
Stability Analysis of Clock Synchronization
Algorithm over Lossy WSNs
Youmei Hu, Sijing Duan, Kuan Li, Xiaoquan Xu, Yueqin Wu and Kun Han
I
nstitution of Wireless Sensor Networks, Chongqing University of Posts and Telecommunications, Chongqing 400065, China
hu_youmei@163.com
Keywords: Wireless sensor networks, Kalman filter, missing observation, estimation error covariance, stability.
Abstract: Many Wireless sensor networks(WSNs) applications are dependent on clock synchronization technology.
The problem of loss of observations for clock synchronization based on Kalman filter estimation is discussed.
Firstly, the clock synchronization model of incomplete observation is obtained from the sensor clock reading
model. Then, according to the intermittent measurements, Kalman filter formula is deduced and the
estimating error covariance recurrence equation is obtained. Considering that the observation loss is random,
the statistical convergence of the error covariance is emphatically analyzed. Finally, we show the existence of
the critical packet arrival rate, and prove that when the actual packet arrival rate is higher than the critical
value, the mean estimation error covariance transitions from unbounded to bounded. Otherwise, we also give
the bounds of the covariance of the steady-state error and the boundary of the critical packet arrival rate.
Simulation results show the critical packet arrival rate determines the average error covariance transition from
unbounded to bounded.
1 INTRODUCTION
Wireless sensor networks(WSNs) facilitate its
deployment, low cost and high adaptability to the
environment which have been widely used in
medical health monitoring, smart home, and
environmental monitoring(Akyildiz, 2002). These
applications require a large number of synchronized
nodes through the coordination of the
implementation of a distributed task, so the sensor
nodes have a unified time frame which is very
important. However, different sensor nodes are
affected by factors such as hardware timing device,
ambient temperature and other factors. As time goes
on, the clocks between nodes will have different
deviations. Clock synchronization algorithms (Wu Y
C,2011 and Tao, 2012 and Wakabayashi, 2013) are
the key technology to achieve the sensor network
which has the same time, its core is the estimation of
clock parameters, Kalman filter algorithm is used to
estimate the clock parameters. In the wireless sensor
network clock synchronization technology, this paper
uses two-way information exchange mechanism to
obtain the observations sent by neighbor nodes. Due
to the unreliability of the wireless network, the
synchronization node will randomly lose the key
observation, then, the stability of the Kalman filter
will be greatly affected. This paper is very interested
in the loss of observations of the Kalman filter
estimation process.
The author have built the state transition equation
with relative clock offset and fixed time delay in
(Wang, 2014), and have analyzed the presence of
Kalman filtering estimation packet loss, they believe
that when the measured value misses, the Kalman
filter is not updated, then the sampling period is
random and the discussion based on random
sampling convergence properties in (Micheli, 2001)
and (Micheli and Jordan, 2002). With the (Wang,
2015), the Kalman filter update step and the error
covariance iteration are random and all depend on the
random arrival of the measured values. The authors
build the Markov model with packet loss and
establish the sufficient and necessary conditions for
the stability based on the peak covariance stability
theory in (Alexiadis, 1999). The authors of research
(Moayedi, 2010) studied adaptive Kalman filtering,
and took the mixed uncertainty of measured-value
latency and packet loss into account. It is a novel
research field to study the effect of loss of
measurement on clock synchronization stability. In
this paper, focus on any pair of sensor nodes which
can be used in sensor networks, and establish the
Hu, Y., Duan, S., Li, K., Xu, X., Wu, Y. and Han, K.
Stability Analysis of Clock Synchronization Algorithm over Lossy WSNs.
In 3rd International Conference on Electromechanical Control Technology and Transportation (ICECTT 2018), pages 223-227
ISBN: 978-989-758-312-4
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
223

clock synchronization model of incomplete
observation. The error covariance iterative equation
of the prior form is obtained by re-deriving the
Kalman filter process based on the loss of observed
valued. Since the random measurement is missing,
the error covariance iteration is a random process, so
this paper studies the statistical properties of the
estimation error covariance.
