
DRAGON: A Dynamic Scheduling and Scaling Controller for Managing
Distributed Deep Learning Jobs in Kubernetes Cluster
Chan-Yi Lin, Ting-An Yeh and Jerry Chou
Computer Science Department, National Tsing Hua University, Computer Science Department,
Hsinchu Taiwan (R.O.C), Taiwan
Keywords:
Deep Learning, Resource Orchestration, Deep Learning, Job Scheduling, Autoscaling.
Abstract:
With the fast growing trend in deep learning driven AI services over the past decade, deep learning, espe-
cially the resource-intensive and time-consuming training jobs, have become one of the main workload in
today’s production clusters. However, due to the complex workload characteristics of deep learning, and the
dynamic natural of shared resource environment, managing the resource allocation and execution lifecycle of
distributed training jobs in cluster can be challenging. This work aims to address these issues by developing
and implementing a scheduling and scaling controller to dynamically manage distributed training jobs on a
Kubernetes (K8S) cluster, which is a broadly used platform for managing containerized workloads and ser-
vices. The objectives of our proposed approach is to enhance K8S with three capabilities: (1) Task dependency
aware gang scheduling to avoid idle resources. (2) Locality aware task placement to minimize communication
overhead. (3) Load aware job scaling to improve cost efficiency. Our approach is evaluated by real testbed and
simulator using a set of TensorFlow jobs. Comparing to the default K8S scheduler, our approach successfully
improved resource utilization by 20% ∼ 30% and reduced job elapsed time by over 65%.
1 INTRODUCTION
To obtain sufficient computing resources for training
a large scale deep learning model in a timely fash-
ion, one must rely on distributed training technique
on a parallel computing systems, like GPU cluster. A
distributed training job is consisted of multiple com-
puting tasks, and each task can utilize a computing
device to train a single model together. As shown
by a recent study (Goyal et al., 2017), a 50 layers
of ResNet model can be trained in 1 hour by using
256 GPUs. Hence, building and managing a resource
pool for distributed deep learning training is essential.
Furthermore, due to the expensive cost of these high
performance computing devices, such as GPU, the re-
source pool must be shared among users and multi-
plex between jobs in order to improve overall system
utilization and cost efficiency.
The parallel deep learning computing has been ex-
tensively studied (Krizhevsky, 2014; Li et al., 2014;
Zhang et al., 2016), and it has been implemented in
many machine learning computing frameworks, such
as TensorFlow (Abadi et al., 2016), PyTorch (Paszke
et al., 2017), CNTK (Yu et al., 2014). But these dis-
tributed training jobs are commonly managed like the
traditional parallel batch jobs or big data applications
by the cluster resource managers and job schedulers,
such as Kubernetes (Burns et al., 2016), YARN (Vav-
ilapalli et al., 2013), Mesos (Hindman et al., 2011),
and SLURM (Jette et al., 2002), where jobs can keep
holding on GPUs until their training complete, and
each task of a jobs is scheduled independently onto
the first available computer slot. As a result, a system
could suffer from significant performance degrada-
tion and low resource utilization due to the strong de-
pendency and heavy communication among the com-
puting tasks of a distributed training job. Optimiz-
ing the performance of distributed training jobs in
a shared or cloud resource environment is particu-
larly challenging because of the resource contention
between jobs in terms of GPU devices and network
bandwidth, etc. Therefore, this work aims to address
these issues by designing and implementing a con-
troller in Kubernetes to manage the resource alloca-
tion and life-cycle of distributed training jobs.
Kubernetes (K8S) is a open source platform for
managing containerized workloads and services. Its
main purpose is to orchestrate computing, network-
ing, and storage infrastructure on behalf of user work-
loads, and its container-centric management environ-
Lin, C., Yeh, T. and Chou, J.
DRAGON: A Dynamic Scheduling and Scaling Controller for Managing Distributed Deep Learning Jobs in Kubernetes Cluster.
DOI: 10.5220/0007707605690577
In Proceedings of the 9th International Conference on Cloud Computing and Services Science (CLOSER 2019), pages 569-577
ISBN: 978-989-758-365-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
569
ment enables portability and agility across infrastruc-
ture providers. It has been widely used in indus-
try production systems. Many deep learning service
platforms, including Kubeflow (Kubeflow, 2017),
RiseML (RiseML, 2017), Microsoft OpenPAI (Mi-
crosoft, 2016), IBM FfDL (IBM, 2018), are also built
on top of Kubernetes to help users deploy and launch
deep learning jobs on K8S with ease. However, as
shown by our study, the current deployment features
for distributed training jobs on K8S are at the task
level not at the job level. As a result, the existing
management functionality, like auto-scaling and load-
balancing, cannot be applied to distributed training
jobs, and the default K8S FIFO scheduler could cause
significant network overhead and even deadlock prob-
lem.
To address the aforementioned problems, we pro-
posed DRAGON, named after ”Deep LeaRning with
Auto-scale and GAng-schedule On KuberNetes”. It
is designed and implemented as an extended con-
troller component in K8S to provide the ability of
managing distributed training at job level. Therefore,
we were able to design more sophisticate scheduling
and scaling strategies based on job level or even sys-
tem level information for performance optimization.
Specifically, DRAGON enhances K8S with three ca-
pabilities: (1) Task dependency aware gang schedul-
ing to avoid idle resources. (2) Locality aware task
placement to minimize communication overhead. (3)
Load aware job scaling to improve cost efficiency. As
shown by our experiments in a small scaled 2 nodes
8 GPUs cluster, and a larger scaled 4 nodes 32 GPUs
simulator, compared to the default K8S manager, our
approach significantly improved resource utilization
and reduced job elapsed time.
The rest of paper is structured as follows. Sec-
tion 2 briefly introduce TensorFlow and Kubernetes as
the case study subjects in our work, and highlights the
problems of existing approaches. The design and im-
plement of our proposed solution, DRAGON, is de-
tailed in Section 3 followed by the experimental eval-
uations in Section 4. Finally Section 5 gives related
work, and Section 6 concludes the paper.
2 BACKGROUND
This work investigates the problems of distributed
training on shared and cloud resource environment
by studying and optimizing the performance of Ten-
sorFlow on Kubernetes. Hence, in this section, we
briefly introduce these two software tools and high-
light the potential problems and limitations of exist-
ing approaches.
