
Monte Carlo based Risk Analysis of Unmanned Aerial Vehicle Flights
over Construction Job Sites
Hashem Izadi Moud, Alireza Shojaei, Ian Flood and Xun Zhang
M. E. Rinker, Sr. School of Construction Management, University of Florida, Gainesville, Florida, U.S.A.
Keywords: Unmanned Aerial Vehicle, UAV, Monte Carlo Simulation, Risk Assessment, UAV Flights Risk.
Abstract: While Unmanned Aerial Vehicles (UAVs) have been used on construction job sites for different purposes
for over a decade, the risks and hazards of flying UAVs on construction job sites has not been either
quantitatively or qualitatively assessed. Quantifying the risks of flying UAVs over general populations is a
common practice in the general UAV industry. This study uses an established model that has been used to
quantify the risks of flying UAVs over general population, propagates the bases of the model based on the
construction industry needs, tailors some of the input of the model based on the construction industry
specifications, and uses the Monte-Carlo Simulation method to quantify the risks of flying UAVs over a real
construction job site adopted as a case study. This model is based on mishap rate for UAVs, population
density of the area that UAVs fly over and the lethal area of UAVs that could be potentially fatal in the
event of a crash. While this paper presents the very first effort in quantifying the risks of flying UAVs over
construction sites, there is a need in the construction industry to tailor this model based on the needs of the
industry to make the model more accurate.
1 INTRODUCTION
Unmanned Aerial Vehicles (UAVs), also known as
drones, were first introduced to construction job
sites around ten years ago. Over the past 10 years,
the use of UAVs for construction applications has
grown exponentially (Ham et al., 2016; Liu et al.,
2014; Michael Zucchi, n.d.), largely due to ready
access to low-cost, reliable and easy to fly UAVs
that are equipped with a variety of sensors, including
high-resolution cameras. UAVs have been used in
construction projects for various purposes, including
progress monitoring (Han et al., 2015; Lin et al.,
2015), site monitoring (Wen and Kang, 2014),
building and structural inspection and health
management (Eschmann et al., 2012; Kerle et al.,
2014; Kruijff et al., 2012; Michael et al., 2012;
Morgenthal and Hallermann, 2014; Pratt et al., 2008;
Roca et al., 2013; Wefelscheid et al., 2011), 3D
modeling and surveying job sites (Siebert and
Teizer, 2014), infrastructure asset management
(Ellenberg et al., 2016; Eschmann et al., 2013; Metni
and Hamel, 2007; Rathinam et al., 2008;
Sankarasrinivasan et al., 2015; Zhang and Elaksher,
2012), urban monitoring (Qin, 2014), material
tracking (Hubbard et al., 2015), sustainable energy
production site management (Murphy et al., 2011)
and construction safety (Irizarry et al., 2012). While
UAVs are being used on a daily basis for
construction processes and activities, the risks and
safety concerns associated with flying UAVs have
yet to be investigated.
The direct risk of flying UAVs would be falling
UAVs due to mechanical failure during flight, and
debris from collisions with an object present within
the job site flight zone (Clothier and Walker, 2006;
Opfer and PE, 2014). However, flying UAVs could
potentially cause indirect hazards, such as:
threatening workers’ personal space (Duncan
and Murphy, 2013);
distracting workers due to the noise and
motion of UAVs in flight (Christiansen et al.,
2016; Liew and Yairi, 2013; Sinibaldi and
Marino, 2013); and
threatening the privacy of workers through the
perceived surveillance by UAV cameras
(Clarke, 2014; Finn and Wright, 2012).
While there are numerous risk and safety
concerns associated with UAV flights over
construction job sites, there has never been a
coherent method to quantify the risks of UAV flights
over construction job sites. The construction
Moud, H., Shojaei, A., Flood, I. and Zhang, X.
Monte Carlo based Risk Analysis of Unmanned Aerial Vehicle Flights over Construction Job Sites.
DOI: 10.5220/0006868804510458
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 451-458
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
451

industry struggles with high rates of fatalities and
injuries. In 2015, a total of 4,836 fatal work
incidents were reported in the United States (US). Of
these, nearly 20% (937) were attributed to
construction, more than any other industry. The top
three causes of these fatal work incidents were: (i)
falls, slips and trips (364), (ii) transportation
incidents (226), and (iii) contact with objects and
equipment (159) (BLS, 2017). The high number of
items of equipment involved in fatal incidents in
construction highlights a need to tighten equipment-
related safety regulations. Equipment such as
loaders, graders, and bulldozers, have been widely
used in construction for many decades and is highly
regulated in order to protect personnel against
equipment-involved incidents. However, the
construction industry struggles with regulating the
safety of newly-introduced equipment, such as
UAVs. Being the industry with the highest fatality
rate in the US creates an even more urgent need for a
tightening of safety measures in the use of new
technologies on construction sites. This research
paper presents a model for quantifying the risks of
UAV flights over construction job sites. It further
applies the presented model to a real case study, an
under-construction building within the University of
Florida campus. The rest of this paper is organized
as follows. Section 2 describes the formula used to
quantify risks associated with UAV flights. Section
3 describes the current regulations of UAV flights in
the united states. Section 4 discusses the Monte-
Carlo simulation as a risk assessment scheme.
