
Deep Learning in EMG-based Gesture Recognition
P. Tsinganos
1
, B. Cornelis
2
, J. Cornelis
2
, B. Jansen
2
and A. Skodras
1
1
University of Patras, Department of Electrical and Computer Engineering, 26504 Patras, Greece
2
Vrije Universiteit Brussel, Department of Electronics and Informatics, 1050 Brussels, Belgium
Keywords:
sEMG, Gesture Recognition, Deep Learning, CNN.
Abstract:
In recent years, Deep Learning methods have been successfully applied to a wide range of image and speech
recognition problems highly impacting other research fields. As a result, new works in biomedical engineer-
ing are directed towards the application of these methods to electromyography-based gesture recognition. In
this paper, we present a brief overview of Deep Learning methods for electromyography-based hand gesture
recognition along with an analysis of a modified simple model based on Convolutional Neural Networks. The
proposed network yields a 3% improvement on the classification accuracy of the basic model, whereas the
analysis helps in understanding the limitations of the model and exploring new ways to improve the perfor-
mance.
1 INTRODUCTION
Over the last decades there has been particular inte-
rest in gesture recognition for human-computer inte-
raction (HCI). This particular combination finds many
applications, including sign language recognition, ro-
botic equipment control, virtual reality gaming, and
prosthetics control (Cheok et al., 2017). Among
the various sensor modalities that have been used to
capture hand gesture information, electromyography
(EMG) is considered more appropriate since it captu-
res the muscle’s electrical activity; the physical phe-
nomenon that results in hand gestures. EMG data can
be recorded either with invasive or non-invasive met-
hods. Surface electromyography (sEMG) is a techni-
que that measures muscle’s action potential from the
surface of the skin, contrary to invasive methods that
penetrate the skin to reach the muscle.
A popular approach to sEMG-based gesture re-
cognition consists of using pattern recognition met-
hods derived from Machine Learning (ML) (Scheme
and Englehart, 2011). Conventional ML pipelines in-
clude data acquisition, feature extraction, model defi-
nition and inference. Acquisition of sEMG signals in-
volves one or more electrodes attached around the tar-
get muscle group. The features used for classification
are usually hand-crafted by human experts and cap-
ture the temporal and frequency characteristics of the
data. Typical features that have been used for sEMG
pattern classification are shown in Table 1. These ex-
tracted features serve as the input to ML classifiers,
such as k-Nearest Neighbors (kNN), Support Vector
Machines (SVM), Multi-Layered Perceptron (MLP),
Linear Discriminant Analysis (LDA), and Random
Forests (RF), where the classifiers parameters are ad-
justed towards accurate classification.
Deep Learning (DL) is a class of ML algorithms
that has revolutionized many fields of data analysis
(Goodfellow et al., 2016). For example, Convoluti-
onal Neural Networks (CNNs) and Recurrent Neu-
ral Networks (RNNs) were successfully deployed for
image classification and speech recognition tasks, re-
spectively. DL methods differ from conventional ML
approaches in that feature extraction is part of the mo-
del definition, therefore obviating the need for hand-
crafted features. Although these methods are not new
(Goodfellow et al., 2016), they recently gained more
attention due to the increased availability of abundant
data and vast improvements in computing hardware
allowing these computationally demanding methods
to be executed in less time.
Motivated by the progress of DL methods we pro-
vide an overview of the application of these methods
to sEMG pattern classification problems and propose
modifications to a simple CNN model (Atzori et al.,
2016). The comparison with the state of the art and
the analysis of the results sheds light on how the ar-
chitecture performs and allows for improvements to
be made.
The remaining of the paper is organized as fol-
lows. In Section 2, we provide an overview of the re-
lated gesture recognition approaches. Section 3 gives
Tsinganos, P., Cornelis, B., Cornelis, J., Jansen, B. and Skodras, A.
Deep Learning in EMG-based Gesture Recognition.
DOI: 10.5220/0006960201070114
In Proceedings of the 5th International Conference on Physiological Computing Systems (PhyCS 2018), pages 107-114
ISBN: 978-989-758-329-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
107

a detailed description of the proposed CNN architec-
ture. The experiments performed for the evaluation of
the model are presented in Section 4, while the results
and a brief discussion are given in Section 5. Finally,
in Section 6 we conclude the paper and outline our
future work.
2 RELATED WORK
There exists a great body of literature on the problem
of sEMG-based hand gesture recognition. One can
discriminate between approaches that use conventio-
nal ML techniques and studies based on deep learning
methods.
The most significant study on sEMG classifica-
tion with traditional ML techniques is the work des-
cribed in (Hudgins et al., 1993). For every 200ms
segment of 2 channel sEMG signals, 5 time-domain
features are extracted and fed to an MLP classifier,
achieving an accuracy of 91.2% on the classification
of 4 hand gestures. Later approaches based on this
work improve the classification performance by using
more features or different classifiers. In (Englehart
and Hudgins, 2003), the same set of features is ex-
tracted from 4 channel sEMG signals and fed to an
LDA classifier. The average accuracy obtained is gre-
ater than 90% and is further improved by applying a
majority vote window to the predictions of the clas-
sifier. The work presented in (Castellini et al., 2009)
achieves a 97.14% accuracy on the task of classifying
3 types of grasp motions using the RMS value from 7
electrodes as the input to an SVM classifier. In (Ku-
zborskij et al., 2012), a set of time- and frequency-
domain features is extracted from 8 channel myoe-
lectric signals and evaluated with various classifiers.
