Overcoming Labeling Ability for Latent Positives:
Automatic Label Correction along Data Series
Azusa Sawada and Takashi Shibata
NEC Corpolation, Kanagawa, Japan
Keywords:
Machine Learning, Label Correction, Series Data, Early Detection.
Abstract:
Although recent progress in machine learning has substantially improved the accuracy of pattern recognition
and classification task, the performances of these learned models depend on the annotation quality. Therefore,
in the real world, the accuracy of these models is limited by the labelling skills of the annotators. To tackle this
problem, we propose a novel learning framework that can obtain an accurate model by finding latent positive
samples that are often overlooked by non-skilled annotators. The key of the proposed method is to focus on
the data series that is helpful to find the latent positive labels. The proposed method has two main interacting
components: 1) a label correction part to seek positives along data series and 2) a model training part on
modified labels. The experimental results on simulated data show that the proposed method can obtain the
same performance as supervision by oracle label and outperforms the existing method in terms of area under
the curve (AUC).
1 INTRODUCTION
In many applications such as anormaly detection for
visual inspection and medical image analysis, au-
tomation or support systems need to be developed to
reduce labor costs. To construct such systems, it is
almost necessary to use machine learning methods,
which have substantially improved the accuracy of
pattern recognition and classification tasks. In partic-
ular, recent sophisticated models, e.g., deep convolu-
tional neural networks (Krizhevsky et al., 2012), can
achieve even better accuracy than humans.
In general, however, the performances of the mod-
els trained by such machine learning algorithms are
still limited by label quality of training data be-
cause machine learning techniques usually optimize
a model so that the model can infer assigned labels as
long as possible. For example, if positive labels are
assigned only to the absolutely positive samples (e.g.,
large tumor after critical phase), the obtained model
using this training data recognizes only the large tu-
mor. Therefore, the annotation process is absolutely
critical for the performance of the machine learning
application.
However, this annotation process usually requires
much cost, because accurate labels can be annotated
only by specialists for each application, e.g., a med-
ical specialist for cancer detection. Therefore, a ma-
𝜃
Side parameter 𝑡
Positive
Negative
Original label
“Negative”
𝑡
0
Corrected label
𝑡
0
− 𝜃
“Negative”
“Positive”
“Positive”
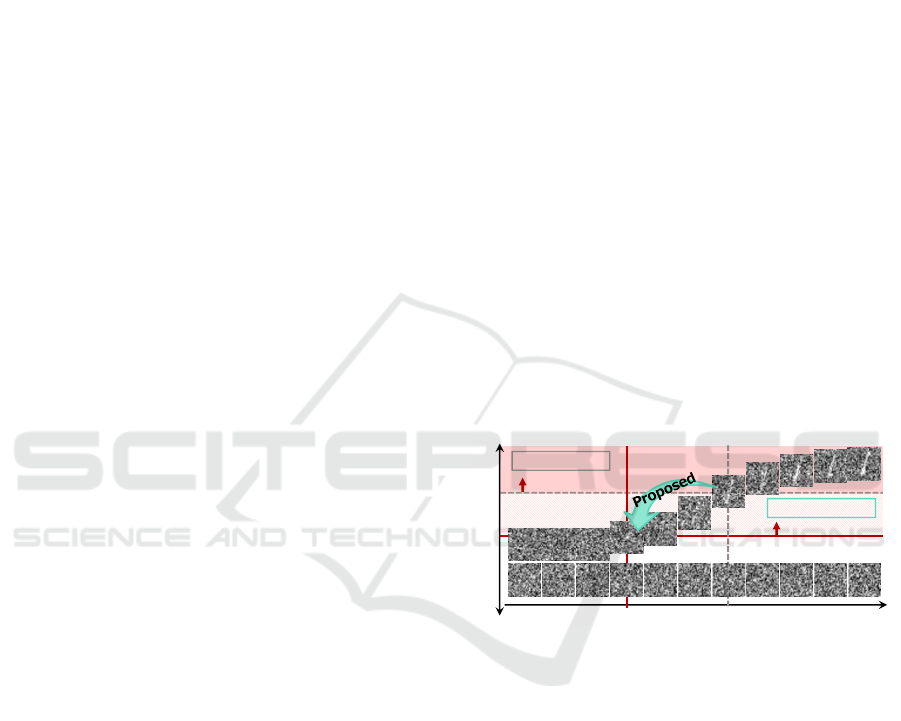
Figure 1: Concept of proposed method. Original labels are
insensitive to positives and include some overlooking. Our
method corrects labels in upper series to positive as long
as there are discriminable differences from lower series im-
ages or those remaining negative in upper series.
chine learning method is highly demanded that can
obtain an accurate model from inaccurate labels an-
notated by non-specialists.
To address this problem, we consider a way to
train models to be as sensitive to positives as they can
be without being limited by the insensitive annotation
for training datasets. In this paper, we propose a novel
framework to seek and learn latent positives missing
in negative labeled data by utilizing external informa-
tion indicating the relationship between data acquired
as a series. The concept of the proposed method is
shown in Fig. 1. Although original labels are insensi-
tive to positives, our method corrects negative labels
to positive ones for data in the upper series, which
406
Sawada, A. and Shibata, T.
Overcoming Labeling Ability for Latent Positives: Automatic Label Correction along Data Series.
DOI: 10.5220/0007341704060413
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 406-413
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
contains original positives, as long as there are dis-
criminable differences from negatives. Our method
has two main interacting components: 1) a label cor-
rection part to seek positives along data series, and
2) a model training part on modified labels. The for-
mer process gives modified labels to the latter one,
and the latter process evaluates the separability of la-
bels from the former one by the performance of the
trained model.
Although various existing methods(Tanaka et al.,
2018) to deal with incorrect labels have been pro-
posed, these cannot find missing positives distributed
around a class boundary because they try to correct
labels in accordance with consistency in data distri-
bution. Since most of them try to find outliers as mis-
labeled examples, it is difficult to correct consistent
labels such as pseudo labels made by other models.