Section 5 goes into the detail of the case study used
in this research and discusses the assumptions used
to run the simulation. The discussion of the results,
conclusions, and acknoledgement close the article.
2 QUANTIFYING RISKS
ASSOCIATED WITH UAV
FLIGHTS
Quantifying risks associated with UAV flights over
construction job sites provides decision makers, such
as construction project managers and/or super-
intendents, with reliable metrics for assessing
whether or not it is safe to fly the UAV over a given
area on a construction job site. Also, it offers the
basis for health and safety governmental agencies
and insurance companies to decide on the legal
aspects of potential cases of fatality and injuries
which involve UAVs.
This paper describes a ground fatality expecta-
tion model based on the Clothier and Walker
(Clothier and Walker, 2006) approach. It is worth
noting that this model only quantifies the expected
ground fatalities due to a falling UAV(s) and/or
falling debris. This model does not provide any
perspective towards quantifying risks due to indirect
UAV risk hazards, such as threatening workers’
personal space, distracting workers due to noise and
motion and/or threatening the privacy of workers.
According to Clothier and Walker (Clothier and
Walker, 2006) the ground fatality expectation model
is formalized as:
SO = MR * φ * A
L
(1)
where:
SO refers to the safety objective in terms of
the number of fatalities per flight hours;
φ is the population density of the area under
the flight path of the UAV;
A
L
refers to the lethal area, which is
determined by the circular area of the maximum
length of UAV diameter plus a (safety) buffer; and
MR refers to the mishap rate and is calculated
according to Eq. (2).
MR = SFR + MC
Debris
+ Other (2)
where:
SFR represents the system failure rate per flight
hour;
MC
Debris
refers to the debris from a possible
midair collision per flight hour; and
other refers to the other hazards that might result
in fatality risks.
According to Clothier and Walker (Clothier and
Walker, 2006), the expected fatality rate in the
general aviation industry is usually limited to 1*10
-06
or one fatality in every one million flight hours. But
the question is how this general aviation industry
fatality rate affects the UAV flights safety objective in
the construction industry. Due to a lack of data for
calculating UAV flight safety objectives, it is assum-
ed that the fatality rate in UAV flights should be set to
the fatality rate of the general aviation industry.
3 CURRENT REGULATIONS OF
UAV FLIGHTS IN THE UNITED
STATES
The proposed model by Clothier and Walker
(Clothier and Walker, 2006) would be useful to
quantify the risk of UAV flights only when it is
combined with the current rules and regulations
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
452

regarding UAV flights. In the US, the Federal
Aviation Industry (FAA) has the sole power to
regulate all aspects of civil aviation. According to
the FAA, Unmanned Aerial Systems (UASs) (a
broader category for UAVs) flights are divided into
two broader categories: (1) fly for hobby purposes,
and (2) fly for business purposes. FAA UAS Flight
regulations are as follows:
(A) Fly under the Special Rule for Model
Aircraft (Section 336)
Only fly for entertainment or hobby.
The model aircraft must be registered.
Follow community-based safety guidelines
and fly within the programming of a national
community-based organization.
The maximum weight of the aircraft is 55 lbs.,
unless certified by a community-based
organization.
Flying range cannot exceed visual line-of-
sight.
Do not fly near other aircraft.
The airport and air traffic control tower must
be notified in advance if a model aircraft is
flying within 5 miles of an airport.
Never fly near emergency response efforts
(B) Fly under the FAA’s small UAS Rule (Part
107)
Fly for entertainment or business use only.
The drone must be registered.
The drone must get a remote pilot certificate
issued by the FAA.
The maximum weight of drone is 55 lbs.
Flight speed cannot exceed 100 mph.
Flying range cannot exceed visual line-of-
sight.
Do not fly near other aircraft or over people.
Do not fly in controlled airspace near airports
until you get the permission from FAA.
Fly only during daylight or civil twilight.
Flying height cannot exceed 400 feet.
Do not fly from a moving vehicle, unless in a
sparsely populated area.