This experiment is considered the first successful ap-
proach for the classification of a large number of hand
gestures, since they achieve high accuracy (70-80%)
on a set of 52 hand gestures (Ninapro dataset (Atzori
et al., 2015)) using any of the proposed features and
an SVM classifier with RBF kernel. This work was
further improved in (Atzori et al., 2014) by conside-
ring linear combination of features and using a RF
classifier resulting in an average accuracy of 75.32%.
In (Gijsberts et al., 2014), different kernel classifiers
were evaluated jointly on EMG and acceleration sig-
nals, improving the classification accuracy by 5%.
Considering the advancements of DL methods in
the fields of image processing and speech recogni-
tion, many works have investigated their application
to EMG-based hand gesture recognition. In (Shim
and Lee, 2015) and (Shim et al., 2016), the authors
propose a Deep Belief Network (DBN) classifier as
a more effective model compared to a shallow MLP
network trained with back-propagation. Time-domain
features are extracted from segments of 2 channel
EMG signals which are used to train the model in a
layer-by-layer fashion, either with a greedy approach
or using genetic algorithms, achieving an accuracy of
88.59% and 89.29% respectively on a set of 5 mo-
vements.
The first end-to-end DL architecture, however,
was proposed by (Park and Lee, 2016). The authors
built a CNN-based model for the classification of six
common hand movements resulting in a better classi-
fication accuracy compared to SVM. In (Atzori et al.,
2016), a simple CNN architecture based on 5 blocks
of convolutional and pooling layers is used to clas-
sify a large number of gestures. The classification
accuracy is comparable to those obtained with clas-
sical methods, though not higher than the best per-
formance achieved on the same problem using a RF
classifier. The works of (Geng et al., 2016) and (Wei
et al., 2017) improve their results across various da-
tasets incorporating dropout (Srivastava et al., 2014)
and batch normalization (Sergey and Szegedy, 2015)
techniques in their methodology. Apart from choo-
sing different model architectures, other differences
to previous works consist of using a high-density elec-
trode array to capture EMG data. Using instantaneous
EMG images, (Geng et al., 2016) achieves a 89.3%
accuracy on a set of 8 movements, going up to 99.0%
when using majority voting over 40ms windows. In
(Wei et al., 2017), the observation is made that a small
group of muscles play a significant role in some mo-
vements. Therefore, a multi-stream CNN architecture
is employed, where the input is divided into smaller
images that are separately processed by convolutio-
nal layers before being merged with fully connected
layers. With this model the reported accuracy on the
Ninapro dataset is improved by 7.2% (from 77.8% to
85%).
Later works deal with the problem of inter-subject
classification, i.e. where the train and test data
come from different subjects, either with recalibra-
tion ((Zhai et al., 2017)) or model adaptation ((Du
et al., 2017), (C
ˆ
ot
´
e-Allard et al., 2018)). The per-
formance of the network proposed in (Zhai et al.,
2017), which takes as input downsampled spectro-
grams of EMG segments, is improved by updating
the network weights using the predictions of previ-
ous sessions corrected by majority voting. In (Du
et al., 2017) it is assumed that the weights of each
layer of the network contain information that allows
for differentiation between gestures, while the mean
and variance of the batch normalization layers cor-
respond to discriminating between sessions/subjects.
PhyCS 2018 - 5th International Conference on Physiological Computing Systems
108
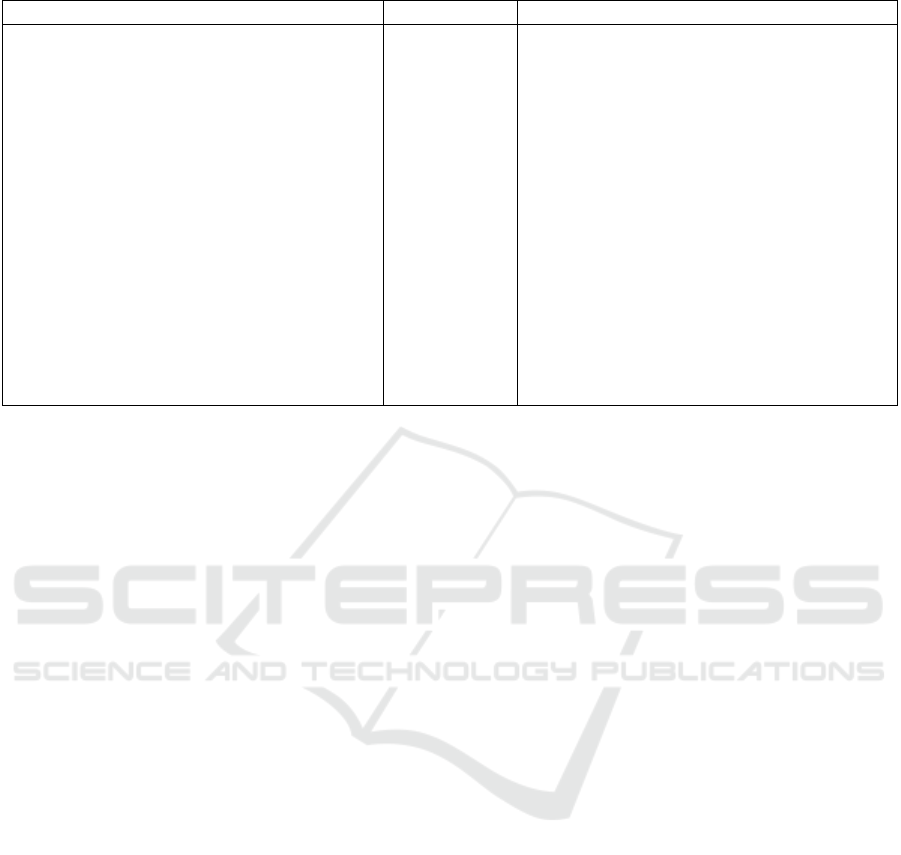
Table 1: Typical sEMG features.
