
Sea Keeping Performance Investigation of Cylindrical Floating
Production Storage and Offloading (FPSO) on the Indonesian
Offshore Environment
Sarjito Joko Sisworo
1
, Aulia Windyandari
2
and Ahmad Fauzan Zakki
1
1
Naval Architecture Department, Engineering Faculty, Diponegoro University, Indonesia
2
Industrial Technology Department, School of Vocation, Diponegoro University, Indonesia
Keywords: Sea Keeping, FPSO, Natuna Island.
Abstract: The Natuna Islands have the largest natural gas reserves in the Asia Pacific region even in the World. To
explore the hydrocarbon reserves that are scattered in many points, the FPSO is one of the alternative
choices that investors are interested. The FPSO investment is more efficient than FSO, because the FPSO is
a mobile system that able to carry out a reliable production processes and operation. The technological
revolution in the FPSO has shown a significant improvement through the development of cylindrical shaped
FPSO instead of ship shaped FPSO. In this study, the research is focused on the numerical investigations to
obtain sea keeping performance of cylindrical FPSO which have an alternative bottom shape design in the
Indonesia sea environment. By considering the results of the analysis of the ship's FPSO motion
characteristics (Ship Shaped FPSO) and the JONSWAP wave spectrum, the operability analysis of the
FPSO cylinder was performed to determine the relationship between the FPSO cylinder motion
characteristics and the ability to operate at the sea, and concerning the specified operating criteria. Heave
and roll motion performance will be discussed in this study.
1 INTRODUCTION
FPSO (Floating Production Storage and Offloading)
is a facility on a floating building that is operated in
offshore oil and gas field that functions to receive,
process, store and distribute hydrocarbons that are
permanently tethered to where it operates and can be
moved from one place to another place. Based on
the shape of the building, the FPSO is divided into
two kinds of types that consist of a ship shaped and a
cylindrical shaped vessel.
The first time, the barge shaped FPSO was
dedicated by Arco, that is used in the Ardjuna field
and it is operated at a depth of 42.7 meters in the
Java Sea offshore in 1976 (D’Souza et.al, 1994).
Then, it is followed by the Castellon FPSO in the
offshore Spain which was using a tanker shaped
design that would be operated for a 10-years field
life in 1977. As the increasing demand for oil-gas
and for exploration cost efficiency, nowadays the
operating FPSO is designed to support the field
exploration with return period of waves for the
longitudinal strength design as 100 years (Paik and
Thayamballi, 2007).
In 2007, the first cylindrical FPSO in the world is
introduced as the Sevan Piranema FPSO. The
cylindrical FPSO is developed by Sevan Marine
which operated in the offshore Brazil with the
design of operations in ultra-deep waters, ranging
from 1000 m - 1600 m (Paik and Thayamballi,
2007)., see Fig. 1. Then it is followed by the
construction of other cylindrical FPSOs, including:
FPSO Hummingbird, FPSO Voyageur and FPSO
Goliath.
Although the FPSO have shown good
performance, however, in the last decades the
performance limitations was observed for FPSO
with the traditional ship shaped type and cylindrical
shaped FPSO (Wang and Feng, 2011; WU, 2012).
Ship shaped FPSO is significantly sensitive to the
wave direction. These kind of characteristics might
cause poor performance on FPSO heave and roll
motion in the oblique wave condition which is FPSO
usually being operated with the single point mooring
system. Since ship shaped have significantly large
Sisworo, S., Windyandari, A. and Zakki, A.
Sea Keeping Performance Investigation of Cylindrical Floating Production Storage and Offloading (FPSO) on the Indonesian Offshore Environment.
DOI: 10.5220/0008565901530158
In Proceedings of the 6th International Seminar on Ocean and Coastal Engineering, Environmental and Natural Disaster Management (ISOCEEN 2018), pages 153-158
ISBN: 978-989-758-455-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
153

longitudinal scale, the wave impact and green water
load might be occurred and possible to damage the
deck structure. Moreover, the turret structure also
vulnerable because of the excessive yaw motion
which is generated by the vane effect. The bending
moment of hogging and sagging may cause fatigue
failure and severe deformation in the ship shaped
FPSO. In the case of cylindrical shaped, the heave
motion response is significantly large because of the
natural period of heave motion is centralized in the
area of wave energy.
