
Development of 1SG-230 Type Intelligent
R
ear-Mounted Subsoiling
and
R
otar
y
Tilla
g
e Combined Machine for Su
g
arcane Field
Lijiao Wei
1,a
, Ming Li*
1,b
, Xuehu Dong
1,c
, Weihua Huang
1,d
, Bolin Li
e
and Xiaoli Yan
f
Agricultural Machinery Institute, Chinese Academy of Tropical Agricultural Sciences, Zhanjiang, Guangdong, 524091
1
Full Tropical Crops Agricultural Equipment Key Laboratory, Ministry of Agriculture, Mazhang District, Zhanjiang,
Guangdong, 524091
a
weilijiao2008@163.com,
b
liming282@21cn.com,
c
dongxuehu_1981@163.com,
d
271253449@qq.com,
e
987073334@qq.com,
f
1034317901@qq.com
Keywords: Rear-mounted, rotary tillage, Subsoiling, Combined machine, Intelligent deep pine detection system.
Abstract: In view of the fact that in the sugarcane planting area in southern China, the plow foundation is mainly
plowed and the hard plow bottom is formed, and in recent years, there are some problems such as the soil
adhesion of soil components, crop stalks and other jamming tools and the high energy consumption of the
machine tools in the implementation of conservation tillage techniques. Based on the above problems, we
designed the 1SG-230-type rear-mounted subsoiling and rotary tillage combined machine. In this paper, we
design and analyze the key components such as the overall mechanism of machine tools, rotary tillage and
deep pine, etc., and evaluate the performance of the machine in field experiments with the intelligent
subsoiling system.
1 INTRODUCTION
Tillage land operations in sugarcane fields usually
use tillage, raking and compaction tillage processes
(Qin-Fenglan, 2014; Luo-Quan, 2015). However,
long-term mechanical tillage makes the soil form a
hard plow bottom, the soil water storage capacity
drops, the root of the sugarcane can 't be dug deep
and is prone to lodging . Therefore, it is imperative
to carry out deep loose soil preparation technology
in sugarcane fields. Although the technology of deep
loose land preparation machine developed in the
north of China is relatively mature, it can 't be used
directly in the south because of the large soil
viscosity, the abundance of weeds and crop straw,
the more stones and so on. According to the
conditions of cultivated land and the agronomic
requirements of tropical crops in hot areas of China,
the compound deep loosening land preparation
machinery suitable for agricultural production in hot
areas should be designed (Xu-Shucai, 2007).
Therefore, the project team in this paper
developed 1SG series deep loosening rotary tillage
combined machine for the cultivated land conditions
in tropical areas of southern China
(
Wei-Lijiao,
2013), which initially overcome the problems of soil
specific resistance and sticky in the southern hot
area. However, the research group in the promotion
of the use of equipment found that: tropical crops
such as straw, weeds and more serious winding
plugging equipment. In order to solve this problem,
based on the original model, this paper designed a
rear-mounted subsoiling and rotary tillage combined
machine. First, the machine smashes the topsoil with
a rotary cutter, and then uses the subsoil plough to
work on the soil layer after the rotary plowing. In
this way, the power consumption and clogging of the
implement are greatly reduced. Combined with the
national subsoiler job subsidy needs, the developed
equipment has installed the intelligent deep
loosening detection system, which greatly improves
the efficiency of the operation subsidy.
2 MACHINE STRUCTURE AND
WORKING THEORY
1SG-230 type rear-mounted subsoiling and rotary tillage
combined machine for sugarcane,it is mainly composed
of three-point suspension racks, racks, gearboxes, deep
loose parts, rotary cutter shaft, movable pallet, cover. The
machine is shown in Figure 1and the main technical
parameters are shown in Table 1.
632
Wei, L., Li, M., Dong, X., Huang, W., Li, B. and Yan, X.
Development of 1SG-230 Type Intelligent Rear-Mounted Subsoiling and Rotary Tillage Combined Machine for Sugarcane Field.