Feature Domain Reference
Root Mean Square time (Castellini et al., 2009)
Variance time (Kuzborskij et al., 2012)
Mean Absolute Value time (Kuzborskij et al., 2012) (Atzori et al., 2014)
(Hudgins et al., 1993) (Englehart and Hudgins,
2003)
Zero Crossings time (Atzori et al., 2014) (Hudgins et al., 1993) (Eng-
lehart and Hudgins, 2003)
Slope Sign Changes time (Atzori et al., 2014) (Hudgins et al., 1993) (Eng-
lehart and Hudgins, 2003)
Waveform Length time (Kuzborskij et al., 2012) (Atzori et al., 2014)
(Hudgins et al., 1993) (Englehart and Hudgins,
2003)
Histogram time (Kuzborskij et al., 2012) (Atzori et al., 2014)
(Hudgins et al., 1993) (Englehart and Hudgins,
2003)
Short Time Fourier Transform frequency (Kuzborskij et al., 2012) (Englehart et al., 1999)
Cepstral coefficients frequency (Kuzborskij et al., 2012)
Marginal Discrete Wavelet Transform time-frequency (Kuzborskij et al., 2012) (Atzori et al., 2014)
Therefore, they apply adaptive batch normalization
(AdaBN) (Li et al., 2016), where only the normali-
zation statistics are updated for each subject using a
few unlabeled data. The results show improved per-
formance compared to a model without adaptation.
The authors of (C
ˆ
ot
´
e-Allard et al., 2018) use transfer
learning techniques to exploit inter-subject data lear-
ned by a pre-trained source network. In their archi-
tecture, for each subject a new network is instantia-
ted with weighted connections to the source network.
Through this technique, which achieves an accuracy
of 98.31% on 7 movements, predictions for a new
subject are based both on previously learned informa-
tion and subject-specific data.
3 PROPOSED MODEL
The problem of sEMG-based hand gesture recogni-
tion can be formulated as an image classification pro-
blem using CNNs, where the input sEMG image has
a size of H × W × 1 (height×width×depth). Vari-
ous approaches have been employed to construct an
sEMG image. For example, in the works of (Geng
et al., 2016), (Wei et al., 2017), and (Du et al., 2017),
the instantaneous sEMG signals from a high density
electrode array have been used, where the width and
the height of the array match the dimensions of the
image. In addition, sEMG images can be constructed
with segments of sEMG signals using (overlapping)
time-windows, in which case the width matches the
number of electrodes and the height is equal to the
window length (Atzori et al., 2016). Another ap-
proach is based on spectrograms using the STFT of
sEMG segments, where for each channel of the EMG
a spectrogram is created resulting in an image of size
frequency×time-bins×channels (Zhai et al., 2017),
(C
ˆ
ot
´
e-Allard et al., 2018).
In this paper, we adhere to the approach of (Atzori
et al., 2016) and generate sEMG images with sliding
windows. These images are created using a window
length of 150ms and an overlap of 60%, i.e. 90ms, in
order to make fair comparisons with previous works
in the literature that use similar time-windows. The-
refore, the input EMG image has a size of 15×10
(height × width), where the height dimension corre-
sponds to the window length (i.e. 150ms sampled at
100Hz) and the width equals the number of electro-
des.
The proposed CNN (depicted in Fig. 1) is based
on the architecture proposed in (Atzori et al., 2016)
with modifications to increase the models classifica-
tion accuracy. The main adjustments in the architec-
ture are the introduction of dropout (Srivastava et al.,
2014) layers and the use of max pooling instead of
average pooling, while the number of trainable para-
meters remains the same.
The CNN architecture has 4 hidden convolutional
layers and 1 output layer. The first two hidden lay-
ers consist of 32 filters of size 1×10 and 3×3. The
third consists of 64 filters of size 5×5. The fourth
layer contains 64 filters of 5×5 size, whereas the last
one is a G-way convolutional layer with 1×1 filters,
where G is the number of gestures to be classified.
