
Using Recurrent Neural Networks for Action and Intention Recognition
of Car Drivers
Martin Torstensson
1
, Boris Duran
2
and Cristofer Englund
2,3
1
Chalmers University of Technology, Gothenburg, Sweden
2
RISE Viktoria, Lindholmspiren 3A, SE 417 56 Gothenburg, Sweden
3
Center for Applied Intelligent Systems Research (CAISR), Halmstad University, SE 301 18 Halmstad, Sweden
Keywords:
CNN, RNN, Optical Flow.
Abstract:
Traffic situations leading up to accidents have been shown to be greatly affected by human errors. To reduce
these errors, warning systems such as Driver Alert Control, Collision Warning and Lane Departure Warning
have been introduced. However, there is still room for improvement, both regarding the timing of when a
warning should be given as well as the time needed to detect a hazardous situation in advance. Two factors that
affect when a warning should be given are the environment and the actions of the driver. This study proposes
an artificial neural network-based approach consisting of a convolutional neural network and a recurrent neural
network with long short-term memory to detect and predict different actions of a driver inside a vehicle. The
network achieved an accuracy of 84% while predicting the actions of the driver in the next frame, and an
accuracy of 58% 20 frames ahead with a sampling rate of approximately 30 frames per second.
1 INTRODUCTION
Traffic safety is today one of the major global soci-
etal challenges and traffic accidents has become one
of the most common causes of death among young
persons (World Health Organization (WHO), 2015).
Human errors are one of the major factors affecting
the situations leading up to traffic accidents (Singh,
2015). Among the systems used today to reduce hu-
man errors are warning systems. Examples of these
warning systems are Driver Alert Control, Collision
Warning and Lane Departure Warning
1
. The inten-
tion of such systems is either to alert the driver of a
hazardous situation or about a certain condition. This
study explores ways to further improve such systems
by taking into account the future state of the driver.
1.1 Related Work
Recurrent neural networks (RNN) with long short-
term memories (LSTM) have previously been used by
(Jain et al., 2016), (Olabiyi et al., 2017) for driver ac-
tion prediction, to predict for example breaking and
lane changes. Methods based on sensor fusion were
1
https://volvo.custhelp.com/app/manuals/
ownersmanualinfo/year/2018/model/V60
applied to data from e.g. the CAN bus, GPS and cam-
eras. The camera input did, in both cases, contain
at least one camera directed at the driver’s face. In
(Jain et al., 2016) a precision of 90.5% and a recall of
87.4% was achieved with 3.16 seconds-to-maneuver.
The focus of these studies are maneuvers and even
though images of the driver were used to predict these
maneuvers they did not cover the state of the driver.
Another method used for prediction of lane
changes was presented in (Pech et al., 2014). The
main concept of the study was to use eye gaze of the
driver for predictions ten seconds in advance. The in-
formation was, in turn, extracted from the angle and
position of the driver’s head. An overall accuracy of
75% was reached. This type of methodology provides
a way to make predictions a long time in advance
however it is sensitive to the position of the drivers
head and what windows the driver looks through and
what mirrors the driver use. In the case of actions
inside the vehicle, the drivers focus on windows and
mirrors might not provide the same information as the
driver might be looking at the road while trying to
reach something inside of the car.
Other studies have focused on the behavior of the
driver, such as (Carmona et al., 2015) a study of the
driver’s level of aggressiveness in different environ-
ments. The inputs used were mainly based on the
232
Torstensson, M., Duran, B. and Englund, C.
Using Recurrent Neural Networks for Action and Intention Recognition of Car Drivers.
DOI: 10.5220/0007682502320242
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 232-242
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

CAN-bus, an inertial measurement unit and GPS. One
upside to the method used was that it did not require
expensive equipment. A downside, on the other hand,
was an adaption phase at the start of each processed
sequence, where the performance was lowered due to
a lack of information. The case of long-time predic-
tions of driver behavior was considered in (Wijnands
et al., 2018). Among the behaviors studied was accel-
eration and whether the speed of the car was within
the legal limits. The study used GPS coordinates of
a test car, sampled at an interval of 30 seconds over a
large period of time, in combination with other infor-
mation.
The use of CNNs to classify the posture of a driver
has been tested in (Yan et al., 2015). In the study im-
ages of the full body posture of the driver was used
to classify four different classes: drive normal, re-
sponding to a cell phone, eating & smoking and oper-
ating the shift gear. With this method, the authors got
an accuracy of 99.78% correct classifications on their
dataset. The same dataset was used in (Yan et al.,
2016) however instead divided into six classes: Call,
Eat, Break, Wheel, Phone play, and Smoke. The clas-
sifications were made using a RCNN and achieved a
mean average precision rate of 97.76%.
Optical flow fields were used in our study as in
order to improve the accuracy of the CNN. This type
of method was also used in (Simonyan and Zisser-
man, 2014). In that study, both the original images
and the optical flow fields were processed in parallel
and the intermediate results were concatenated at the
end of the network. The study’s results were better or
close to the compared methods containing among oth-
ers improved dense trajectories and Spatio-temporal
HMAX. The results suggested that the use of opti-
cal flow gave a better performance compared to raw
frames.
To the best of our knowledge there are no previous
studies investigating predictions of a driver’s actions
inside a car with the use of neural networks. Under-
standing the driver’s intent and thus the future state of
the driver provides a possibility to further anticipate
the driver’s readiness to react to new conditions in a
traffic situation. Hence, valuable information about
how well a driver could handle a driving task or react
to changes in the environment can be gained. There-
fore warning systems could potentially make use of
such information to provide earlier and more accurate
warnings.
In (Jain et al., 2016) the method used to process
facial images was based on a landmark representation
of the face. It might be possible to generalize this
method, from landmarks of facial images to images
of the whole-body posture. Hence, more information
about the driver could potentially be used as the full
body posture can provide more information.
The architecture proposed in the presented study
revolved around two types of neural networks, one
used for classification of images and the other to pre-
dict future events based on sequences of outputs from
the first network. A CNN was used for image clas-
sifications, while an RNN with LSTM generated the
action intention recognition. The training and test-
ing images for the networks depicted the whole-body
posture of the driver.