2 PROBLEM FORMULATION
We consider two sensor node
{
}
,
ij
SS
, which can
communicate with each other in the sensor network.
Because of the crystal oscillator and the sensor itself
is different, so each sensor node has one analogy
clock. The discrete clock reading model is follow as:
[
]
00
() ( 1) () 1
iii
ck k k k
τϑ
β
τ
=+ −+ −
(1)
Where
0
τ
is sampling period,
()
i
k
ϑ
and
()
i
k
β
denote the accumulated clock offset and
instantaneous clock skew of the node
i
S
at the
k
sampling, respectively.
In order to achieve sensor node clock
synchronization, we assume that the clock reading of
node
j
S
is accurate, and the node
i
S
is the node to be
synchronized at any time, Then the goal of clock
synchronization is to correct the clock read
()
i
ck
of
node
i
S
as node
j
S
clock reading. According to the
discrete clock reading model, the primary task of
clock synchronization is to track the clock skew
and
the accumulated clock offset.
We choose
() [ () ()]
T
iii
x
kkk
βϑ
=
as the state variable,
can be used to obtain the
i
S
clock parameter evolution
model:
() ( 1) ()
ii i
x
kAxk wk=−+
(2)
Where the state transition matrix
0
0
1
a
A
a
τ
⎡
⎤
=
⎢
⎥
⎣
⎦
,
process noise is
()
i
wk , and satisfies
[()]0
i
Ew k =
,
2
2
[() ()] I
T
ii
Ew kw k
σ
=
.
In order to establish the relationship between
adjacent nodes, the timestamp exchange process can
be modeled as:
{, } {, } {, }
21
() ()
ij ij ij
jiijk
TtTtdX
ϑϑ
−=−++
(3)
{, } {, } {, }
34
() ()
ij ij ij
jiijk
TtTtdY
ϑϑ
−=−−−
(4)
Where
ij
d
is the fixed time-delay part when the
node
i
S
and the node
j
S
are performing bidirectional
information exchange, and
{, }ij
k
X
and
{, }ij
k
Y
denote the
variable delay part. Variable delay involves a large
number of independent stochastic processes, so
suppose
{, }ij
k
X
and
{, }ij
k
Y
are independent identically
distributed Gaussian random variables with mean 0
and variance
2
σ
.
The actual wireless sensor network has a series of
unreliable factors, often resulting in the time stamp in
the transmission process of delay or loss. The binary
variable
γ
k
is introduced to indicate whether the
observed value at time
k
reaches the destination node,
γ 1
k
=
indicates that the observed value reaches the
destination node successfully, and
γ 0
k
=
indicates
that the observed value is lost, and the observed
packet loss at different time is independent of each
other.
Simultaneous expressions (3) and (4), the
intermittent observation model is expressed as:
,
γ (() ())
ik k i i
y Cxk vk=+
(5)
Where
{, } {, }
,,
ij ij
krk sk
yT T=−
,
[
]
02C =−
,
()
i
vk
is
Gaussian white noise with mean zero and covariance
R
.
3 STATISTICAL PROPERTIES OF
ITERATIVE OF ERROR
COVARIANCE
In WSNs, there will inevitably be a loss of
observations, and seriously affect the stability of the
estimation based on Kalman filter. In this paper, we
focus on the influence of missing values on the
estimation stability based on Kalman filter, and then
get the influence of missing values on the clock
synchronization stability.