Zero padding is applied before the convolutions of the
hidden layers, which are followed by rectified linear
unit (ReLU) non-linearities and dropout layer with a
probability of 0.15 for zeroing the output of a hidden
unit. In addition, a subsampling layer performs max
Deep Learning in EMG-based Gesture Recognition
109
Figure 1: The proposed model architecture is based on the work of (Atzori et al., 2016) with modifications that were found to
improve the classification accuracy.
pooling over a 3×3 window after the dropout of the
second and third layers. Finally, the last convolutional
layer is followed by a softmax activation function.
The weights were initialized with the Xavier initi-
alizer (Glorot and Bengio, 2010) and a weight decay
(l
2
regularization) of 0.0002 was applied during trai-
ning. Network parameters were identified via cross-
validated random search and manual hyper-parameter
tuning on a validation set composed of three subjects
randomly selected from the first dataset (DB-1) of the
Ninapro database (Atzori et al., 2014). This data-
set contains 10 repetitions for each gesture, therefore
approximately 2/3 of the repetitions was used as the
train set and the remaining repetitions consisted the
test set. In each fold of the cross-validation, EMG
data from one repetition of the training set were used
as test data and the rest repetitions for training. The
hyper-parameter search space included weight decay,
dropout rate, pooling method, kernel initializer, whe-
reas stride and padding values were computed such
that the size of the output tensor is correct. The se-
arch space along with the selected values are listed in
Table 2. In addition, the proper optimizer parameters
were found in the same fashion for each evaluation
method.
The EMG signals were preprocessed as follows.
Firstly, a 1st order 1 Hz low-pass Butterworth filter
was applied as in previous studies on Ninapro da-
tabase ((Atzori et al., 2016), (Geng et al., 2016)).
Then, EMG data were segmented into overlapping
windows of 150ms length and 90ms overlap, which
can be considered as a form of data augmentation si-
milar to image shifting. Additionally, data were aug-
mented during training by adding Gaussian noise to
each image with a signal to noise ratio (SNR) equal
to 25dB.
Due to the recording process followed in the Ni-
napro database, each gesture repetition is followed by
a rest phase, meaning that the majority of the images
correspond to the ‘rest’ gesture. In addition, there are
variations in the duration of the gesture repetitions,
which affects the number of generated images. The-
refore, accounting for the fact that gestures are not
equally represented in the dataset, two steps are taken
Table 2: Hyperparameter tuning.
Parameter Search space Selected value
Weight decay [0.0001, 0.001] 0.0002
Dropout [0, 0.333] 0.15
Pool method ‘max’,
‘average’
‘max’
Kernel initiali-
zer
‘glorot’, ‘he’,
‘normal’, ‘uni-
form’
‘glorot’
Optimizer ‘SGD’, ‘Adam’ ‘SGD’
Learning rate [0.001, 0.1] 0.05
Learning sche-
dule
‘constant’, ‘step
decay’, ‘expo-
nential decay’
‘step decay’
Epochs [30,150] 100
Batch size 32, 64, 128,
256, 512, 1024
512
to deal with the imbalance problem. First, the EMG
data of the ‘rest’ gesture are subsampled, such that the
same number of repetitions is shared between all ge-
stures. Secondly, during training the loss function is
weighted such that the network pays more attention to
under-represented gestures.
4 EXPERIMENTS
The proposed CNN architecture is evaluated on data
from the Ninapro database that includes EMG data re-
lated to 53 hand movements of 78 subjects (11 trans-
radial amputees, 67 intact subjects) divided into three
datasets. The Ninapro DB-1 includes data acquisiti-
ons of 27 intact subjects (7 females, 20 males; 2 left
handed, 25 right handed; age 28±3.4 years). The se-
cond dataset includes data acquisitions of 40 intact
subjects (12 females, 28 males; 6 left handed, 34
right handed; age 29.9±3.9 years). The third data-
set includes data acquisitions of 11 transradial ampu-
tees (11 males; 1 left handed, 10 right handed; age
42.36±11.96 years). More details about the database
and the acquisition procedure can be found in (Atzori
et al., 2016), and (Atzori et al., 2014). Table 3 and
Table 4 summarize the information about the Ninapro
database.
PhyCS 2018 - 5th International Conference on Physiological Computing Systems
110

All the evaluations of the model were carried out
on the Ninapro DB-1 using all the data available. This
dataset is comprised of sEMG signals captured from
27 subjects using 10 electrodes, of which 8 are pla-
ced around the forearm and the other two are placed
on the main activity spots of the large flexor and ex-
tensor muscles of the forearm (Atzori et al., 2014).