Contrary to existing approaches, our idea utilizes
additional information that is effective to find missing
positive data. Specifically, from the relationship be-
tween data acquisition conditions, we can guess posi-
tive candidates and certainly negative data. For exam-
ple, in medical diagnosis, X-lay images are captured
in the same region in the same patient on different
days. If a large tumor is found in the image taken on
the last day, a small tumor or sign of it may already
exist in previous images. This is less likely to occur
for much earlier data. In contrast, the areas labeled as
negative in last-day images are certainly also negative
in the past images. As a generalization of this situa-
tion, we consider data acquired as series that capture
common objects under different parameters such as
time, lightning conditions, and focus levels as shown
in Figure 2. This side parameter and series ID are
also to be registered with each data. The separabil-
ity of positives from negatives increases as the side
parameter changes in each series including positives.
The proposed method tries to optimize the model
and label correction parameterized by side parameter
range, so that it satisfies the requirements of good per-
formance over all data and high sensitivity to latent
positives. To the best of our knowledge, this is the
first method that can automatically correct the labels
using the property of the data series. The experiments
on two synthesized datasets show that our method can
achieve the same sensitivity as that by supervision by
oracle labels from the synthesis model, despite poor
given labels.
2 RELATED WORKS
There are many approaches to learn from dataset con-
taining wrong labels, especially related to neural net-
Side param.
Positive series
Negative series
・・・
Series index
・・・
○ Positives
□ Negatives
Latent
positives
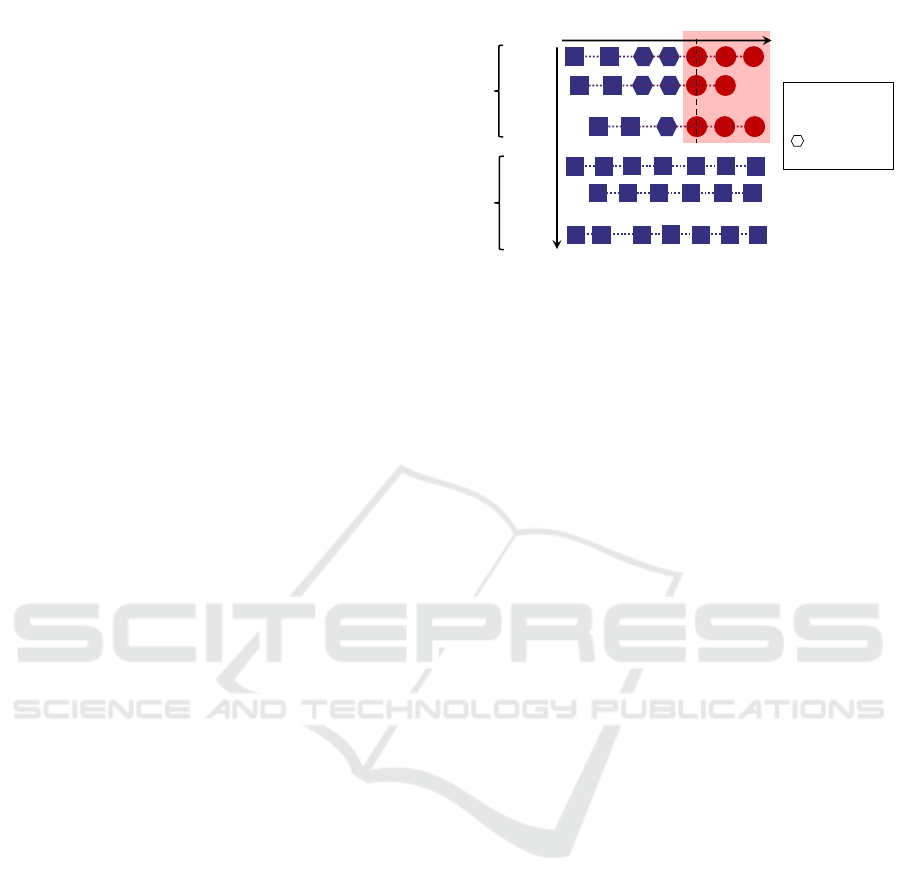
Figure 2: Illustration of data series. Positive series are series
including positive data and negative series are series with-
out any positives. Each data has two indices: series index
and side parameter index within its series. We assume there
are hidden positives near t = t
0
, the side parameter value
corresponding to the first positive in the series.
work models recently. These methods are roughly
classified into two categories: 1) robust learning un-
der label noise, and 2) label correction.
2.1 Robust Learning under Label Noise
One of the ways to deal with incorrect labels is to
surpress the influence of them. Regularlization meth-
ods are effective to learn without overfitting to noise
(Arpit et al., 2017; Jindal et al., 2016). The meth-
ods Backward and Forward in (Patrini et al., 2017)
modify loss function to exclude the noise effect from
optimization using an estimated label noise model by
transition matrix. As similar modeling, linear layer
to absorb noise effect is added on top of the network
architecture in (Goldberger and Ben-Reuven, 2017;
Sukhbaatar et al., 2015). There are also more explicit
treatment of noise such as (Wang et al., 2018) de-
tect outliers and assigns small weight to them. These
methods will not suit our goal because they just cancel
the noise effect without trying to learn missing posi-
tives as positive.
2.2 Label Correction
The other approach is to correct wrong label before
or during training and use it as target label. They
often require an extra dataset with ground truth of
pre-identified noisy labels to construct label clean-
ing model (Veit et al., 2017; Xiao et al., 2015; Vah-
dat, 2017). In the case that all annotators are non-
specialists, however, it is impossible to prepare such
clean dataset.