worker
worker
worker
worker
Parameter Servers
߱
௧ାଵ
݂
(ݔ)
߱
௧ାଵ
= ߱
௧
+ ߟ ȉ ݂
(ݔ)
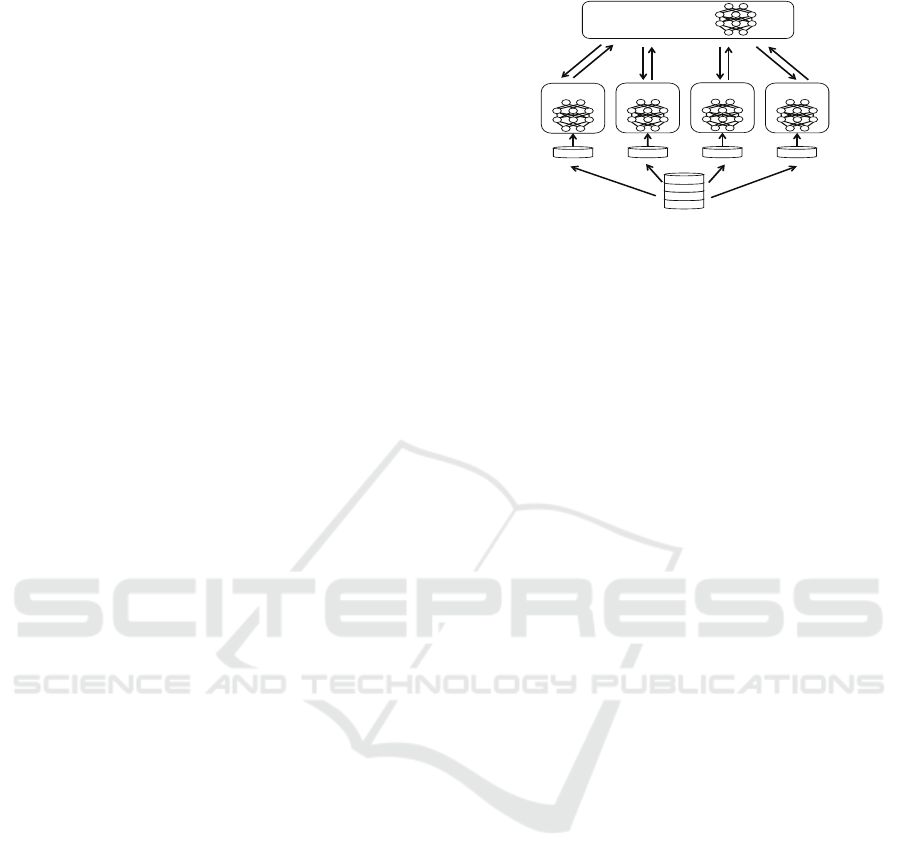
Figure 1: Data parallelism using parameter servers to ex-
change gradients.
2.1 TensorFlow: Distributed Training
Variant distributed computing techniques have been
proposed and implemented for deep learning. In this
work, we consider the parameter server strategy im-
plemented by TensorFlow (Abadi et al., 2016) as
a study case to investigate the performance of dis-
tributed training. We chose TensorFlow because it is
one of most popular computing frameworks for deep
learning. TensorFlow provides a set of high-level API
for users to build their neural network models. The
computation on the model is then translated into a
dataflow job executed and managed by TensorFlow
on any computing devices, including GPUs. Hence it
eases the efforts of users to develop and compute deep
learning models.
The parameter server implementation of Tensor-
Flow is shown in Figure 1. A distributed training job
is consisted of a set of tasks in two different roles.
One of the role is parameter server which stores the
global parameters of the model and send the current
values to each worker for parallel training. The other
one role is worker which use the values from param-
eter server to compute the gradients in each iteration.
At the end of each training iteration, workers send the
gradients to parameter servers for updating the global
parameters before the start of next iteration. The pa-
rameter update can be done asynchronously among
workers, so the workers can run independently to each
other throughout the whole training process and ob-
tain better scalability in large scale training.
The number of parameter servers and workers can
be controlled by users, and this setting plays a cru-
cial role to the performance of distributed training
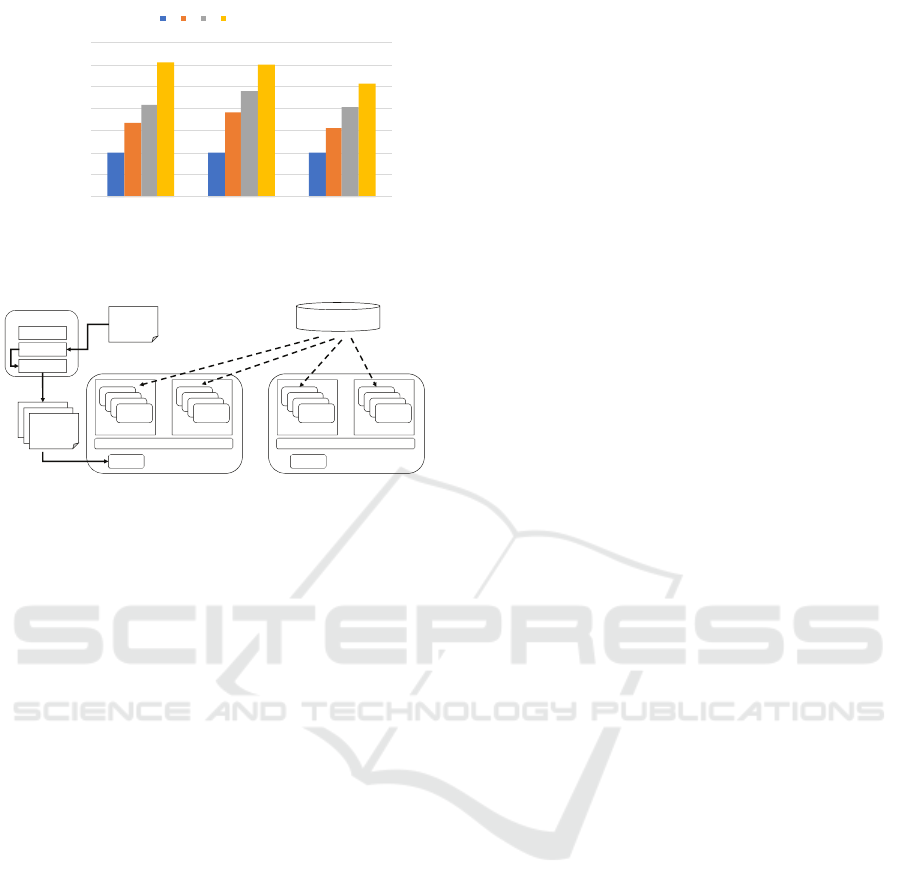
jobs. As shown by our experimental results in Fig-
ure 2, increasing the number of workers can acceler-
ate the training speed for all three image classification
models (InceptionV3, RestNet-50, and AlexNet) we
tested. But the speedup is not linear, and the scala-
bility of each model can be different from each other.
This is because the communication overhead between
CLOSER 2019 - 9th International Conference on Cloud Computing and Services Science
570
92.12
115.06
38.09
154.14
176.65
59.1
192.01
277.37
77.76
280.79
346.51
97.69
0
0.5
1
1.5
2
2.5
3
3.5
InceptionV3 ResNet-50 AlexNet
imgs/sec
(normalized to 1 worker)
1 2 3 4 workers
Figure 2: Scalability with images/sec throughput. Higher
values means higher performance.