2 DATA
There are currently few public datasets containing
image sequences of drivers. One of the datasets
was created in (Abouelnaga et al., 2017). The fo-
cus of this dataset was distracted drivers and con-
tains the classes: Drive Safe, Talk Passenger, Text
Right, Drink, Talk left, Text Left, talk Right, Adjust
Radio, Hair & Makeup and Reach Behind. Unfortu-
nately, this dataset is not on a sequential form where
one class leads to another creating a chain of actions
and could therefore not be used in this study. An-
other dataset created by (Jain et al., 2015) consists
of 1180 miles of driver data which is annotated with
turns, lane changes and drive straight. This dataset,
even though it contains images of a driver, does not
focus on driver activity. Therefore the dataset was not
suitable for this study.
The dataset used in this study consists of se-
quences of images, collected using two cameras
mounted inside of a car. During data collection, one
camera was placed in the left A-pillar facing the driver
and the other camera on the side window of the front
passenger seat. Due to safety reasons, the car was
parked during the collection of the data. There were
eight participants performing 13 tasks in a Volvo V40
Cross Country. In total eight classes of driver behav-
ior were used: drive safe, glance, lean, remove a hand
from the steering wheel, reach, grab, retract and hold
object. Examples of these classes can be found in Fig-
ure 1. The drivers were instructed to perform tasks in
a specific order, for example, start by driving safely
then glance, remove a hand from the steering wheel,
lean towards the center then proceed by picking up
an object. Each task was performed five times by
each participant and lasted between 1.5 and 13 sec-
onds. Around 90,000 images were collected. Due to
technical difficulties, the images were captured at ap-
proximately 30 frames per second. The dataset was
then divided into two separate sets where the training
and testing set consisted of 55 and 10 sequences re-
Using Recurrent Neural Networks for Action and Intention Recognition of Car Drivers
233

spectively for each participant. The sequences used
as the test set corresponded to tasks where the driver
was given very few instructions of how the task was
to be performed more than that they would start by
drive safe and then pick up and bring an object to
them. This was to encourage a more natural approach
to how the task was performed. The distributions of
the classes in the training and testing set can be found
in Table 1 for the CNN and in Table 2 for the RNN
with LSTM. A restriction of working with sequences
of actions is that different actions vary in the time it
takes to perform them as well as how often they oc-
cur. It is therefore problematic to create an evenly
distributed dataset. The difficulty in using normaliza-
tion in order to even out the dataset is that all different
types of actions can not be expected to be performed
over an equal amount of time or frequency. An exam-
ple is the classes glance and reach, a person might not
need to glance before picking up an object but do need
to reach for it. The test data was also meant to be as
representative as possible of how the actions would be
performed in reality, which also affects the distribu-
tion in the test set. One example is the very low num-
ber of occurrences of lean in the test dataset, which
suggests that the assumption that lean would be an
important class when a driver is picking up an object
might not be true. It could also mean that the objects
were to close to the driver for lean as a class to play a
significant role. The RNN with LSTM was tested for
each set of 20 frames in each sequence and evaluated
on the corresponding next 20 frames unless the next
20 frames would reach outside of the sequence.
The CNN used in this study requires one ground
truth class label for each image. In practice, it would
be possible for more than one of the classes to be a
valid label for some of the images. In order to use
only one class as a label for the images, a priority
system was created. The system used the last action
taken by the driver that corresponded to a class as the
label. The exceptions to this rule were the classes
grab, retract and holding object that also had a pri-
ority over the other classes.
3 METHOD
3.1 Model Overview
The system proposed in this study is based on two ma-
jor parts, a CNN for image classification and an RNN
with LSTM for action prediction. The CNN and RNN
with LSTM models used in this study were based on
the work by (Torstensson, 2018). A schematic illus-
tration of the system is shown in Figure 2, where the
input to the system is a sequence of images. The
first step in the processing chain is to decrease the
size of the images to 256 by 128 pixels and trans-
form them to grayscale in order to reduce the com-
putational cost. After preprocessing, the images are
classified by the CNN. The classification transformed
the two-dimensional image into a scalar representing
the resulting class for the given frame. The prepro-
cessed images are also converted into optical flow
fields, which are sent into the CNN in parallel to the
original images. The RNN with LSTM then uses the
generated sequence of classes as input to generate a
sequence of scalars representing a prediction of fu-
ture classes. The training process of the CNN and
RNN with LSTM requires a ground truth that can map
each of the images to a specific class. For benchmark-
ing, two different inputs were given to the RNN, the
ground truth of the actual behavior, and the predicted
output from the CNN. Both the CNN and the RNN
with LSTM used cross-entropy as the objective func-
tion.