To allow for a comparison with current literature, the
data were split into train and test datasets following
the approach described in (Atzori et al., 2016), i.e. re-
petitions 2,5, and 7 were used for testing and the rest
for training. Hyperparameter tuning was performed
using cross-validation on the training set. The model
was evaluated by means of two experiments. The first
one used the evaluation procedure described in (At-
zori et al., 2016), while the second used the setting
of (Geng et al., 2016). The assessment of the results,
reported in Table 5, consists of the average accuracies
on the train and test sets, the average of the top-3 test
accuracies (i.e. the accuracy when any of the model
3 highest output probabilities match the expected ge-
sture) and the test accuracy after majority voting on
each gesture repetition (i.e. the repetition segment of
a specific gesture is assigned the majority gesture la-
bel of the EMG images that correspond to that repeti-
tion). Additionally, the model performance is further
evaluated by analyzing misclassifications per class,
provided by the confusion matrix, and the accuracy
over the gesture duration normalized time as in (At-
zori et al., 2015).
In accordance with (Atzori et al., 2016), a model
was trained using 7 repetitions and tested with the re-
maining 3 for each of the 27 subjects in the dataset.
Each model is initialized with randomized weights
and trained using stochastic gradient descent (SGD)
for 100 epochs with 0.05 initial learning rate and a ba-
tch size of 512. The learning rate was reduced every
15th epoch by a factor of 50%.
The second experiment follows the setting of
(Geng et al., 2016), which differs from the procedure
of (Atzori et al., 2016) in that a pre-trained network is
created using all the training data of all subjects and
then a fine-tuned model is generated for each subject.
The first model is initialized with randomized weights
and trained using SGD for 100 epochs with 0.05 lear-
ning rate, and a batch size of 512. The learning rate
was reduced every 15 epochs by a factor of 50%. The
subject-specific models were initialized with the pre-
trained network and the last two convolutional layers
were fine-tuned using SGD optimizer for 30 epochs
with a learning rate of 0.01 halved every 10th epoch,
and a batch size of 128.
5 RESULTS AND DISCUSSION
For the problem of hand gesture recognition based
on EMG, a DL approach is presented in this pa-
per, which utilizes convolutional layers and learning
methods that have been successfully applied to ot-
her domains. Compared to similar works evaluated
on the same dataset, the proposed model outperforms
the original network of (Atzori et al., 2016), while it
is inferior to the more complex approaches of (Geng
et al., 2016) and (Wei et al., 2017). Table 6 shows
the comparison between these works under the same
evaluation that was used in each paper. The model
of (Geng et al., 2016) uses as input the instantane-
ous EMG images, i.e. 1×10 for the Ninapro DB-1, so
the majority vote over 200ms is shown in parentheses,
whereas the input image in the network of (Wei et al.,
2017) is 20×10 pixels.
Apart from differences in the input, there are more
model architecture dissimilarities. Both (Geng et al.,
2016) and (Wei et al., 2017) incorporate batch nor-
malization (Sergey and Szegedy, 2015) that allows
for faster convergence, and fully connected layers that
offer increased network capacity due to more traina-
ble weights. In addition, the approach of (Wei et al.,
2017) adopts a multi-stream pipeline where a number
of EMG electrodes are processed separately and are
then merged with fully connected layers. This split-
and-merge approach enables learning the correlation
between individual muscles and specific gestures lea-
ding to state-of-the-art accuracy of 85% on the Nina-
pro DB-1. However, we do not follow similar appro-
aches in this paper in order to better understand how
DL methods can be applied to sEMG data through a
simpler network.
The proposed network is further evaluated through
the loss graphs and an error analysis. Fig. 2 shows
the loss graphs during training on the train and test
sets, with coloring that corresponds to different sub-
jects. It can be seen that decaying the learning rate
helps the network parameters converge to a better op-
timum. When comparing the loss between the train
and test sets, it is obvious that there is some degree
of overfitting. However, applying more regularization
(e.g. dropout, weight decay) does not decrease the
test loss. Therefore, a different pipeline (e.g. prepro-
cessing steps, data augmentation, different filter sizes)
may reduce the generalization error of the network.