<ϴ^
DĂƐƚĞƌ
^ĐŚĞĚƵůĞƌ
ŽŶƚƌŽůůĞƌ
EŽĚĞ
WK
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
WK
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
͙
͙
:Žď
ĞƐĐƌŝƉƚŝŽŶ
;zD>ĨŝůĞͿ
W/^ĞƌǀĞƌ
ŬƵďĞůĞƚ
WK
ĚĞƐĐƌŝƉƚŝŽŶ
;zD>ĨŝůĞͿ
WK
ĚĞƐĐƌŝƉƚŝŽŶ
;zD>ĨŝůĞͿ
WK
ĞƐĐƌŝƉƚŝŽŶ
;zD>ĨŝůĞͿ
ŽĐŬĞƌ,Ƶď
;/ŵĂŐĞZĞƉŽƐŝƚŽƌLJͿ
ŽŶƚĂŝŶĞƌƌƵŶƚŝŵĞ;ŽĐŬĞƌͿ
EŽĚĞ
WK
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
WK
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
ĐŽŶƚĂŝŶĞƌ
͙
ŬƵďĞůĞƚ
ŽŶƚĂŝŶĞƌƌƵŶƚŝŵĞ;ŽĐŬĞƌͿ
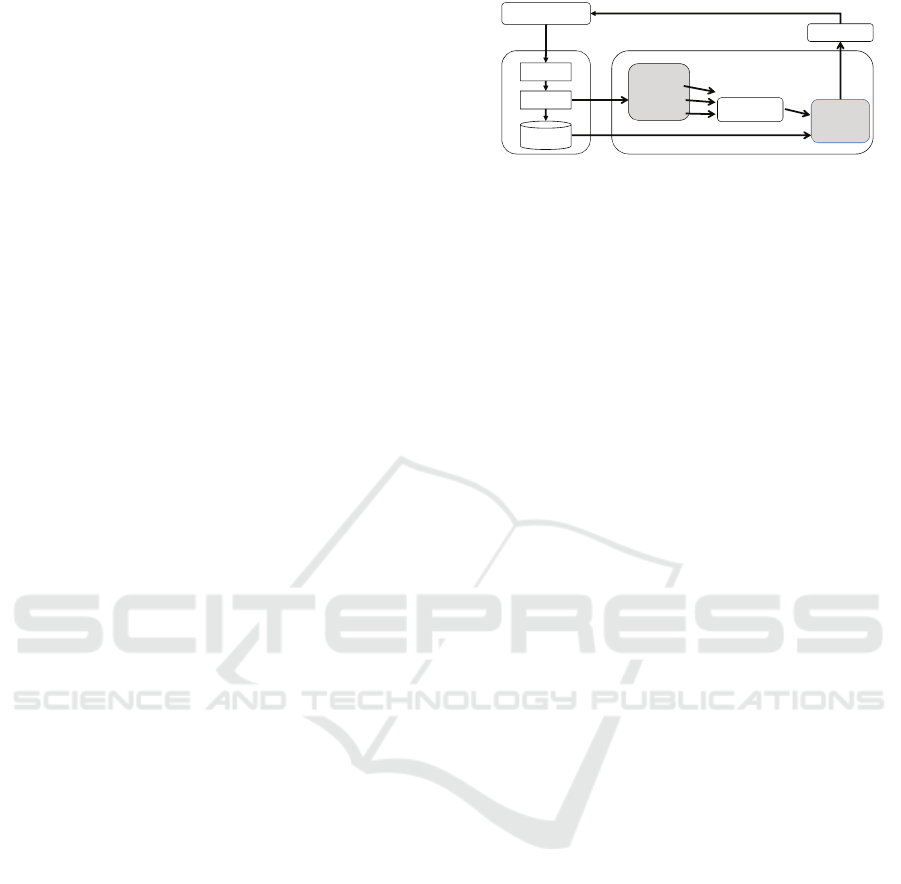
Figure 3: System architecture and components of K8S.
workers and parameter servers for exchanging the
gradients and weights of all the parameters after every
training iterations. Furthermore, all the processes of
workers and parameter servers must be launched be-
fore the training can be started by TensorFlow. As a
result, distributed training jobs tend have strong task
dependency and heavy communication traffic among
their tasks. So they should be scheduled as a unit and
avoided been placed across compute nodes by the re-
source managers.
2.2 Kubernetes: Cluster Manager
Kubernetes (K8S) is a open source platform for man-
aging containerized workloads and services on a
shared resource pool. It has been broadly used to
deploy software across infrastructure providers. The
system architecture of K8S is shown in Figure 3.
It consists of master nodes and worker nodes. The
master nodes host the management components of
K8S, and the worker nodes provide the computing
resources requested by user’s containers. The small-
est deployable units managed by K8S is called POD,
which is a set of tightly coupled containers with
shared network namespace and storage among them.
A POD can be replicated, recovered, and scheduled
by K8S according to its desired state as described by
users.
The API server provides the interface for users to
interact with K8S. One of the main functions is to let
users submit a job description file which contains all
the necessary information for deploying and manag-
ing the resources of a job throughout its life-cycle,
such as container images, resources requirements,
storage volume types and so on. The job description
file will be handled by a deployment controller, which
in turn generates the a description file for each of re-
quested PODs of the job. Then the scheduler is re-
sponsible for selecting the worker node for each POD.
The default K8S scheduler implements a FIFO queue,
and binds PODs to workers in a round-robin manner
with the aim of balancing the load among workers.
Once the POD requests is received by Kubelet, a node
agent on workers, it launches its assigned PODs when
there is sufficient residual capacity, and monitors their
status and resource usage during execution. Kuber-
netes is highly reconfigurable and extensible by al-
lowing cluster administrators to define new resource
object managed a customized resource controllers. As
detailed in Section 3.2, we defined our own resource
type for TensorFlow jobs, and implemented our cus-
tomized controller to optimize job management.
2.3 Challenges
Both TensorFlow and Kubernetes are powerful tools
that are broadly used in their respective worlds. But
together, there are a few critical problems that could
hamper the performance of distributed training in
cluster.
First, users must submit a deployment request for
each individual workers of a training job. Kube-
flow (Kubeflow, 2017) is a recent work that develop a
controller to simply the deployment process by gener-
ating all the deployment files for users automatically.
But it doesn’t provide any resource allocation opti-
mization or job life-cycle management ability com-
paring to our work.
Second, the default K8S scheduler is at POD level,
and it tends to spread PODs evenly across all the
nodes. But as described in Section 2.1, distributed
training jobs has strong dependency among its tasks.
So the jobs may suffer from significant communi-
cation overhead. Even worse, resources might be
wasted when a training task cannot start computing
before all its peer tasks are launched. Therefore, both
job performance and resource utilization can be suf-
fered when the scheduler is not aware the task depen-
dency of a job.
Last but not least, the existing solution provided
by K8S is called Horizontal Pod Autoscaler, which
controls the number of PODs for a deployment object
according to the CPU utilization of a POD in response
to the sudden surge of workload demands. But a sin-
gle distributed training job can be consisted of mul-
tiple PODs, and deep learning computations are of-
DRAGON: A Dynamic Scheduling and Scaling Controller for Managing Distributed Deep Learning Jobs in Kubernetes Cluster
571
ten communication not cmoputation intensive. There-
fore, new control policy must be designed for this al-
ternative objective.
3 DRAGON
3.1 Overview
To address the challenges discussed in Section 2.3,
we designed and implemented DRAGON, which is an
extended controller for managing distributed training
jobs on K8S. The key design principal of DRAGON
is to enhance job scheduling and scaling decisions by
utilizing job and system level information. Specifi-
cally, DRAGON is based on the following three man-
agement strategies for minimizing job execution time
and maximizing resource utilization. Detailed imple-
mentations and algorithms are given in Section 3.2
and Section 3.3, respectively.
Task Dependency Aware Gang Scheduling:
DRAGON is a job level scheduler. It schedules all the
tasks of a job as a single unit like a gang scheduler.
A job is only launched when the system has enough
residual capacity to run all its tasks simultaneously.
Thus, resources will not be occupied by idle tasks,
and deadlock among tasks can be avoided.
Locality Aware Task Placement: To minimize
the communication overhead of a job, DRAGON
tends to place all the tasks of a job on as fewer number
of compute nodes as possible. A more sophisticate
placement algorithm with considerations of network
topology and performance interference could also be
implemented in our controller. But we use a simple
greedy algorithm in this work to demonstrate the ca-
pability of our controller. Besides, those sophisticate
placement algorithms (Amaral et al., 2017) often re-
quired prior knowledge of the job execution time or
pre-built performance models which may not be avail-
able in practice.