3.2 Classification
Among the models presented in this study is a plain
CNN model used for classification, which consists of
two CNN blocks shown in Figure 3. The dataset was
captured with two cameras, therefore each time frame
provides two images. These images can be separately
classified, but that can potentially lead to an increase
in errors as well as not making use of the added in-
formation provided by using cameras with different
angles. To make use of this data, two of the CNN
blocks are used in parallel. The outputs are concate-
nated and followed by dense layers. As mentioned in
(Yamashita et al., 2018) dropout layers can be used to
reduce overfittning and have therefore been used af-
ter the dense layers. The plain CNN model does not
receive any benefit from using a sequence of images
compared to separate frames. Another model using
dense optical flow as an additional input was created
to make use of the information in the changes be-
tween the images in the sequence. Optical flow can
be used as a method of representing the changes be-
tween images as a vector field. This can be done by
imposing two assumptions. These assumptions are
that the pixel values are preserved from one image
to the other, though they might be moved around and
the second one that nearby pixel values are moved at a
similar rate (Fleet and Weiss, 2006). The arrays used
as input to the convolution block was on the form
[Batch size, Image height, Image width, Channels]
where Channels was one when the grayscale images
were sent in and two for the dense optical flow fields.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
234
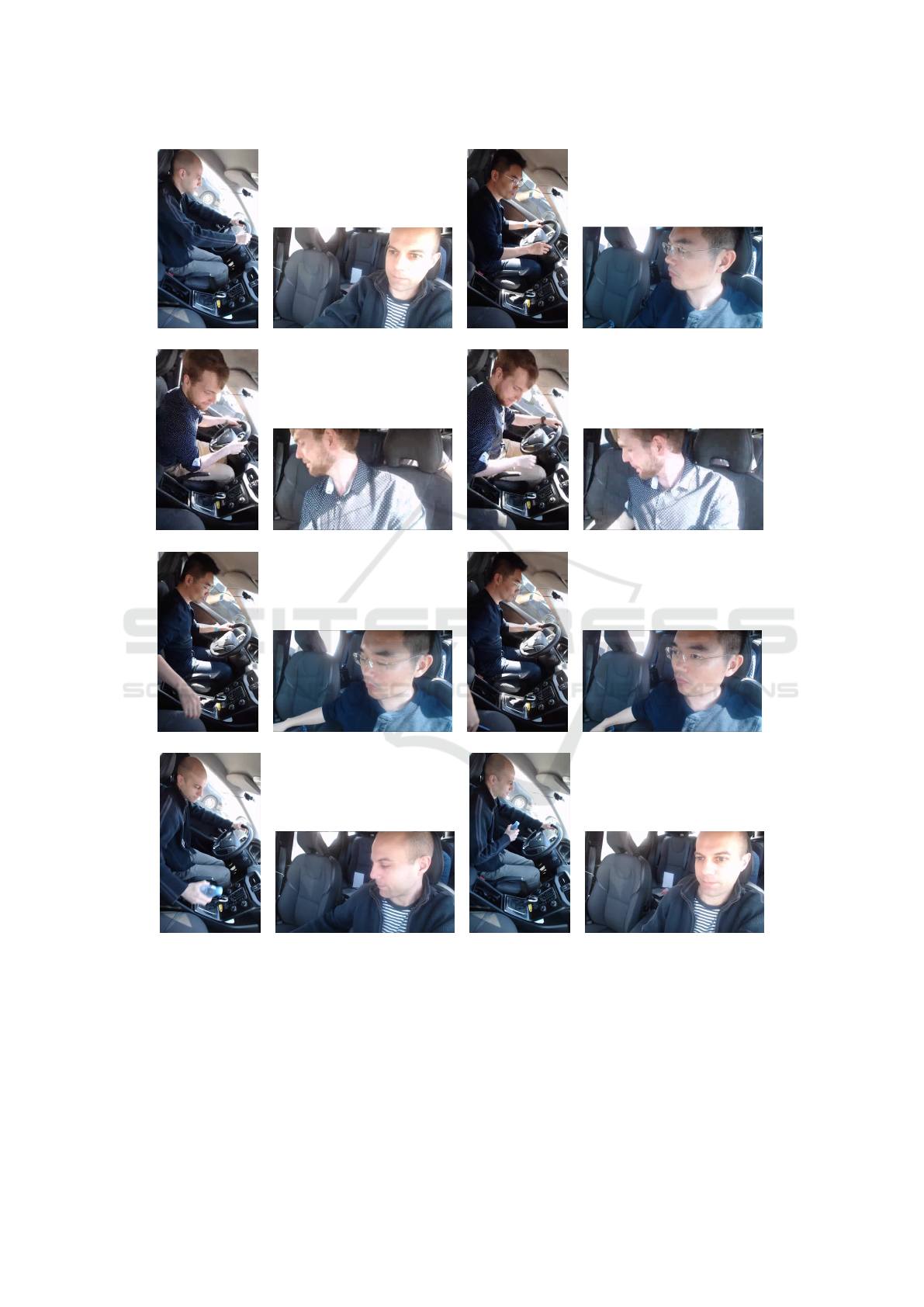
(a) Drive safe (b) Drive safe (c) Glance (d) Glance
(e) Lean (f) Lean (g) Remove hand (h) Remove hand
(i) Reach (j) Reach (k) Grab (l) Grab
(m) Retract (n) Retract (o) Hold (p) Hold
Figure 1: Sample images from the dataset.
The same CNN block can therefore, be used to pro-
cess the optical flow fields as the CNN block process-
ing the images and does so in parallel but with sepa-
rate weights. The optical flow model can be found in
Figure 4.
3.3 Prediction
One of the differences between a RNN and a CNN
is that the RNN keeps a memory when processing a
sequence. The elements of the network, h
t
, can be
calculated, given the input x
t
, at a time t as described
Using Recurrent Neural Networks for Action and Intention Recognition of Car Drivers
235
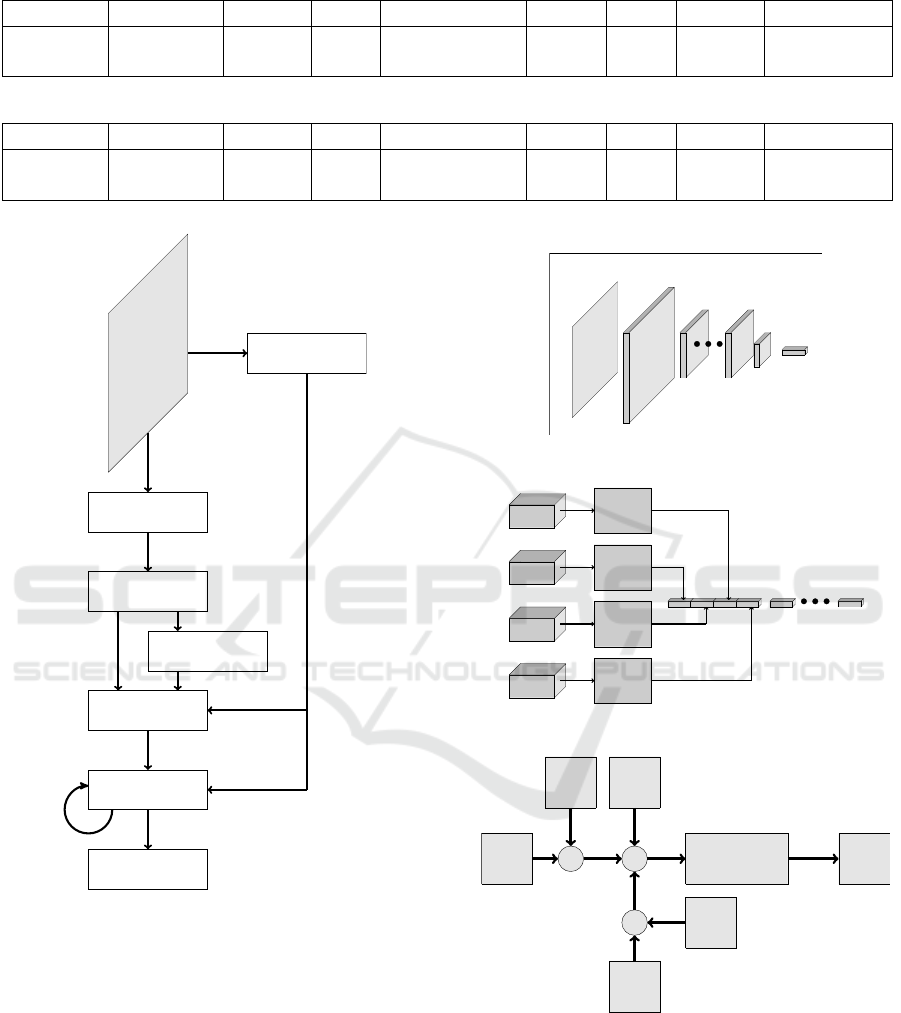
Table 1: Class distributions in testing and training set for the CNN.