In general, for simplifying the most crucial
aspects of these regulations, this paper considers the
following assumptions: (1) the construction site used
in this paper as the case study is not located within
the 5-mile radius of or near any airport, (2) it is
assumed that all regulations regarding the piloting of
the UAV are being followed, (3) UAV flights are
happening within the line-of-sight of the pilot, (4)
UAV specifications follow FAA regulations, and
more importantly (5) the space over people’s heads
is a no-fly zone.
4 MONTE-CARLO SIMULATION
AS A RISK ASSESSMENT
SCHEME
This paper uses the Monte-Carlo simulation
technique for sampling and analysis of the problem.
Monte-Carlo has been widely applied to problems
within the construction domain due to the high
levels of uncertainty in the execution of construction
projects and the large investments that are therefore
at risk (Akintoye and MacLeod, 1997).
The safety issue in the construction industry and
the uncertainties involved make a case for using
Monte Carlo simulation as a means of gaining more
insight into construction health and safety
management. Monte Carlo simulation has been used
to model potential occupational safety and health
risk in construction by incorporating hazards related
to each activity while considering the stochastic
nature of the problem (Sousa et al., 2015). Also, it
has been used to analyze the dynamic relationship
between the factors leading to an accident and the
compensation paid for those accidents (Li et al.,
2017). Shohet et al. (Shohet et al., 2018) used this
simulation method to find the relationship between
the total cost of safety and the degree of investment
in preventive safety in order to find the amount of
optimal investment. Real-time location-based
simulation is another application area where Monte
Carlo simulation is used to simulate the safety
hazards on construction sites. Li et al. (Li et al.,
2016) used historical data to predict the safety
hazard level on an individual level through time and
based on location.
The sensitivity of small UAVs to wind, their high
maneuverability and potential for mechanical
failures, along with their potential for operating
errors make them a safety threat in general but a
more significant one on construction job sites due to
uncertain operation conditions. A recent analysis by
Plioutsias et al., (Plioutsias et al., 2018) shows a
significant gap between the extent to which current
commercial UAVs meet safety requirements. Monte
Carlo simulation is a suitable means for simulating
the conflict between one or multiple UAVs
operating in construction sites and the surrounding
environment. The method is helpful in taking into
Monte Carlo based Risk Analysis of Unmanned Aerial Vehicle Flights over Construction Job Sites
453

account not only the uncertainties regarding the
movements of objects but also situational issues
such as wind (Alejo et al., 2016). There is extensive
literature on the application of Monte Carlo
simulation in collision avoidance of UAVs, both
between themselves and possibly with other objects
(Cook and Brooks, 2015; Douthwaite et al., 2017;
Mcfadyen et al., 2016).
5 ANALYSIS
In this section, risks of UAV flights over a real
construction job site has been quantified using the
Clothier and Walker (Clothier and Walker, 2006)
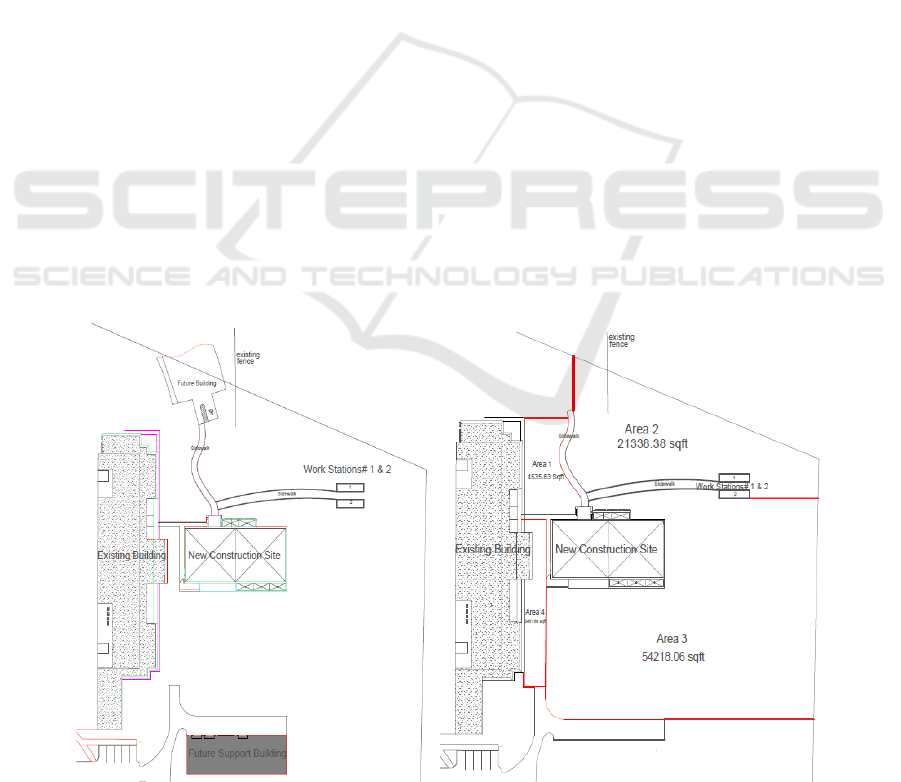
model. Figure 1 represents a schematic design of a
construction project that has been used as a case
study in this paper. Before analyzing risks of UAV
flights over any construction site, it is important to
find the available fly-zones by excluding the no-fly
zones, such as pedestrian pathways, workstations
and any other place that is populated with
construction personnel. The following points
describe the construction site outline presented in
Figure 1 (left).
