The experiments were carried out in a three-room
dwelling in which the system was installed. The room
dimensions are: 2.50m x 3.29m (bedroom), 2.50m x
1.00m (study room), 2.34m x 2.21m (hallway). The
apartment also includes a kitchen and a bathroom, but
these were not considered in the evaluation. Each
room was fitted with a ceiling-mounted smart node
connected to the software server over Wi-Fi. The
two-dimensional plan of the dwelling is represented
in Figure 2, in which the smart bulbs are illustrated
using yellow circles with black borders.
Both interior and exterior walls are made of brick
and cement. Exterior walls have a thickness of 35cm,
while the interior walls are 17cm thick. This is impor-
tant to note because these materials strongly influence
obtained RSSI values.
Formula 1 uses two parameters that need calibra-
tion: A - the signal strength at 1 meter from the lu-
minaire and n - the path loss exponent. The value
of A depends on the luminaire, and is computed once
for each type. In our case, we obtained a value of
A = −67. To obtain the most suitable value for n we
used a grid-search procedure and kept the value that
Indoor Localisation with Intelligent Luminaires for Home Monitoring
467
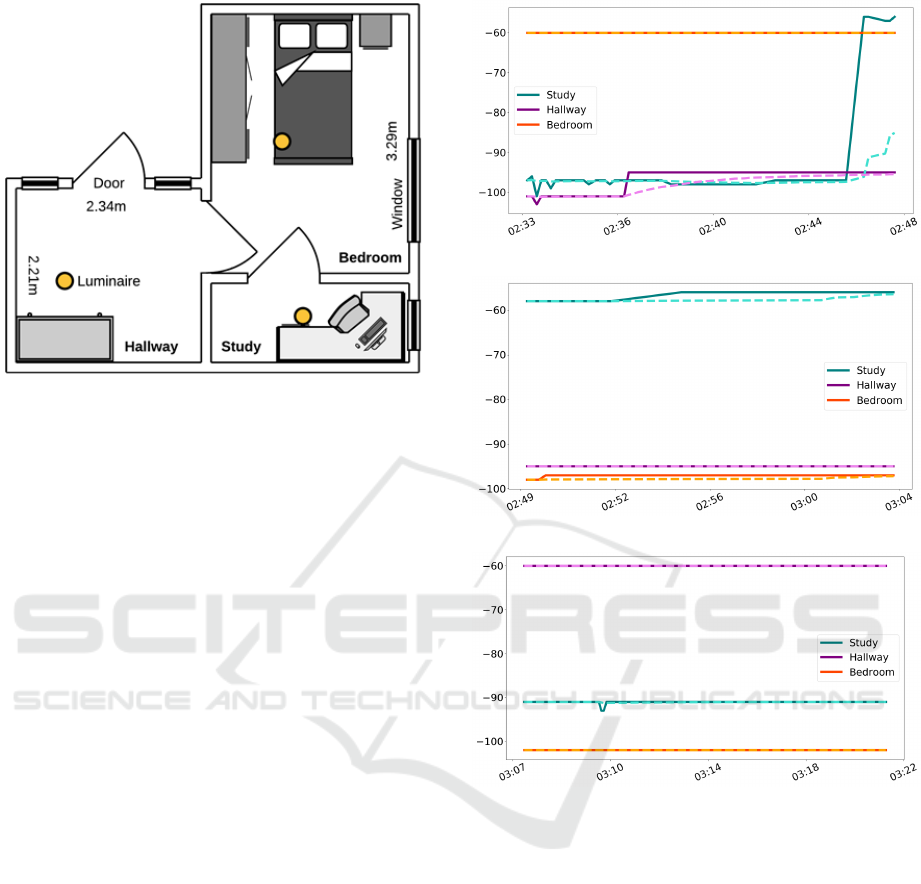
Figure 2: Plan of the dwelling used for experimentation
(icons from https://www.vecteezy.com).
lead to the most accurate results for the considered
indoor environment (n = 2.5). The result of the cal-
ibration step depends on deployment location, room
shapes and sizes, as well as wall placement and mate-
rials. Calibration must be undertaken once per loca-
tion, when the system is initially deployed.
