
Segmentation Using Histogram and Fuzzy Entropy Principle
Jie Zhang
1,2
,Tao Han
1
,Hongli He
1
and Zanchao Wang
1
1
Institute of testing, Chinese Flight Test Establishment, Xi'an, China
2
School of Aviation, Beijing University of Areonautics and Astronautics, Beijing, China
Keywords: Fuzzy region, maximum fuzzy entropy principle, threshold, histogram, image segmentation.
Abstract: Segmentation of a composite image which contains two simple subimages is described. The a-priori
knowledge about the two simple subimages is that they possess the maximum amount of entropy. The
probability density functions(pdf s) of these image pixels are shown to be of theQuasi-gaussian form.
Parameters for the pdf are estimatedand then the maximum likelihood ratio test is applied to segmentation.
An iterative algorithm is employed to improve the segmentation accuracy. Extension of this method to the
segmentation of images with arbitrary pdf is discussed. This paper presents a thresholding approach by
performing fuzzy partition on a two-dimensional (2-D) histogram based on fuzzy relation and maximum
fuzzy entropy principle. The experiments with various gray level and color images have demonstrated that
the proposed approach outperforms the 2-D non-fuzzy approach and the one-dimensional(1-D) fuzzy
partitionapproach.
1 INTRODUCTION
The standard of evaluating the quality of the image
is mostly determined by the subjective of the
observer, and there is no general quantitative
criterion. Therefore, in the practical application of
image enhancement, several algorithms can be
selected for the specific application and several
enhancement algorithms. Then, how to select a kind
of algorithm with good visual effect and small
computation It comes out. To this end, only through
a number of representative image enhancement
algorithms in-depth, systematic study and
comparison, in order to find out their corresponding
advantages and disadvantages and the best
application scene, thus a set of effective application
of the image enhancement algorithm guidance rules.
Image enhancement techniques are used to
improve an image, where "improve" is sometimes
defined objectively (e.g., increase the signal-to-noise
ratio), and sometimes subjectively (e.g., make
certain features easier to see by modifying the colors
or intensities).
This section discusses these image enhancement
techniques:
Intensity Adjustment
Noise Removal
The functions described in this section apply
primarily to intensity images. However, some of
these functions can be applied to color images as
well. For information about how these functions
work with color images, see the reference pages for
the individual functions.
Simulation is a virtual representation of the
reality. It may also be defined as the process of
knowing the characteristics & exhibiting behavior of
a particular physical system. Sometimes a learner
finds it quite difficult to understand any physical
system behavior by just reading it from the written
material but once he is able to see the things actually
happening on the computer system the things really
change. That’s why the very important real life
techniques of image enhancement such as basic gray
level techniques, using arithmetic & logical
operations, using spatial filtering and also in the
frequency domain various filters like Low Pass
Filters, High Pass filters have been simulated on
Matlab and studied. The principal objective of
Enhancement a Images to process an Image so
suitable than the original image for a specific
application. Image Enhancement method falls into
two broad categories ways: Spatial Domain and
Frequency Domain methods.

Image segmentation in image processing and
image recognition system has a broad application
and prospects. Generally two different images have
different pdfs, and the work of determining the
difference is statistical in nature. The thresholding
method is a significant technique for image
processing and pattern recognition, which is
considered as the first step in image processing.
Many methods are proposed to select the automatic
threshold, while most of the single threshold
technology can be extended to multiple thresholds,
so this paper focuses on the single threshold. The
proposed method automatically determines the fuzzy
region and the threshold according to the maximum
entropy principle, thus to obtain the optimal solution
for the 2-D fuzzy entropy and the genetic
algorithm[1]. When the gray level is large, the
approximation is preferable, the standard deviation
is quite small and the average value is not at the
edge of the probability density function. This type of
images has been identified as images with the
maximum amount of entropy. According to the
research work above, these simple maximum
entropy images can be seen in many real life scenes,
such as television images.
2 THE PROPOSED METHOD
Complex images are composed of two simple image
pixels, the pixel value function is represented by
()
0
f
x
and
()
1
f
x
,and
x
is the pixel value. Thus,
the pdf of the Composite image is:
() () ( ) ()
01
1,01fx f x f x
ααα
=+− ≤≤
(1)
Where
α
is the mixing ratio and represents two
simple sub-images of the relevant type (measured by
the pixel). Although it is a point segmentation
method, but the overall consideration is also
feasible. Thus, only the gray value of the pixel is
used in the calculation of the image segmentation.