Class: Drive safe Glance Lean Remove hand Reach Grab Retract Hold object
Training: 30521 10487 4106 6492 12915 935 3228 7316.
Testing: 6035 578 28 524 2915 268 768 1884
Table 2: Class distributions in testing and training set for the RNN.
Class: Drive safe Glance Lean Remove hand Reach Grab Retract Hold object
Training: 30681 10482 4191 6493 13036 940 3233 7136
Testing: 5944 577 28 522 2915 268 766 1875
Image
Downsample
Ground truth
Grayscale
Optical flow
CNN
LSTM
Output
Figure 2: An illustration of the system used in this study.
in Figure 5. Where W , H are the weights and b a bias
(Jain et al., 2016).
The elements are therefore calculated by also us-
ing the previous elements, this is why it can be viewed
as having a memory as previous inputs also affect the
later ones. One problem with RNNs is known as the
vanishing and exploding gradients problem (Pascanu
et al., 2012).
One way to handle this issue is to use a version of
RNN called RNN with LSTM, which is illustrated in
Figure 6. The intention of adding the LSTM is, in-
stead of storing the information in the hidden unit, to
CNN block
Image
Convolution
Maxpool
Convolution
Maxpool
Figure 3: The structure of the CNN block.
Frontal camera
CNN block
Frontal flow
CNN block
Side camera
CNN block
Side flow
CNN block
DenseDense
Figure 4: The structure of the CNN with optical flow.
Non-linear function
h
t
+
b
×
x
t
×
h
t−1
H
W
Figure 5: A chart of an RNN.
use a memory cell for information storage. The mem-
ory cell, c
t
, is then passed on for each element of the
sequence. The update of the hidden unit is in this case
based on three gates: The input gate (i
t
), the forget
gate ( f
t
) and the output gate (o
t
). These gates deter-
mine the flow of information in and out of the memory
cell as well as the update of the hidden state. The σ is
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
236
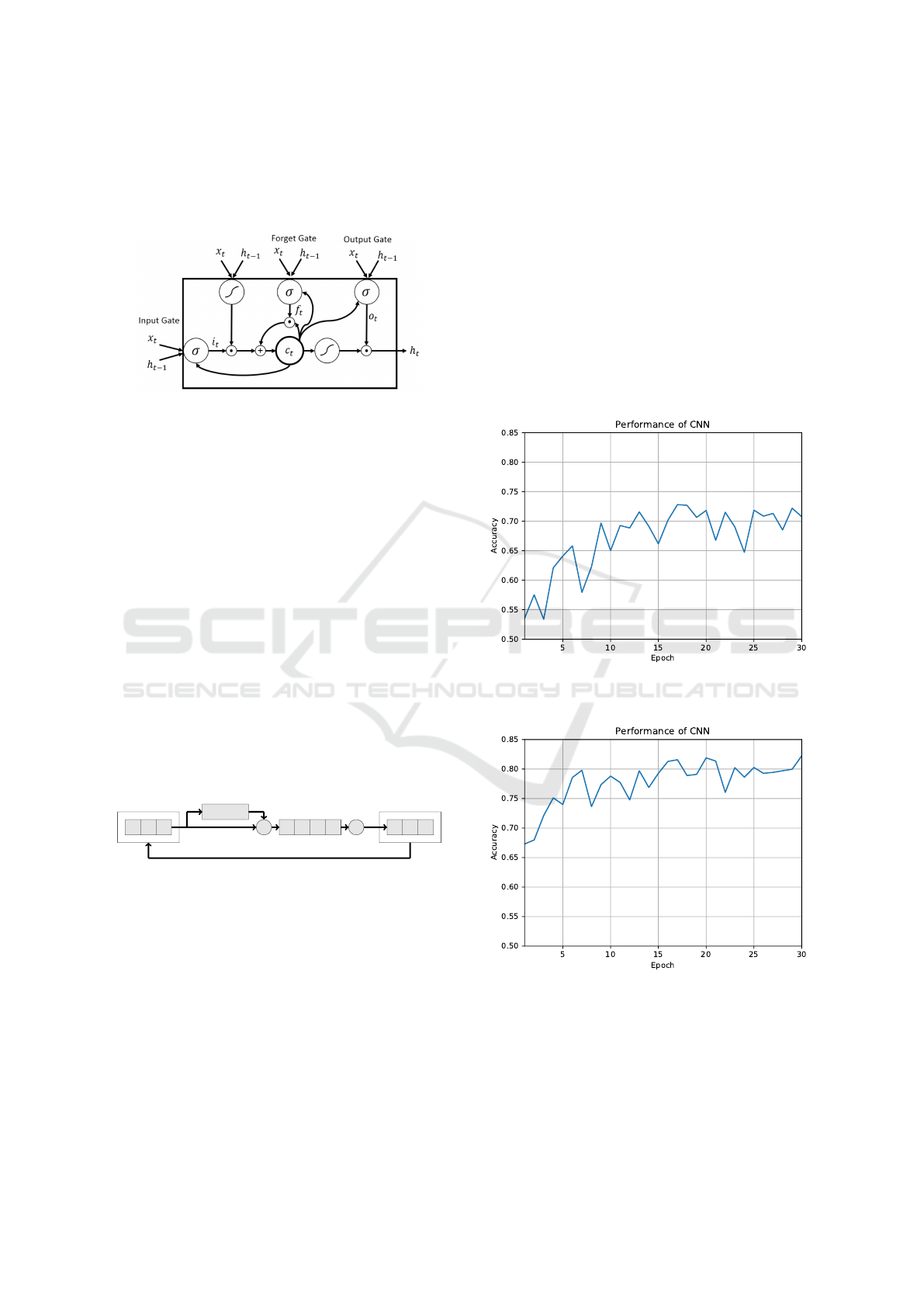
a logistic function, the wave is a non-linearity and x
t
the input at time t. The benefit of using LSTM is that
the structure uses summations, which reduces the risk
of vanishing or exploding gradients (Jain et al., 2016).