The construction site is labeled as “New
Construction Site”.
This construction site is surrounded by an
existing building, two workstations for on-site
construction workers, borders of the site and a
few pathways where construction workers
usually travel between sites and workstations.
The layout of two future buildings are also
shown in the layout.
In order to simplify this map, the two future
buildings are deleted in the layout on the right side
of Figure.1. Also, applying the FAA rules and
regulations regarding no-fly zone over humans leads
to the development of four standalone zones that
UAVs are allowed to operate without violating this
regulation. Figure. 1 shows how this simple pre-
flight mapping is drawn considering basic FAA rules
and regulations for UAV operations.
Four separate zones are identified as safe fly-
zones for UAV operations with the following areas:
1. Area 1: 4535.84 sq.ft. (421.39 sq.m.)
2. Area 2: 21338.38 sq.ft. (1982.40 sq.m.)
3. Area 3: 54218.06 sq.ft. (5037.02 sq.m.)
4. Area 4: 3461.66 sq.ft. (321.60 sq.m.)
While there could be different outlines of the
safe-fly zones, this paper considered the presented
zones for the following reasons:
Area 1: is restricted between building (on the
south and west sides), workers’ pathways (on
the east side) and also one border of the
construction site (on the north side).
Area 2: is restricted between workers’
pathway (on the south and west sides), borders
of the construction site (on the north,
northwest and east sides).
Area 3: is restricted between workers’
pathway (on the north side), the practicality of
flight (on the west side) and also the border of
the construction site (on the south side).
Area 4: while Area 4 and Area 3 could
potentially be merged, it was decided to have
a standalone area, as Area 4, due to the
impracticality of flight in the narrow area,
which is now named as Area 4.
Recalling Equation 1, Mishap Rate (MR), the
Lethal Area (A
L
) and also the density of population
(φ) in the area are required. For A
L,
a reasonable
range of lethal area of common UAVs is considered.
This range corresponds to the area of a UAV that
could be lethal in a potential crash. It is usually
estimated to be the longest side or dimension of a
UAV. It varies based on the radius, or diameter, of
the UAV. Most UAVs that fly over construction job
sites are commercially available and their diameter
is estimated to vary from 0.5 m for mini UAVs to
1.5 m for more advanced UAVs. This range will be
used in the Monte-Carlo simulation as an evenly
distributed range between 0.5 and 1.5 m.
The density (φ) is the tricky part. The density
corresponds to the number of people that are present
on the job site (here we consider them to be only
construction personnel without any outsider visitor)
divided by the area. In this paper, a possible
distribution of construction personnel, presented
below, is divided by the area of Area 1 through Area
4, in each simulation. The authors do not have any
data on the actual number of construction personnel
working on job site of this project. Thus, it is just
assumed that the existing number of construction
personnel present on each of the defined areas is
between 3 to 11, in a normal distribution (Average =
7, Standard Deviation (SD) = 1.33). The density then
is calculated for Area 1, Area 2, Area 3 and Area 4.
Finding or estimating the MR of UAVs is not an
easy task. Unlike the general aviation industry,
where abundant information about the MR is
available, there is almost no data available regarding
the exact MR of UAVs. In this analysis, therefore,
the UAV lifetime is assumed to be normally
distributed, with a range between 100.00 and
9,900.00, a mean of 5,000.00, and standard deviation
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
454
of 1,633.33. In other words, the MR would be one
crash in this assumed lifetime of a UAV.
A series of Monte-Carlo Simulations for each
have been run using the Palisade @Risk 7.5 pack-
age. The SO is calculated for each area 1 million
times. The results are discussed in the next section.
6 RESULTS, DISCUSSION &
CONCLUSION
A series of Monte-Carlo simulations have been run
to estimate the SO of each area. In order to give an
overview of the inputs of the simulation, all inputs
are summarized in the following:
Lethal Area of UAV: An even distribution
with the minimum diameter of 0.5 m and
maximum of 1.5 m.