The largest possible inerratic classification for the
pixel
x
is
0
f
, so that the smallest possible error
must be satisfied.
1
()
22
()
fx
fx
α
≥−
(2)
In fact, when
α
and
()
1
f
x
are unknown to the
observer, then the pdf
()
f
x
of the composite image
is the only valid observation data. If the inequality is
estimated, then
α
and
()
1
f
x
must be predicted by
some practical methods
[2]
.
Define four adjacent mean
()
,
g
xy
around pixel
()
,
f
xy
:
()()
()
1
(, ) [ [ , 1 , 1
4
1, ( 1, )] 0.5]
g
xy f xy f xy f
fx y fx y
=++−++
++− +
(3)
The 2-D histogram is an array of
(, )
f
xy
,
(, )
g
xy
functions relative to the number of
occurrences. It can be seen as the two quantities
X
and
Y
, where
X
is the gray level,
Y
is the
average gray level, and
{
}
0,1, 2 1XY L== −L
.
The image points have the same intensity, but
different 2-D histogram of which different spatial
features may be distinguished in second dimensions
(local average gray level).
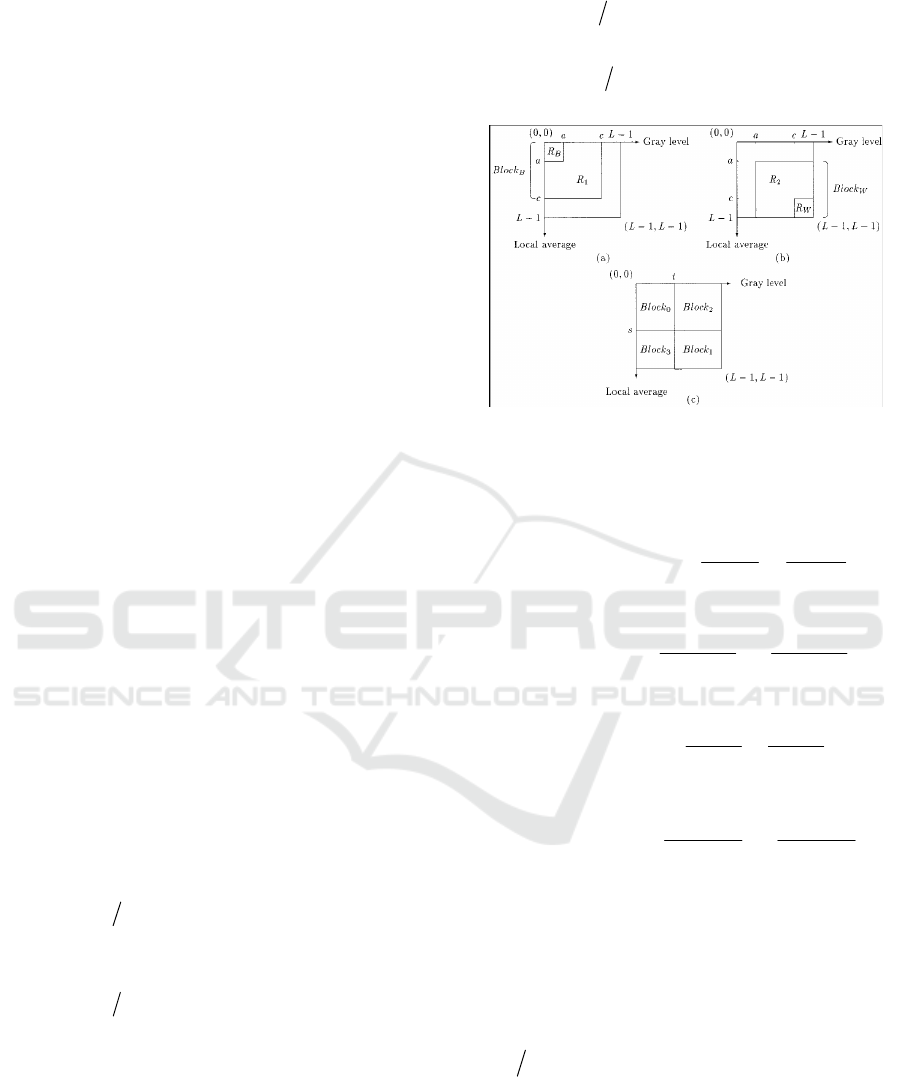
Block B and block W are each defined by (3),
and four fuzzy quantities
BrightX
,
DarkX
,
BrightY
, and
DarkY
are defined with the S
function and the corresponding Z function.