Based on the condition, this paper is focused on
the investigation of sea keeping performance of
cylindrical FPSO which influenced by the
modification of the geometry of bottom shape
design. The modification of the bottom shape
geometry is conducted by adopting the disc shaped
for the skirt design to improve the heave motion
characteristics. Furthermore, the sea keeping
characteristics of the proposed design is investigated
and compared with the sevan piranema performance.
Figure 1: The cylindrical shaped FPSO developed by
Sevan Marine.
2 MATERIAL AND METHODS
2.1 Literature Review
Recently, several new concepts design of the
offshore structures are proposed to improve the sea
worthiness and motion characteristics to support the
exploration activities on the wave environment.
Some literature could be found for the development
of marine structure design that was made to improve
the heave motion performance of the cylindrical
FPSO. Goncalves, et. al., (2009) was developed the
concept design of Mono column Production Storage
and Offloading System (MPSO) to reduce the
motion, to maintain the storage capability and have
the ability to facilitate the use of rigid risers. The
MPSO adopted an auxiliary apparatus which consist
of moon pool, beach, skirt and spoiler plates to
minimize the vertical motion. The developed MPSO
design provides the best solution for the exploration
field in the pre-salt area of Brazil. In the other study,
Goncalves, et al., (2010), develop the new concept
for MPSO by combining two functional as great oil
storage capacity and dry tree production capability.
The results show that the decreasing vertical motion
could be achieved by implementing the appropriate
appendages to the platform. The experimental
comparative study on Vortex Induced Motion of a
Mono column platform also investigated by
Goncalvez, et. al. for the design of MPSO in the
Gulf of Mexico (2012).
Besides the cylindrical FPSO of sevan
technology and MPSO, a sandglass type ocean
engineering floating structure is introduced by
Huang et. al. (2013). The sand glass type is provided
with an inversed truncated cone as the upper body,
and a regular frustum or truncated cone for the lower
body. Wang, et. al. was made a numerical and
experimental analysis on the motion performance of
the new sandglass-type floating body in waves
(Wang, et.al, 2016). The study was found that the
sandglass-type design able to improve the
hydrodynamic performance of FPSO.
Figure 2: The geometry of cylindrical FPSO: (a) original
sevan technology design; (b) modified design with the
Disc Shaped skirt geometry.
ISOCEEN 2018 - 6th International Seminar on Ocean and Coastal Engineering, Environmental and Natural Disaster Management
154
2.2 Modification of the Cylindrical
FPSO Hull Form
The modification of cylindrical FPSO is made by
modifying the bottom design of the existing hull
form design. Therefore the principal dimension was
adopted from the previous hull form design data that
might be seen on the Table 1. Since the principal
dimension was determined, the next step is to
modify the skirt design of the bottom of cylindrical
FPSO. The previous skirt design of the cylindrical
FPSO has the thin truncated frustum shape and the
flap fin is attached at the tip of the frustum, see Fig.
2(a). The flap and the frustum shape are subjected to
reduce the heave motion and vertical acceleration.
In the process of modification, the bottom shape
of the FPSO was changes with the adoption of the
thick disc shaped for the skirt design; see Fig 2(b).
The larger volume of the thick disc shape is
considered able to increase the added mass of the
cylindrical FPSO. Therefore it is expected that the
modification might reduce the vertical acceleration
induced by wave force in the offshore environment.
The influence of the design modification to the
motion performance would be investigated using
strip theory method for the sea keeping analysis. The
sea keeping analysis is performed with the wave
spectrum that is defined for the Indonesian offshore
environment.
Table 1: Principal Dimension of the Cylindrical FPSO.
Parameters Dimension
Hull Diameter 93 m
Bilge Box Diameter 124 m
Bilge Box Plate Diameter 138 m
Main Deck Diameter 103 m
Process Deck Diameter 109 m
Main Deck Diameter 42 m
Process Deck Diameter 48 m
Draft, Ballast 22 m
Draft Loaded 31 m
Constant Draft 27 m
Freeboard to Ballast 20 m
Freeboard to Loaded 11 m
2.3 Wave Spectrum and the Offshore
Condition
In this study the wave spectra used are the ITTC
wave spectra with 2 corresponding parameters in Eq.
