
Study on the Frame Configuration and Optimization Design of
Miniature Foldable Electric Vehicle
Bo Jiang
1
, San chuan Zhang
1
and Ting ting Wang
1
1
College of Mechanical Engineering, Zhengzhou University, Science Avenue No.100, Zhengzhou, China
Keywords: Miniature electric vehicle; Foldable frame; Single-objective optimization design; Structure simulation.
Abstract: In order to solve the miniature foldable electric vehicle frame configuration and design problems, the key
dimensions and constraints of the frame has been extracted and a single objective optimization
mathematical model has been established and optimized by using MATLAB optimization tool kit, basing on
the design goals. The 3D model of the frame has been built by SOLIDWORKS and the ADAMS has been
used for kinematics simulation analysis. The results show that the optimized folding size of the vehicle has
increased by 18%, which meets the design requirements and the stability of the designed mechanism under
certain speed conditions is also verified.
1 INTRODUCTION
The concept of intercity vehicles has been proposed
to solve the increasingly serious urban traffic
problems in recent years. The Hiriko[1], a miniature
electric car with a folding frame developed by MIT
can realize such functions as shortening wheelbase
and zero radius steering. On the basis of Hiriko, EO
SCC 2[2-3], developed by DFKI, introduces the idea
of modular design, which lays a foundation for the
serialized development of the vehicle while realizing
the folding and high mobility of the vehicle.
A kind of electric vehicle folding mechanism
based on separating frame and rocker slider
mechanism is proposed and designed in this paper.
2 FRAME FOLDING
MECHANISM
CONFIGURATION DESIGN
2.1 Design Objective
According to GB1589-2016 and the same type of
vehicles, the goal of parking three electric vehicles
in folded state on the parking space of 5-5.5 meters
long compact car is realized by controlling the
external profile size of the vehicle.
2.2 Design Scheme
The frame is designed as a separate structure that
contains front frame, main frame and rear frame. A
folding mechanism with the principle of rocker
slider is used to lift the main frame, and the main
frame drives the front frame to shift, thus reducing
the length of the vehicle. Considering the cost and
structure interference, the front and rear frame adopt
the same frame and the rear frame is designed as the
inclined plane where the rear frame meets the main
frame. The frame folding scheme (side view) is
shown in Figure.1.
Figure.1: Scheme of foldable frame.
When the vehicle is stopping, the rear frame
wheels keep still and the bottom AK of the main
frame is parallel to the ground. When the vehicle is
folding, the electric servo cylinder BC pushes the
back of the main frame which is connected with the
rocker OA and then the front frame which is
connected with the hinge points K is shifted
backward to shorten the length of the vehicle.
2.3 Mathematical Modeling
2.3.1 Vehicle Parameters
On the basis of referring to the national standard for
the size of similar types of vehicles and vehicle
exterior profile, the main performance parameters of
the vehicle are summarized in Table.1.
Table.1: Vehicle parameters.
Category
Value
Vehicle length, mm
2000
Main frame length, mm
1300
Wheel base, mm
1500
Tread, mm
1100
Curb weight, kg
270
Maximum speed, km/h
80
2.3.2 Design Variable
As the frame is a complex structure, the main
structural interference factors should be considered
in the designing process, and the model should be
simplified.
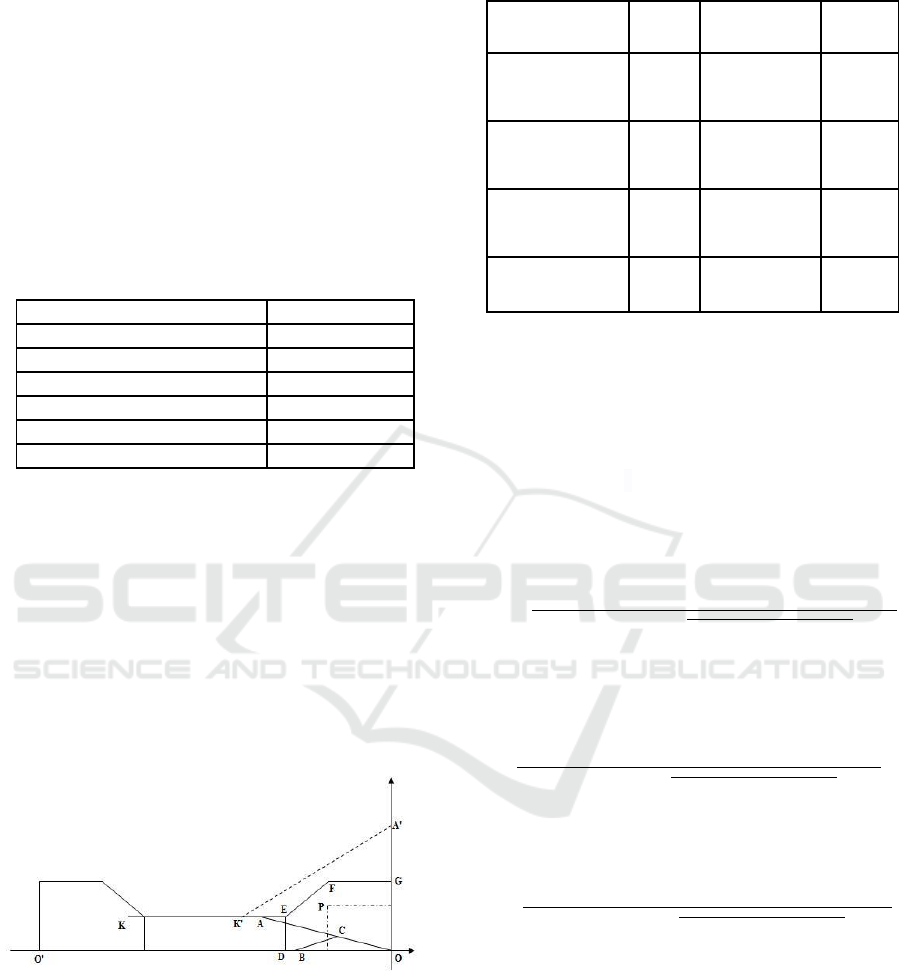
The Cartesian coordinate system as shown in