In 3rd International Conference on Electromechanical Control Technology and Transportation (ICECTT 2018), pages 632-636
ISBN: 978-989-758-312-4
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
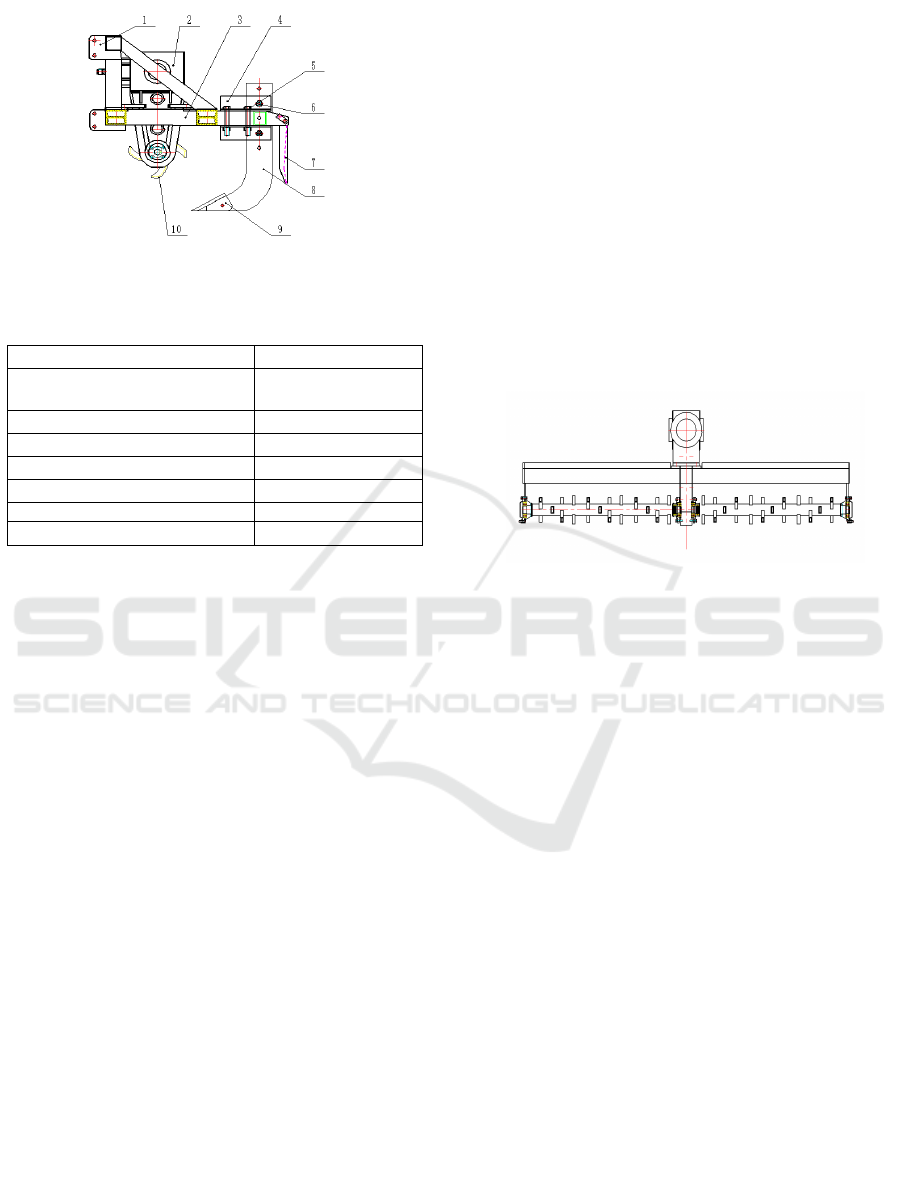
Figure 1: Overall design diagram.
Table 1:
Main parameters of machine.
Name Parameters
Dimensions(Length Width
Height, mm)
2500×1350×1250
Supporting Power(kw) 88.3~102.9
Machine Working Width(cm) 230
Subsoil plough Number 4
Number of Blades Around each 24
Rotary Depth 20c
m
Subsoiling Depth ≥35cm
3 DESIGN OF KEY PARTS OF
THE MACHINE
3.1 Design of the rotary tillage
components
3.1.1 Design of rotary cutter shaft
In the process of machine design, there are some
main factors of the design of the rotary cutter shaft
which clogging by sugar cane leaves, weeds and
other residua. The first factor is the small outer
diameter of the rotary tillage shaft will easily
entangled sugarcane leaves, weeds and so on.