1. The significant wave variations (Hs) used were 3
m, 2.5 m, 2 m, and 1.5 m with the Average Period
(Tav) variation of 6.09 seconds, 5.60 seconds, 4.82
seconds and 3.70 seconds. This seawaters condition
is categorized as moderate waters or sea state
number 4.
S
ITTCϛ
(ω) =
45
exp
BA
(1)
where:
ω = wave frequency (rad/s); A = 172.75
4
2
ave
S
T
H
; B =
4
691
ave
T
The wave spectrum (Sω) generated from Eq. 1
significantly depends on the value of the wave
frequency. As a result of the influence of floating
body speed and the angle of attack of the wave, the
frequency of the incident wave (ωw) will change to
the encountering wave frequency (ωe). This
encountering wave is used to make the encountering
wave spectra (Se). To calculate the encountering
wave frequency, Eq. 2 might be used.
ω
e
= ω
cos1
g
V
(2)
where:
ωe = encountering waves frequency (rad/s)
ωw = wave frequency (rad/s)
V = ship speed (m/s)
g = gravity acceleration (9.81 m/s2)
The offshore conditions in this study refer to the
conditions (Sea State Code) that have been
determined by WMO (World Meteorological
Organization) on the review of three variations of
sea conditions with different parameters covering
the highest third of wave height (significant wave
height), wave period, and wind speed (Sustained
Wind Speed). Variations in offshore conditions are
small waves (Slight), moderate waves (Moderate),
and large waves (Rough), see Table 2.
North Offshore Natuna-Indonesia is identified as
a sea waters with medium wave height. Based on
data from the Climatology and Geophysics
Meteorology Agency, North Offshore Natuna-
Indonesia has an average wave height of 1.0 m - 2.0
m with a maximum wave height of 2 m - 3 m. The
average wind speed in the Java Sea is 15 knots - 20
knots.
Sea Keeping Performance Investigation of Cylindrical Floating Production Storage and Offloading (FPSO) on the Indonesian Offshore
Environment
155
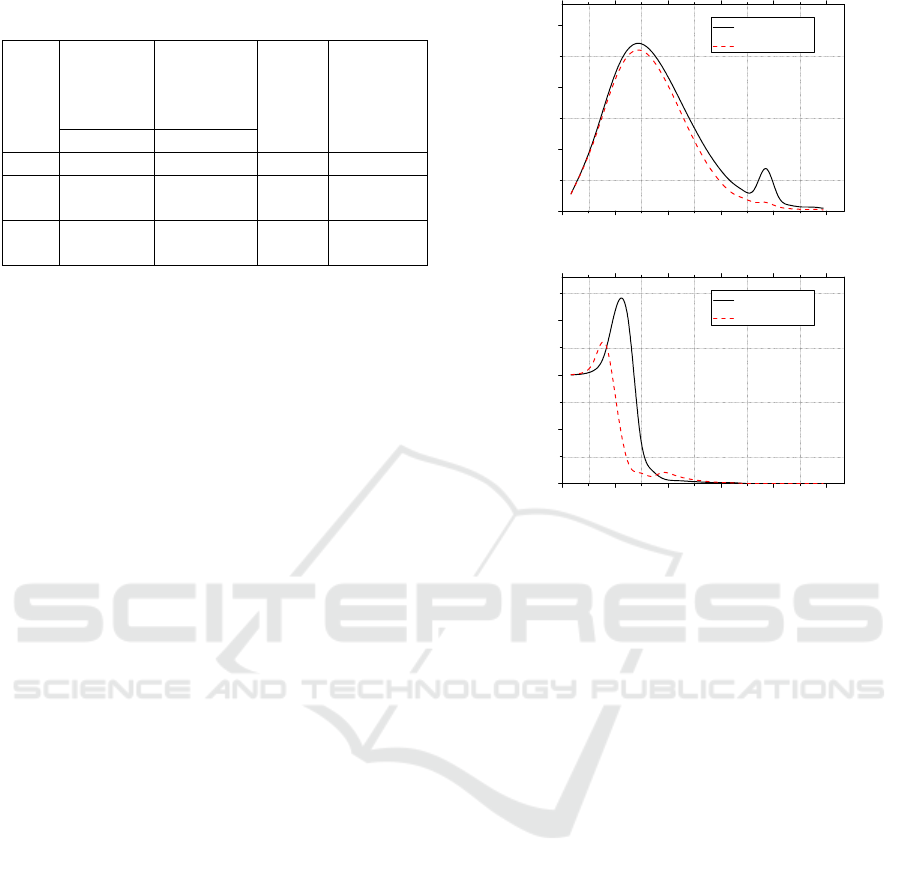
Table 2: World Meteorological Organization Sea State
Code.