Load Aware Job Scaling: Distributed training
are often long jobs with stable workload. But the
overall system loading can still varied over time as
jobs arrive and leave the system. Hence, DRAGON
tends to scale-up jobs when the system loading is low,
so that jobs can take advantage of the residual capac-
ity to reduce their execution time. On the other hand,
DRAGON tends to scale-down jobs when the system
loading is high, so that the resources can be reclaimed
from the running jobs to launch the waiting jobs as
soon as possible.
ŽŶƚƌŽůůĞƌ
ĐŽŶƚƌŽůůĞƌĐĂŶŚĂǀĞ
ŽŶĞƚŽŵƵůƚŝƉůĞ
ŝŶĨŽƌŵĞƌƐƚŽǁĂƚĐŚ
ƚŚĞƌĞƐŽƵƌĐĞĂŶĚ
ƐƚŽƌĞƚŚĞƐƚĂƚƵƐŝŶƚŚĞ
ůŽĐĂůĐĂĐŚĞ
/ĨƚŚĞƌĞŝƐĂŶLJĐŚĂŶŐĞ͕
ŝŶĨŽƌŵĞƌǁŝůůĐĂůůƚŚĞ
ĐĂůůďĂĐŬĂŶĚƉƵƚƚŚĞ
ŽďũĞĐƚŝŶƚŽ
ǁŽƌŬƋƵĞƵĞ
ĐŽŶƚƌŽůůĞƌůĂƵŶĐŚĞƐ
ŐŽƌŽƵƚŝŶĞƐ ƚŽƌƵŶ
ǁŽƌŬĞƌƐĂŶĚŚĂŶĚůĞƐ
ƚŚĞŝƚĞŵŝŶƚŚĞ
ǁŽƌŬƋƵĞƵĞ
hƐĞĐůŝĞŶƚƚŽĐĂůůW/
ƐĞƌǀĞƌĂŶĚĐŚĂŶŐĞƚŚĞ
ĚĞƐŝƌĞĚƐƚĂƚƵƐŽĨ
ŽďũĞĐƚƐ
W/^ĞƌǀĞƌ
ZĞĨůĞĐƚŽƌ
ĞůƚĂ&/&K
>ŽĐĂů
^ƚŽƌĞ
>ŝƐƚͬǁĂƚĐŚ
ZĞƐŽƵƌĐĞŽďũĞĐƚƐ
tƌŝƚĞ
/ŶĨŽƌŵĞƌ
ĂůůďĂĐŬƐ͗
KŶĚĚ
KŶhƉĚĂƚĞ
KŶĞůĞƚĞ
tŽƌŬƋƵĞƵĞ
tŽƌŬĞƌ
ZĞĂĚKŶůLJ KďũĞĐƚ/ŶĨŽ
ůŝĞŶƚƐ
ŽŶƚƌŽůůĞƌͲƐƉĞĐŝĨŝĐ
ŽŶƚƌŽůůĞƌ
ZĞĐŽŶĨŝŐƵƌĞƌĞƐŽƵƌĐĞĂůůŽĐĂƚŝŽŶ
Figure 4: The interaction between a custom controller and
K8S. The two gray boxes are the controller-specific compo-
nents that were re-implemented in our approach.
3.2 Implementation
Our implementation follows the operator pattern de-
fined by K8S. Operator pattern is a way to extend
K8S by combining a custom controller along with a
custom resource type which specifies the user-defined
objects that will be managed by the custom controller.
In our implementation, we defined distributed train-
ing job as a custom resource, and we implemented a
custom controller with the logic to make the schedul-
ing and scaling decisions for these training jobs. With
our custom resource, users can describe a distributed
training job in a single YAML file, and specify the
maximum and minimum number of workers allowed
for scaling the job. Hence our approach not only helps
users simplify the deployment process like Kubeflow,
but also gives users the ability to provide information
about how their jobs want to be controlled. For in-
stance, we can easily extend our scheduler to support
priority scheduling according to the job priority given
by users.
The interaction between a custom controller and
K8S is illustrated in Figure 4. Controller relies on an-
other component called informer to register and mon-
itor the events that trigger the controller. In our im-
plementation, we registered all three default setting
events (OnAdd, OnUpdata, OnDelete) for our cus-
tom resource. OnAdd and OnDelete event indicates
a distributed training job arrives or leaves the system.
OnUpdate means users manually changes the spec of
a job, such as number of workers, job name, etc.
When a registered event occurs on one of the cus-
tom resource object, informer adds this object into the
workqueue of the custom controller. Then the con-
troller creates a worker process to handle the event on
the object according to the control logic implemented
by the controller. In our work, we implemented the
algorithm described in next subsection. Finally, the
controller attempts to change the system state through
the command of API server. In our implementation,
we use the controller to do job scheduling and scaling
by generating new deployment files for the computing
tasks that need to be added or changed by our control
CLOSER 2019 - 9th International Conference on Cloud Computing and Services Science
572
d&:ŽďƐƌƌŝǀĞ
;KŶĚĚͿ
d&:ŽďƐĞƉĂƌƚƵƌĞ
;KŶĞůĞƚĞͿ
ĚĚũŽďƚŽƋƵĞƵĞ
;ϭͿ^ĐĂůĞͲĚŽǁŶĂůĂƌŵ͗
ŶLJƵƌŐĞŶƚũŽďǁŚŽƐĞ
ǁĂŝƚŝŶŐƚŝŵĞхƚŚƌĞƐŚŽůĚ;ʏͿ͍
;ϮͿ^ĐĂůĞͲĚŽǁŶƉŽůŝĐLJ͗
&ŝŶĚƐĐĂůĞͲĚŽǁŶ
ǀŝĐƚŝŵƐĨŽƌƌƵŶŶŝŶŐƚŚĞ
ƐŵĂůůĞƐƚƵƌŐĞŶƚũŽď