The second factor is the rotational speed of the
rotary tiller shaft will not have enough power to cut
off the straw. At the same time, the centrifugal force
produced is not enough to remove the stubble of the
soil. The third factor is weeds are easily entangled
when the knife seat is too dense.
3.1.2 The selection and installation of rotary
tiller .
According to the characteristics of sugarcane field,
the type of the rotary cutter is used for the type of
machete. The machete consists of a tangent part and
a side part. When the machine works, the left and
right machetes are used in combination, and the skid
cutting performance is good. When the machine is
working, the blade of the machete is cut into the soil
by the distance from the center of the blade to the
center of the blade so as to cut off the weeds and cut
off along the cutting edge. This kind of machete is
suitable for use in tropical weeds. The rotary tiller is
uniformly arranged in a double helix along the axis
of the two parts of the cutter shaft. The cutter seat is
opposite in the direction of the left and right half
axes, as shown in Figure 2, and the position is
symmetrical to ensure the balance of the whole force
of the cutter shaft. In order to make the angle of the
cutter seat should not be too small, the spacing of the
cutter seat should be larger.The number of the
design of the machine rotary blade is up to 48
(general rotary tiller is up to 62).
Figure 2: Arrangement of the rotary blade holder.
3.1.3 Determination of the parameters of a
machete rotary tiller
According to GB / T 5669, the shank of a machete
has two kinds of wide (T) and narrow (S), of which
a wide type has a bolt hole and a narrow type has
two. According to usage, there are three types of
machete, I, II and III. Among them, No. 2 scimitar is
mainly used in fields with green manure and more
straw. The gyration radius is 195mm, 210mm,
225mm, 245mm and 260mm. The structure of the
machete is shown in Figure 2, the work location is
tangent and side cut, and one side edge of the arc by
Archimedes spiral design (Tang-Jintao, 2014), its
function is cutting straw and soil. The function of
the side cutting edge is to cut the straw and the
soil.The blade body and the tangent part of the
scimitar has certain angle, and its function is to
throw the soil
(Zhu-Liuxian, 2012; Zhang-Lang,
2015).
3.1.4 The main parameters of IIT245 type
blade .
The machete knife roller slewing radius R=245mm,
the side edge of the initial radius of R0=143, the side
edge of end point radius R1=228mm, the cutting
edge of the blade wrap angle θ=27°,the working
Development of 1SG-230 Type Intelligent Rear-Mounted Subsoiling and Rotary Tillage Combined Machine for Sugarcane Field
633
width
b
=40mm, the height of the face of the