Sea
State
Code
Sustained
Wave
Height
(H
1/3
) (m)
Sustained
Wind
Height
(knots )
Wave
Period
(s)
Description
Range Range
3 0,5 – 1,25 11 – 16 7,5 Slight water
4 1,25 – 2,5 17 – 21 8,8 Moderate
water
5 2,5 - 4 22 – 27 9,7 Rough
water
3 RESULTS AND DISCUSSIONS
Evaluation of the performance of a floating body
depends on the environment condition. This
environment is being expressed in the form of a
wave spectrum. Based on the FPSO environment
condition, namely in the North Natuna Offshore
Indonesia, the ITTC wave spectrum will be adopted
for this research, by regarding that recently the
offshore environment are considered more
dangerous than 20 years ago. In the sea keeping
analysis, it is consisted of three categories of
problems that are included:
1. Estimation of environmental conditions
which is applied to the FPSO model
2. Prediction of the response characteristics of
the FPSO model
3. Specification of criteria that is used to assess
the behavior of FPSO motion.
The performance assessment also can be done by
comparing with the other FPSO. The comparison of
the two FPSO designs or reviewing a design against
the predetermined acceptance criteria depends on
accurate information from the three categories.
In this study, the evaluation of motion was
carried out to get varied movements from the bottom
design configuration. Comparison between the two
designs of the FPSO Sevan Piranema with several
types of bottom variations is done to find out the
advantages and disadvantages of the behavior of one
another. This is needed in providing a bottom design
recommendation that is better for use on cylinder
FPSO. The acceptance criteria for floating body
performance are determined in NORDFORSK 1987
and the operating criteria are adopted from the
operability criteria for the Essar Wildcat.
0.0 0.3 0.6 0.9 1.2 1.5
0.00
0.15
0.30
0.45
Pitch Motion RAO