Population Density (φ): Estimated number of
construction personnel between 3 to 11 with a
normal distribution.
UAV MR is assumed to be normally
distributed, with a range between 100.00 and
9,900.00, a mean of 5,000.00, and standard
deviation of 1,633.33. It needs to be
emphasized that there is no data on the MR.
This data for MR is just a wide, and very
conservative, assumption. It is assumed that
operation lifetime of UAVs that are being
used in the construction industry is between
100.00 and 9,900.00 hours of operation,
which is distributed normally. It means that
the MR would be one incident in this above-
mentioned lifetime.
For each area, a simulation has been run using
Palisade @Risk 7.5 with 1,000,000 iterations. The
results are as follow.
Results of UAV Flights Simulation over Area 1:
The Population Density (φ) simulation resulted
in a normal distribution with mean of 0.016612 and
a standard deviation of 0.003156.
The results of the Monte Carlo simulation for SO
of area 1 is presented in Figure 2.
Results of UAV Flights Simulation over Area 2:
The Population Density (φ) simulation resulted
in a normal distribution with mean of 0.0035311 and
the standard deviation of 0.0006709. The results of
Monte Carlo simulation for SO of area 2 is presented
in Figure 3.
Results of UAV Flights Simulation over Area 3:
The Population Density (φ) simulation resulted
in a normal distribution with mean of 0.001,389,7
and the standard deviation of 0.000,264,0. The
results of the Monte Carlo simulation for SO of area
3 is presented in Figure 4.
Results of UAV Flights Simulation over Area 4:
The Population Density (φ) simulation resulted
in a normal distribution with mean of 0.021766 and
the standard deviation of 0.004,136. The results of
the Monte Carlo simulation for SO of area 4 is
presented in Figure 5.
Figure 1: The layout of the site (left), and the designated UAV flight areas during construction (right).
Monte Carlo based Risk Analysis of Unmanned Aerial Vehicle Flights over Construction Job Sites
455
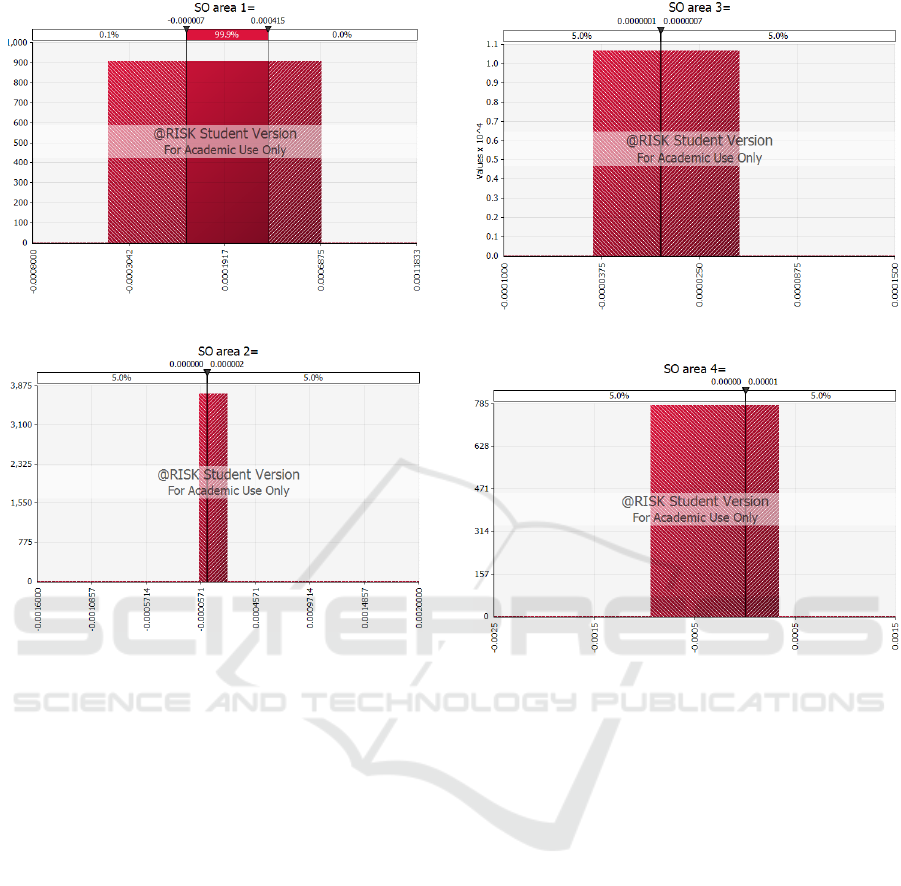
Figure 2: Monte Carlo result of SO simulation area 1.
Figure 3: Monte Carlo result of SO simulation area 2.