;ϯͿ:ŽďƐĐŚĞĚƵůŝŶŐƉŽůŝĐLJ͗
^ĞůĞĐƚĂũŽďďĂƐĞĚŽŶ&&^
ΘWĂĐŬŝƚƐƚĂƐŬƚŽƚŚĞůĞĂƐƚ
ŶƵŵďĞƌŽĨŶŽĚĞƐ
zĞƐ
EŽ
/ƐƚŚĞƌĞĞŶŽƵŐŚ
ƌĞƐŝĚƵĂůĐĂƉĂĐŝƚLJƚŽƌƵŶ
ƚŚĞƐŵĂůůĞƐƚƵƌŐĞŶƚũŽď͍
zĞƐ
EŽ
^ƵďŵŝƚŶĞǁĚĞƉůŽLJŵĞŶƚ
ĨŝůĞƐĨŽƌƚŚĞƵƌŐĞŶƚũŽď
ĂŶĚƚŚĞǀŝĐƚŝŵũŽďƐ
^ĐĂůĞͲĚŽǁŶƚŚĞ
ǀŝĐƚŝŵũŽďƐ
^ƵďŵŝƚŶĞǁ
ĚĞƉůŽLJŵĞŶƚĨŝůĞƐ
ĨŽƌƚŚĞƐĞůĞĐƚĞĚũŽď
ũŽďŝƐ
ƐĞůĞĐƚĞĚ
EŽũŽďŝƐ
ƐĞůĞĐƚĞĚ
;ϰͿ^ĐĂůĞͲƵƉĂůĂƌŵ͗
ŶLJŶŽĚĞǁŝƚŚƌĞƐŽƵƌĐĞƐǁŚŽƐĞ
ŝĚůĞƚŝŵĞхƚŚƌĞƐŚŽůĚ;ʅͿ͍
^ƵďŵŝƚŶĞǁ
ĚĞƉůŽLJŵĞŶƚĨŝůĞƐĨŽƌ
ƚŚĞƐĐĂůĞͲƵƉũŽďƐ
EŽ
ŶĚŽĨĐŽŶƚƌŽůůŽŽƉ
dƌLJƚŽƐĐŚĞĚƵůĞ
ƚŚĞŶĞdžƚũŽď
;ϱͿ^ĐĂůĞͲƵƉƉŽůŝĐLJ͗
&ŝŶĚƐĐĂůŝŶŐũŽďƐƚŽ
ƵƚŝůŝnjĞŝĚůĞƌĞƐŽƵƌĐĞƐ
EŽƐĐĂůĞͲĚŽǁŶ
ƉůĂŶĐĂŶďĞĨŽƵŶĚ
ůŝƐƚŽĨ
ƐĐĂůĞͲĚŽǁŶ
ũŽďƐ
zĞƐ
ůŝƐƚŽĨ
ƐĐĂůĞͲƵƉũŽďƐ
EŽũŽďŝƐ
ƐĞůĞĐƚĞĚ
^ĐĂůĞͲĚŽǁŶ
ĂůĂƌŵΘƉŽůŝĐLJ
^ĐĂůĞͲƵƉ
ĂůĂƌŵΘƉŽůŝĐLJ
^ĐŚĞĚƵůŝŶŐ
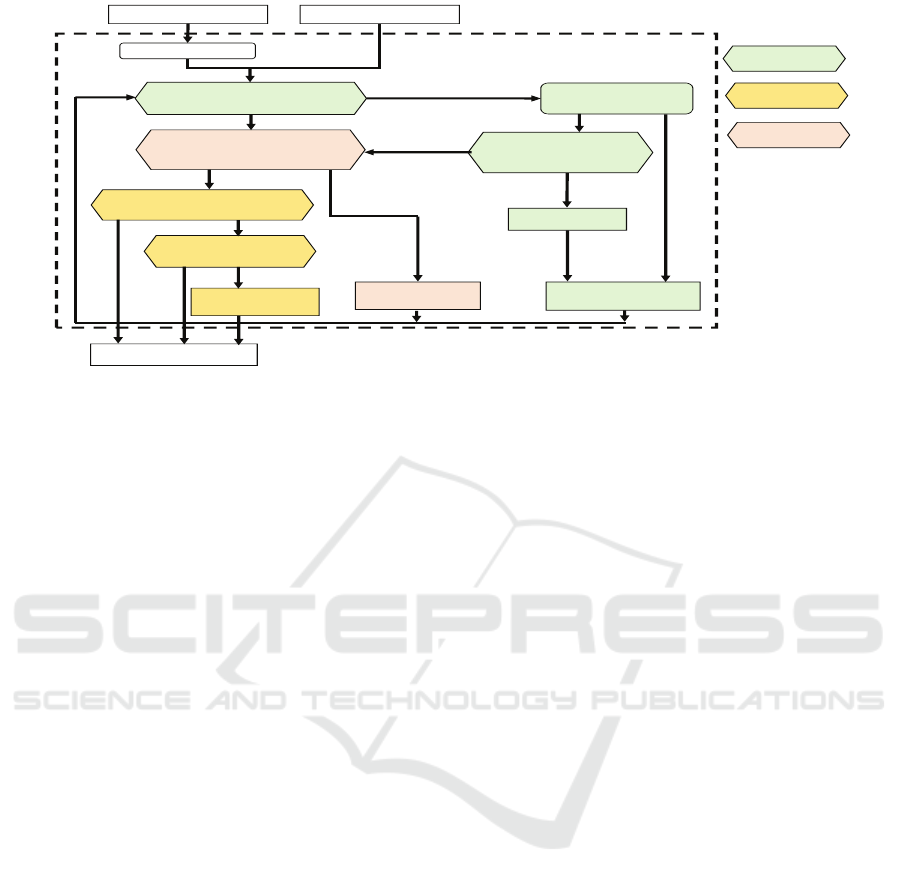
Figure 5: The control flow and policy of DRAGON.
decision.
To enable job level gang scheduling, our controller
maintains an internal job queue, and keeps track of
current system resource usage. When a job is allowed
to be launched, the controller generates deployment
requests for each of its computing tasks at once; oth-
erwise, the job simply waits in the queue. Noted, our
controller must co-exist with the default K8S sched-
uler, thus it uses the node selector label in the deploy-
ment description file to force K8S scheduler to place
computing tasks (i.e., PODs) onto the assigned node
locations.
3.3 Algorithm
Here, we introduce our proposed control algorithm
that achieves the three design goals mentioned in Sec-
tion 3.1 under the K8S architecture described in Sec-
tion 3.2. The overall control flow of our algorithm is
shown in Figure 5. The algorithm is consisted of three
procedures as follows, and it is called by the controller
whenever distributed training jobs arrive or depart in
the system.
First, a scale-down procedure that aims to launch
urgent jobs in the waiting queue immediately by re-
leasing resources from current running jobs. We de-
fine a job is urgent when its queuing wait time exceeds
a pre-defined threshold value. We tend to schedule
the smallest job with the least amount of resource re-
quirements from the urgent first. If we cannot release
enough resources for the smallest job, then the larger
urgent jobs certainly cannot be launched as well. Cur-
rent implementation selects the scale-down victim
jobs as the ones with the most surplus resources. Both
the scale-down alarm and policy can be re-designed
under our control flow for extension.
After the scale-down procedure for urgent jobs,
the controller then starts scheduling the rest of wait-
ing jobs with the residual capacity. We implemented
an adapted first come first served (AFCFS) schedul-
ing algorithm, which simply selects the first arrival
job in the queue whose required resource capacity is
less than then residual capacity. To preserve job local-
ity and minimize communication overhead, we pack
the tasks of a job onto the least number of compute
nodes. This locality aware scheduling algorithm can
also be extended with the information provided by the
systems or users, such as the network topology, per-
formance interference model, job priority, etc.
Finally, when no job in the queue can be sched-
uled, the controller tries to further utilize the leftover
resource capacity through the scale-up procedure for
maximizing resource utilization and minimizing job
execution time. However, we also want to prevent
jobs suffer from network overhead and reserve some
resources for the future arrival jobs. Therefore, the
scale-up alarm is only triggered when a resource (i.e.,
GPU) is idle over a time threshold, and the idle re-
source can only be allocated to a job that already ran
on the same node to maintain job locality.