An error analysis was performed to better under-
stand the performance of our model. The confusion
matrix is calculated for each subject evaluation and
in Fig. 3 the average is shown. Most misclassifica-
tions occur around the main diagonal and according
to the class labels (Table 4) similar movements are
Deep Learning in EMG-based Gesture Recognition
111
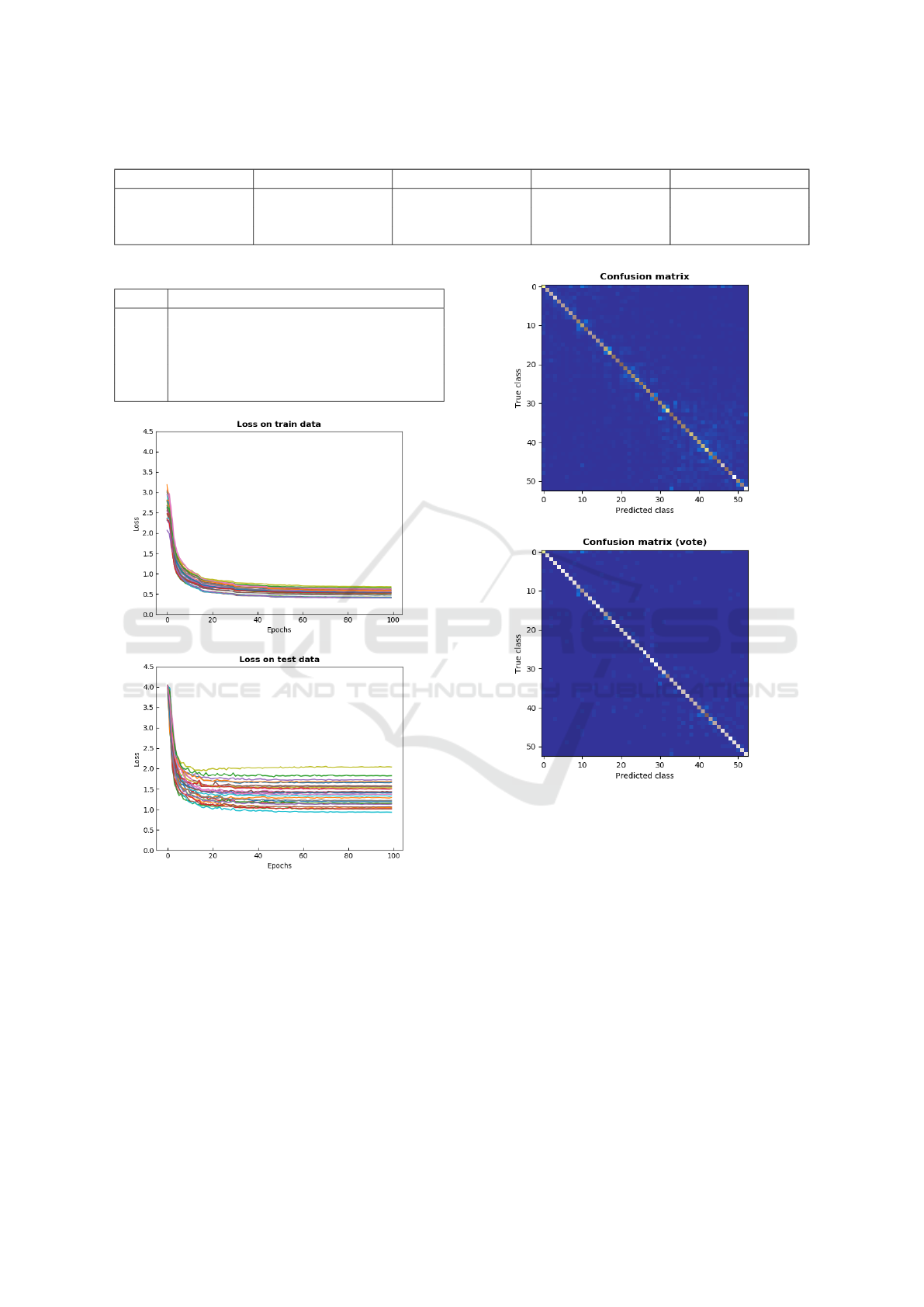
Table 3: The Ninapro dataset.
Dataset Subjects Movements Electrodes Sampling (Hz)
Dataset 1 (DB-1) 27 53 10 100
Dataset 2 (DB-2) 40 53 12 2000
Dataset 3 (DB-3) 11 53 12 2000
Table 4: Gestures label/number as in (Atzori et al., 2014).
Label Gesture
0 Rest
1-12 Individual finger extension/flexion
13-20 Isometric/isotonic configurations
20-29 Wrist movements
30-52 Grasps and functional movements
Figure 2: Loss value after each training epoch calculated
on train set (up) and test set (down). Colors correspond to
different subjects.
falsely categorized. That is expected considering the
location of the EMG electrodes and the muscles that
participate in each movement. For example, gesture
labels ‘9’, ‘11’ represent the adduction and flexion of
the thumb that are coordinated by the same forearm
muscles. In addition, there is a concentration of errors
in the low-right corner that corresponds to grasps and
functional hand gestures that involve more muscles.
Taking into account that each EMG image is a 150ms
segment and the gesture repetition lasts 5s, we may
Figure 3: Confusion matrices based on the per image pre-
dictions (up) and majority voting predictions (down).
conclude that for a given misclassification a propor-
tion of the images will be similar between the two ge-
stures. A possible explanation is that some groups of
movements can be broken down into the same smal-
ler movements. It is only when the full sequence of
images is available that the network can decide which
gesture is performed. Comparing the confusion ma-
trices before and after the majority voting we see that
most errors around the diagonal are reduced.