For each area Monte Carlo simulation results are
presented. The SO results correspond to the number
of fatalities in flight hours. SO is usually presented
in number of fatalities per million flight hours.
The SO Results are summarized as following:
Area 1:
o Mean: 3.306E-006
o Mode: 1.011E-006
o Median:
2.602E-006
o Standard deviation:
Area 2:
o Mean: 7.067E-007
o Mode: 1.839E-007
o Median:
5.534E-007
o Standard deviation: 1.545E-005
Area 3:
o Mean: 2.785E-007
o Mode: 7.544E-008
o Median: 2.178E-007
o Standard deviation: 5.914E-006
Area 4:
o Mean: 2.785E-007
o Mode: 7.544E-008
o Median: 2.178E-007
o Standard deviation: 5.914E-006
Figure 4: Monte Carlo result of SO simulation area 3.
Figure 5: Monte Carlo result of SO simulation area 4.
Based on Clothier and Walker (2006), 1x10
-06
is
considered as a threshold. Comparing the results of
SO simulation for each area it can be concluded that
Area 1 is not safe while Areas 2, 3, and 4 are safe.
This analysis would help the site managers to
understand the risks related to flying UAVs over
their site and plan proactively to avoid any UAV
related incident in their construction site. In this
case, the site supervisors would know that flying
UAVs over area 1 needs more caution or should be
avoided if possible. The research presented in this
paper provides the grounding for a quantitative
approach towards assessing the risk of flying UAVs
over construction sites. The study is limited to a case
study but shows how by using a Monte-Carlo
simulation, high risk areas could be identified so
further mitigation strategies can be adopted. Another
limitation of this study is the lack of empirical data
regarding some of the underlying assumptions which
is rooted in the lack of public data about the mishap
rate of UAVs. This study could be used as a
foundation for developing more accurate evaluations
of UAV flights over construction sites. The next
steps in this research would be increasing the
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
456

accuracy of the risk evaluation by using empirical
data, simulating the risk in a spatial manner, and
finally developing a real time risk analysis of UAVs
flight based on the real-time situation of construction
sites.
ACKNOWLEDGEMENTS
The authors sincerely thank the University of Florida
Office of Planning, Design and Construction for
their generosity in providing needed information for
this research.
REFERENCES
Akintoye, A.S., MacLeod, M.J., 1997. Risk analysis and
management in construction. Int. J. Proj. Manag. 15,
31–38. https://doi.org/10.1016/S0263-7863(96)00035-
X
Alejo, D., Cobano, J. A., Heredia, G., Ollero, A., 2016. An
Efficient Method for Multi-UAV Conflict Detection
and Resolution Under Uncertainties, in: Reis, L.P.,
Moreira, A.P., Lima, P.U., Montano, L., Muñoz-
Martinez, V. (Eds.), Advances in Intelligent Systems
and Computing, Advances in Intelligent Systems and
Computing. Springer International Publishing, Cham,
pp. 635–647. https://doi.org/10.1007/978-3-319-2714
6-0_49.
BLS, (2017). “Bureau of Labor Statistics: Census of Fatal
Occupational Injuries (CFOI) - Current and Revised
Data”. Available from: <https://www.bls.gov/iif/osh
cfoi1.htm#2015> (November 1st, 2017).
Christiansen, F., Rojano-Doñate, L., Madsen, P. T.,
Bejder, L., 2016. Noise levels of multi-rotor
unmanned aerial vehicles with implications for
potential underwater impacts on marine mammals.
Front. Mar. Sci. 3, 277.
Clarke, R., 2014. Understanding the drone epidemic.
Comput. Law Secur. Rev. 30, 230–246.
Clothier, R. A., Walker, R. A., 2006. Determination and
evaluation of UAV safety objectives.
Cook, S. P., Brooks, D., 2015. A Quantitative Metric to
Enable Unmanned Aircraft Systems to Remain Well
Clear. Air Traffic Control Q. 23, 137–156.
https://doi.org/10.2514/atcq.23.2-3.137
Douthwaite, J. A., De Freitas, A., Mihaylova, L. S., 2017.
An interval approach to multiple unmanned aerial
vehicle collision avoidance, in: 2017 Sensor Data
Fusion: Trends, Solutions, Applications (SDF). IEEE,
pp. 1–8. https://doi.org/10.1109/SDF.2017.8126384
Duncan, B. A., Murphy, R. R., 2013. Comfortable approach
distance with small unmanned aerial vehicles, in: RO-
MAN, 2013 IEEE. IEEE, pp. 786–792.
Ellenberg, A., Kontsos, A., Moon, F., Bartoli, I., 2016.