tangent h=45mm, the radius of the tangent section
r=30mm, the angle between the end radius and the
bending line of the side sectiont a=48°, the tangent
bending angle
β
=120°, the width of the top surface
of the side cutC
1
=4mm, the Cutting edge thickness
C
2
=2mm, the edge width I=12mm.
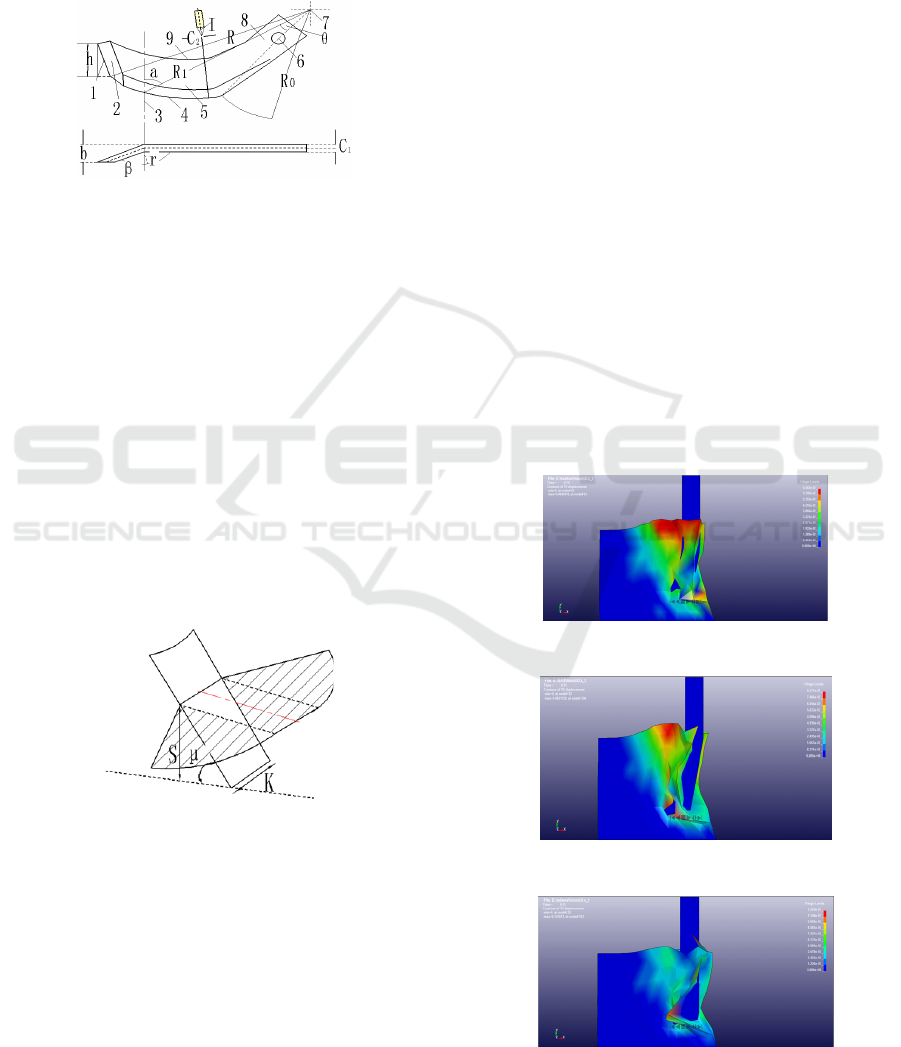
1.Tangent blade;2.Tangent;3.bend fold line;4.side edge
line; 5.lateral incisor; 6. Install holes ;7. tool roller center;
8. Knife handle; 9. Back margin
Figure 3: Structure of rotary blade.
3.2 Design of deep loose components
The loosening process of subsoiling plough in soil
can be seen as a simple wedge model put forward by
Mackis (He-Jin, 2005). The geometric model as
shown in Figure 4. The area size of deep loose
plough is positively correlated with depth S, plough
width K and wedge inclination μ. However, the soil
disturbance range does not increase obviously when
the depth of deep loosening S exceeds the critical
value. It is necessary to avoid excessive traction
resistance while ensuring the range of soil
disturbance, so the value of relevant parameters
should be reasonable (Wu-Haitao, 2013).
Figure 4: Model of scarifying soil by wedge.
In order to better select the shape of subsoil
plough and analyze the influence of plough shape on
subsoiling performance more intuitively. Based on
the Solidworks software, the circular, obliqueness
and no dip deep loosening plough models are
established, and three sets of simulation tests of A, B
and C are established by using the dynamic analysis
program. Simulation of the movement of three kinds
of subsoil ploughs in the soil when the speed of
advance is 0.7m/s. Among them, the soil model of
the deep was 50 cm, the length was 70 cm and the
width was 15 cm. The size of the three ploughs is
the same. The height was 70cm, the thickness was
3cm, the length of plough was 3cm, and the width of
plough body was 11cm.The model was imported
into ANSYS, and the rough grid was selected. The
time of setting the problem was 1S. After
completing the operation steps of LS-DYAN solver,
it was saved as K file. The average time spent in the
three sets of simulation experiments was 1143
seconds, and the simulation results were checked in
LS-PrePost4.0 program.
Because the soil attribute is defined by ordinary
plastic model, it can not fully reflect the
characteristics of latosol. But in the process of
simulation, the deformation of three kinds of wedges
with different shapes can be studied when they cross
the same plastic object at the same velocity. In
0.75S, the C model in the plastic body in the
maximum displacement of YZ plane, followed by
the B model, the A model of the minimum
displacement ,they are shown in figure 5 to 7, so
the soil disturbance ability are no inclination,
obliqueness, arc type deep loose plough.