According to the intermittent observation model,
the covariance of the output noise is defined as:
2
(0,R), 1
(0, I), 0
k
tk
k
N
P
N
=
⎧
⎨
=
⎩
( | )=
γ
νγ
σγ
(6)
When the observed value is lost, the destination
node is equivalent to receiving a noise with a
variance of infinity. Next, we re-derive the Kalman
filtering process based on the loss of observed values,
the kalman filter is as follows:
Prediction step:
1| |kk kk
x
Ax
+
=
)
)
(7)
1| |
T
kk kk
P
AP A Q
+
=+
(8)
When the observations are lost, the
σ
in the
Kalman gain tends to infinity, then
21
() 0I
σ
−
→
, the
update step becomes:
1| 1 1| 1 1 1 1|
()
kk kk k k k kk
xx KyCx
γ
++ + + + + +
=+ −
)
))
(9)
1| 1 1| 1 1 1|kk kk k k kk
P
PKCP
γ
++ + + + +
=−
(10)
The Kalman gain is
1
11| 1|
()
TT
kkk kk
K
PCCPC R
−
++ +
=+
.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
224

Substituting (10) into (7) and for simplicity, let
11|kkk
PP
++
=
, then we can get the iterative formula of
k
P
:
1
1
()
TTTT
kk kkk k
P
AP A Q AP C CP C R CP A
γ
−
+
=+− +
(11)
For any initial value
0
P
, the error covariance
sequence
0
{}
kk
γ
∞
=
is also random, since the observed
arrival sequence
{}
0
k
k
P
∞
=
is random. Therefore, this
paper studies the statistical properties of error
covariance, focusing on the convergence of
1
[]
k
EP
+
.
1
[|]
kk
E
PP
+
is modelled as a modified Riccati
differential equation (MARE):
1
() ( )
TTTT
g
X AXA Q AXC CXC R CXA
λ
λ
−
=+− +
(12)
Where
Pr[ 1]
k
λγ
==
is the statistical probability of
arrival of the observed value.
Since
11
[] [[ |]] [()]
kkk k
E
PEEPPEgP
λ
++
==
, the statistical
convergence of
1
[]
k
EP
+
is obtained by analysing the
convergence of
[()]
k
E
gP
λ
.
4 STABILITY ANALYSIS
The estimated stability directly reflects the stability
of the clock synchronization. If the clock parameters
are estimated inaccurately, the logical clock of the
sensor nodes will not be synchronized, and a series of
tasks that rely on clock synchronization will not be
completed. So this section of the clock parameter
estimation for the stability analysis of the target is to
ensure process stability under the premise of Kalman
filter, calculate the minimum value of the arrival rate
of observation that is, the critical observations of
arrival rate, also calculate the convergence range of
error covariance matrix.
In order to facilitate the proof of the theorem, we
give an auxiliary function:
(, ) (1 )( ) ( )
TT
K
X AXA Q FXF V
λλ
Φ=− ++ +
(13)
Where
F
AKC=+ ,
T
VQKRK=+
,
0
nn
X
×
=≥
,
0R ≥ and
0Q ≥
。
In this section, theorem 1 is given to prove the
convergence of MARE, that is, the Riccati
differential equation is bounded in the steady state,
and then we prove that the steady-state mean error
covariance matrix
1
[|]
kk
E
PP
+
is bounded.
Theorem 1: According to the auxiliary function
(, )KXΦ
, suppose there exists a matrix
ˆ
K
and a
positive definite matrix
ˆ
P
, and satisfy
ˆ
0P >
and
ˆˆˆ
(,)
P
KP>Φ
, then:
A. For any initial value
0
0P ≥
, MARE converges,
and the convergence value is independent of the
initial value, that is
0
lim lim ( )
t
t
tt
P
gP P
λ
→∞ →∞
==
.
B.
P
is the only positive definite solution of
MARE.
Theorem 2 gives the conditions for the existence
of the critical arrival rate
c
λ
. When
kc
λλ
>
, for all
initial conditions, the mean state covariance
[]
k
E
P
is
bounded; when
kc
λλ
≤
, for any initial condition, the
mean state covariance divergence.
Theorem 2: if
()
1/ 2
,AQ
is controllable,
()
,
A
C
can be observed, then there is
[0,1]
c
λ
∈
, satisfying:
[
]
lim
t
t
EP
→∞
=+∞
, for
0
c
λλ
≤≤
and
0
0P∃≥
;
[
]
0
lim
tP
t
E
PM
→∞
≤
, for
1
c
λλ
≤≤
and
0
0P∀≥
;
Where
0
0
P
M ≥
, dependent on initial conditions
0
0P ≥
.