Bridge related damage quantification using unmanned
aerial vehicle imagery. Struct. Control Heal. Monit.
23, 1168–1179. https://doi.org/10.1002/stc.1831
Eschmann, C., Kuo, C.-M., Kuo, C.-H., Boller, C., 2013.
High-resolution multisensor infrastructure inspection
with unmanned aircraft systems. ISPRS-International
Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 125–
129.
Eschmann, C., Kuo, C.-M., Kuo, C.-H., Boller, C., 2012.
Unmanned aircraft systems for remote building
inspection and monitoring, in: Proceedings of the 6th
European Workshop on Structural Health Monitoring,
Dresden, Germany.
Finn, R. L., Wright, D., 2012. Unmanned aircraft systems:
Surveillance, ethics and privacy in civil applications.
Comput. Law Secur. Rev. 28, 184–194.
Ham, Y., Han, K. K., Lin, J. J., Golparvar-Fard, M., 2016.
Visual monitoring of civil infrastructure systems via
camera-equipped Unmanned Aerial Vehicles (UAVs):
a review of related works. Vis. Eng. 4, 1.
Han, K., Lin, J., Golparvar-Fard, M., 2015. A formalism
for utilization of autonomous vision-based systems
and integrated project models for construction
progress monitoring, in: Proceedings of 2015
Conference on Autonomous and Robotic Construction
of Infrastructure. pp. 118–131.
Hubbard, B., Wang, H., Leasure, M., Ropp, T., Lofton, T.,
Hubbard, S., Lin, S., 2015. Feasibility study of UAV
use for RFID material tracking on construction sites,
in: Proc. 51st ASC Annu. Int. Conf.
Irizarry, J., Gheisari, M., Walker, B.N., 2012. Usability
assessment of drone technology as safety inspection
tools. J. Inf. Technol. Constr. 17, 194–212.
Kerle, N., Fernandez Galarreta, J., Gerke, M., 2014. Urban
structural damage assessment with oblique UAV
imagery, object-based image analysis and semantic
reasoning, in: Proc., 35th Asian Conference on
Remote Sensing.
Kruijff, G.-J. M., Pirri, F., Gianni, M., Papadakis, P.,
Pizzoli, M., Sinha, A., Tretyakov, V., Linder, T.,
Pianese, E., Corrao, S., 2012. Rescue robots at
earthquake-hit Mirandola, Italy: A field report, in:
Safety, Security, and Rescue Robotics (SSRR), 2012
IEEE International Symposium on. IEEE, pp. 1–8.
Li, H., Yang, X., Wang, F., Rose, T., Chan, G., Dong, S.,
2016. Stochastic state sequence model to predict
construction site safety states through Real-Time
Location Systems. Saf. Sci. 84, 78–87.
Li, R. Y. M., Chau, K. W., Ho, D. C. W., 2017. Dynamic
Panel Analysis of Construction Accidents in Hong
Kong. Asian J. Law Econ. 8, 1–9. https://doi.org/10.
1515/ajle-2016-0022
Liew, C. F., Yairi, T., 2013. Quadrotor or blimp? Noise
and appearance considerations in designing social
aerial robot, in: Human-Robot Interaction (HRI), 2013
8th ACM/IEEE International Conference on. IEEE,
pp. 183–184.
Lin, J. J., Han, K. K., Golparvar-Fard, M., 2015. A
framework for model-driven acquisition and analytics
of visual data using UAVs for automated construction
progress monitoring, in: Computing in Civil
Monte Carlo based Risk Analysis of Unmanned Aerial Vehicle Flights over Construction Job Sites
457

Engineering 2015. pp. 156–164.
Liu, P., Chen, A.Y., Huang, Y.-N., Han, J.-Y., Lai, J.-S.,
Kang, S.-C., Wu, T.-H., Wen, M.-C., Tsai, M.-H.,
2014. A review of rotorcraft unmanned aerial vehicle
(UAV) developments and applications in civil
engineering. Smart Struct. Syst. 13, 1065–1094.
Mcfadyen, A., Martin, T., Mejias, L., 2016. Simulation
and modelling tools for quantitative safety
assessments of unmanned aircraft systems and
operations, in: 2016 IEEE Aerospace Conference.
IEEE, pp. 1–12. https://doi.org/10.1109/AERO.2016.
7500558
Metni, N., Hamel, T., 2007. A UAV for bridge inspection:
Visual servoing control law with orientation limits.
Autom. Constr. 17, 3–10. https://doi.org/10.1016/
j.autcon.2006.12.010
Metropolis, N., Ulam, S., 1949. The Monte Carlo Method.