() ()
,,,
xX xX
BrightX x S x a b c
BrightX
xx
μ
∈∈
==
∑∑
(4)
() ()
,,,
xX xX
Dark x Z x a b c
DarkX
xx
μ
∈∈
==
∑∑
(5)
() ()
,,,
yY yY
BrightY y S y a b c
BrightY
yy
μ
∈∈
==
∑∑
(6)
() ()
,,,
yY yY
DarkY y Z y a b c
DarkY
yy
μ
∈∈
==
∑∑
(7)
Here,
()()
,,, 1 ,,,
Z
xabc S xabc=−
.The fuzzy
relation Bright is a subset of the full analytic
space
XY×
, with
Bright BrightX BrightY X Y=×⊂×
(8)
() ()
() ()
()
,,
min ,
Bright x y BrightX BrightY x y
B
rightX x BrightY y
μμ
μμ
=× =
(9)
Similarly, there are:
Dark DarkX DarkY X Y=×⊂×
(10)
()
() ()
()
(, ) ,
min ,
Dark x y DarkX DarkY x y
DarkX x DarkY y
μμ
μμ
=× =
(11)
Use the
()
Ai
x
μ
function to define
A
as a fuzzy
set of elements
,1, ,
i
x
iN= L
,
()
i
Px
is the
probability of occurrence of
A
. The maximum
entropy of the element
A
is defined by equation
(12)
[3]
.
() ()() ()
1
log
N
fuzzy A i i i
i
H
A xPx Px
μ
=
=−
∑
(12)
The global entropy of the image is defined as:
()
()( )
BW
H
image H Block H Block=+
(13)
The dark block B as shown in Figure 1 can be
divided into a non-fuzzy region
B
R
and a fuzzy
region
1
R
:
1BB
B
lock R R=∪
(14)
() ()()
{
}
,,1,,
B
B
RxyDarkxy xyBlock
μ
==∈
(15)
() ()()
{
}
1
,,1,,
B
RxyDarkxy xyBlock
μ
=<∈(16)
Similarly, the bright block
w
Block
consists of a
non-fuzzy region
w
R
and a fuzzy region
2
R
, as
shown in Figure 1 (b).
1WW
B
lock R R=∪
(17)
() ()()
{
}
,,1,,
WW
RxyDarkxyxyBlock
μ
==∈
(18)
() ()()
{
}
2
,,1,,
W
RxyDarkxy xyBlock
μ
=<∈
(19)
Figure 1: Image blocks.
The following four kinds of entropy can be
calculated as follows:
() ( )
()
()
()
1
11
1
,
,,
,log
xy xy
fuzzy
xy R
x
yxy
xy R xy R
nn
HR Darkxy
nn
μ
∈
∈∪
=−
∑
∑∑
(20)
()
()
()
()
,
,,
log
B
BB
xy xy
nonfuzzy B
xy R
x
yxy
xy R xy R
nn
HR
nn
∈
∈∈
=−
∑
∑∑
(21)
() ( )
()
()
()
2
22
2
,
,,
,log
xy xy
fuzzy
xy R
x
yxy
xy R xy R
nn
HR Brightxy
nn
μ
∈
∈∈
=−
∑
∑∑
(22)
()
()
()
()
,
,,
log
W
WW
xy xy
nonfuzzy W
xy R
x
yxy
xy R xy R
nn
HR
nn
∈
∈∈
=−
∑
∑∑
(23)
x
y
n
is the number of occurrences of
),( yx
in
the 2-D histogram. The membership
function
()
,
B
right x y
μ
and
()
,Dark x y
μ
are
defined by the equations (9) and (10), respectively.
It should be noted that the calculations
of
x
yxy
nn
∑
in the four regions are independent.