4 EVALUATIONS
4.1 Experimental Environment
We evaluated our implementation by running real
TensorFlow workload on a small scale GPU cluster
with 2 GPU nodes connected by 1Gb Ethernet ca-
bles. Each node has 4 Nivida P100 GPUs, 16 Intel
2.1GHz CPU cores, and 64GB memory. As sum-
DRAGON: A Dynamic Scheduling and Scaling Controller for Managing Distributed Deep Learning Jobs in Kubernetes Cluster
573
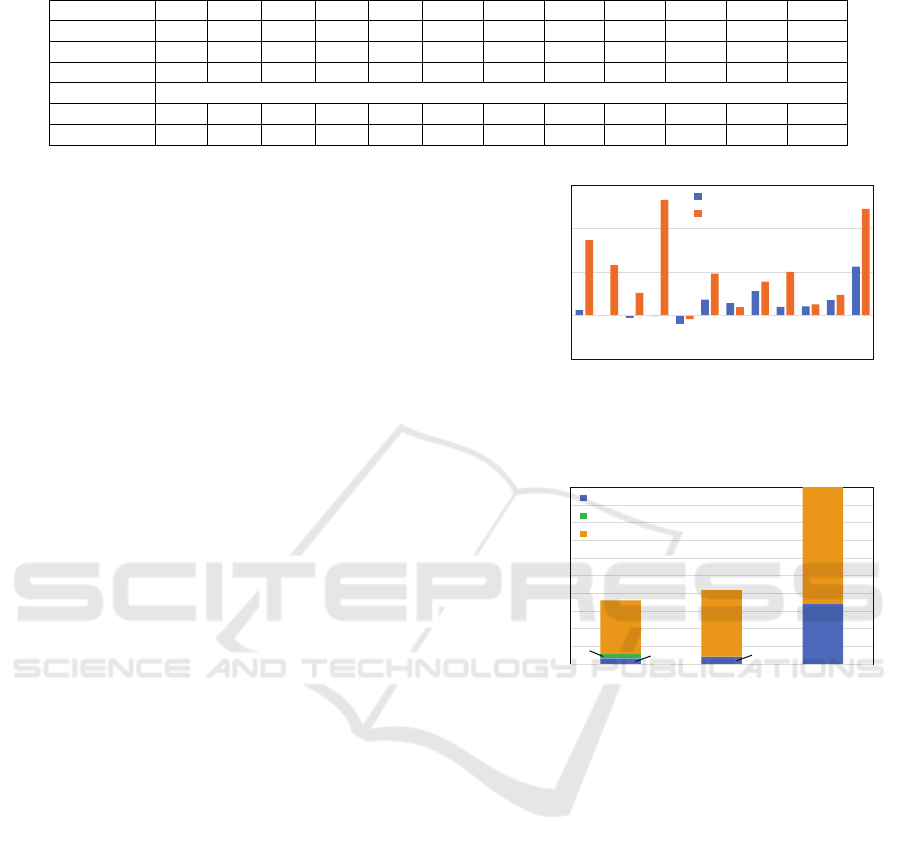
Table 1: Configuration of the jobs. A=AlexNet, I=InceptionV3, R=ResNet50.
Config. Job1 Job2 Job3 Job4 Job5 Job6 Job7 Job8 Job9 Job10 Job11 Job12
Models R I I A R A I R I A I A
Num. Workers 4 4 2 2 3 2 2 1 2 2 1 1
Min. Workers 2 2 2 2 2 2 2 1 2 2 1 1
Max. Workers 4
Steps 2800 3600 1000 450 2100 1000 2000 2400 2500 800 1000 1200
Arrival Time 0 0.56s 2.53s 6.34s 7.58s 13.11s 19.01s 27.54s 34.56s 42.58s 47.58s 51.19s
marized in Table 1, the test workload is consisted of
12 distributed TensorFlow jobs that train 3 common-
seen image classification models (AlexNet, Incep-
tionV3, ResNet-50) with variant settings in scaling
range, training steps, and arrival time. To observe the
behavior of our controller under various system load-
ing, the first 5 jobs was generated with a much shorter
inter-arrival time than the rest of jobs. The results are
presented in Section 4.2.
To further validate the robustness of our approach,
we implemented a simulator to evaluate our control
algorithm in a larger scale testbed with 4 compute
nodes, each has 8 GPUs. The test workload contains
100 randomly generated jobs with Poisson inter-arival
times. The mean inter-arrival time is adjust from 62
seconds to 400 seconds to simulate the workload of
various loading. The scalability of the jobs is mod-
eled based on our execution time observations from
the 3 real NN models used in the real experiments.
Each job has its own setting for the maximum, min-
imum and initial number of workers, and the values
were randomly selected between 2 to 8 GPUs. The
simulation results are presented in Section 4.3.
Throughout all the experiments, we compare our
approach, DRAGON, with two other existing schedul-
ing approaches. One is to deploy a distributed train-
ing jobs using the Kubeflow toolkit and let the tasks
scheduled by the default K8S scheduler. We use the
name Kubeflow to refer this approach in the rest of
this section. The other approach is named locality-
aware scheduler, which is a simplified implementa-
tion of DRAGON without the feature of auto-scaling.
So this approach also acts the same as a greedy pack-
ing scheduling algorithm that only tends to launch all
the tasks of a job on a single node.
4.2 Real Testbed Results
The job running time comparison can be seen in Fig-
ure 6. The time of each job is normalized to its results
from DRAGON, and noted the y-axis is in log
2
scale.
In general, DRAGON and locality-aware scheduler
have similar job running time for the first 5 jobs when
the system loading is relatively high. But the running
time of job6 ∼ job12 were reduced by DRAGON be-
0.5
1.0
2.0
4.0
8.0
1 2 3 4 5 6 7 8 9 10 11 12
job running time normalized by
DRAGON (in log2 scale)
job ID
Locality-aware scheduler
Kubeflow
Figure 6: The running time of each job normalized to the
results of DRAGON.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
DRAGON Locality-aware
scheduler
Kubeflow
average job elapsed time
(normalized to Kubeflow)
waiting
scaling
running
0.66
0.34
0.38
0.04
0.03
0.02
0.30
Figure 7: The comparison of the average job elapsed time.
The elapsed time is consist of the time for running, waiting
and scaling.
cause of the effect of scale-up strategy under low sys-
tem loading. The job running time of Kubeflow is
higher than DRAGON across the board by a factor of
1.2 to 6.3 due to communication overhead.
Figure 7 compares the average job elapsed time
which includes the time for running, waiting and scal-
ing. The elapsed time of Kubeflow is significantly re-
duced by Kubeflow and DRAGON by 60% and 65%,
respectively. As shown in the plot, this time reduction
comes from both running time and waiting time. The
running time is reduced because the network commu-
nication time is minimized by the job locality aware-
ness of both locality-aware scheduler and DRAGON.
On the other hand, the waiting time is reduced be-
cause of the reduction in job running time allows re-
sources to be released sooner, so waiting jobs can be
launched earlier as well. In our experiment, more than
half of jobs were launched immediately by locality-
aware scheduler and DRAGON.
CLOSER 2019 - 9th International Conference on Cloud Computing and Services Science
574
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 20 40 60 80 100 120
resource utilization
time (minutes)
DRAGON
Kubeflow
Locality-aware scheduler
Figure 8: Resource utilization over time.
Because of the ability of job scaling, Figure 7
shows that DRAGON has better results than locality-
aware scheduler in terms of running time, waiting
time and elapsed time. However, scaling job at run-
time does cause some overhead to DRAGON because
we had to checkpoint and restart the whole job in or-
der to adjust its number of workers. As observed from
our real experiment, restarting a job took about 40
seconds to 1 minute. This overhead is still accept-
able when the average job running time is long, and
the workload variation is not high enough to cause
frequent job scaling actions. But, we do think the
scaling overhead shoulf be considered and minimized
when dynamic resource management approaches are
applied, so it will be an important direction of our fu-
ture work.
Finally, Figure 8 shows the resource utilization
over time. Locality-aware scheduler has the lowest
resource utilization because it cannot utilize residual
capacity unless new job arrives. Kubeflow almost
fully utilizes the resources for the first hour because
jobs ran much longer and consumes more resources
due to communication overhead. But that also causes
long job waiting time as shown in Figure 7. Then the
utilization of Kubeflow drops extremely low for the
next hour because only one job left to run on a single
GPU. Hence, the utilization of Kubeflow also can be
highly influenced by the system loading. In contrary,
DRAGON not only has the shortest job completion
time, it is also able to consistently maintain a high
resource utilization regardless the variation of system
loading. In average, the utilization of DRAGON is
79%, while the utilization of locality-aware sched-
uler and Kubeflow are 45% and 57%, respectively.