Figure.2 is established at the hinge point O of the
rocker and the rear frame. The main dimensions
such as the vehicle exterior profile and the outline
of the battery pack of the external frame are
extracted, which are taken as design variables.
Figure.2: Simple diagram of the folding mechanism.
The value range of design variables are
determined by visual design and comparison of
vehicle size of the same type that are shown in
Table.2.
Table.2: Summary of designing variables.
Variable
Mark
Range
Initial
value
Front height
of rear frame
DE
X
1
0-400mm
150mm
Bevel length
of the rear
frame EF
X
2
0-400mm
290mm
Length of
upper side of
rear frame FG
X
3
0-400mm
290mm
Slope angle of
rear frame
X
4
30°-60°
45°
2.3.3 Objective Function
In order to reduce the parking space, the wheelbase
should be the minimum after folding. The maximum
displacement of the point K where the front frame is
hinged with the main frame is designed as the
objective function. It is assumed that the rocker OA
is in the vertical position when the vehicle folding
length reaches its maximum.
The projection length of the main frame bottom
face AK:
′
The maximum displacement of the hinged point
K of the main and front frame after folding:
The model objective function expression:
2.3.4 Constraint Conditions
1. Vehicle length constraint
To control the vehicle size, the total length of the
vehicle frame should be less than 2000mm. Design
variables should satisfy the relation:

After simplifying, the relation:
(1)
2. Limit point interference constraint
In the process of frame folding, there should be
no interference between the hinge point A of lifting
bar and the limit position point F of auxiliary frame,
and the length of lifting bar should be longer than
the length from point O to point F. The dimension
constraint relation:
(2)
3. Frame interference constraint
After folding, the front and rear frames should
not interfere. As the point K is not the limit position
of the front frame, when the frame reaches the limit
position, the clearance between the point K and the
rear frame is reserved for 120mm.The dimension
constraint relation:
After simplifying, the relation:
(3)
4. The battery interference constraint
Due to the use of hub motor drive technology,
the space of the front and rear frame is mainly
occupied by the battery pack, so the interference of
the battery pack should be considered in the design
of the frame.
The equation of the straight line EF can be get
from the point E(-
,
)and point
F(
,
).
The liner equation:
To ensure that the limit position point P (-520
,180)of the battery pack does not interfere with
the ramp of the auxiliary frame, point P should be
below the right of the linear EF in the coordinate.
The constraint relation can be obtained from the
position relation:
(4)
5. Front and rear frame size constraint
Considering the size of battery pack and folding
mechanism of vehicle size, the outer profile height
of auxiliary frame is preliminarily determined to be
300-500mm. Constraint relation:
and
(5)
The length of the front and rear frame is 400-
600mm.And the constraint relation:
and
(6)
6. Constraint of the lifting bar inclination
Rotation of the rocker plays a major role in
frame folding. In order to ensure that the pressure
angle of the rocker is not too large, its inclination
angle relative to the X-axis of the coordinate system
is set within 10-30°. The constraint relation:
°
and °
(7)
3. MATLAB OPTIMIZE DESIGN
AND MODELING SIMULATION
3.1 Multivariable Optimization
The mathematical model of frame folding
optimization belongs to the problem of single
objective multivariable optimization.