Most of works that don’t need small clean dataset
use original labels partially. Bootstrap (Reed et al.,
2015) replaces the target labels with a combination
Overcoming Labeling Ability for Latent Positives: Automatic Label Correction along Data Series
407
of raw target and their predicted labels. D2L (Ma
et al., 2018) uses local intrinsic dimensionality to de-
cide when to start using predicted labels for train-
ing and increase the weight of prediction as learning
epoch. Joint optimization (Tanaka et al., 2018) also
learn only from noisy data but it completely replace
labels by prediction learned with regularization term.
However, they cannot correct mistakes that are
easy for models to fit. It is impossible to find sam-
ples to be corrected only by data distribution in the
case of such consistent mistakes that all hard positives
labeled as negative.
Therefore, we avoid the difficulty in justifying the
label correction by utilizing a similarity not in feature
space but in side information such as observing con-
ditions. Note that Li et al. (2017) also utilized side
information other than the dataset, but it is only used
to regularize the learning of clean dataset to cope with
its small amount (Li et al., 2017).
3 PROPOSED METHOD
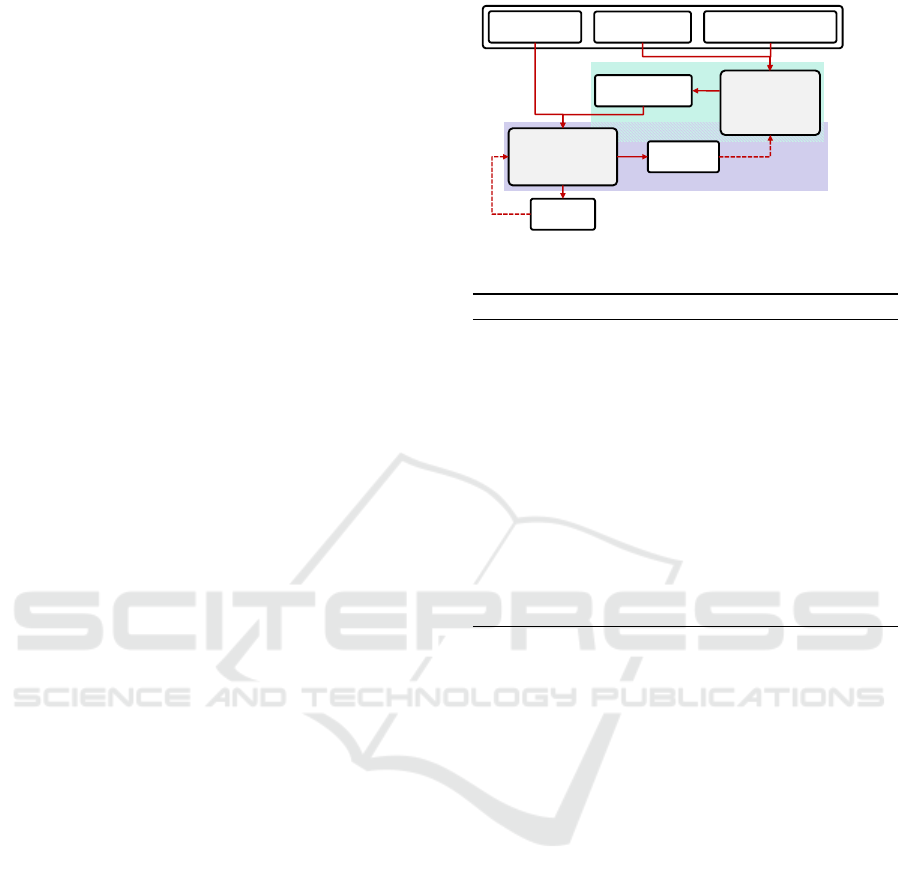
The overview of the proposed framework is shown in
Figure 3. As explained in Sec. 1, we assume that the
training dataset consists of series with additional la-
bels, side parameter t along each series. The dataset
has data X = {X
αi
}, label Y = {Y
αi
}, and side pa-
rameter t = {t
αi
} with two indices α, i (α = 1,··· ,N.
i = 1,··· ,M
α
) to identify the series and the side pa-
rameter point, respectively. The proposed method
has two main interacting components: 1) label con-
troller: a label correction part to seek positives along
data series, and 2) classifier: a model training part.
The classifier is trained with labels modified by the la-
bel controller. The label controller recieves the train-
ing result from the classifier to justify current param-
eter. In this section, the label controller and its pa-
rameterization are explained in Sec. 3.1. After that,
the concept of the optimization of label control pa-
rameter is presented in Sec. 3.2. Finally, the overall
picture and optimization procedure of our method are
described in Sec. 3.3.
3.1 Label Control along Series
We first explain the details of the label controller that
can seek the latent positives along data series.
Missing positive data can be found in negatives
from positive series, and this is more likely to happen
if their side parameters are close to those of nearby
positives as shown in Fig. 2. However, not all neg-
ative data in positive series are latent positives that
have cognitive differences from other negatives.
⇒Sec. 3.1
⇒Sec. 3.2
Classifier
Parameters 𝑤
Data 𝑿
Labels 𝒀
Label
Controller
Parameter 𝜃
Original data
Update
Side param. 𝒕
Loss ℒ
Score 𝑠
Labels 𝒀
𝜽
Justify
Figure 3: Pipeline of proposed learning framework.
Algorithm 1: Label correction function Q.
Input: t = {t
αi
|α = 1, ··· , N. i = 1, ··· , M
α
}
Input: Y = {Y
αi
|α = 1, ··· , N. i = 1, ··· , M
α
}
Input: θ //label flip threshold
Output: Y
θ
//controlled labels
Y
θ
← Y //initialize output
for α = 1 to N do
if Y
αM
α
= 1 then
t
0
← min{t
αi
|∀i s.t. Y
αi
= 1}
for all i s.t. t
αi
≥t
0
−θ do
(Y
θ
)
αi
← 1 //overwrite labels as positive
end for
end if
end for
Therefore, we parameterize the label controller by
threshold θ corresponding to the threshold for the dif-
ference in t. We optimize the threshold θ to achieve
proper correction through θ,
Y
θ
= Q(Y, t|θ), (1)
where Q(·|θ) is a label correction function that flips
the labels of data in the positive series from negative
(i.e., Y = 0) to positive (i.e., Y = 1) on the basis of the
threshold θ as shown in Algorithm 1. Defining the
reference point t
0
of the side parameter as the min-
imum in that of the positive data in each series, the
label controller flips labels of negative data that have
a side parameter t larger than t
0
−θ as shown in Fig.