So DRAGON achieved higher job execution perfor-
mance and better resource utilization at the same time.
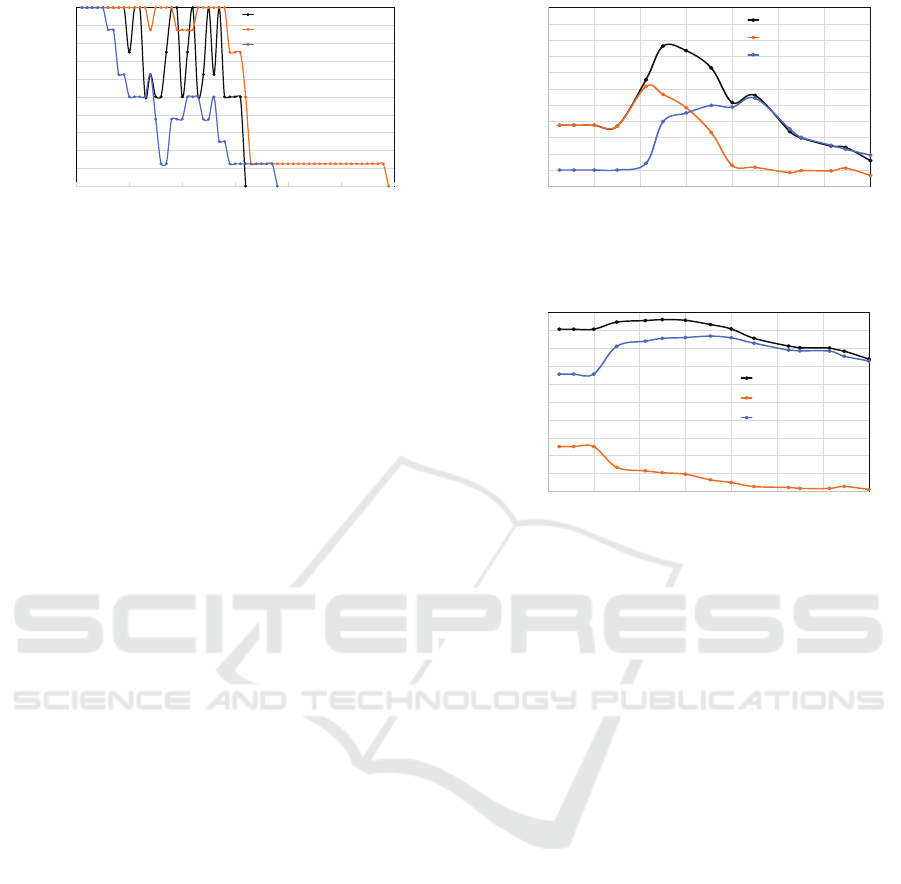
4.3 Large scale Simulation Results
We use simulator to validate the robustness of our
control algorithm under various system workload in-
tensity. Figure 9 and Figure 10 show the amount of
-10
0
10
20
30
40
50
60
70
80
90
100
0.5 1 1.5 2 2.5 3 3.5 4
time reduction (%)
workload intensity
elapsed time
running time
waiting time
Figure 9: The reduced elapsed time of locality-aware sched-
uler by DRAGON.
0
10
20
30
40
50
60
70
80
90
100
0.5 1 1.5 2 2.5 3 3.5 4
time reduction (%)
workload intensity
elapsed time
running time
waiting time
Figure 10: The reduced elapsed time of Kubeflow by
DRAGON.
time that can be reduced by DRAGON over locality-
aware scheduler and Kubeflow, respectively. Clearly,
DRAGON was able to reduce the average job elapsed
time across a wide range of workload intensity. To
analyze the results more deeply, we can also observe
that DRAGON has more opportunity to reduce job
waiting time under higher system loading by scal-
ing down jobs. However, if the system loading is too
high, all three scheduling algorithms suffer long wait-
ing time, so the reduction ratio becomes more lim-
ited. Also, the job running time could be increased
by DRAGON when jobs are scaled down like a few
occasions shown in Figure 9 when the workload in-
tensity is higher than 3. But even under high system
load, scale-up strategy could still be triggered to uti-
lize some fragmented resources that cannot be used to
launch new jobs.
On the other hand, when system is less loaded,
DRAGON scales up jobs to utilize the residual capac-
ity for reducing job running time. But if the load-
ing is low, the jobs will be bounded by the maximum
worker setting and even DRAGON cannot utilize all
the resources. Therefore, the running time reduction
also become less in Figure 9 when the workload inten-
sity is lower than 1.5. By combining the time reduc-
tion gains from both running time and waiting time,
DRAGON has the ability to reduce the overall elapsed
time under any system loading circumstances.
DRAGON: A Dynamic Scheduling and Scaling Controller for Managing Distributed Deep Learning Jobs in Kubernetes Cluster
575

5 RELATED WORK
Over the past decade, great effort has been made
from research community to address the scalability
and performance problem of distributed deep learn-
ing algorithms. Both data parallelism and model par-
allelism have been extensively studied (Krizhevsky,
2014). For model parallelism, many model parti-
tion and device placement strategies have been pro-
posed (Mirhoseini et al., 2017; Mayer et al., 2017).
For data parallelism, variant stochastic gradient de-
scent (SGD) algorithms have been developed to re-
duce communication and synchronization overhead,
such as asynchronous SGD (Dean et al., 2012; Zhang
et al., 2016), low-precision SGD (De Sa et al., 2017)
and lock-free SGD (Niu et al., 2011). Decentral-
ized Parameter server (Li et al., 2014), ring allre-
duce (Sergeev and Balso, 2018) are the two com-
munication method that have been broadly used for
exchanging parameters. Finally, many training skills
have been discussed for large scale training, including
learning rate, mini-batch size, and the ratio between
parameters and workers, etc. For instance, greater
mini-batch size is needed to speedup large scale train-
ing, but unusually large minibatch size can affect
learning accuracy. So (Goyal et al., 2017) proposed
a warmup scheme by using less aggressive learning
rates at the start of training, and used the LARS (You
et al., 2017) algorithm to assign a separate learning
rate for each layer instead of each weight. The grow-
ing development of these techniques show the need of
distributed training, and the importance of managing
these distributed training jobs.
Not until recently, people start pay attention to
the problem of managing distributed training jobs
on parallel systems and shared resource environment.
(Amaral et al., 2017) discusses the importance of con-
sidering the underline network topology for optimiz-
ing communication overhead. It proposed a topology-
aware task mapping scheduling algorithm by consid-
ering three performance cost: tasks communication,
external resource interference, and resource fragmen-
tation. Gandiva (Xiao et al., 2018) optimizes the re-
source usage for deep learning training by two tech-
niques. One is to dynamically prioritize or kill a sub-
set of jobs according to the early feedback on train-
ing accuracy. The other is to time-slice GPUs effi-
ciently across multiple jobs by predicting training per-
formance. Similar to Gandiva, Optimus (Peng et al.,
2018) also attempts to minimize job training time
based on online resource-performance models. Pro-
teus (Harlap et al., 2017) proposed to the strategy of
placing parameter servers and workers on cloud spot
instance for cost saving. OASiS (Bao et al., 2018)
is a online job scheduling algorithm that computes
the best job execution schedule upon the arrival of
each job, based on projected resource availability in
the future course and potential job utility to achieve.