Encounter Frequency (Rad/S)
Disc-Shape
Original
0.0 0.3 0.6 0.9 1.2 1.5
0.0
0.5
1.0
1.5
Heave Motion RAO
Encounter Frequency (Rad/S)
Disc-Shape
Original
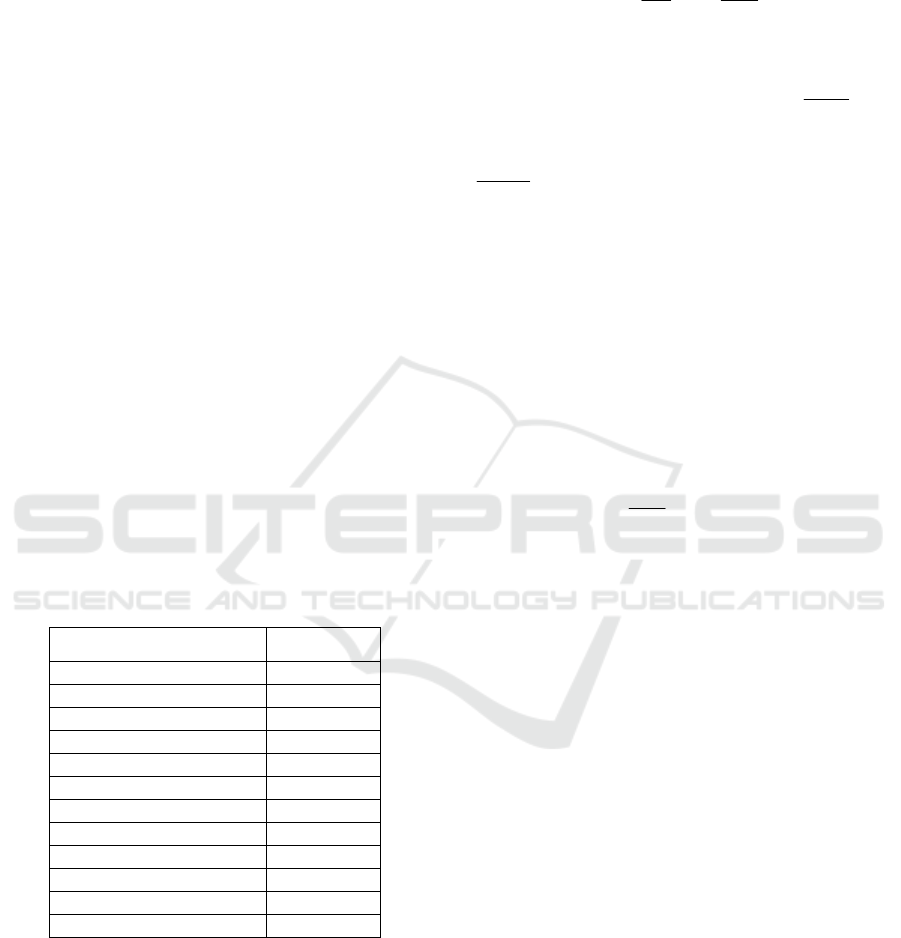
Figure 3: The FPSO Response Amplitude Operator: Heave
Motion (Top); Pitch Motion (Bottom).
Motion analysis is calculated using
hydrodynamic diffraction method. The results of the
analysis of the ship motion are divided into several
parts, namely:
1. Response Amplitude Operator (RAO) from
heave and pitch motion
2. Wave spectra of the North Natuna Offshore
Indonesia
3. Vertical acceleration of the two FPSO design
The results of this motion analysis that are
represented in the form of Response Amplitude
Operator graphics for heave and pitch can be seen in
Fig. 3.
It can be observed that the motion characteristics
of the two cylinder FPSO model have a fairly small
rotational motion (pitch). The Disc Shape Skirt
design has a larger rotational motion compared with
the original FPSO model. This is caused by
differences in geometry configuration, and bottom
dimension size, that gives a difference in the cross-
sectional area of the structure that might be
influenced by sea waves, which in turn gives
different characteristics of motion. In heave motion
RAO, it can be seen that Original Model has the
higher maximum value of 3.84 m/m, at the
encounter frequency of 0.31 rad/s. In pitch motion
RAO, the higher maximum value is obtained in the
ISOCEEN 2018 - 6th International Seminar on Ocean and Coastal Engineering, Environmental and Natural Disaster Management
156
Disc Shape Model with the magnitude of RAO is
0.41 deg./m, at the encounter frequency of 0.44
rad/s.
0.0 0.3 0.6 0.9 1.2 1.5
0.0
0.3
0.6
0.9
S
Wave encounter frequency (Rad/S)
1.5m
2.0m
2.5m
3.0m
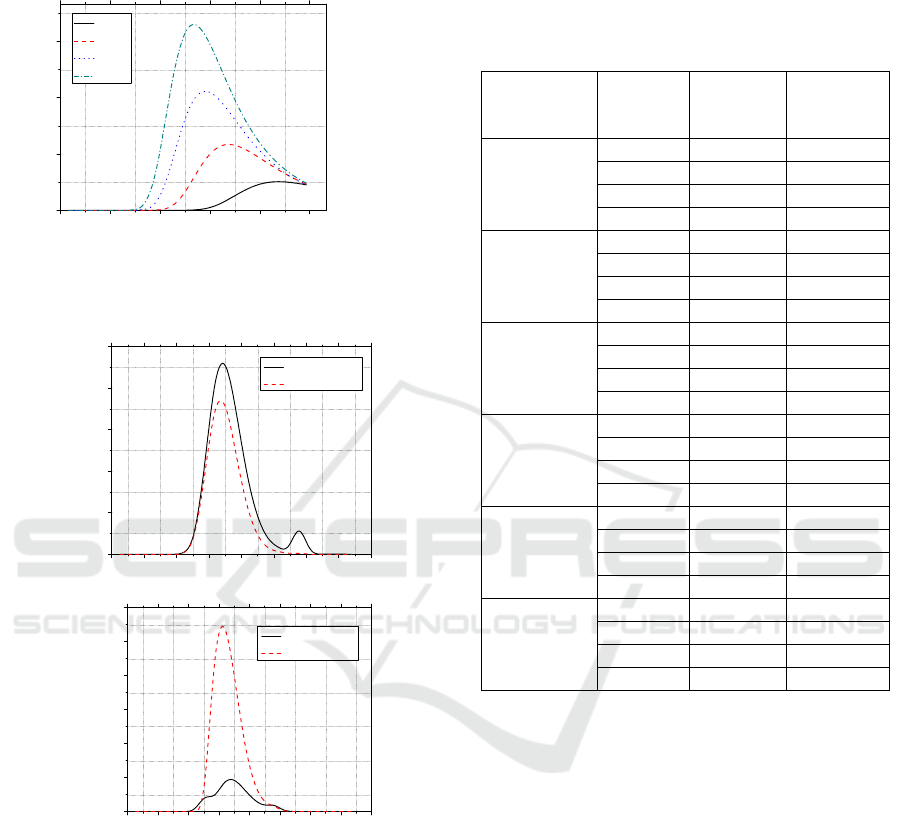
Figure 4: The wave spectrum of the North Natuna
Offshore Indonesia.