Theorem 3 gives the expression of the lower
bound and upper bound of the arrival rate
c
λ
of
critical observations.
Theorem 3: If the critical observation arrival rate
c
λ
exists, then:
2
1
argin | (1 ) 1fSS ASAQ
a
⎡⎤
=∃=−+=−
⎣⎦
)) )
λ
λλ
(14)
arg in ( , ) | ( , )
f
KX X KX
λ
λ
⎡
⎤
=∃ >Φ
⎣
⎦
)
)) ))
(15)
Where
max | |
ii
a
σ
=
and
i
σ
is the eigenvalue of
matrix
A
, namely
c
λλ λ
≤≤
.
The calculation of the upper bound of the critical
measurement value is equivalent to an iterative
process of LMI feasibility problem. The feasibility of
LMI is shown as follows.
If
()
1/ 2
,AQ
is controllable,
()
,
A
C
is observable,
assuming that
K
and
0X >
are present and that
(, )
X
KX>Φ
is satisfied. Let
F
AKC=+
, then:
(1 )
TT T
XAXAFXFQKRK
λλ λ
>− + ++
,
Using the Shure complement decomposition, we
get:
()1
(, ) ( ) 0 0
10
TTT
T
YYAZCYA
YZ AY CZ Y
AY Y
λ
λλ
λ
λ
⎡⎤
+−
⎢⎥
Ψ= + >
⎢⎥
⎢⎥
−
⎢⎥
⎣⎦
Since
(, ) (,)aY aK a Y KΨ=Ψ
, must be bound
YI≤
.
In summary, the upper bound of the critical
measurement arrival rate
λ
is the solution of the
following optimal problem:
arg min ( , ) 0 0YZ Y I
λ
λ
λ
=Ψ> ≤≤
(16)
For an ideal communication network, if
()
,
A
Q
is
stable and
()
,
A
C
is observable,
k
P
will converge to
a certain value. However, for lossy communication
networks, there will be no uniquely determined error
covariance matrix at Kalman filter steady state, and
only the boundary of the mean estimation error
Stability Analysis of Clock Synchronization Algorithm over Lossy WSNs
225
covariance
[]
t
E
P
can be calculated. Theorem 4 gives
the expression of the lower bound and upper bound of
the mean error covariance
[]
k
E
P
at steady state.
Theorem 4: Suppose that
1/ 2
(, )AQ
is controllable
,
(, )AC
is observable, and
λλ
>
is satisfied. Then,
for
0
[]0EP ≥ , there exists
0 lim [ ] lim
kk k
kk
SSEPV V
→∞ →∞
<=≤≤=
.
Where
S
is the solution of the equation
(1 )
T
SASAQ
λ
=− +
,
V
is the solution of the equation
()VgV
λ
=
.
The lower bound of average error covariance
equation is
S
, it is easy to think of the use of
standard Lyapunov equation. For the upper bound of
the mean error covariance,
V
is obtained by solving
the equivalent semidefinite programming problem.
Assuming
λλ
>
, the solution of matrix
()VgV
λ
=
is obtained by the following optimal problem:
arg max ( )
.. 0
v
TT
TT
Trace V
AVA V AVC
st
CVA CVC R
λ
λ
⎧
⎪
⎪
⎡⎤
⎨
−
≥
⎢⎥
⎪
+
⎢⎥
⎪
⎣⎦
⎩
Where
0
TT
TT
AVA V AVC
CVA CVC R
λ
λ
⎡⎤
−
≥
⎢⎥
+
⎢⎥
⎣⎦
is derived from
the decomposition of
()VgV
λ
≤
using Shure.
5 NUMERICAL SIMULATION
The wireless sensor network clock synchronization
model is denoted as
(, , ,)ACQR
, where
1.25 0
11
A
⎡
⎤
=
⎢
⎥
⎣
⎦
,
[
]
02C =−
, 2.5R = ,
22
100 IQ
×
=
. Since the observation
matrix C is irreversible, then there is no
ˆ
K
, so that the
ˆ
F
AKC=+
is equal to the zero matrix. In this case,
the critical measurement arrival rate can’t be
calculated exactly, so only the lower and upper
bounds can be calculated. The green and purple solid
line in Figure 1 represents the lower and upper bound
of the critical measurement arrival rates, respectively.