J. Am. Stat. Assoc. 44, 335–341. https://doi.org/10.
1080/01621459.1949.10483310
Michael, N., Shen, S., Mohta, K., Mulgaonkar, Y., Kumar,
V., Nagatani, K., Okada, Y., Kiribayashi, S., Otake,
K., Yoshida, K., 2012. Collaborative mapping of an
earthquakedamaged building via ground and aerial
robots. J. F. Robot. 29, 832–841.
Michael Zucchi, n.d. Drones: A Gateway Technology to
Full Site Automation | 2015-06-10 | ENR [WWW
Document]. URL https://www.enr.com/articles/9040-
drones-a-gateway-technology-to-full-site-automation?
v=preview (accessed 3.30.18).
Morgenthal, G., Hallermann, N., 2014. Quality
Assessment of Unmanned Aerial Vehicle (UAV)
Based Visual Inspection of Structures. Adv. Struct.
Eng. 17, 289–302. https://doi.org/10.1260/1369-
4332.17.3.289
Murphy, R. R., Dreger, K. L., Newsome, S., Rodocker, J.,
Steimle, E., Kimura, T., Makabe, K., Matsuno, F.,
Tadokoro, S., Kon, K., 2011. Use of remotely operated
marine vehicles at Minamisanriku and Rikuzentakata
Japan for disaster recovery. 9th IEEE Int. Symp.
Safety, Secur. Rescue Robot. SSRR 2011 19–25.
https://doi.org/10.1109/SSRR.2011.6106798
Opfer, N.D., PE, D.R.S., 2014. Unmanned aerial vehicle
applications and issues for construction, in: 121st
ASEE Annual Conference and Exposition.
Plioutsias, A., Karanikas, N., Chatzimihailidou, M. M.,
2018. Hazard Analysis and Safety Requirements for
Small Drone Operations: To What Extent Do Popular
Drones Embed Safety? Risk Anal. 38, 562–584.
https://doi.org/10.1111/risa.12867
Pratt, K. S., Murphy, R.R., Burke, J. L., Craighead, J.,
Griffin, C., Stover, S., 2008. Use of tethered small
unmanned aerial system at Berkman Plaza II collapse,
in: Safety, Security and Rescue Robotics, 2008. SSRR
2008. IEEE International Workshop on. IEEE, pp.
134–139.
Qin, R., 2014. An object-based hierarchical method for
change detection using unmanned aerial vehicle
images. Remote Sens. 6, 7911–7932.
Rathinam, S., Kim, Z.W., Sengupta, R., 2008. Vision-based
monitoring of locally linear structures using an
unmanned aerial vehicle. J. Infrastruct. Syst. 14, 52–63.
Roca, D., Lagüela, S., Díaz-Vilariño, L., Armesto, J.,
Arias, P., 2013. Low-cost aerial unit for outdoor
inspection of building façades. Autom. Constr. 36,
128–135.
Sankarasrinivasan, S., Balasubramanian, E., Karthik, K.,
Chandrasekar, U., Gupta, R., 2015. Health Monitoring
of Civil Structures with Integrated UAV and Image
Processing System. Procedia Comput. Sci. 54, 508–
515. https://doi.org/10.1016/j.procs.2015.06.058
Shohet, I.M., Luzi, M., Tarshish, M., 2018. Optimal
allocation of resources in construction safety:
analytical-empirical model. Saf. Sci. 104, 231–238.
https://doi.org/10.1016/j.ssci.2018.01.005
Siebert, S., Teizer, J., 2014. Mobile 3D mapping for
surveying earthwork projects using an Unmanned
Aerial Vehicle (UAV) system. Autom. Constr. 41,
1–14.
Sinibaldi, G., Marino, L., 2013. Experimental analysis on
the noise of propellers for small UAV. Appl. Acoust.
74, 79–88.
Sousa, V., Almeida, N. M., Dias, L. A., 2015. Risk-based
management of occupational safety and health in the
construction industry – Part 2: Quantitative model.
Saf. Sci. 74, 184–194. https://doi.org/10.1016/j.ssci.
2015.01.003
Wefelscheid, C., Hänsch, R., Hellwich, O., 2011. Three-
dimensional building reconstruction using images
obtained by unmanned aerial vehicles. Int. Arch.
Photogramm. Remote Sens. Spat. Inf. Sci. 38.
Wen, M.-C., Kang, S.-C., 2014. Augmented reality and
unmanned aerial vehicle assist in construction
management, in: Computing in Civil and Building
Engineering (2014). pp. 1570–1577.
Zhang, C., Elaksher, A., 2012. An Unmanned Aerial
Vehicle-Based Imaging System for 3D Measurement
of Unpaved Road Surface Distresses. Comput. Civ.
Infrastruct. Eng. 27, 118–129.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
458