The subsequent sections present the experiments
that were carried out to test and improve indoor lo-
calisation, starting from RSSI values. Mean squared
error (MSE) is the evaluation measure used and
it is computed considering the real indoor two-
dimensional coordinates as well as the coordinates
obtained by the positioning algorithms.
During the experiment the person is stationary in
the middle of each room for 15 minutes: bedroom
(02:33 - 02:48), study room (02:49 - 03:04) and hall-
way (03:07 - 03:22). Their mobile phone, which is
used for recording measurements, is kept on them.
RSSI value measurements are taken at an interval be-
tween 6 to 10 seconds. All doors between rooms are
open.
Figure 3 illustrates the RSSI values for all 3 inter-
vals of experimentation time, recorded by each of the
three intelligent bulbs. The Kalman estimates com-
puted starting from these RSSIs are also illustrated
using dashed lines. During the last 2 time periods (3b,
3c) we observe that the RSSIs do not suffer significant
changes. On the other hand, for the first time interval,
there seems to be more noise attenuated by Kalman
filtering.
Table 1 shows the MSE for the three considered
time periods, for each of the techniques. Original val-
ues refer to measured, unprocessed RSSI values. The
second row presents the results for the heuristic pro-
posed in Section 3.2: the values are calibrated accord-
(a) First interval - person is located in the bedroom.
(b) Second interval - person is located in the study room.
(c) Third interval - person is located in the hallway.
Figure 3: Recorded RSSIs (continuous lines) vs. Kalman
estimates (dashed lines) for each time interval, correspond-
ing to each location.
ing to the described technique and use the previous
10 measurements. The third row shows the obtained
results when a Kalman filter is applied and the loca-
tions are computed using the obtained estimates. The
bottom row presents the errors for the hybrid proce-
dure - the heuristic is applied on the estimates ob-
tained from running Kalman filters. It can be ob-
served that when using trilateration applied directly
on the original RSSIs the results are not as good as
with the other techniques. On average, the proposed
heuristic leads to the next better outputs, followed by
Kalman filters, which result in even smaller errors.
The hybrid combination described in Section 3.2 sur-