3 IMAGE SEGMENTATION
PROCESS
Consider that the images are mixed by two
maximum entropy images
[4]
and both satisfy the pdf
that is the Gaussian distribution:
()
()
0
0
2
0
0
1
exp
2
2π
x
fx
μ
σ
σ
−
⎡⎤
=−
⎢⎥
⎣⎦
(24)
2
1
1
2
1
1
()
1
() exp
2
2π
x
fx
μ
σ
σ
⎡⎤
−
=−
⎢⎥
⎣⎦
(25)
In order to estimate
1
()
f
x
from the mixed pdf
s, some well-known classical measures such as
matrix method are applicable. One alternative is
to assume that
α
is 0 and
1
μ
and
1
σ
in the
mixed image
()
f
x
are constant in terms of
sample mean and sample deviations. The mixed
image contains a maximum entropy sub-image,
which is much smaller than the mixed image in
zize, for example,
α
is much less than 1%,
otherwise the probability of segmentation error
would be very large [5]. This iterative algorithm
will be discussed below, extended to the case of a
large
α
. The probability density curve is shown
in Figure 2.
Figure 2: Probability density.
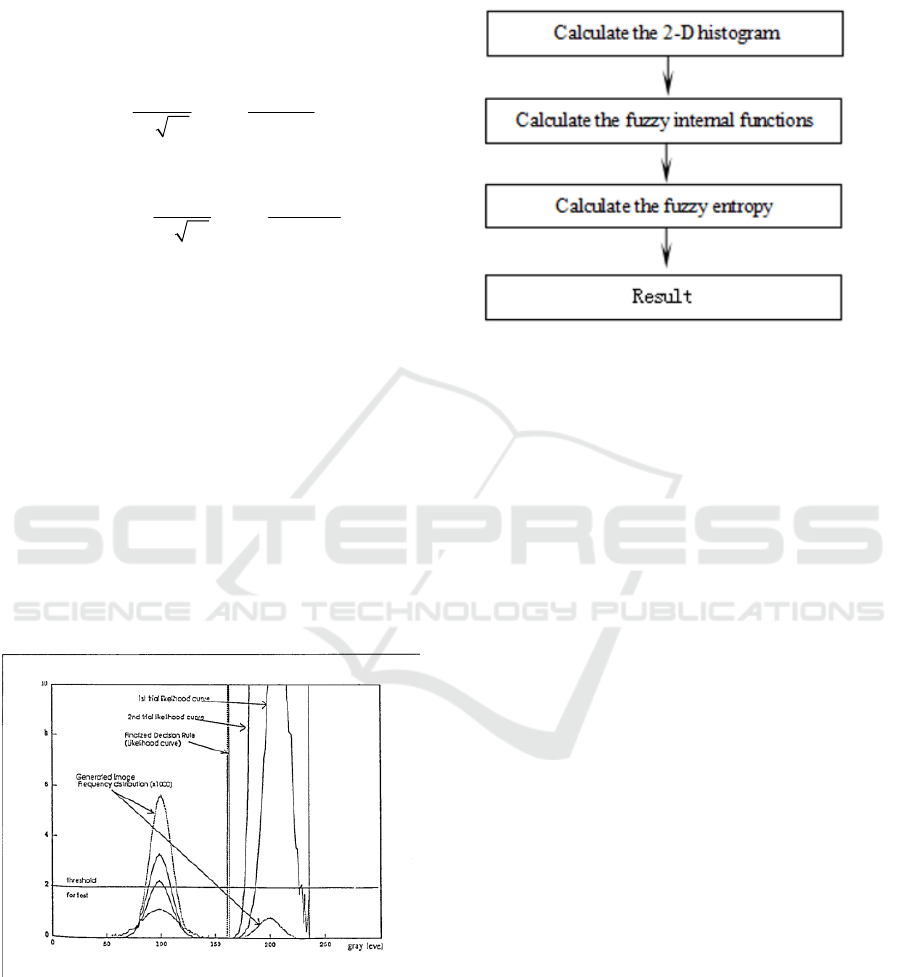
Finding the optimal a, b, c is an optimization
problem, which can be solved by heuristic search,
genetic algorithm
[6]
, stew fire simulation, etc. This
paper will use genetic algorithm to find the optimal
solution, and the process is shown in Figure 3. The
2-D histogram of the image is calculated first, then
the fuzzy internal functions on the 2-D histogram are
calculated, followed by the fuzzy entropy and finally
the result is obtained.
Figure 3: Optimal solution flow.
4 ANALYSIS OF RESULTS
Most grayscale horizontal image thresholding can be
extended to color images to directly process the
various components of the color space and then
combine the results to obtain the final image in one
way or another. Finally, process the color image in
each RGB color space respectively, and then merge
the three results to a new RGB color image
[7]
.