1.
3.2 Threshold Justification for Label
Control
Next, we explain how we can justify the threshold θ.
We prefer large threshold θ to find more missing pos-
itives, but too large θ lead to label flip for absolute
negatives. Our method searches for the reasonable θ
by checking if θ is too large or not on the basis of the
following idea. Let us denote the set of (X,Y ) as D
and that of (X,Y
θ
) as D
θ
.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
408

When θ exceeds the limit where any positive cues
completely disappear from the negatives in positive
series, the class overlaps in D
θ
will increase. There-
fore, the limit of reasonable θ enlargement can be
detected by the separability of D
θ
such as Fisher’s
discriminant ratio, for example. Figure 4 ilustrates
the dependency of the separability on θ. When θ in-
creases from left to right, negative data next to pos-
itives change their labels to positive. As we can
see in the upper row, the data is linearly separable
only for the smallest θ. Fisher’s discriminant ratio,
i.e. inter-class variance over inner-class variance, be-
comes smaller for larger θ because positive class take
in data around nearly overlapping region.
On the other hand, the models to use may fit more
complex boundaries than that selected by a given sep-
arability metric. We should choose θ that suits the
model, so that it can perform well on D
θ
for assumed
θ. Actually, model’s performance itself reflects the
separability of datasets besides the expressibity of the
model. In this sense, we can use the performance
measure as an adaptive separability score.
1
In this paper, we use the area under curve (AUC)
of the receiver operating characteristic (ROC) curve
for the separability score s for D
θ
. This is be-
cause AUC can fairly compare D
θ
among different
θs, where class popularity changes.
The two rows in Fig. 4 show the comparison be-
tween two models with different expressivities. The
separability score s starts to decrease when θ becomes
too large for each model to fit the decision bound-
ary. The highly expressive model in the bottom row
keeps high s for larger θ than the upper poor model,
but finally drops at the largest θ due to excessive label
flip. The dependency of s to θ used for training can
be found in Fig. 6, which is discussed in Sec. 4.1.2.
3.3 Overall Procedure
Finally, we describe the overall procedure of the pro-
posed method in detail. The proposed method opti-
mizes both classification performance and sensitivity
to positives ignored in original labels. This can be
expressed as the single minimization problem of clas-
sification risk R and the regularization term that en-
larges the threshold θ. Let f
w
: X → R denote the
classifier model parameterized by w,
[
ˆ
θ,
ˆ
w] = argmin
θ,w
{R( f
w
;D
θ
) −βθ}, (2)
1
Note that we should properly regularize the model or
evaluate the separability metric on a validation set separated
from training data, in the case of highly expressive models
such as deep neural networks, which may fit any random
labels (Zhang et al., 2017).
High
High
Low
s: Low
s: High
s: High
s: High
Label sensitivity to positives
θ
s: Low
s: Low
Low
Model expressivity
t
t
t
t
t
t
Figure 4: Examples of AUCs in each situation. Squares and
circles are negative and positive(or latent positive) data, re-
spectively, and color represents assigned label. Dotted lines
link data along series. If the representative power of a model
is weak, positives too difficult to classify should not be cor-
rected (θ should not be too large). When the model is strong
enough, the resulting AUC is always high. Thus, we prefer
larger θ, which means higher sensitivity to positives.
where β is the hyper parameter to balance between
classification risk R and the importance of sensitivity
expressed by the threshold θ. In this paper, a simple
linear form was employed as the regularization
term. Our method is not limited to this form and we
can select regularization term corresponding to the
priority of accuracy or sensitivity. To obtain
ˆ
θ and
ˆ
w,
we employ an alternating optimization approach by
splitting θ update and w update processes.
θ Updating Process: In the optimization of only θ,
we compare risk R before and after a label control.
Note that the minimization of the risk R corresponds
to the maximization of the performance, which can be
regarded as separability score s as described in Sec.
3.2. This optimization for θ is then expressed as fol-
lows:
ˆ
θ = argmin
θ
{R( f
ˆ
w
;D
θ
) −βθ}, (3)
⇒ argmax
θ
{s( f
ˆ
w
,D
θ
) + βθ}. (4)
Since label correction is discontinuous, a simple im-
plementation of this optimization is a grid search.
Here, we assume that original labels are separable
enough for the model to lead to satisfying perfor-
mance. The separability s for the learned model will
start to drop after θ exceeds the separable limit, when
the label control threshold θ increases. In addition,
when starting from small θ, the learning process can
be seen as curriculum learning staarting from discrim-
ination of only easier positives when we use neural
network models and fine-tune them in each step.
Overcoming Labeling Ability for Latent Positives: Automatic Label Correction along Data Series
409

Hence in the proposed method, we increase θ on
the grid and stop if the evaluated risk becomes higher
for temporally optimized w. Then we tune the model
again on the labels corrected by the best θ.
w Updating Process: On the other hand, if θ is fixed,
the optimization of w is the standard supervised learn-
ing on corrected labels.
ˆ
w = argmin
w
R( f
w
;D
ˆ
θ
). (5)
The risk R can be altered by loss function L if you
need to realize this optimization. In our experiment,
we use the cross entropy loss with coefficients in-
versely proportional to class population ratio.
3.3.1 Implementation Details
We set the initial θ as 0, which corresponds to the
original label, and increment it in accordance with a
given grid. In each step, we evaluate the separabil-
ity s on training data, which actually can be altered
by a separated validation set to prevent overfitting, af-
ter training on the labels controlled with current θ. If
the objective is smaller than that in the previous step,
the previous value of θ is adopted as reasonable, and
the threshold search is finished. As a result, the over-
all procedure of our method is shown in Algorithm 2.