passes all previous ones. Another observation is that
the results for the first time interval accurately reflect
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
468
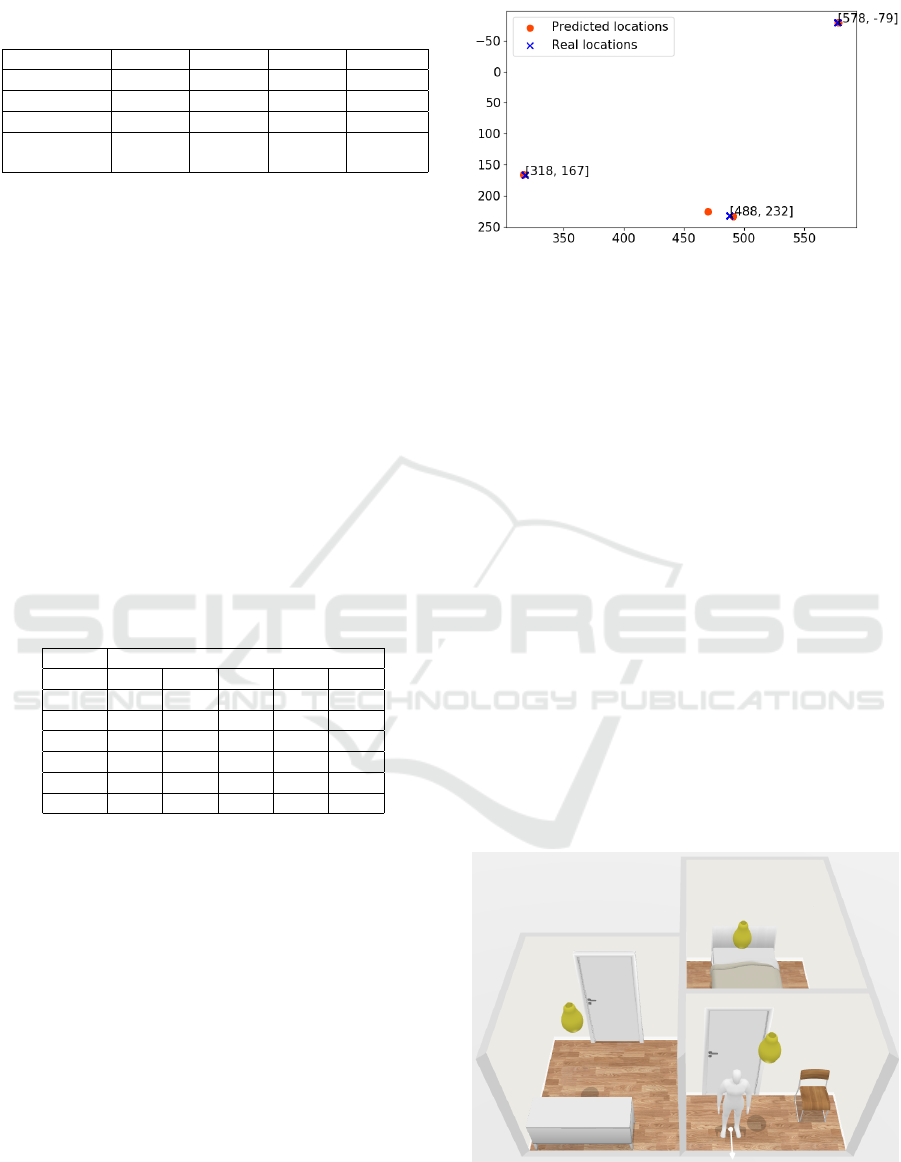
Table 1: Mean squared error using direct trilateration. Er-
rors reported in centimetres.
2:33-2:48 2:49-3:04 3:07-3:22 Avg. error
Original values 187.92 92.41 77.45 119.26
Heuristic 184.17 92.0377 77.69 117.97
Kalman filter 181.81 89.5987 77.50 116.30
Kalman filter +
178.11 88.87 77.47 114.81
heuristic
the higher noise reduction achieved using Kalman fil-
ters, as shown in Figure 3a. The difference in error
between the original values and Kalman filters (Table
1, column 2:33-2:48), first and third rows is signifi-
cantly higher than that corresponding to the other two
time periods.
The neural network described in Section 3.2 has
been applied on the raw RSSI inputs measured during
our experiment. These results are presented in Table
2. Note that generally the increase in the number of
training epochs leads towards smaller errors, however
this is not always the case, as over-fitting might arise.
The number of hidden layers also has an essential im-
pact on the network’s performance. Generally, while
our experiments show that the tendency of the output
error is to diminish as the number of epochs increases,
that was not always the case.
Table 2: Mean squared error obtained using the artificial
neural network. Errors reported in centimetres.
Number of hidden layers
Epochs 1 2 3 4 5
500 48.14 47.67 26.18 47.39 16.45
1000 34.54 14.53 12.80 6.25 16.41
1500 40.12 6.32 7.58 5.20 4.18
2000 44.57 13.53 4.12 2.22 4.07
2500 9.31 14.24 4.94 6.02 2.83
3000 27.90 14.50 17.01 3.83 3.13
The highest average error obtained by the net-
work (48.14 centimeters) is substantially lower than
the best results reported in Table 1. In the best case,
the network’s error is less than 3 centimetres and on
average it is less than 20 centimetres, for all under-
taken tests. The 95% confidence interval for all runs
is 16.87 ± 5.46 (centimetres). Thus, for the consid-
ered data, the network performs considerably better
when compared to trilateration-based methods. How-
ever, a disadvantage of the network is that it has to be
trained using a considerable amount of data collected
in various settings and from various positions in order
to be suitable for real-time localisation.
