
Path Tracking of a Bi-steerable Mobile Robot:
An Adaptive Off-road Multi-control Law Strategy
Roland Lenain
1
, Ange Nizard
2
, Mathieu Deremetz
1
, Benoit Thuilot
2
, Vianney Papot
1
and Christophe Cariou
1
1
Irstea, Technologies and Information Support System Research Unit,
9 avenue Blaise Pascal, CS 20085, 63178 Aubi
`
ere, France
2
Universit
´
e Clermont Auvergne, CNRS, SIGMA Clermont, Institut Pascal,
F-63000 Clermont-Ferrand, France
Keywords:
Adaptive Control, Four-wheel-steering Mobile Robot, Path Following, Agriculture, Off-road.
Abstract:
This paper proposes a path tracking control algorithm dedicated to off-road mobile robots equipped with two
steering axles. Four wheel steering mobile robot allows to enhanced motion capability with respect to classical
car-like mobile robot, while reducing the friction induced by the skid-steered architecture. In particular, such a
kinematic structure makes it possible to independently control the robot heading and its position, or to increase
turning capabilities. In this paper, a strategy is developed in order to reduce the space required when achieving
manoeuvres around a desired trajectory. Contrarily to classical point of view, expressing a relationship between
the front and rear wheels, the control laws here proposed aim at following the same path for the front and the
rear centre of the axle. The robot is then split into two subsystems, regulating two lateral deviations with
respect to a desired trajectory.
1 INTRODUCTION
The potentialities of mobile robotics in various field
of application are more and more considered, since
they meet social needs in terms of comfort, safety, and
reliability. In particular, transportation and industrial
mobile robots are the subject of a growing interest
with several commercial autonomous devices (Lefvre
et al., 2015). The social demand is particularly preg-
nant in off-road application (such as environment and
agriculture (Blackmore, 2014)), where hazardous sit-
uations may be encountered, or where human drivers
may be exposed to dangerous products. Neverthe-
less, the motion has to be accurately controlled, even
when the robot is submitted to perturbations with re-
spect to classical assumptions achieved in literature
(such as the rolling without sliding or ideal actua-
tors). Moreover, the robots have to move in crowded
environments with restricted areas to achieve ma-
noeuvres. Basically, manually driven vehicles are
equipped with additional degrees of freedom to in-
crease their agility. Regarding mobile robotics, the
raise of unmanned adaptable robots equipped with
four independent steering wheels (also called 4WS
robots) having a huge range of movement such as the
Thorvald platform (Grimstad et al., 2015) or the agri-
cultural robot proposed in (Haibo et al., 2015), allows
to imagine that new kinds of movement during path
tracking can be achieved, such as the reduction of
the radius of curvature when moving in a warehouse
where a lot of goods are stored or in agricultural field
for reducing headlands.
The control of 4WS robots is often made by im-
posing a rear steering angle as a function of front
steering angle, as proposed in (Wang and Qi, 2001)
and in (Peng et al., 2004). If this improves the turn-
ing capability of the robot (Ackermann, 1994), this
does not necessarily minimizes the space required for
manoeuvres. Some other works take advantages of
having two steering angles to control independently
the position and the heading of a mobile robot with
respect to the trajectory (Cariou et al., 2009) or in the
global frame (Deremetz et al., 2017a) or to control
each axle for tracking a ”dual-path” (Nizard et al.,
2016) . These attractive features permit to preserve
for instance the orientation with respect to a slope, or
to compensate for the drift when moving fast. If the
position and the orientation of the robot, around a de-
sired trajectory, have to be controlled to optimize ma-
noeuvres, we propose in this paper a new approach to
Lenain, R., Nizard, A., Deremetz, M., Thuilot, B., Papot, V. and Cariou, C.
Path Tracking of a Bi-steerable Mobile Robot: An Adaptive Off-road Multi-control Law Strategy.
DOI: 10.5220/0006865801630170
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 163-170
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
163

control the front axle and the rear axle, independently,
to ensure their passages by the same path.
These works are achieved in the framework of
path tracking task (Raksincharoensak et al., 2001).
Basically, a path is preliminary defined and a refer-
ence point on the robot has to follow this trajectory
(which is usually chosen as the middle of the rear
axle for a car like mobile robot, for interesting prop-
erties see (Campion et al., 1996)). When only the
front steering angle is actuated, the middle of the front
axle is necessarily outside of the turn. In this paper,
robot is viewed as two subsystems (front and rear),
with a control laws independently servoing the rear
and the front position. This permits to ensure that
two control points of the robots (the middle of two
front wheels and the middle of two rear wheels) will
follow accurately the same trajectory. The control is
based on the assumption that the kinematic descrip-
tion of robot motion may be split into two models.