The parameter γ, which is slightly smaller than 1, is
introduced to make the stopping condition robust to
the probabilistic deviation in s.
4 EXPERIMENTS
To evaluate the performance of the proposed frame-
work, we generated two types of synthetic datasets .
In the first set in Sec. 4.1, we demonstrate the com-
prehensive results in simplified settings. The second
in Sec. 4.2 is a dataset of rather realistic images to
evaluate the effectiveness of our method and difficulty
for a related work.
4.1 Demonstration on Simple Example
First, we generated point data in two-dimensional
(2D) feature space as a simple example. We con-
ducted demonstrative experiments with the dataset
and Random Forest (Breiman, 2001), which is a com-
monly used classifier for pattern recognition tasks.
4.1.1 Synthetic 2-D Point Dataset
The synthetic data model was designed to simply rep-
resent our assumption for the dataset structure shown
Algorithm 2: Learning by proposed method.
Input: X = {X
αi
|α = 1, ··· , N. i = 1, ··· , M
α
}
Input: t = {t
αi
|α = 1, ··· , N. i = 1, ··· , M
α
}
Input: Y = {Y
αi
|α = 1, ··· , N. i = 1, ··· , M
α
}
Input: w // initial model parameters
Input: binary classifier f
w
: X → R
Input: θ
grid
//grid for θ search
Input: β, γ //hyperparameters for optimization
Output: f
w
,θ //trained model, label correction range
F
be f ore
← −1
initialize objective history
for θ in θ
grid
do
Y
θ
← Q(Y, t|θ)
w ←TRAINMODEL( f
w
,X,Y
θ
)
s ←EVALUATEAUC( f
w
,X,Y
θ
)
if s + βθ < F
be f ore
then
θ ← θ
be f ore
break
else
F
be f ore
← max(γs + βθ,F
be f ore
)
θ
be f ore
← θ
end if
end for
Y
θ
← Q(Y, t|θ)
w ←TRAINMODEL( f
w
,X,Y
θ
)
in Fig. 2. We denote the Gaussian distribution with
mean µ and covariance matrix Σ by N (·|µ, Σ) and N-
dimensional identity matrix by I
N
here.
For all series α, the top data X
α0
among X =
{X
α,i
} are sampled from the same distribution
p(X|t = 0) = N (X|0,σ
2
I) which models the varia-
tion of captured objects. Subsequent data in negative
series are basically the same. In contrast, in positive
series, data start to shift and separate from negative
data as a model function ρ(t). Finally, we add noise
ε to all data corresponding to observation noise mod-
eled p(ε) = N (ε|0,σ
2
I
2
). Resulting data distributions
for the negative and positive series are as follows:
Negativeseries : p(X|t) = N (X|0, 2σ
2
I
2
), (6)
Positiveseries : p(X|t) = N (X|ρ(t)v, 2σ
2
I
2
), (7)
where ρ(t) is the underlying positive appearance
emerging from t = τ, and shift direction v is
(2,−1)/
√
5. Parameters are set as σ = 5 ×10
−2
and
τ = 0.7. The generated dataset has 200 series with
length 24 for t = 0 to 1, half of which are positive se-
ries. We keep 20 % of them as the test set. The whole
dataset is plotted in Fig. 5(a).
4.1.2 Experiment using Random Forests
In this experiment, we applied our method to a Ran-
dom Forest classifier (Breiman, 2001) on 2D point
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
410
Baseline Oracle Exceed Proposed
AUC:0.810
µ = 0
AUC:0.955
µ = 0: 2
AUC:0.933
µ = 1
AUC:0.955
µ =
^
µ
^
µ = 0: 15
AUC:0.955
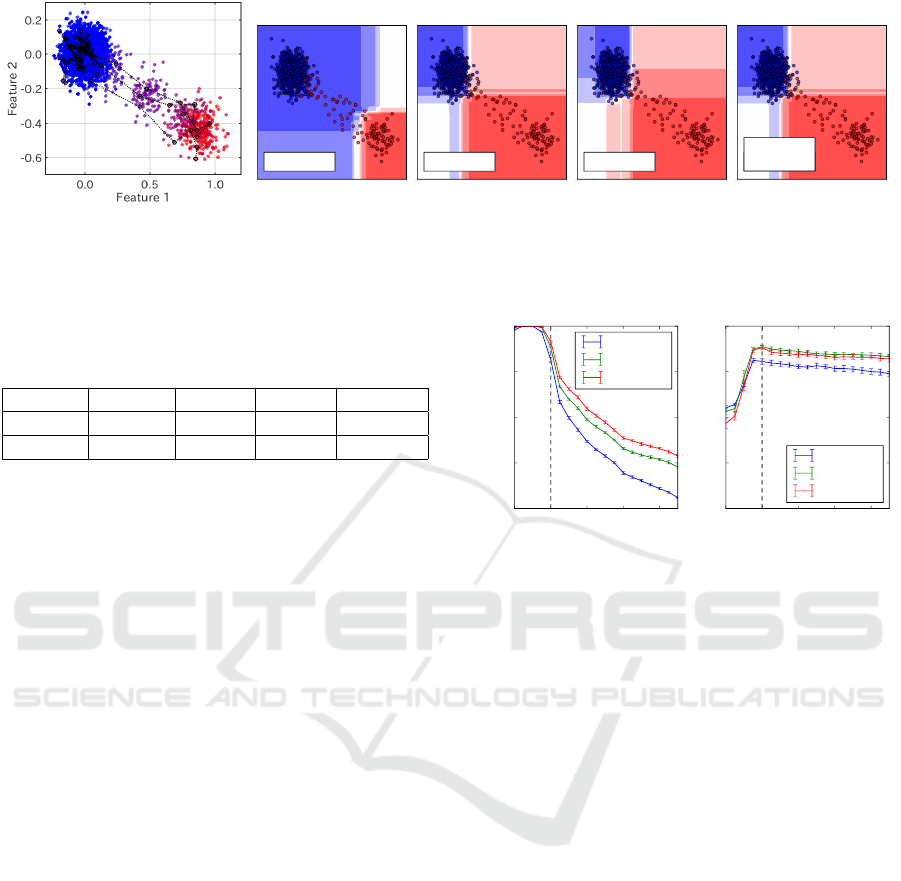
(a) 2D point data (b) Decision surface by each method
Figure 5: (a)Synthesized 2D point data. Positive series were plotted in red if labeled positive and otherwise in intermediate
color to indicate separation level. Three series are connected with dotted lines to indicate data structure. (b)Decision surface
of each method on synthesized 2D data. Plotted data are only that in test set. Each plot shows one of results for each method.