Figure 6: LSTM cell diagram from (Jain et al., 2016).
The main task of the RNN with LSTM presented
in the study is to predict the next element of the in-
put sequence. More specifically a bidirectional RNN
with LSTM has been used but will be referred to as
RNN with LSTM for simplicity (Schuster and Pali-
wal, 1997). The sequences used as input is either from
the CNN or the ground truth depending on which
model is being used. With a sequence of size t the
predicted element can be added at t = 0 and the last
element is removed. The newly created sequence can
then be used as an input to the RNN with LSTM
to generate yet another element. By repeating this
process, predictions of an infinite number of frames
ahead can be made. The process is illustrated in Fig-
ure 7. When one of the predictions is used as an input
in the following iterations there is a risk that an incor-
rect prediction will lower the accuracy of coming pre-
dictions as the input is incorrect. Using this approach
introduces a risk of propagating errors leading to a
lowered average accuracy for each frame predicted.
S
t−2
S
t−1
S
t
RNN
S
t−2
S
t−1
S
t
S
t+1
S
t−1
S
t
S
t+1
+
−
Figure 7: An overview of the prediction process of the RNN
with LSTM proposed in this study.
4 RESULTS
The CNN and RNN with LSTM were trained and
tested separately. The CNN was tested for different
number of epochs, while the RNN was tested for dif-
ferent number of epochs and values of the hyperpa-
rameters. One epoch of training with the CNN us-
ing opticalflow took approximately 10 minutes on a
GeForce GTX 1080 Ti. The RNN wih LSTM took
slightly above one minute on the same device.
4.1 Classification
Two tests were done on the CNN, one on the plain
CNN, see Section 3.2, and one on the optical flow
CNN. In Figure 8 the results of the plain CNN can be
seen. In this figure, the x-axis is the number of epochs
trained and the y-axis the accuracy, where the accu-
racy is defined as the number of correctly classified
images divided by the total number of images. Fig-
ure 9 shows the results of the optical flow CNN. With
the first model, the best accuracy achieved was 73%
while the best with the second model was 82%. The
later model performed better and was the one used in
later tests with the RNN.
Figure 8: The accuracy of the CNN for different number of
epochs trained.
Figure 9: The accuracy of the CNN, with the addition of
parallel optical flow input, for different number of epochs
trained.
4.2 Prediction
In order to set the model hyperparameters of the RNN
with LSTM, Bayesian optimization was used. The
Using Recurrent Neural Networks for Action and Intention Recognition of Car Drivers
237
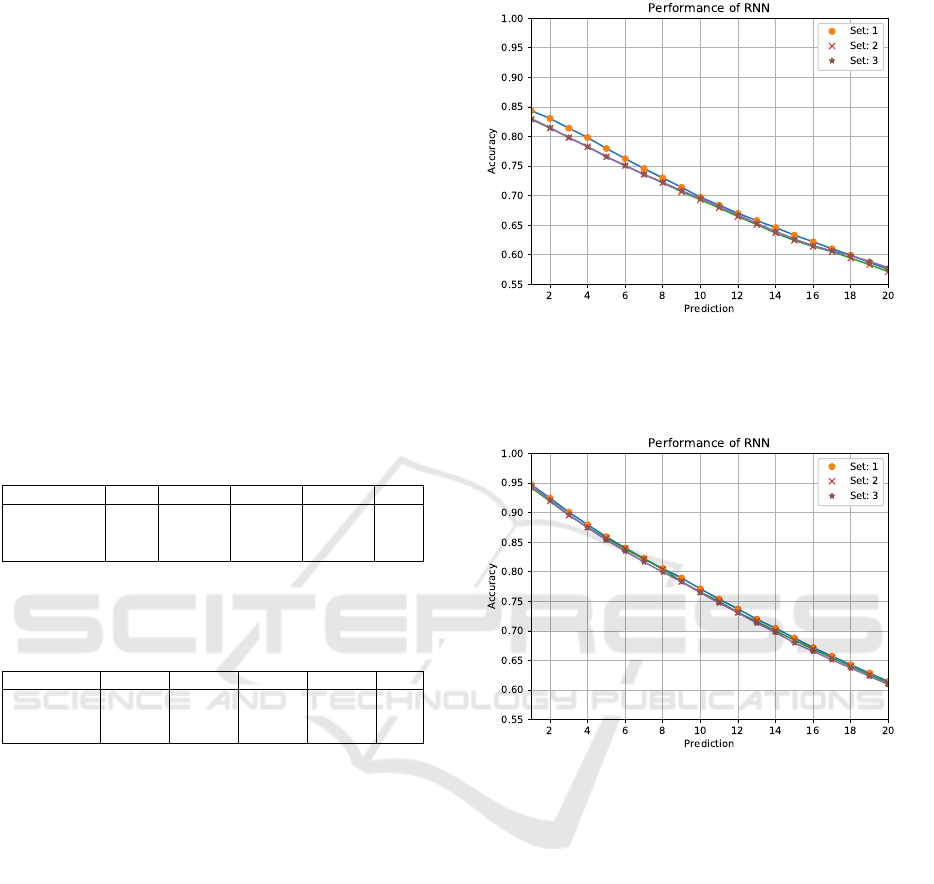
network was first tested with random values within
set bounds of the hyperparameters. The hyperparam-
eters, to be tuned this way, were the number of hidden
units and layers, and the learning rate. In Figure 10
the results of different sets of hyperparameters can be
found, the input data was from the CNN. The y-axis
is the accuracy and the x-axis the number of frames
predicted into the future. Similarly, the results when
using the ground truth as input the performance for
different sets of hyperparameters can be found in Fig-
ure 11. Testing the RNN with LSTM on the ground
truth data represents a test where the CNN would per-
form perfectly. The best performing hyperparameters,
as well as the search space set for the case of CNN in-
put data and ground truth input data, can be found in
Table 3 and 4 respectively.