Figure 4 illustrates the positions obtained by
the best performing trained neural network. This
plot represents the two-dimensional floor plan of the
dwelling, as seen in Figure 2. For more context, we
mention that the left-most wall’s x coordinate is 167
(left wall of the hallway) and the entrance door’s y
Figure 4: Indoor positions obtained by the neural net-
work, represented in the two-dimensional floor plan of the
dwelling (Figure 2). The units of measure in this plot are
centimetres.
coordinate is 40; the measurements are in centime-
tres. For a certain location, many of the predicted po-
sitions are identical and thus, even though the number
of predictions is the same with the number of recorded
RSSI values, they are all superimposed in the image.
We notice that the accuracy is very high, particularly
for the first and the last periods of time (bedroom and
hallway). In the case of the study (second period
of time) the predicted locations are not all identical,
however the error is low and the predictions are very
close to reality.
The location of the person during the second time
interval is illustrated in Figure 5. The image is ex-
tracted from the cyber-physical system’s software ap-
plication, which allows displaying the computed in-
door locations of the monitored person in real-time,
both in a two- and and three-dimensional space. The
image illustrates the positions of the smart bulbs as
well as the person’s estimated location. This applica-
tion feature allows caregivers to supervise the moni-
tored person’s location in real time.
Figure 5: Illustration of the person’s indoor location within
the system’s interface.
Indoor Localisation with Intelligent Luminaires for Home Monitoring
469

5 COMPARISON WITH
RELATED WORK
We briefly compare relevant existing systems with
ours. The RADAR system (Bahl and Padmanabhan,
2000) determines the person’s current position by
considering the signal strength of its k nearest neigh-
bours. The signal is influenced by noise, building ma-
terials and other environment-dependant factors. The
localisation error was between 2 and 3 meters. For
the system where a neural network was used for de-
termining the location of a person based on wireless
LANs, the accuracy is of about 3 meters (Battiti et al.,
2002). For the localisation based on trilateration and
Kalman filters (Fariz et al., 2018), the error varied be-
tween 14.82 and 3.58 meters. The extended Kalman
filter for indoor localisation based on fusing Wi-Fi
(Deng et al., 2015) has a positioning error of 2.83
meters. Another paper targeting indoor positioning
(Li et al., 2018) reported a maximum positioning er-
ror of 3.29 meters when using direct trilateration with
Bluetooth and 1.61 meters when using a back propa-
gation neural network. As opposed to these reports,
our techniques lead to smaller errors for the consid-
ered experiment, having a maximum average error of
1.19 metres. However, a thorough comparison cannot
be undertaken given differences in experiment setup,
measurement devices and procedures.
Indoor localisation based on RSSI data gathered
via Wi-Fi was tested within two environments and
triggered lower positioning errors (Sadowski and Spa-
chos, 2018). The first environment was one big room
in which there were several BLE devices and multi-
ple Wi-Fi networks causing interference. The second
environment comprised a smaller room that only con-
tained furniture with no other devices present, lead-
ing to a low level of noise. Inside the first environ-
ment the average error for positioning was 0.84 me-
ters, while for the second environment it was 0.48
meters. The nodes which measured the RSSI values
have been placed on tables of the same height for lim-
iting the number of signal reflections. In our work,
the nodes were ceiling-mounted and three rooms were
considered, having eight Wi-Fi networks and seven
BLE connections causing interference. The phone
was placed at about 1 meter above the floor. The walls
made of brick and cement caused reflections and due
to the multiple path signal propagation, a higher than
desired positioning error was obtained. Transmission
signals are also blocked due to surrounding furniture
and equipment, as well as persons who move inside
the environment (Wang et al., 2012), including the
monitored person itself.