Table 1: Test performance on 2D point data for each
method. All results are averaged over 20 runs. “Acc.”
means the accuracy.
Baseline Oracle Exceed Proposed
AUC(%) 81.2(7) 95.5(3) 93.3(5) 95.4(4)
Acc.(%) 93.2(2) 95.8(2) 91(5) 95.8(3)
data described above. We compared our method
with the following three baselines that are supervised
learning using different labels: 1) Baseline: original
labels, 2) Oracle: perfect labels made by the knowl-
edge about data generation (upper limit), and 3) Ex-
ceed: labels where positive labels are extended over
all data in positive series. Original labels was made
on the assumption that annotators could find positives
after t ≥ 0.9. In this experiment, the number of trees
is set to 8, and the depth of each tree is 3 at most.
The optimization parameters are set to γ = 0.99 and
β = 1.0. Here, each forest is trained 20 times by dif-
ferent random seeds for each method.
The results are summarized in Table 1. Figure 5(b)
shows one of resulting decision boundaries. These
results show our method has reached almost the same
performance as the oracle case in terms of AUC, with
the help of series information additional to baseline
labels. Furthermore, our method was better than the
exceed case, which also uses the series structure for
label improvement, which means the threshold search
on side information works well.
We also checked the separability score s and re-
sulting performance for each θ value to assess our
method. Figure 6 shows measured s on train data
and AUC on test data, when trained on labels con-
trolled with different thresholds θ. The evaluation of
AUC values used oracle labels for test data, and con-
troled labels for training data. We can see that AUC
decreased around the true threshold corresponding to
oracle labels for training data, and then our method
finds that point. These results show that 1) the AUC
is a suitable index for the separability score s in Sec.
3.1, and 2) the proposed procedure in Sec. 3.2 (and
0.0 0.2 0.4 0.6 0.8
Assumed threshold µ
0.6
0.7
0.8
0.9
1.0
Score s on train data
Oracle thresholdOracle thresholdOracle threshold
depth=1
depth=3
depth=5
0.0 0.2 0.4 0.6 0.8
Assumed threshold µ
0.6
0.7
0.8
0.9
1.0
AUC on test data
Oracle thresholdOracle thresholdOracle threshold
depth=1
depth=3
depth=5
Figure 6: Separability score s and performance for Random
Forests trained under label control by different thresholds
θ. The parameter depth shown in legend refers to the maxi-
mum depth of trees in Random Forests.
Algorithm 2) can correct the label so that the recogni-
tion performance becomes high on the test set with la-
bels assigned in the same criterion as the oracle case.
Note that our synthetic data are not completely sepa-
rable for oracle labels, which is why the AUC starts
to drop at a larger threshold than the true one.
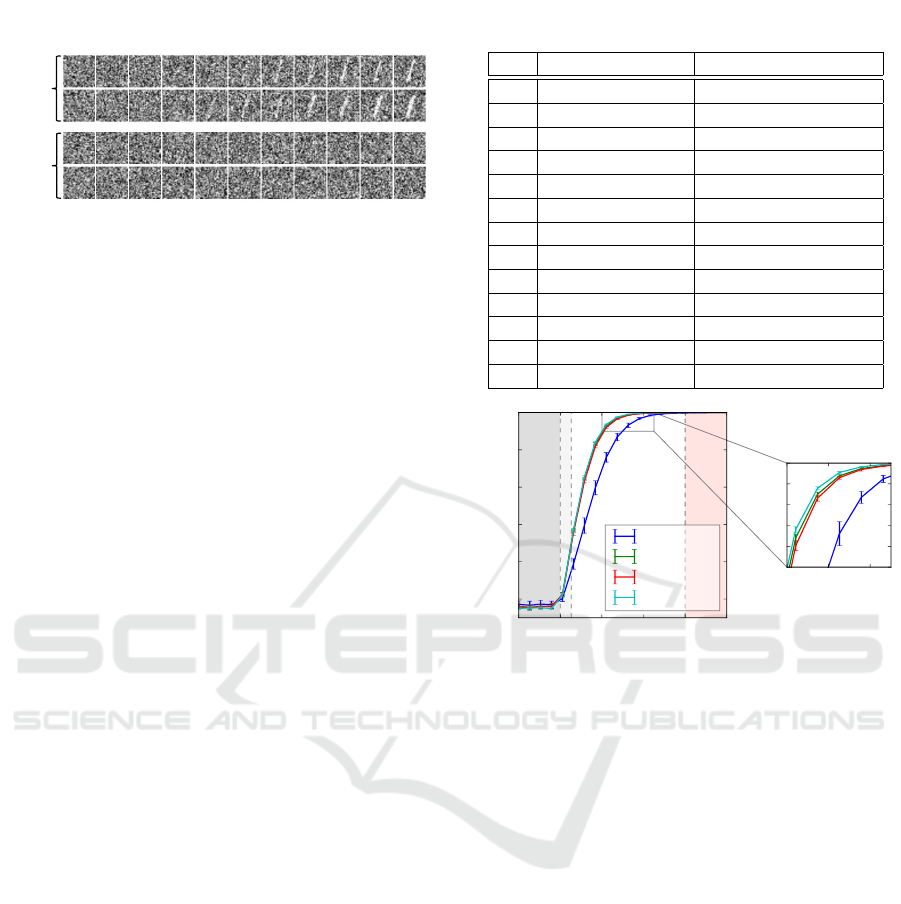
4.2 Demonstration on Realistic Dataset
For a more realistic example, we generated an image
dataset using “1” data of the MNIST handwritten digit
dataset to imitate scraches that should be detected in
a surface inspection. Positive series are designed to
represent images capturing scraches with increasing
contrast as lightening condition changes.