By theorem 2, the lower bound of the critical arrival
rate is
0.36
λ
=
. In this paper, when the observed
arrival rate is 0, the error covariance infinity, it is
clear that, with the actual observation of the arrival
rate gradually increased, when equal to 0.36, the
average error covariance lower bound sharp decline,
approximately converges at
0.6
λ
=
. Similarly, the
upper bound of the mean error covariance begins to
decrease at
λλ
=
, and eventually converges.
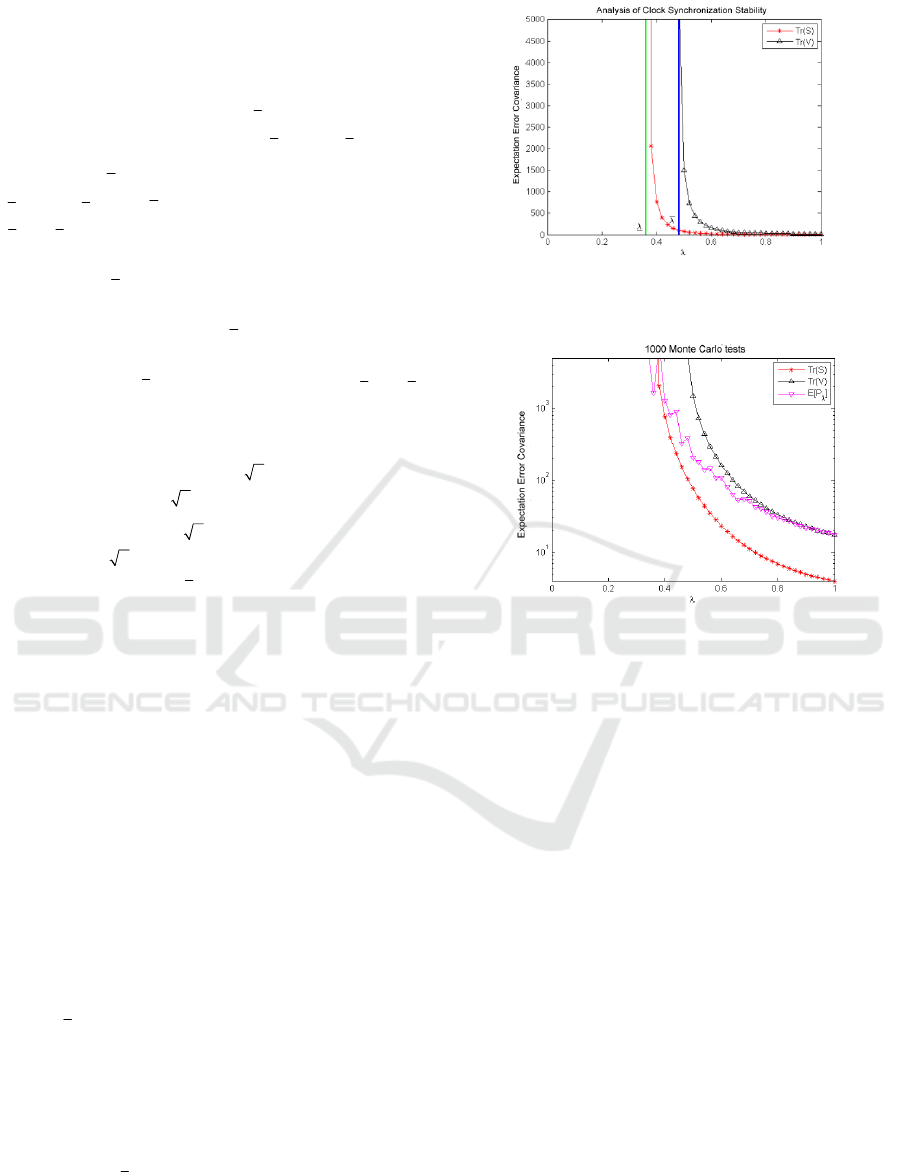
Figure.1. Upper and lower bounds transition from
unbounded to bounded
Figure.2. Monte Carlo test
The Monte Carlo simulation is used to simulate
the real clock synchronization process. The inverted
triangle curve in Figure. 2 represents the
synchronization error covariance
[]
k
E
P
, which is
obtained from 1000 Monte Carlo experiments. The
star of red curve and the black positive triangle curve
represents the lower bound and upper bound of the
steady-state error covariance, respectively, calculated
by the modified Riccati differential equation. In this
paper, when the actual arrival rate is 0,
lim [ ]
k
k
EP
→∞
is
equal to infinity. It is obvious that the
synchronization error covariance based on Kalman
filter is a monotonically decreasing function of the
arrival rate. Note that when
0.36
λ
=
, the
synchronization error covariance into the lower and
upper bound including area, when the measured
arrival rate is larger than the critical value, the
synchronization error covariance convergence, and
its convergence range in the lower and upper bound,
to prove the correctness of the theory.