Therefore, a simulation system based on SUN
SPARC workstation is built to investigate the
performance of the iterative algorithm. For different
alternative image parameters, such as mean,
standard deviation and mixing ratio, this system will
be artificial synthesis. The iterations are then run on
the same machine and the iterative process is
investigated under different synthetic parameters
[8]
.
The simulation results show that if the segmentation
error is not large in the first run, then the pdf s of all
pixels is classified into different
()
1
f
x
or
()
0
f
x
.
Repeat this process to reduce the total classification
error until the end of the operation.
For Figure 4 (a), the threshold obtained by the 1-
D maximum fuzzy entropy method is 127, and the
entropy vectors obtained by the 2-D non-fuzzy
method and the 2-D fuzzy method are (119,159) and
(112,112) as shown in Figure 4 (b), Figure 4 (c) and
Figure 4 (d). Figure 4 (d) is clear than Figure 4 (b)
and Figure 4 (c) in detail, since the sky and the
tower are better segmented [9].
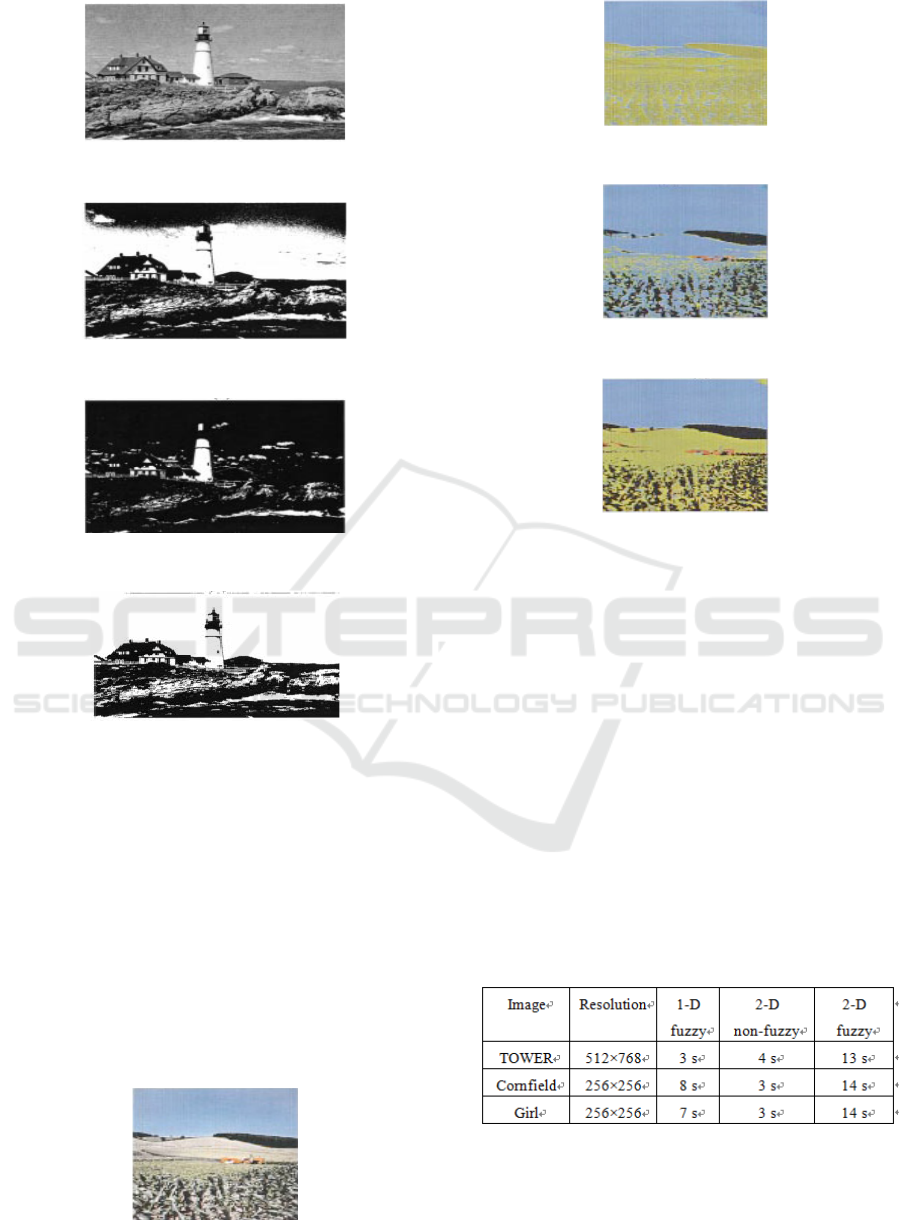
(a)
Original image
(b)
1-D fuzzy entropy result
(c)
2-D non-fuzzy entropy result
(d)
2-D fuzzy entropy result
Figure 4: Example 1 of image segmentation.