4.2.1 Synthetic Scratch Images with Varying
Contrast
All data in negative series share the same distribution.
Each data in negative series is noise image I
noise
gen-
erated from a simple Gaussian, which can be seen as
clean surfaces. On the other hand, the data in posi-
tive series are made by overlaying “1” images J on
I
noise
with the fraction of J increasing along series for
t > τ. Resulting data distributions for the negative and
Overcoming Labeling Ability for Latent Positives: Automatic Label Correction along Data Series
411
𝑡 = 0
1.00.90.1 0.2 0.3 0.50.4 0.6 0.7 0.8
Positive
series
Negative
series
Side
param.
Figure 7: Synthetic image data made by overlaying MNIST
“1” data to random noises. Upper two rows are negative
series, and the rest are positive series. The side parameter
increases from left to right and positive label is assigned to
data with t ≥ 0.8.
positive series are as follows:
Negativeseries : X(t) = I
noise
, (8)
Positiveseries : X(t) = I
noise
+ ρ(t) ·J, (9)
where ρ(t) = 0.5 ×max(0,(t −τ)(1 −τ)), 0 ≤ t ≤ 1
and τ = 0.2 in this experiment. Figure 7 shows exam-
ples generated from this model. The train set and test
set are made following the seed “1” images from the
train set and test set of MNIST dataset.
4.2.2 Experiment using CNN
Next, we evaluated our method applied to a convo-
lutional neural network (CNN) model on synthetic
scrach images.
Comparison methods are the same as in the above
experiment; 1) Baseline, 2) Oracle, and 3) Exceed.
The model used here was a simple CNN with archi-
tecture in Table 2. All convolutional layers were set to
pad=1 and stride=1 and with batch normalization be-
fore ReLU activation. The networks were trained by
momentum SGD with minibatch size 40, learning rate
0.001, moment 0.9, and weight decay 0.0005. Opti-
mization parameters of our method are set to γ = 0.99
and β = 0.2. For all methods, we ran training 20 times
using different random seeds.
We evaluated the model trained by our method in
terms of AUC on the test set. In this experiment, we
tested AUCs at each point of a series to compare sen-
sitivities to latent positives, using test data generated
at a single fraction of J for positive series. In this eval-
uation, positive series data are all labeled as positive.
As shown in Fig. 8, our method shows high per-
formance over a wider range than the baseline. More-
over, our method achieved almost the same perfor-
mance as supervision by the oracle labels. In addi-
tion, we can see our method obtains slightly better
results even than oracle in the separable region. This
is due to the existence of overlap between class distri-
butions, and the result by the exceed was affected by
more overlaps.
Table 2: CNN architecture used in our experiment.
layer type description
in image 1 channel
1 convolution 3 ×3, 16 channels
2 convolution 3 ×3, 16 channels
pooling, dropout 2 ×2, drop ratio=0.2
3 convolution 3 ×3, 32 channels
4 convolution 3 ×3, 32 channels
pooling, dropout 2 ×2, drop ratio=0.2
5 convolution 3 ×3, 64 channels
6 convolution 3 ×3, 64 channels
pooling, dropout 2 ×2, drop ratio=0.2
7 fully connected 32 units
8 fully connected 2 units
out softmax
0.0 0.2 0.4 0.6 0.8 1.0
Side parameter t
0.5
0.6
0.7
0.8
0.9
1.0
AUC
t = t
0
predicted
oracle
Baseline
Oracle
Exceed
Proposed
0.4 0.5 0.6
0.95
0.96
0.97
0.98
0.99
1.00
Figure 8: AUCs on test images for proposed and baseline
methods.
4.2.3 Comparison with Existing Method
Finally, we compared the proposed method with the
existing method (Tanaka et al., 2018) that can learn
from incorrect labels, which does not use series in-
formation of the data. Figure 9 shows the existing
method result applied to base CNN used here. The
performance was better than the baseline case but not
as good as ours. This is because the existing method
modify labels not to find latent positives but to make
decision boundary consistent. These results show
that 1) the proposed method outperforms the existing
method, and 2) the use of the series information is ef-
fective for label correction.