Table 3: Hyperparameters used in the test of the RNN with
LSTM on the CNN input data. From left to right are the hy-
perparameter sets shown in Figure 10, best received value,
minimum bound and maximum bound.
Parameter Set:1 Set:2 Set:3 Min Max
Hidden units 50 148 120 50 150
Layers 2 1 2 1 2
Learningrate 0.02 0.00865 0.01610 0.00001 0.02
Table 4: Hyperparameters used in the test of the RNN with
LSTM on the ground truth input data. From left to right are
the hyperparameter sets shown in Figure 11, best received
value, minimum bound and maximum bound.
Parameter Set:1 Set:2 Set:3 Min Max
Hidden units 149 50 50 50 150
Layers 1 2 2 1 2
Learningrate 0.01987 0.01423 0.01555 0.00001 0.02
The RNN with LSTM was tested both on the out-
put from the CNN and the ground truth. Results
from the tests can be found in Figures 12 and 13 re-
spectively. The x-axis represents the number of time
frames predicted into the future and the y-axis the ac-
curacy. The accuracy is defined as the number of cor-
rect predictions divided by the total number of pre-
dictions separately for each of the time steps. The
different lines are varying amounts of epochs trained
and the dotted line a comparison. The intention of
the comparison is to show the case if the predictions
would be a repetition of the last element in the input
as if there would be no transition between classes.
The best results with the CNN input data was 84%
accuracy when predicting one frame ahead and 58%
accuracy when predicting 20 frames ahead. The net-
work outperformed the comparison for all future time
steps with a growing margin for longer time predic-
tions. In the case when using the ground truth data
as input, the best performance gave an accuracy of
96% after one frame and 61% after 20 frames. The
Figure 10: Accuracy of the RNN with LSTM, tested on the
CNN input data, at different numbers of frames predicted.
Each line represents one set of hyperparameters, which can
be founds in Table 3.
Figure 11: Accuracy of the RNN with LSTM, tested on
the ground truth input data, at different numbers of frames
predicted. Each line represents one set of hyperparameters,
which can be found in Table 4.
comparison performed better for very short time pre-
dictions but fell of quicker resulting in a better perfor-
mance of the network with longer time predictions.
There is a clear trend in both cases of dropping accu-
racy with longer time predictions. This could prob-
ably, at least in part, be related to the accumulating
error in the model used.
To further evaluate the performance of the RNN
with LSTM, trained and tested with ground truth data
as input, confusion matrices were created containing
the recall and precision as defined in (Powers, 2008).
The results for one frame predictions can be seen in
Tables 5 and 6, while the 20 frames predictions can
be found in Tables 7 and 8.
Out of all classes, the ones that the model per-
formed best for were drive safe, reach and hold. These
classes were also the ones appearing the most in the
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
238
Table 5: Recall of one frames prediction.
Ground truth
Drive safe Glance Lean Remove hand Reach Grab Retract Hold
Predicted
Drive safe 1.0 0.07 0.04 0.09 0.0 0.0 0.0 0.0
Glance 0.0 0.92 0.04 0.06 0.0 0.0 0.0 0.0
Lean 0.0 0.0 0.79 0.0 0.0 0.0 0.0 0.0
Remove hand 0.0 0.01 0.07 0.84 0.02 0.0 0.0 0.0
Reach 0.0 0.0 0.07 0.0 0.97 0.27 0.0 0.0
Grab 0.0 0.0 0.0 0.0 0.0 0.27 0.0 0.0
Retract 0.0 0.0 0.0 0.0 0.0 0.42 0.81 0.03
Hold 0.0 0.0 0.0 0.0 0.0 0.03 0.19 0.97
Table 6: Precision of one frames prediction.
Ground truth
Drive safe Glance Lean Remove hand Reach Grab Retract Hold
Predicted
Drive safe 0.98 0.01 0.0 0.01 0.0 0.0 0.0 0.0
Glance 0.02 0.92 0.0 0.05 0.01 0.0 0.0 0.0
Lean 0.0 0.0 0.88 0.08 0.0 0.04 0.0 0.0
Remove hand 0.0 0.01 0.0 0.83 0.14 0.0 0.0 0.0
Reach 0.0 0.0 0.0 0.0 0.98 0.02 0.0 0.0
Grab 0.0 0.0 0.0 0.0 0.0 1.0 0.0 0.0
Retract 0.0 0.0 0.0 0.0 0.0 0.16 0.8 0.04
Hold 0.0 0.0 0.0 0.0 0.0 0.01 0.14 0.85
dataset, while the ones appearing significantly less
could obtain a value as low as 0%.
5 DISCUSSION
One possible reason for why the CNN could be im-
proved with optical flow is that it works in the time
dimension as well. Hence, information in the se-
quence which is hard to extract from single frames,
such as the direction of movement, can be used. This
effect could also potentially be useful with the priority
system used for annotating the data. One still frame
might not be sufficient to extract the information of
which action was performed last.
The results of the best performing hyperparam-
eters for the RNNs with LSTM showed that differ-
ent sets of hyperparameters performed similarly. It
appeared that the best choice of the number of lay-
ers was one for the ground truth input and two for
the CNN input. The best value of the learning rate
was also high, which might have been due to the low
amount of epochs used in each training phase.