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
0.00
0.01
0.02
0.03
0.04
0.05
Pitch Response Spectrum
Wave encounter frequency (Rad/S)
Disc-Shape
Original
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6
0.0000
0.0005
0.0010
0.0015
0.0020
0.0025
0.0030
Heave Response Spectrum
Wave encounter frequency (Rad/S)
Disc-Shape
Original
Figure 5: The FPSO Motion Response Spectrum: Heave
Motion (Top); Pitch Motion (Bottom).
The spectral peak period distribution in the North
Natuna Offshore Indonesia has a range between 3.70
s - 6.09 s and the range of significant wave height
(Hs) is between 1.5 m - 3 m. Each peak period
consists of certain variations (Hs). Fig. 4 shows the
wave energy spectrum of the North Natuna Offshore
Indonesia in each period using the ITTC formula.
Response spectra were obtained after multiplying
the wave spectra with RAO. In this response spectra
computation, it is only conducted on the fluctuation
of heave and pitch motion modes that are conformed
to the operating criteria requirements. The response
spectra of the heave and pitch motion of the two
FPSO is shown in Fig. 5.
Table 3: Heave and Pitch Motion of the two FPSO.
Motion
Parameters
Significant
Wave
Height
Original
Cylindrical
FPSO
Disc-
Shaped
Skirt FPSO
Heave
Amplitude
3.0 m 0.023856 0.011821
2.5 m 0.013845 0.007178
2.0 m 0.005046 0.003330
1.5 m 0.000638 0.000647
Heave
Velocity
3.0 m 0.015973 0.008199
2.5 m 0.009775 0.005449
2.0 m 0.003996 0.002821
1.5 m 0.000596 0.000630
Heave
Acceleration
3.0 m 0.011035 0.006039
2.5 m 0.007131 0.004315
2.0 m 0.003249 0.002458
1.5 m 0.000564 0.000624
Pitch
Amplitude
3.0 m 0.094705 0.112535
2.5 m 0.059676 0.075440
2.0 m 0.025725 0.040202
1.5 m 0.004886 0.016221
Pitch Velocity
3.0 m 0.066637 0.084585
2.5 m 0.044356 0.061391
2.0 m 0.021307 0.038427
1.5 m 0.005086 0.018422
Pitch
Acceleration
3.0 m 0.048786 0.069121
2.5 m 0.034267 0.054329
2.0 m 0.018336 0.039073
1.5 m 0.005449 0.021085
The area under the response spectra curve for
each motion needs to be obtained, since it would be
used to find the statistical value of each movement
as the next procedure. Furthermore, significant
amplitude values and average amplitude can be
obtained for each FPSO design. The calculation
results can be seen in Table 3. The value of the
amplitude of the average movement response in each
movement is correlated with the operating criteria,
to obtain operability in each period and significant
wave height.