The article propose a static state estimator for
linear systems:
11
γ ()
ss
tttstt
x
Ax K y y
++
=+ −
)
))
(17)
Where,
s
K
represents the static gain constant.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
226
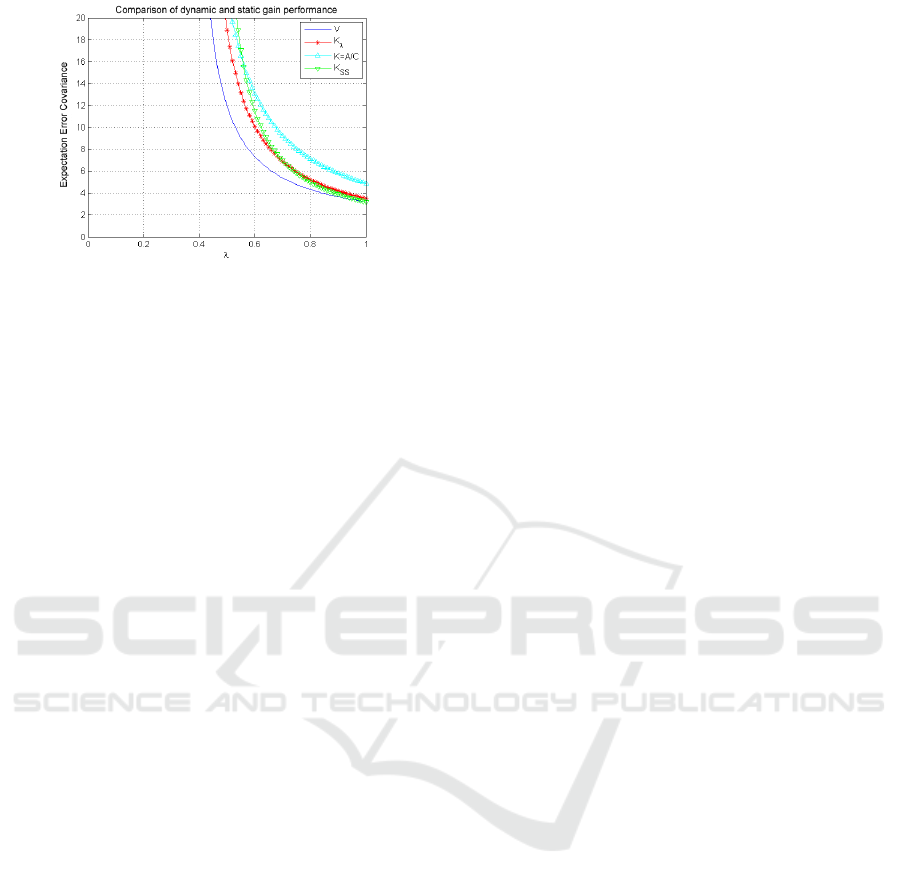
Figure.3. Comparison of dynamic and static gain
performance
Three static gain methods are proposed in the
reference (Sinopoli, 2004), and the Kalman filter
gain in this paper belongs to the dynamic gain. By
comparing the performance of these three kinds of
static gain, it is shown that the Kalman filter is still
the best when the measurement value is lost. Figure 3
compares the performance between the dynamic
Kalman filter gain and three kinds of static gain, the
star of red curve represents the average error
covariance of dynamic gain, with the actual
observation arrival rate increases, the most close to
the upper bound of convergence theory analysis. It is
shown that the steady-state error covariance is
minimum and the estimation algorithm is optimal.