6 CONCLUSION
During the past decades there has been a dramatic in-
crease in the world’s older population and this trend is
expected to continue. Population ageing has a series
of major effects in various sectors such as housing, lo-
cal communities and healthcare. As a consequence, a
variety of technology-based solutions have emerged,
which aim to facilitate maintaining an independent
lifestyle for older adults within their communities and
to ensure their safety. This study presents the results
of our experiments regarding the indoor localisation
component of a cyber-physical system designed to aid
in monitoring older adults.
The system is built around a network of intel-
ligent luminaires equipped with embedded sensing
for environment monitoring, indoor localisation and
communication. The system measures received sig-
nal strength from nearby BLE devices and is able to
compute their indoor location with actionable accu-
racy. Two techniques were used for indoor position-
ing: one using direct trilateration and one based on
an artificial neural network. We proposed a heuristic
for more accurate localisation that also incorporates
a noise reduction technique. Our experiments show
that the neural network is superior to direct trilatera-
tion. With regard to trilateration, results indicate that
heuristics combined with Kalman filtering for noise
reduction lead to smaller localisation errors.
Compared to other indoor positioning systems that
require fingerprinting or additional wires or devices,
our system has a significant advantage: no complex
indoor measurements are needed. Furthermore, de-
ployment is straightforward, as existing bulbs can
be replaced by intelligent luminaires using the same
electrical infrastructure.
Future work will be carried out towards further
improving localisation accuracy. Further experimen-
tation will be performed within the same setup, with
both opened and closed doors and considering user
movement to augment static localisation results. As a
consequence of more tests, additional data will be col-
lected, which will also enable a more thorough train-
ing process for the artificial neural network and enable
other approaches.
ACKNOWLEDGEMENT
This work was supported by a grant of the Ro-
manian National Authority for Scientific Research
and Innovation, CCCDI UEFISCDI, project number
46E/2015, i-Light - A pervasive home monitoring sys-
tem based on intelligent luminaires.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
470

REFERENCES
Bahl, P. and Padmanabhan, V. N. (2000). Radar: An in-
building RF-based user location and tracking system.
In Proc. IEEE INFOCOM 2000, volume 2, pages
775–784.
Battiti, R., Thang Le, N., and Villani, A. (2002). Location-
aware computing: A neural network model for de-
termining location in wireless LANs. Int. Semicond.
Conf., 4.
Bocicor, M. I. et al. (2017). Cyber-physical system for as-
sisted living and home monitoring. In 13th IEEE In-
ternational Conference on Intelligent Computer Com-
munication and Processing, pages 487–493.
Bulten, W., Rossum, A. C. V., and Haselager, W. F. G.
(2016). Human slam, indoor localisation of devices
and users. In IEEE First International Conference on
Internet-of-Things Design and Implementation.
Deng, Z. A., Hu, Y., Yu, J., and Na, Z. (2015). Extended
kalman filter for real time indoor localization by fus-
ing wifi and smartphone inertial sensors. Microma-
chines, 6:523–543.
Dong, Q. and Dargie, W. (2012). Evaluation of the reliabil-
ity of RSSI for indoor localization. In Proceedings of
the IEEE International Conference on Wireless Com-
munications in Unusual and Confined Areas.
Fariz, N. et al. (2018). An improved indoor location tech-
nique using kalman filter. International Journal of En-
gineering & Technology, 7.
Haigh, P. A. et al. (2014). Visible light communications:
real time 10 mb/s link with a low bandwidth poly-
mer light-emitting diode. Optics express, 22(3):2830–
2838.
Kingma, D. P. and Ba, J. (2014). Adam: A method for
stochastic optimization. CoRR, abs/1412.6980.
Li, G. et al. (2018). Indoor positioning algorithm based on
the improved RSSI distance model. Sensors, 18(9).
Lukito, Y. and Chrismanto, A. R. (2017). Recurrent neu-
ral networks model for WiFi-based indoor positioning
system. In 2017 International Conference on Smart
Cities, Automation & Intelligent Computing Systems
(ICON-SONICS).