The normalized form[4]:
min F(X)
s.t
AX ≤b
AeqX = beq
C(x) ≤ 0
Ceq(X) = 0
lb≤ X ≤ub
The function fmincon is invoked to solve the
problem. The basic format of the function command
:
[x,fval,exitflag,output]=fmincon(@objfun,x0,A,b
,Aeq,beq,lb,ub,@confun)
By writing the M file of the objective function
and the constraint function, the optimization results
can be obtained by establishing the main program
solution:
x =149.2821 400.0000 226.7949 0.5236
fval = -778.9473
exitflag =1
The result (exitflag =1) shows that the first-order
optimality condition of variable satisfies the
tolerance range. According to the optimized result,
the folding length of the frame will reach
778.95mm, which will reach one-third of the length
of the whole vehicle. The summary results of design
variable optimization are shown in Table.3.
Table.3: Optimization results of designing variable.
Design
variable
Length, mm
Angle,°
X1
X2
X3
X4
Initial
value
150
290
290
45
Optimum
value
149
400
226
30
Range of
optimization,%
0.67
37.9
22.1
33.3
3.2 3D Modeling
According to the requirement of light weight and
strength of the frame, the standard channel steel is
adopted for the assembly modeling, and the rigid
point factor of the suspension is ignored in the
preliminary modeling. The virtual prototype
modeling of the whole frame of the frame is carried
out with SOLIDWORKS software, as shown in
Figure.3a and Figure.3b. The lifting of frame rocker
depends on the extension of actuator's pushing.
Figure. 3a: The working condition of the frame.
Figure.3b: The folded state of the frame when parking.
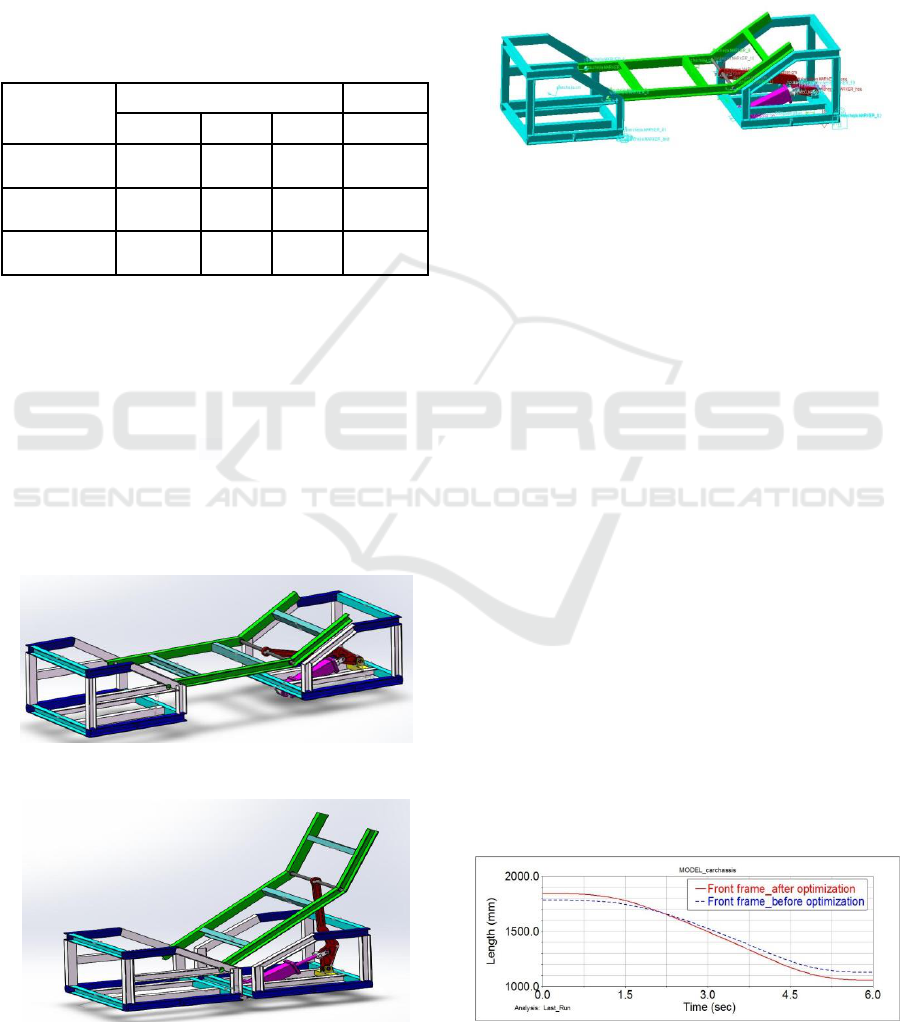
The 3D modeling of frame is imported into
ADAMS software and the source part model is
divided into front frame, main frame, rear frame,
connection, rod, linear actuator and connection first-
class parts by Boolean operation.
The ADAMS model in Figure.4 is obtained after
pre-processing.
Figure.4: ADAMS model of the car chassis.