Another reason for the low accuracy is the fact
that the errors are not evenly distributed on the du-
ration of the entire gesture repetition. Fig. 4, which
relates classification errors with the time-normalized
movement duration, demonstrates that misclassificati-
ons are primarily concentrated in the beginning and at
the completion of the movement. The reason for that
PhyCS 2018 - 5th International Conference on Physiological Computing Systems
112
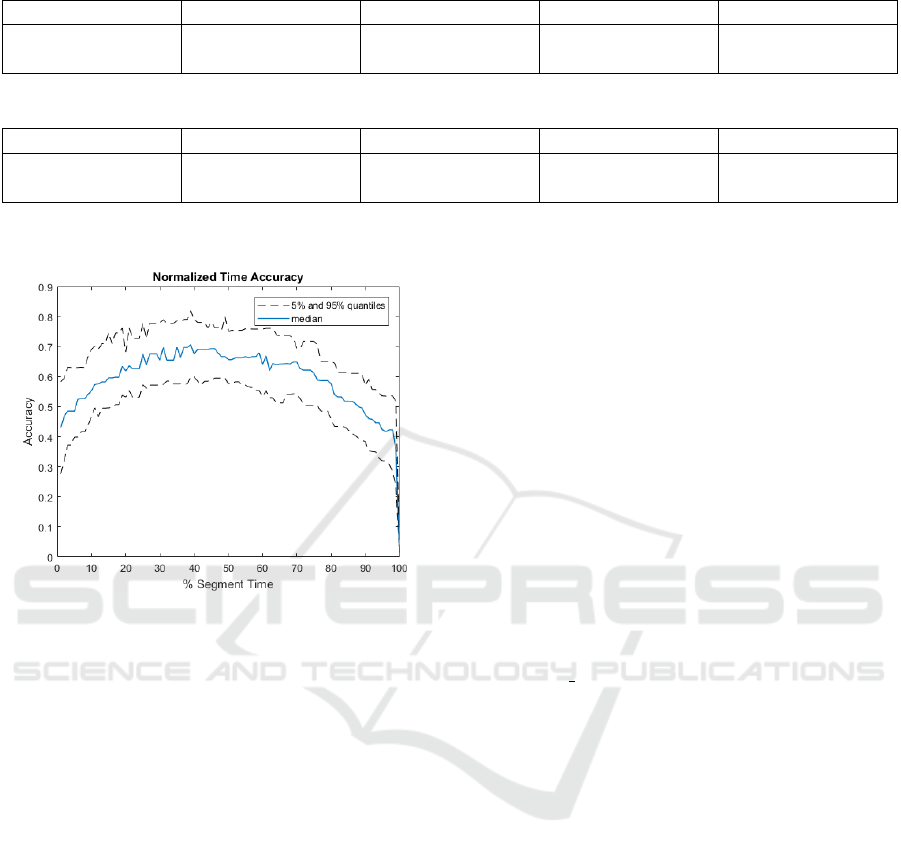
Table 5: Experimental results.
Setting Train accuracy Test accuracy Top-3 accuracy Vote accuracy
(Atzori et al., 2016) 83.03% 70.48% 87.06% 92.31%
(Geng et al., 2016) 81.21% 72.06% 88.06% 93.06%
Table 6: Comparison with other works.
Setting This work (Atzori et al., 2016) (Geng et al., 2016) (Wei et al., 2017)
(Atzori et al., 2016) 70.48% 66.59% - -
(Geng et al., 2016) 72.06% - 76.10% (77.80%) 85%
Figure 4: Plot of prediction accuracy against normalized
time duration. It can be seen that at the start and completion
of the gesture repetition the accuracy is lower.
is that during the recording session there is a gradual
transition between rest, gesture and rest, in contrast
to the discrete changes of the gesture labels. Con-
sequently, accuracy is lower during these transition
periods where the change in movement is not yet cle-
arly evident from the input EMG signal (Atzori et al.,
2015).
Overall, it is shown that a simple CNN architec-
ture can be successful at the task of sEMG hand ge-
sture recognition taking into account the chance le-
vel when classifying 53 gestures. Small modificati-
ons to the model parameters and the training process
can boost the performance, whereas deeper and more
complex networks yield the best performance. The
inability of the proposed model to generalize well to
unseen data needs to be addressed to facilitate furt-
her improvement. Finally, the use of small EMG
segments accounts for much of the classification er-
ror assuming that a great amount of overlap happens
between the EMG signals of gesture groups especi-
ally during their transitive periods. Therefore, majo-
rity voting over these small EMG segments provides
a better evaluation metric.
6 CONCLUSIONS
This paper presented an overview of recent advances
in the use of DL methods for EMG hand gesture clas-
sification, while improvements to existing architectu-
res were discussed. The proposed model follows the
work of (Atzori et al., 2016) and is compared to the
state of the art. It improves on the basic model by 3%,
yet the works of (Geng et al., 2016) and (Wei et al.,
2017) outperform it under the same evaluation set-
tings. As future work, we plan to investigate the utili-
zation of time-frequency representations (e.g. Wave-
let and Fourier transforms) as a preprocessing step, as
well as more complex architectures based on RNNs
to benefit from the temporal information in the data.
The implementation code is available at the
following link https://github.com/DSIP-UPatras/
PhyCS2018 paper.
ACKNOWLEDGEMENTS
This work was supported by the VUB-UPatras Inter-
national Joint Research Group (IJRG) on ICT.
REFERENCES
Atzori, M., Cognolato, M., and M
¨
uller, H. (2016). Deep Le-
arning with Convolutional Neural Networks applied to
electromyography data: A resource for the classifica-
tion of movements for prosthetic hands. Frontiers in
Neurorobotics, 10.