Luo, X., O’Brien, W. J., and Julien, C. (2011). Comparative
evaluation of received signal strength index (RSSI)-
based indoor localization techniques for construction
jobsites. Adv. Eng. Inform., 25:355–363.
Lymberopoulos, D. et al. (2015). A realistic evaluation and
comparison of indoor location technologies: Experi-
ences and lessons learned. In The 14th ACM/IEEE
Conference on Information Processing in Sensor Net-
works (IPSN ’15).
Maduskar, D. and Tapaswi, S. (2017). RSSI based adap-
tive indoor location tracker. Scientific Phone Apps and
Mobile Devices, 3.
Marin, I. et al. (2018). i-Light - Intelligent Luminaire Based
Platform for Home Monitoring and Assisted Living.
Electronics, 7(220).
Mittal, A., Tiku, S., and Pasricha, S. (2018). Adapting Con-
volutional Neural Networks for Indoor Localization
with Smart Mobile Devices. In Proceedings of the
2018 on Great Lakes Symposium on VLSI.
Nair, V. and Hinton, G. E. (2010). Rectified linear units im-
prove restricted boltzmann machines. In Proceedings
of the 27th International Conference on International
Conference on Machine Learning, ICML’10, pages
807–814, USA. Omnipress.
Ozsoy, K., Bozkurt, A., and Tekin, I. (2013). Indoor po-
sitioning based on global positioning system signals.
Microwave and Optical Technology Letters, 55:1091–
1097.
Pu, C. C., Pu, C.-H., and Lee, H.-J. (2011). Indoor location
tracking using received signal strength indicator. In
Emerging Communications for Wireless Sensor Net-
works.
Robesaat, J., Zhang, P., Abdelaal, M., and Theel, O. (2017).
An improved ble indoor localization with kalman-
based fusion: An experimental study. Sensors, 17.
Sadowski, S. and Spachos, P. (2018). RSSI-based indoor
localization with the internet of things. In IEEE Ac-
cess.
Sung, Y. (2016). RSSI-based distance estimation frame-
work using a kalman filter for sustainable indoorcom-
puting environments. Sustainability, 8.
Ta, V.-C. (2017). Smartphone-based indoor positioning
using Wi-Fi, inertial sensors and Bluetooth. https://
tel.archives-ouvertes.fr/tel-01883828/document. Ma-
chine Learning, Universit
´
e Grenoble Alpes.
Tarrio, P. et al. (2011). An energy-efficient strategy for
combined rss-pdr indoor localization. In IEEE In-
ternational Conference on Pervasive Computing and
Communications Workshops (PERCOM Workshops),
pages 619–624.
Tarzia, S. P. et al. (2011). Indoor localization without in-
frastructure using the acoustic background spectrum.
In Proceedings of the 9th international conference on
Mobile systems, applications, and services, page 155.
Wang, J.-Y. et al. (2012). High-precision RSSI-based in-
door localization using a transmission power adjust-
ment strategy for wireless sensor networks. In 2012
IEEE 14th International Conference on High Perfor-
mance Computing and Communication, 2012 IEEE
9th International Conference on Embedded Software
and Systems.
Welch, G. and Bishop, G. (1995). An introduction to the
kalman filter. Technical report, Department of Com-
puter Science, University of North Carolina at Chapel
Hill, Chapel Hill, NC, USA.
World Health Organization (2015). World report on age-
ing and health. http://apps.who.int/iris/bitstream/
10665/186463/1/9789240694811 eng.pdf?ua=1.
Xiao, J. and Zhou, Z. (2016). A survey on wireless indoor
localization from the device perspective. ACM Com-
puting Surveys, 49.
Zhanga, W., Liua, K., Zhang, W., Zhang, Y., and Gu, J.
(2016). Deep neural networks for wireless localiza-
tion in indoor and outdoor environments. Neurocom-
puting, 194:279–287.
Indoor Localisation with Intelligent Luminaires for Home Monitoring
471