3.3 Simulation Settings
In order to achieve the frame from acceleration start
to slow down the stillness of the folding process, the
ADAMS built-in STEP function is added in the
simulation of linear actuator and the connection to
simulate the movement speed. The movement
simulation time is set to 6 seconds.
The STEP function is shown below:
step(time,0,0,2,36.4)+step(time,2,0,4,0)+step(time,4,
0,6,-36.4)
The STEP Function meaning:The moving pair
accelerates from static to 36.4mm/s in 0-2s time,
moves at a constant speed of 36.4mm/s for 2-4s,and
the speed is reduced to 0 in 4-6s.
3.4 Simulation Results and Analysis
3.4.1 Frame Folding Analysis
The center of mass of the front frame is used to be
the reference point to measure its displacement in
the folding direction. The displacement of the front
frame under the initial size is compared with that of
the optimized front frame. The comparison results
are shown in Figure.5.
Figure.5 :Displacement of the front frame.
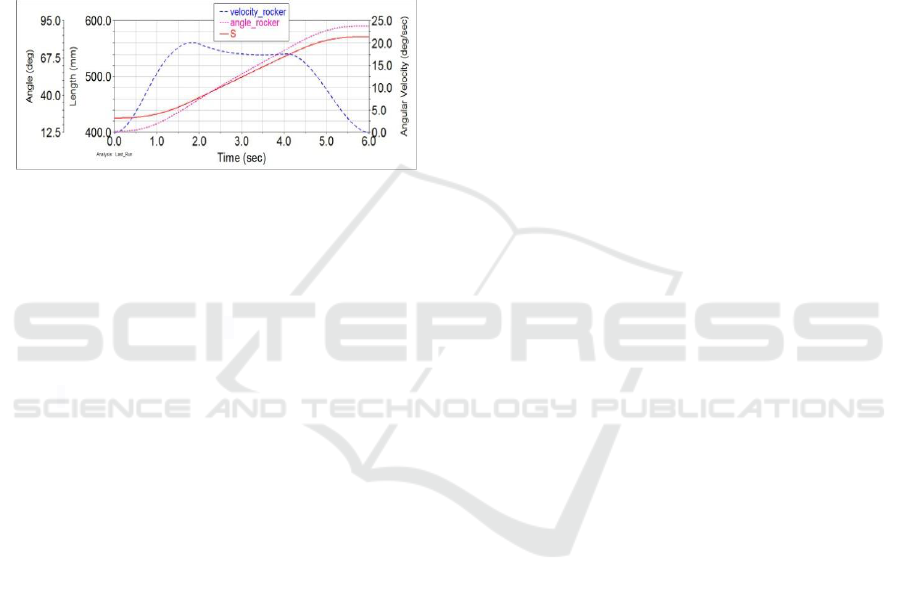
As can be seen from the Figure 6, the folding
length of the frame, that is, the displacement of the
front frame increases from 657mm to
775mm.Compared with the results of MATLAB
model, the error after optimization is less than 1%,
indicating that the virtual prototype modeling meets
the requirements.
3.4.2 Linear Actuator Motion Analysis
The linear actuator stroke, rocker rotation angle and
angular velocity images are shown in Figure.6.
Figure.6: The angular, velocity of the rocker and the
elongation of the line actuator.
As can be seen from the image, the maximum
displacement of the linear actuator S is 145mm,
which satisfies the maximum stroke of the selected
linear actuator of 152mm. The maximum rotation
angle of the rocker is 91, which is similar to the 90
rotation angle of the rocker in the mathematical
model. At the beginning and ending of the motion,
the displacement of the linear actuator changes
gently and the angular velocity of the rocker is not
accelerated or decelerated rapidly.
4 CONCLUSIONS
1. The folding length optimized by MATLAB has
increased by 18% compared with that before
optimization and is more than one third of the length
of frame. The folding effect of frame meets the
design requirements.
2. The comparison between MATLAB
calculation results and ADAMS simulation results
shows that the modeling error is less than 1%, which
reflects the reliability of this model.
3. The variation of motion parameters of key
components of folding mechanism shows the
stability of the designed mechanism at a certain
speed.
REFERENCES
1. Hiriko City Car.
http://praveens.mit.edu/portfolio/hiriko-city-car.
2. Birnschein T, Kirchner F, Girault B, etal. An
innovative, comprehensive concept for energy
efficient electric mobility - EO smart connecting
car[C]. Energy Conference and Exhibition. IEEE,
2012:1028-1033.
3. Yüksel M, Ahmed M, Girault B, et al. A Framework
for Design, Test, and Validation of Electric Car
Modules[M].Advanced Microsystems for Automotive
Applications 2014.Springer International Publishing,
2014:245-254.
4. Zhao Jijun. Optimization Technology and MATLAB
Optimization Tool [M]. China Machine Press, 2011
,
26-46.