In Figure 5 (b), the three thresholds of RGB are
102, 113 and 112; for Figure 5 (c), the RGB
thresholds are (82, 82), (81, 75), and (66, 69); for
Figure 5 (d), the RGB threshold vectors are (81,81),
(100,100) and (154,154). Figure 5 (d) is the only one
that extracts the blue sky and the tractor from the
heaven and the earth, so the partition is better than
Figure 5 (b) and Figure 5 (c). The upper right corner
of Figure 5 (d) is misclassified because of the
threshold value which also appears in Figure 5 (c).
In summary, Figure 5 (d) gives the best results.
(a)
Original image
(b)
1-D fuzzy entropy result
(c)
2-D non-fuzzy entropy result
(d)
2-D fuzzy entropy result
Figure 5: Example 2 of image segmentation.
In Figure 6 (b), the RGB thresholds are 252, 211,
164; for Figure 6 (c), the threshold vectors are (138,
128), (164, 196), and (180, 182); for Figure 6 (d),
the threshold vectors are (215,215), (196,196),
(171,171). In Figure 6 (d), the eyes, nose and mouth
are extracted very well, the color of the clothes and
hair are also different. The color of the clothes, the
details of the hair and face are the same in Figure 6
(b). For Figure 6 (c), the clothes are misclassified to
the background, so they can not stand out of the
background
[10]
. This experiment is conducted on the
Lenovo G450 platform based on vc ++ 6.0, and the
computing time is shown in Table 1.
Table 1: Computing time.

(a)
Original image
(b)
1-D fuzzy entropy result
(c)
2-D non-fuzzy entropy result
(d)
2-D fuzzy entropy result
Figure 6: Example 3 of image segmentation.
As can be seen from Table 1, the 2-D non-
fuzzy method outperforms the 1-D fuzzy and 2-
D fuzzy method in terms of computing time, and
the advantage is obvious.
5 CONCLUSIONS
In this paper, the parameters for the pdf s are
estimated first, and then the maximum likelihood
ratio test is applied to segmentation. The iterative
algorithm is employed to improve the accuracy of
segmentation and it is also extended to the
segmentation of images with arbitrary pdf s. The
experimental results indicate that the spatial
information of the pixels should be taken into
consideration when selecting the threshold, and the
2-D fuzzy approach is superior to the 2-D direct
maximum amount of entropy approach and 1-D
fuzzy entropy approach.
REFERENCES
1. Weiming, H., Tieniu T., 2004. A Survey on Visual
Surveillance of Object Motion and Behaviors, IEEE
Transactions on systems, man, and cybernetics.
2. Li He., Hui Wang., Hong Zhang., 2011. Object
Detection by Parts Using Appearance,Structural and
Shape Features. Mechatronics and
Automation(ICMA).
3. Anvaripour, M., Ebrahimnezhad, H., 2010. Object
Detection with Novel Shape Representation Using
Bounding Edge Fragments,Acta Photonica Sinica.
4. Wei, S., Baolong, G., Juanjuan, Z., 2010. Robust
Object Tracking via Hierarchical Particle Filter,
Telecommunications(IST).
5. Tingwu, Y., Zhengzhong, Z., 2014. Optical-Electronic
Measurement Theory and Methods in Flight Test,
National Defense Industry Publishing House,Beijing.
6. Comaniciu, D., Meer, P., 2002. Mean shift: a robust
application toward feature space analysis, IEEE
Transactions on Pattern Analysis and Machine
Intelligence.
7. Jian, X., Zhemin, D., 2005. Kalman Filter in Target
Tracking, Computer Simulation.
8. Nouar, O, D., Ali, G., Raphael, C., 2006. Improved
object tracking with Camshift algorithm, IEEE
International Conference onAcoustics.
9. Shiwei, G., Lei, G., Ning, Y., 2009. A New Particle
Filter Object Tracking Algorithm, Journal of Shanghai
Jiaotong University.
10. Lifeng, Q., Xinxi, F., Xiaoping, H., 2009. A New
Object Tracking Algorithm, Opto-Electronic
Engineering.