Accordingly, plow stress increases. In order to
ensure a certain amount of soil disturbance and
avoid large traction resistance, the type of plow body
is chosen to be obliqueness.
Figure 5: A model YZ surface displacement.
Figure 6: B model YZ surface displacement.
Figure 7: C model YZ surface displacement.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
634
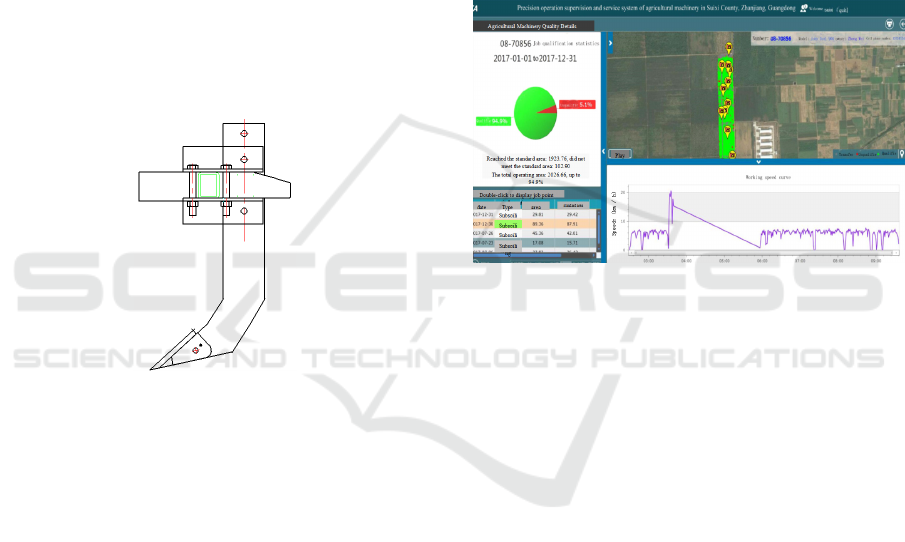
3.3 Connection design of subsoil plough
body
The subsoil plough body is connected to the rotary
tillage part by the connecting frame. The connection
frame is welded on the rotary tillage frame. Subsoil
connection frame long 85CM.The distance between
the connecting frame beam and the rotary tillage
frame is 5cm, so that there is enough distance
between the subsoil plough and the axis of the rotary
tiller. In this way, it can prevent the movement of
interference and blocking the occurrence of the
problem. The connection frame is shown in Figure
8.In order to facilitate the adjustment of the plow
spacing and the depth of the deep loosening, the
deep loose plow body is clamped on the connecting
frame through four 80 * 80 angle steel with a length
of 20cm, and fixed with a bolt. In the disassembly of
subsoiling plough, the machines can also support
small tractors used alone as a rotary tiller.
Figure 8: Subsoil plough connection frame.
4 DESIGN OF KEY PARTS OF
THE MACHINE APPLICATION
OF INTELLIGENT SUBSOILER
TESTING SYSTEM AND FIELD
EXPERIMENT OF THE
MACHINE
4.1 Application of Intelligent Deep Pine
Testing System
In order to carry out the supervision and inspection
of the deep pine operation more scientifically and
rationally, the intelligent control terminal is installed
on the machine. The terminal is mainly composed of
the depth sensor, machine tool recognition sensor,
camera, GPS antenna, display screen, main engine,
GPRS antenna and so on. The main engine and
display screen are installed in the tractor driver's cab,
and the tractor hand can get the depth of depth in
real time through the display screen. The host
computer mainly converts the information collected
by each sensor into a digital signal and uploads it to
the data management server through the GPRS
antenna. The supervisory staff can log in to the
supervisory service system interface through the
mobile phone or the computer and watch the real-
time operation scene of the equipment online. This
can be very convenient statistics and query the
comprehensive information about the operation of
the machine. The comprehensive information
includes depth of subsoiling, work area, compliance
and so on, which greatly saves the management of
economic costs.
Figure 9: Intelligent subsoil system interface.