Last but ot least, (Jeon et al., 2018) studies the effect
of gang scheduling, multi-tenant GPU sharing, and
failures during the execution of training workload on
GPU cluster. Same as our work, these studies are mo-
tivated by the opportunities and challenges of man-
aging deep learning training dynamically in a shared
resource environment. But different from us, these
studies aim to propose more sophisticate scheduling
and scaling algorithms based on performance predic-
tion models and domain-specific knowledge of deep
learning, while we focus more on providing a control
mechanism and software architecture to enable dy-
namic resource management on Kubernetes. There-
fore, these studies are complementary to our work,
and many of these algorithms can be implemented
into our control system.
6 CONCLUSIONS
The demand of distributed deep learning training is
growing rapidly in recent years. But deep learning
training is a resource-intensive and time-consuming
workload that needs to be carefully and dynamically
managed in a shared resource environment. In this
work, we investigate these performance issues by run-
ning distributed TensorFlow training jobs on a K8S
cluster, and address the problems by implementing
DRAGON, a K8S controller for dynamic schedul-
ing and scaling jobs according to system loading.
DRAGON enhances K8S with three capabilities: (1)
Task dependency aware gang scheduling to avoid idle
resources. (2) Locality aware task placement to min-
imize communication overhead. (3) Load aware job
scaling to improve cost efficiency. The evaluation of
our approach was conducted on both real testbed and
simulator. Comparing to the default K8S scheduler,
DRAGON significantly improved resource utilization
by 20% ∼ 30% and reduced job elapsed time by over
65% to deliver higher system performance and lower
computation cost for distributed training. The design
of our controller also allows us to explore the im-
plementations of more sophisticate dynamic resource
management strategies in the future. The complete
source code of our implementation can be download
at (Chan-Yi Lin, 2019).
CLOSER 2019 - 9th International Conference on Cloud Computing and Services Science
576

REFERENCES
Abadi, M. et al. (2016). Tensorflow: A system for large-
scale machine learning. In Proceedings of the 12th
USENIX Conference on OSDI, pages 265–283.
Amaral, M., Polo, J., Carrera, D., Seelam, S. R., and Stein-
der, M. (2017). Topology-aware GPU scheduling for
learning workloads in cloud environments. In Pro-
ceedings of the SuperComputing (SC), pages 17:1–
17:12.
Bao, Y., Peng, Y., Wu, C., and Li, Z. (2018). Online job
scheduling in distributed machine learning clusters.
CoRR, abs/1801.00936.
Burns, B., Grant, B., Oppenheimer, D., Brewer, E., and
Wilkes, J. (2016). Borg, omega, and kubernetes. ACM
Queue, 14:70–93.
Chan-Yi Lin (2019). DRAGON: Deep Learning
with Auto-scale and Gang-schedule On Kubernetes.
https://github.com/ChanYiLin/tf-operator-Dragon/.
De Sa, C., Feldman, M., R
´
e, C., and Olukotun, K.
(2017). Understanding and optimizing asynchronous
low-precision stochastic gradient descent. In Proceed-
ings of the 44th Annual ISCA, pages 561–574.
Dean, J. et al. (2012). Large scale distributed deep net-
works. In Proceedings of the 25th International Con-
ference on Neural Information Processing Systems,
pages 1223–1231.
Goyal, P., Dollar, P., Girshick, R., Noordhuis, P.,
Wesolowski, L., Kyrola, A., Tulloch, A., Jia, Y., and
He, K. (2017). Accurate, Large Minibatch SGD:
Training ImageNet in 1 Hour. In arXiv preprint
arXiv:1706.02677.
Harlap, A., Tumanov, A., Chung, A., Ganger, G. R., and
Gibbons, P. B. (2017). Proteus: agile ML elastic-
ity through tiered reliability in dynamic resource mar-
kets. In Proceedings of the Twelfth EuroSys, pages
589–604.
Hindman, B., Konwinski, A., Zaharia, M., Ghodsi, A.,
Joseph, A. D., Katz, R., Shenker, S., and Stoica, I.
(2011). Mesos: A Platform for Fine-grained Resource
Sharing in the Data Center. In Proceedings of the 8th
USENIX Conference on NSDI, pages 295–308.
IBM (2018). Fabric for deep learning (ffdl).
https://github.com/IBM/FfDL.
Jeon, M., Venkataraman, S., Phanishayee, A., Qian, J.,
Xiao, W., and Yang, F. (2018). Multi-tenant GPU
Clusters for Deep Learning Workloads: Analysis and
Implications. Microsoft Research Technical Report.
Jette, M. A., Yoo, A. B., and Grondona, M. (2002). Slurm:
Simple linux utility for resource management. In In
Proceedings of Job Scheduling Strategies for Parallel
Processing, pages 44–60. Springer-Verlag.
Krizhevsky, A. (2014). One weird trick for parallelizing
convolutional neural networks. CoRR, abs/1404.5997.
Kubeflow (2017). The machine learning toolkit for kuber-
netes. https://www.kubeflow.org/.
Li, M. et al. (2014). Scaling distributed machine learning
with the parameter server. In Proceedings of the 11th
USENIX Conference on OSDI, pages 583–598.
Mayer, R., Mayer, C., and Laich, L. (2017). The tensorflow
partitioning and scheduling problem: It’s the critical
path! In Proceedings of Workshop on Distributed In-
frastructures for Deep Learning, pages 1–6.
Microsoft (2016). Open platform for ai(openpai).
https://github.com/Microsoft/pai.
Mirhoseini, A., Pham, H., Le, Q. V., Steiner, B., Larsen,
R., Zhou, Y., Kumar, N., Norouzi, M., Bengio, S., and
Dean, J. (2017). Device placement optimization with
reinforcement learning. CoRR, abs/1706.04972.
Niu, F., Recht, B., Re, C., and Wright, S. J. (2011). Hog-
wild!: A lock-free approach to parallelizing stochastic
gradient descent. In Proceedings of the 24th Interna-
tional Conference on Neural Information Processing
Systems, pages 693–701.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in pytorch.
Peng, Y., Bao, Y., Chen, Y., Wu, C., and Guo, C. (2018).
Optimus: an efficient dynamic resource scheduler for
deep learning clusters. In Proceedings of the Thir-
teenth EuroSys Conference, pages 3:1–3:14.
RiseML (2017). Machine learning platform for kubernetes.
https://riseml.com/.
Sergeev, A. and Balso, M. D. (2018). Horovod: fast and
easy distributed deep learning in tensorflow. CoRR,
abs/1802.05799.
Vavilapalli et al. (2013). Apache Hadoop YARN: Yet An-
other Resource Negotiator. In Proceedings of the 4th
Annual Symposium on Cloud Computing, pages 5:1–
5:16.
Xiao, W., Bhardwaj, R., Ramjee, R., Sivathanu, M., Kwatra,
N., Han, Z., Patel, P., Peng, X., Zhao, H., Zhang, Q.,
Yang, F., and Zhou, L. (2018). Gandiva: Introspec-
tive Cluster Scheduling for Deep Learning. In 13th
USENIX OSDI, pages 595–610.
You, Y., Gitman, I., and Ginsburg, B. (2017). Scaling
SGD batch size to 32k for imagenet training. CoRR,
abs/1708.03888.
Yu, D. et al. (2014). An introduction to computational net-
works and the computational network toolkit. Mi-
crosoft Technical Report.
Zhang, W., Gupta, S., Lian, X., and Liu, J. (2016).
Staleness-aware async-SGD for Distributed Deep
Learning. In Proceedings of the Twenty-Fifth Interna-
tional Joint Conference on Artificial Intelligence, IJ-
CAI’16, pages 2350–2356.
DRAGON: A Dynamic Scheduling and Scaling Controller for Managing Distributed Deep Learning Jobs in Kubernetes Cluster
577