From the analysis results, it is show that the
Disc-Shape Cylindrical FPSO model has a different
motion acceleration compare with the original
model. The Disc-Shape model has a 45.27% lower
heave motion acceleration compare with the original
model. However the pitch acceleration of Disc-
Shape model is 41.68% higher than the Original
Model. It is indicated that the Disc Shape model is
an effective damper for the translation acceleration,
Sea Keeping Performance Investigation of Cylindrical Floating Production Storage and Offloading (FPSO) on the Indonesian Offshore
Environment
157

otherwise the original model have a better rotational
damper. It might be explained that the original
model have the flap skirt that is able to reduce the
rotational motion.
According to the acceptance criteria for the
operational requirement of the two FPSO, it can be
seen that the motion amplitude of both FPSO
variation models, for heave and pitch, up to the
highest significant wave height, are comply with the
NORDFORSK 1987 and the Essar Wildcat criteria,
see Table 4 and Table 5. Although in the Disc Shape
FPSO model have larger maximum RAO than
original model, the Disc Shape model generally
shows better heave motion response than the original
model, because of the wave spectrum have a small
value at the range of encounter frequency of 0.5-0.8
rad/s.
Table 4: NORDFORSK 1987 operability criteria.
Description RMS Vertical Acceleration
Light Manual Work 0.20 g
Heavy Manual Work 0.15 g
Intellectual Work 0.10 g
Transit Passengers 0.05 g
Cruise Liner 0.02 g
Table 5: Essar Wildcat operability criteria.
Operation Heave
Pitch/Roll
Single
Amplitude
Operability
0,2 g
(m/s
2
)
-
Land BOP on Wellhead 2.4 m 2.5 deg
Running BOP 4.6 m 2.5 deg
Running Casing 4.6 m 2.5 deg
Disconnect Riser 5.5 m 2.5 deg
Drilling or Tripping 4.6 m 2.5 deg
Hang-off 2.2 m 2.5 deg
Cementing 2.2 m 2.5 deg
Crane Operation 5.5 m 3 deg
End of Self Propelled Transit - 3 deg
Helicopter 5.5 m -
4 CONCLUSIONS
From the overall analysis results, it is obtained that
the heave and pitch motion characteristics of the two
FPSO design on the highest significant wave height
is comply with the operability criteria. It is indicated
that all of the design is reliable to be adopted for the
offshore exploration activities at the North Natuna
offshore Indonesia.
The Disc Shape design have larger heave motion
RAO than original design, however the Disc Shape
shows better heave motion response. It might be
explained that the maximum RAO of the two FPSO
design is occurred on the frequency which the wave
spectrum have very small magnitude. Since the Disc
Shape has shown larger RAO, the application of the
Disc Design should be thoroughly assessed by
considering the experimental studies. In the case of
pitch motion, the original design shows better
motion response characteristics than the Disc-Shape
design. It is indicated that the flap of the skirt was
effectively able to reduce the pitch acceleration of
the FPSO
REFERENCES
J.K. Paik, A.K. Thayamballi, 2007. Ship-Shaped Offshore
Installations, Cambridge Univ. Press, New York.
J.M. Wu, 2012. Ship Eng. 34, 2.
R.B. D’Souza, Y.M. Delepine, A.R. Cordy, 1994.
Offshore Technology Conf. OTC 7443
R.T. Goncalves, F.T. Matsumoto, E.B. Malta, 2009. Mar.
Syst. Ocean Tech. 5, 1.
R.T. Goncalves, F.T. Matsumoto, E.B. Malta, 2010. J.
Offshore Mech. Arct. Eng. Trans ASME 132, 1.
R.T. Goncalves, G.F. Rosetti, A.L.C. Fujarra, 2012. J.
Offshore Mech. Arct. Eng. Trans ASME 134, 1.
T.Y. Wang, Y.X. Feng, 2011. Ship Ocean Eng. 40, 5.
W. Wang, L. Wang, Y. Du, Y. Yao, Y. Huang, 2016. Mar.
Struc. 46.
Y. Huang, W.H. Wang, Y.X. Yao, 2013. ZL
201220526277.4.
Y. Huang, W.H. Wang, Y.X. Yao, 2013. ZL
201220526306.7.
Y. Huang, W.H. Wang, Y.X. Yao, 2013. ZL
201220526712.3.
ISOCEEN 2018 - 6th International Seminar on Ocean and Coastal Engineering, Environmental and Natural Disaster Management
158