4.2 Field test analysis
The machine was tested in the fields of red clay soil,
28.1% moisture content of soil and about kg/m
2
of
sugarcane leaf and weeds. After tested, 1SG-230
type rear-mounted subsoiling and rotary tillage
combined machine test performance indicators
measured results, as shown in Table 2. The
experiments show that: the performance of the
machine have reached the sugarcane field operations
requirements, knife shaft or stalk weeds less, and the
intelligent subsoiling detection terminal can
accurately measure the depth of subsoiling operation.
Development of 1SG-230 Type Intelligent Rear-Mounted Subsoiling and Rotary Tillage Combined Machine for Sugarcane Field
635

Table 2: Summary of test items.
Pilot projects Unit
Quality
Index
Results
The averagesubsoiler
depth
cm
35~45
38
Subsoil depth stability
coefficient
% ≥80 90.6
Depth detection
deviation of intelligent
terminal
% —— 2.1
The depth of rotary
tillage
cm 12 20
Stability coefficient of
rotary tillage
% ≥85 91
Soil crushing rate % ≥60 80.2
Work productivity hm
2
/h ≥0.2 0.82
Fuel consumption kg/hm
2
≤40 27.9
5 CONCLUSION
1SG-230 type rear-mounted subsoiling and rotary
tillage combined machine is based on the pre-design
1SG series deep loosening rotary tillage combined
machine for the study,and it was mainly designed
to the sugarcane leaf in the hot area which covers
more weeds and other vegetation. The machine
implements the effect of multi - use and saving the
time of agricultural production. The test was tested
to meet the requirements of the sugarcane field.
After the successful development of the machine,
combining with the application of intelligent
subsoiling detection system, the remote and precise
supervision of subsoiling quality is realized, which
greatly promoted the smooth development of the
subsoiling operation subsidy for agricultural
machinery.
ACKNOWLEDGEMENTS
This work was financially supported by the Hainan
Natural Science Foundation Project (317203).The
basic service charge of the Central Public Welfare
Research Institute (1630132017001);2016
Guangdong Provincial Department of Agriculture
Foreign Cooperation Project"China - Cambodia
Sugarcane Management Mechanization
Demonstration Base Construction"(Yue Nongji
[2016] No.28);Zhanjiang financial fund science and
technology special competitive distribution project
(2016A03020) and Collaborative innovation and
platform environment construction special of
Guangdong Province (2017A040406003).
REFERENCES
Qin-Fenglan. Sugarcane 's subsoiling and subsoiling
mechanization technology and benefit analysis.
Guangxi Agricultural Mechanization, 2014( 4):
24-27.
Luo-Quan, Zhao-Ming, Huang-Suqin. Study on the
mechanized cultivation technology of sugarcane [J].
Guangxi Agricultural Mechanization, 2015( 4):
11-14.
Xu-Shucai. Research on the Dynamic Characteristics of
Joint Ground Machine Based on Virtual Technology
[D]. Changchun, Jilin University. 2007.
Wei-Lijiao,Dong-Xuehu,Li-Ming,Zhang-Jiaming,Li-
Shaolong,Li-Rong,Huang-Chang,Lu-Jingming. Design
of 1SG-230 type Subsoiling and Rotary Tillage
Combined Machine for Sugarcane Field [J].
Agricultural Science in Guangdong, 2013,40 (13):
177-179.
Yang-Na. Study on the rotary tillage seeder with full layer
fertilization of deep pine in Maize [D].Baoding,
Agricultural University of Hebei.2015.
Hu-Lei. Study on design and Simulation of rotary parts
based on finite element technology[D].Kunming,
Kunming University of Science and Technology.2014.
Tang-Jintao. Design of blade type and power analysis
method of rotary tillage machete for micro tillage
machine [D].Chongqing, Chongqing University.2014.
Zhu-Liuxian. Finite element simulation and optimization
of rotary tillage knife for micro tillage machine based
on SPH algorithm [D].Chongqing, Southwestern
University.2012.
Zhang-Lang. The design and experimental study of the
vegetable combination finishing machine [D]. Nanjing.
Nanjing Institute of agricultural mechanization.2015.
He-Jin. Study on the combined operation machine for
seeding and sowing of Maize with no tillage [D].
Beijing, China Agricultural University.2005.
Wu-Haitao. Design and finite element analysis of
subsoiling machine based on CATIA. [D].Hefei,
Anhui Agriculture University.2013.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
636