6 CONCLUSIONS
This paper prove that there exists the critical arrival
rate of the measured value, and the average error
covariance changes from unboundedness to
boundedness with the arrival rate of the actual
measured value increasing and exceeding the critical
arrival rate. A numerical algorithm is proposed to
calculate the upper and lower bound of the critical
arrival rate and the boundary of the steady-state mean
error covariance. The simulation results show that the
average error covariance divergence and the clock
parameter estimation are unstable when the actual
measured value arrival rate is less than the
critical value. This theory can also guide the resource
allocation of wireless sensor networks. If the current
synchronization accuracy does not meet the
requirements, we can get better synchronization
accuracy by improving the communication resources.
REFERENCES
F Akyildiz, W.Su, Y.Sankaresubramaniam, and
E.Cayirci, 2002.Wireless sensor networks: a
survey[J]. Computer Networks, vol. 38, no. 4,
pp. 393-422.
Wu Y C, Chaudhari Q, Serpedin E.,2011. Clock
synchronization of wireless sensor netwoks[J].
IEEE Signal Processing Magazine, 28(1):
124-138.
Tao Zhi Yong, Ming Hu., 2012. Improvement Based
on the Hierarchical Levels Structure of the TPSN
Algorithm[J]. Chinese Journal of Sensors and
Actuators,5: 027.
Wakabayashi K, Isogai A, Watanabe D, et al., 2013.
Involvement of methionine salvage pathway
genes of Saccharomyces cerevisiae in the
production of precursor compounds of dimethyl
trisulfide (DMTS)[J]. Journal of bioscience and
bioengineering, 116(4): 475-479.
Wang T, Cai C Y, Guo D, et al., 2014. Clock
Synchronization in Wireless Sensor Networks: A
New Model and Analysis Approach Based on
Networked Control Perspective[J]. Mathematical
Problems in Engineering,(2014-8-31), 2014,
2014(3):1-19.
M. Micheli, 2001. Random Sampling of a
Continuous-time Stochastic Dynamical System:
Analysis, State Estimation, Applications,
Master’sThesis, University of California,
Berkeley.
M. Micheli and M. I. Jordan, 2002. Random
Sampling of a continuoustime stochastic
dynamical system, Proc. 15th Intl. Symposium on
the Mathematical Theory of Networks and
Systems (MTNS).
Wang T, Guo D, Cai C Y, et al., 2015. Clock
Synchronization in Wireless Sensor Networks:
Analysis and Design of Error Precision Based on
Lossy Networked Control Perspective [J].
Mathematical Problems in Engineering,
2015,(2015-4-8), 2015(2):1-17.
M.Alexiadis, P. Dokopoulos, and H. Sahsamanoglou,
1999. “Wind speedand power forecasting based
on spatial correlation models” IEEETrans.
Energy Convers., vol. 14, no. 3, pp. 836–842.
N N.M. Moayedi, Y. Foo, and Y. Soh, 2010. Adaptive
Kalman filtering in networked systems with
random sensor delays, multiple packet dropouts
and missing measurements[J]. IEEE Trans.
Signal Process., vol. 58, no.3, pp. 1577–1588.
Sinopoli B, Schenato L, Franceschetti M, et al., 2004.
Kalman filtering with intermittent observations
[J]. IEEE Transactions on Automatic Control,
1(9):1453-1464.
Stability Analysis of Clock Synchronization Algorithm over Lossy WSNs
227