The results in (Jain et al., 2016) and (Pech et al.,
2014) are difficult to compare with the results in this
study due to the differences in timescale and actual
task. The predictions focused on movements of the
car rather than the actions of the driver. Consequently
the timescale differs from the one in this study where
the classes changes constantly during a sequence and
a single class can last a few frames. The sensor fusion
approach used in (Jain et al., 2016) could provide an
interesting prospect of further work if combined with
the method in the study presented here.
The studies (Yan et al., 2015) and (Yan et al.,
2016) achieved higher classification accuracy on their
dataset than the one presented here. A major dif-
ference between these studies and the one presented
here is that our study classifies sequences of images
with shifting classes, which the other studies, to our
knowledge, does not. Therefore there are transitions
between the classes, which can be challenging for a
machine or human to classify and therefore contribut-
ing to the difference in classification accuracy.
The variation in performance, on different classes,
shown by the confusion matrices could be due to how
the more well-represented classes become more likely
to be predicted as they have a larger probability of ap-
pearing. With an increasing amount of the smaller
classes becoming part of the larger classes in each
iteration the probability of prediction might increase
for the larger classes as they appear more often. This
type of effect could potentially be mitigated with the
use of a bias correction that evens out the probability
of each class being chosen. This type of correction,
on the other hand, run the risk of creating a network
Using Recurrent Neural Networks for Action and Intention Recognition of Car Drivers
239
Table 7: Recall of 20 frames prediction.
Ground truth
Drive safe Glance Lean Remove hand Reach Grab Retract Hold
Predicted
Drive safe 0.94 0.77 0.54 0.79 0.28 0.0 0.0 0.0
Glance 0.05 0.19 0.46 0.08 0.09 0.0 0.0 0.0
Lean 0.0 0.0 0.0 0.0 0.01 0.0 0.0 0.0
Remove hand 0.01 0.03 0.0 0.13 0.12 0.04 0.02 0.0
Reach 0.01 0.0 0.0 0.0 0.51 0.96 0.9 0.23
Grab 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Retract 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.01
Hold 0.0 0.0 0.0 0.0 0.01 0.0 0.08 0.76
Table 8: Precision of 20 frames prediction.
Ground truth
Drive safe Glance Lean Remove hand Reach Grab Retract Hold
Predicted
Drive safe 0.65 0.09 0.0 0.07 0.18 0.0 0.0 0.0
Glance 0.29 0.18 0.02 0.06 0.45 0.0 0.0 0.0
Lean 0.0 0.0 0.0 0.0 0.95 0.0 0.0 0.05
Remove hand 0.04 0.04 0.0 0.11 0.74 0.02 0.04 0.01
Reach 0.01 0.0 0.0 0.0 0.51 0.09 0.24 0.15
Grab nan nan nan nan nan nan nan nan
Retract 0.0 0.0 0.0 0.0 0.0 0.0 0.0 1.0
Hold 0.0 0.0 0.0 0.0 0.01 0.0 0.04 0.95
that repeatedly predicts small classes that barely ever
appear and therefore lowers the accuracy. The preci-
sion and recall could potentially also be improved by
using a cost function which uses those measurements.
By changing the cost function there is potential to re-
ward the correct classification of the smaller classes
and better adjust to the distribution of the dataset.
It would also be possible to change the dataset
from the system of priority into a system where sev-
eral classes can be used as a label for an image. One
potential benefit of this could be an increase in the ac-
curacy of the CNN with less reliance on the optical
flow. Hierarchical clustering is a method that poten-
tially could be used. If done in a divisive manner one
general class could be split up into subclasses, which
in turn also can be split up into further subclasses. In
such a manner a tree structure of classes could be cre-
ated (Zhang et al., 2017).
The CNN used for classification could potentially
be improved by implementing features from some of
the networks performing well in benchmarks such as
ImageNet, one example is GoogleNet (Russakovsky
et al., 2015). The network used could also easily be
replaced with another network trained for the same
type of data as the CNN was used as a separate mod-
ule.
6 CONCLUSIONS
This work presents an RNN with LSTM to predict ac-
tion and intention for car drivers. The proposed sys-
tem consists of two modules: one CNN and one RNN
with LSTM. The CNN classifies images into one of
the eight known action classes. The CNN use four
parallel images as input, two with images from two
different cameras mounted inside the cabin of the test
car and two images that correspond to the optical flow
fields of the two camera images.
The classification accuracy of the CNN was 73%
while using only the two camera images and when
adding the two optical flow images 82% accuracy was
achieved. The RNN with LSTM was used to pre-
dict future intentions of the car driver. The RNN with
LSTM takes as input an array of classifications made
by the CNN to predict the action in the next frame.
Two approaches were compared. One where the RNN
with LSTM classifications from the CNN were used
as input and one where the ground truth was used as
input.
The best prediction accuracies achieved was 84%
for one frame ahead predictions and 58% after 20
frames ahead in the case of using the output of the
CNN as input data. When using the ground truth as
input the accuracies were increased to 96% after one
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
240
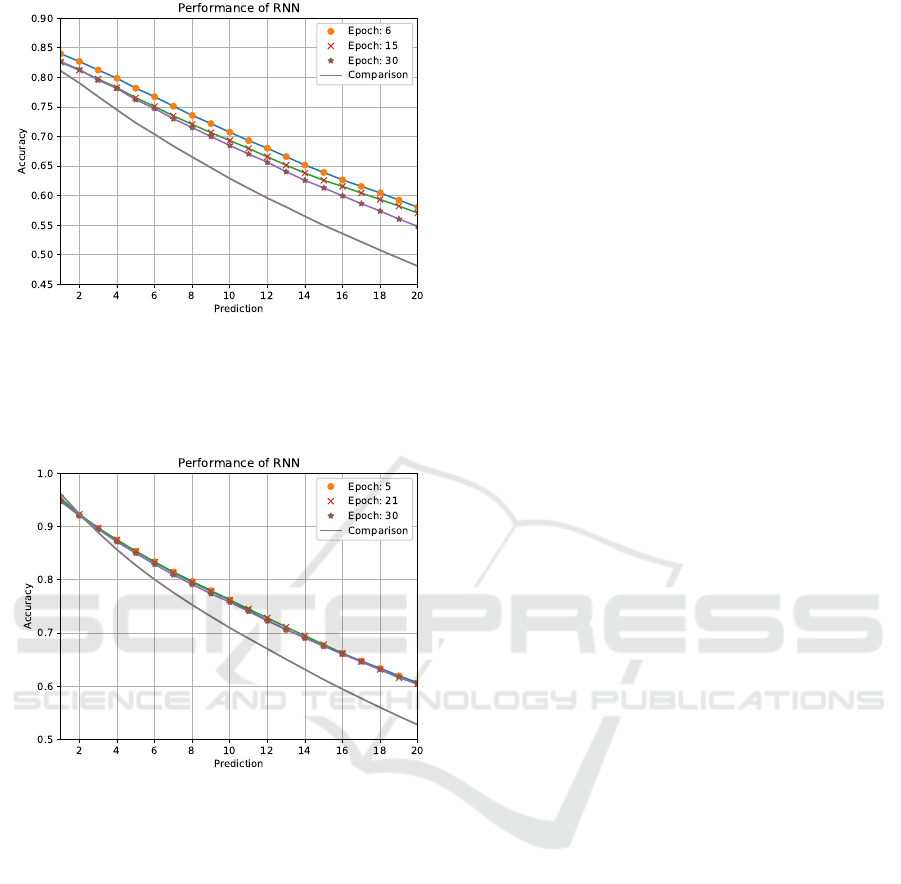
Figure 12: Accuracy of the RNN with LSTM with the best
performing hyperparameters, tested on the CNN input data,
at different numbers of frames predicted. Each line repre-
sents a different amount of epochs trained and the dotted
line is a comparison.