5 CONCLUSION
In this paper, we have proposed a learning frame-
work to overcome the limitation of model perfor-
mance by the annotating ability at preparing training
data. The proposed method utilizes the relationship
between data observing common objects and corrects
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
412
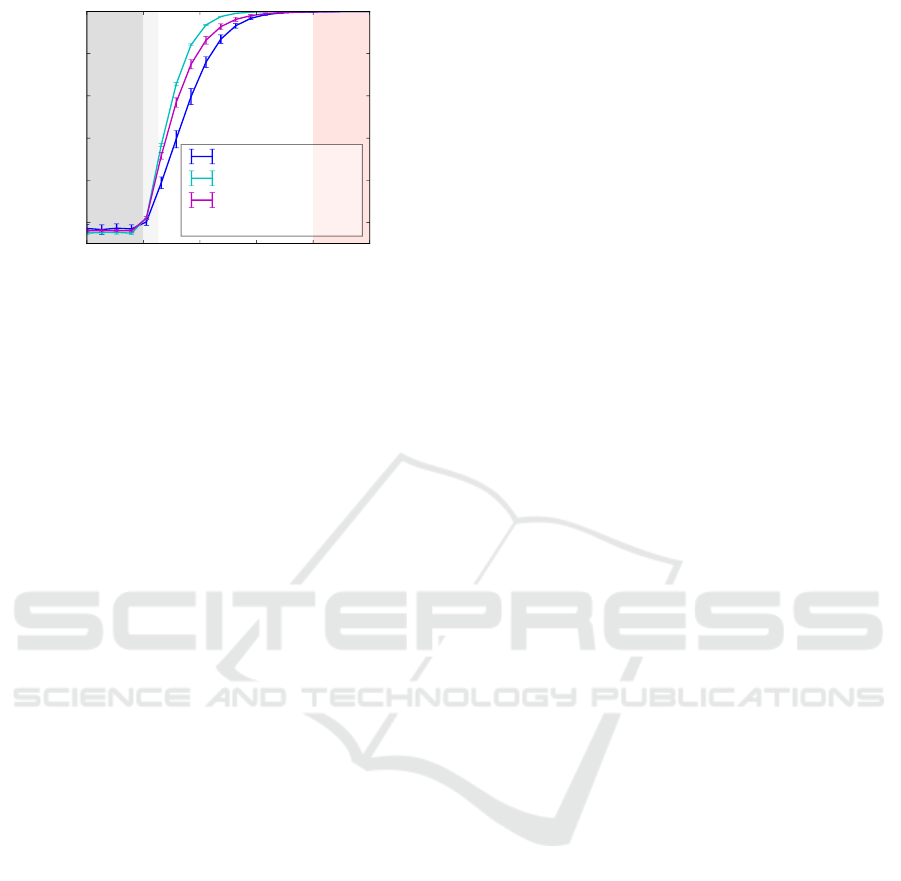
0.0 0.2 0.4 0.6 0.8 1.0
Side parameter t
0.5
0.6
0.7
0.8
0.9
1.0
AUC
Baseline
Proposed
JointOptimization
(Tanaka+, 2018)
Figure 9: AUCs on test images compared with (Tanaka
et al., 2018). The treatment as simple label noise failed to
correct labels in the preferable way for our settings.
labels along such series. Experiments on synthesized
datasets showed that our method achieved the same
performance as supervision by oracle labels, which
is the most sensitive to positive data, not limited by
given annotation ability.
Our method enables us to get models that can find
earlier anomalies than annotators by searching for dis-
criminative cues back to the earlier phase. In addition,
this can utilize poor labels made by simple processing
such as thresholding or by other classifiers.
REFERENCES
Arpit, D., Jastrzebski, S., Ballas, N., Krueger, D., Bengio,
E., Kanwal, M. S., Maharaj, T., Fischer, A., Courville,
A., Bengio, Y., and Lacoste-Julien, S. (2017). A closer
look at memorization in deep networks. In 34th Inter-
national Conference on Machine Learning (ICML).
Breiman, L. (2001). Random forests. In Machine Learning.
Goldberger, J. and Ben-Reuven, E. (2017). Training deep
neural-networks using a noise adaptation layer. In
ICLR, 5th International Conference on Learning Rep-
resentations.
Jindal, I., Nokleby, M., and Chen, X. (2016). Learning
deep networks from noisy labels with dropout regu-
larization. In 16th International Conference on Data
Mining (ICDM). IEEE.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In 26th Annual Conference on Neural In-
formation Processing Systems (NIPS).
Li, Y., Yang, J., Song, Y., Cao, L., Luo, J., and Li, L.-J.
(2017). Toward robustness against label noise in train-
ing deep discriminative neural networks. In Interna-
tional Conference on Computer Vision (ICCV).
Ma, X., Wang, Y., Houle, M. E., Zhou, S., Erfani,
S. M., Xia, S.-T., Wijewickrema, S., and Bailey, J.
(2018). Dimensionality-driven learning with noisy la-
bels. IEEE.
Patrini, G., Rozza, A., Menon, A. K., Nock, R., and Qu, L.
(2017). Making deep neural networks robust to label
noise: a loss correction approach. In Computer Vision
and Pattern Recognition (CVPR).
Reed, S. E., Lee, H., Anguelov, D., Szegedy, C., Erhan, D.,
and Rabinovich, A. (2015). Training deep neural net-
works on noisy labels with bootstrapping. In ICLR, In-
ternational Conference on Learning Representations.
Sukhbaatar, S., Bruna, J., Paluri, M., Bourdev, L., and Fer-
gus, R. (2015). Training convolutional networks with
noisy labels. In ICLR, International Conference on
Learning Representations.
Tanaka, D., Ikami, D., Yamasaki, T., and Aizawa, K.
(2018). Joint optimization framework for learning
with noisy labels. In Computer Vision and Pattern
Recognition (CVPR).
Vahdat, A. (2017). Toward robustness against label noise
in training deep discriminative neural networks. In
Neural Information Processing Systems (NIPS).
Veit, A., Alldrin, N., Chechik, G., Krasin, I., Gupta, A.,
and Belongie, S. (2017). Learning from noisy large-
scale datasets with minimal supervision. In Computer
Vision and Pattern Recognition (CVPR).
Wang, Y., Liu, W., Ma, X., Bailey, J., Zha, H., Song, L.,
and Xia, S.-T. (2018). Iterative learning with open-set
noisy labels. In Computer Vision and Pattern Recog-
nition (CVPR).
Xiao, T., Xia, T., Yang, Y., Huang, C., and Wang, X. (2015).
Learning from massive noisy labeled data for image
classification. In Computer Vision and Pattern Recog-
nition (CVPR).
Zhang, C., Bengio, S., Hardt, M., Recht, B., and Vinyals, O.
(2017). Understanding deep learning requires rethink-
ing generalization. In ICLR, International Conference
on Learning Representations.
Overcoming Labeling Ability for Latent Positives: Automatic Label Correction along Data Series
413