Atzori, M., Gijsberts, A., Castellini, C., Caputo, B., Hager,
A., Elsig, S., Giatsidis, G., Bassetto, F., and M
¨
uller,
H. (2014). Electromyography data for non-invasive
naturally-controlled robotic hand prostheses. Scienti-
fic Data, 1(140053).
Atzori, M., Gijsberts, A., Kuzborskij, I., Elsig, S., Hager,
A., Deriaz, O., Castellini, C., M
¨
uller, H., and Caputo,
B. (2015). Characterization of a benchmark database
Deep Learning in EMG-based Gesture Recognition
113

for myoelectric movement classification. IEEE Tran-
sactions on Neural Systems and Rehabilitation Engi-
neering, 23(1):73–83.
Castellini, C., Fiorilla, A., and Sandini, G. (2009). Multi-
subject/daily-life activity EMG-based control of me-
chanical hands. Journal of neuroengineering and re-
habilitation, 6:41.
Cheok, M., Omar, Z., and Jaward, M. (2017). A review
of hand gesture and sign language recognition techni-
ques. International Journal of Machine Learning and
Cybernetics.
C
ˆ
ot
´
e-Allard, U. et al. (2018). Deep Learning for elec-
tromyographic hand gesture signal classification by
leveraging transfer learning. ArXiv e-prints.
Du, Y., Jin, W., Wei, W., Hu, Y., and Geng, W. (2017).
Surface EMG-based inter-session gesture recogni-
tion enhanced by deep domain adaptation. Sensors,
17(3):458.
Englehart, K. and Hudgins, B. (2003). A robust, real-time
control scheme for multifunction myoelectric cont-
rol. IEEE Transactions on Biomedical Engineering,
50(7):848–854.
Englehart, K., Hudgins, B., Parker, P., and Stevenson, M.
(1999). Classification of the myoelectric signal using
time-frequency based representations. Medical Engi-
neering and Physics, 21(6):431–438.
Geng, W., Du, Y., Jin, W., Wei, W., Hu, Y., and Li, J.
(2016). Gesture recognition by instantaneous surface
EMG images. Scientific Reports, 6(36571).
Gijsberts, A., Atzori, M., Castellini, C., M
¨
uller, H., and
Caputo, B. (2014). Movement error rate for evalua-
tion of Machine Learning methods for sEMG-based
hand movement classification. IEEE Transactions
on Neural Systems and Rehabilitation Engineering,
22(4):735–744.
Glorot, X. and Bengio, Y. (2010). Understanding the diffi-
culty of training deep feedforward Neural Networks.
In Proceedings of the 13th International Conference
on Artificial Intelligence and Statistics (AISTATS),
Sardinia, Italy.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. MIT Press, Cambridge, MA.
Hudgins, B., Parker, P., and Scott, R. (1993). A new strategy
for multifunction myoelectric control. IEEE Tran-
sactions on Biomedical Engineering, 40(1):82–94.
Kuzborskij, I., Gijsberts, A., and Caputo, B. (2012). On the
challenge of classifying 52 hand movements from sur-
face electromyography. In 2012 Annual International
Conference of the IEEE Engineering in Medicine and
Biology Society, pages 4931–4937. IEEE.
Li, Y., Wang, N., Shi, J., Liu, J., and Hou, X. (2016). Revi-
siting Batch Normalization for practical domain adap-
tation. ArXiv e-prints.
Park, K. and Lee, S. (2016). Movement intention decoding
based on Deep Learning for multiuser myoelectric in-
terfaces. In 2016 4th International Winter Conference
on Brain-Computer Interface (BCI), pages 1–2. IEEE.
Scheme, E. and Englehart, K. (2011). Electromyogram
pattern recognition for control of powered upper-limb
prostheses: State of the art and challenges for clini-
cal use. The Journal of Rehabilitation Research and
Development, 48(6):643–659.
Sergey, I. and Szegedy, C. (2015). Batch Normalization:
Accelerating Deep Network training by reducing in-
ternal covariate shift. ArXiv e-prints.
Shim, H., An, H., Lee, S., Lee, E., Min, H., and Lee, S.
(2016). EMG pattern classification by split and merge
deep belief network. Symmetry, 8(12):148.
Shim, H. and Lee, S. (2015). Multi-channel electromyo-
graphy pattern classification using deep belief net-
works for enhanced user experience. Journal of Cen-
tral South University, 22(5):1801–1808.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: A simple way
to prevent Neural Networks from overfitting. Journal
of Machine Learning Research, 15:1929–1958.
Wei, W., Wong, Y., Du, Y., Hu, Y., Kankanhalli, M., and
Geng, W. (2017). A multi-stream Convolutional Neu-
ral Network for sEMG-based gesture recognition in
muscle-computer interface. Pattern Recognition Let-
ters.
Zhai, X., Jelfs, B., Chan, R., and Tin, C. (2017). Self-
recalibrating surface EMG pattern recognition for
neuroprosthesis control based on Convolutional Neu-
ral Network. Frontiers in Neuroscience, 11:379–390.
PhyCS 2018 - 5th International Conference on Physiological Computing Systems
114