Figure 13: Accuracy of the RNN with LSTM with the best
performing hyperparameters, tested on the ground truth in-
put data, at different numbers of frames predicted. Each
line represents a different amount of epochs trained and the
dotted line is a comparison.
frame ahead and 61% after 20 frames.
ACKNOWLEDGMENT
This work is part of the AIR project (action and
intention recognition in human interaction with au-
tonomous systems), financed by the KK foundation
under the grant agreement number 20140220.
REFERENCES
Abouelnaga, Y., Eraqi, H. M., and Moustafa, M. N.
(2017). Real-time distracted driver posture classifi-
cation. CoRR, abs/1706.09498.
Carmona, J., Garca, F., Martn, D., Escalera, A. d. l., and
Armingol, J. M. (2015). Data fusion for driver be-
haviour analysis. Sensors, 15(10):25968–25991.
Fleet, D. and Weiss, Y. (2006). Optical Flow Estimation,
pages 237–257. Springer US, Boston, MA.
Jain, A., Koppula, H. S., Raghavan, B., Soh, S., and Saxena,
A. (2015). Car that knows before you do: Anticipat-
ing maneuvers via learning temporal driving models.
In The IEEE International Conference on Computer
Vision (ICCV).
Jain, A., Singh, A., Koppula, H. S., Soh, S., and Saxena,
A. (2016). Recurrent neural networks for driver ac-
tivity anticipation via sensory-fusion architecture. In
2016 IEEE International Conference on Robotics and
Automation (ICRA), pages 3118–3125.
Olabiyi, O., Martinson, E., Chintalapudi, V., and Guo, R.
(2017). Driver Action Prediction Using Deep (Bidi-
rectional) Recurrent Neural Network. ArXiv e-prints.
Pascanu, R., Mikolov, T., and Bengio, Y. (2012). Un-
derstanding the exploding gradient problem. CoRR,
abs/1211.5063.
Pech, T., Lindner, P., and Wanielik, G. (2014). Head track-
ing based glance area estimation for driver behaviour
modelling during lane change execution. In 17th
International IEEE Conference on Intelligent Trans-
portation Systems (ITSC), pages 655–660.
Powers, D. (2008). Evaluation: From precision, recall and
f-factor to roc, informedness, markedness & correla-
tion. Mach. Learn. Technol., 2.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Schuster, M. and Paliwal, K. K. (1997). Bidirectional re-
current neural networks. IEEE Transactions on Signal
Processing, 45(11):2673–2681.
Simonyan, K. and Zisserman, A. (2014). Two-stream
convolutional networks for action recognition in
videos. In Ghahramani, Z., Welling, M., Cortes, C.,
Lawrence, N. D., and Weinberger, K. Q., editors, Ad-
vances in Neural Information Processing Systems 27,
pages 568–576. Curran Associates, Inc.
Singh, S. (2015). Critical reasons for crashes investigated
in the national motor vehicle crash causation survey.
Washington, DC: National Highway Traffic Safety
Administration. (Traffic Safety Facts CrashStats. Re-
port No. DOT HS 812 115).
Torstensson, M. (2018). Prediction of driver actions with
long short-term memory recurrent neural networks.
Master’s thesis, Chalmers University of Technology.
Retrieved from http://studentarbeten.chalmers.se/.
Wijnands, J. S., Thompson, J., Aschwanden, G. D., and
Stevenson, M. (2018). Identifying behavioural change
Using Recurrent Neural Networks for Action and Intention Recognition of Car Drivers
241

among drivers using long short-term memory recur-
rent neural networks. Transportation Research Part
F: Traffic Psychology and Behaviour, 53:34 – 49.
World Health Organization (WHO) (2015). Global Status
Report on Road Safety 2015. WHO Press, Geneva.
Yamashita, R., Nishio, M., Do, R. K. G., and Togashi, K.
(2018). Convolutional neural networks: an overview
and application in radiology. Insights into Imaging,
9(4):611–629.
Yan, C., Zhang, B., and Coenen, F. (2015). Driving pos-
ture recognition by convolutional neural networks. In
2015 11th International Conference on Natural Com-
putation (ICNC), pages 680–685.
Yan, S., Teng, Y., Smith, J. S., and Zhang, B. (2016).
Driver behavior recognition based on deep convolu-
tional neural networks. In 2016 12th International
Conference on Natural Computation, Fuzzy Systems
and Knowledge Discovery (ICNC-FSKD), pages 636–
641.
Zhang, Z., Murtagh, F., Van Poucke, S., Lin, S., and Lan,
P. (2017). Hierarchical cluster analysis in clinical
research with heterogeneous study population: high-
lighting its visualization with r. Annals of transla-
tional medicine, 5(4):75.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
242