One describes the motion of rear axle, and the other is
dedicated to the front of the robot. These two models
are only linked by the rear steering variables, which
can be viewed as measured parameters for the front
semi-model. This point of view relies on an extended
kinematic model, allowing to account for non per-
fect conditions thanks to models-based adaptive al-
gorithm (Anderson and Bevly, 2005). This approach
then permits to derive independently two control laws
for front and rear steering angles. As a result, two
points on the robot are tracking the same trajectory.
The paper is organized as follows. First, the mod-
elling of the robot is proposed, based on an extended
kinematic approach, recalled in the paper. The on-
line estimation of variables required is then briefly
detailed in a second section, using observation tech-
niques. This observer permits to know all the vari-
ables introduced in the model. As a result, the model
may be used to build two independent control laws,
which are derived in a third section. The perfor-
mances of the proposed approach are then tested by
performing full scale experiments on an off-road mo-
bile robot. They permits to highlight the efficiency of
the proposed algorithm.
2 MODELING OF THE ROBOT
2.1 Assumptions and Notations
This paper considers a two-wheel steering mobile
robot. As is commonly perceived in the framework
of path tracking (see (Morin and Samson, 2000)), the
robot is considered as symmetric along its heading,
and its four wheels are supposed to be in contact with
the ground. As a result, the robot may be viewed as a
bicycle with an equivalent front steering angle δ
F
, an
equivalent rear steering angle δ
R
and a wheelbase L.
This point of view is depicted in Fig. 1.
Figure 1: Extended kinematic model of the robot with re-
spect to the reference trajectory Γ.
This robot of class {1,2}, according to the classi-
fication proposed by (Campion et al., 1996), is con-
trolled thanks to its rear velocity v
R
, dependent on the
wheel rotations, and the two steering angles : δ
F
for
the front axle, and δ
R
for the rear one. Classically, the
motion model is build under the rolling without slid-
ing assumption, imposing that the direction of each
speed vector is parallel to the tires. In off-road con-
texts, such an assumption is not valid, due to slip-
pages. As a result, the orientation of speed vectors
are different from the tire orientations (Canudas-de
Wit et al., 2001). An angle appears for each virtual
wheel (front and rear), which is named sideslip angle
and are denoted in this paper by β
F
for the front wheel
and β
R
for the rear one. These two angles are hardly
measurable directly and are assumed to be estimated
indirectly by the observer described in Sec. 3.
Assuming that sideslip angles are known, the front
and rear steering angles are considered to be the con-
trol variables of the system, since the velocity v
R
is
considered as a measured parameter, potentially vary-
ing. Thanks to this control variables, the objective of a
path tracking control law is to impose the convergence
of the robot w.r.t. the desired path Γ (see Fig. 1). The
tracking error y
R
is basically defined as the minimal
distance between the middle of the rear axle R to Γ.
˜
θ is the angular deviation, denoting the difference be-
tween the robot’s heading θ and the orientation of the
trajectory at the closest point of R belonging to Γ. At
this point, one can define the curvilinear abscissa s on
the path to be followed.
In this paper, we consider a second lateral devia-
tion with respect to the middle of the front axle (point
F). The distance between F and Γ is called the front
lateral deviation and is denoted by y
F
. In this paper,
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
164

we consider that the wheelbase L (distance between F
and R) is small with respect to the curvature of the ref-
erence path at point M (denoted by c(s)). As a result,
the path to be followed may locally be approximated
by a circle whose radius is
1
c(s)
and whose centre is
O. In this paper, we consider a second lateral devia-
tion w.r.t. the middle of the front axle (point F), de-
noted y
F
. We consider that the intersection between
the straight line parallel to (MR) passing through the
point F, and the reference path Γ, is denoted N.
2.2 Global Motion Equations
As has been detailed in detailed in (Yi et al., 2009)
for the extended model depicted in Fig. 1, the motion
equation for the classical path tracking problem may
be expressed as:
˙
s = v
R
cos(
˜
θ
2
)
1 − c(s)y
R
,
˙
y
R
= v
R
sin(
˜
θ
2
),
˙
˜
θ = v
R
[cos(δ
R
+ β
R
)λ
1
− λ
2
],
(1)
with:
λ
1
=
tan(δ
F
+ β
F
) − tan(δ
R
+ β
R
)
L
,
λ
2
=
c(s) cos(
˜
θ + δ
R
+ β
R
)
1 − c(s)y
R
,
˜
θ
2
=
˜
θ + δ
R
+ β
R
.
(2)
This model is suitable for the path tracking ap-
proach since it can be turned into a linear form as
has been shown in (Morin and Samson, 2000), since
the extension to sideslip angles preserve the kinemat-
ical structure of mobile robots. As has been achieved
in (Lenain et al., 2010), this model permits to derive
a control law enabling the convergence of the rear lat-
eral deviation y
R
to zero. In particular, this is possible
whatever the value of the rear steering angle δ
R
, pro-
vided that its time derivative
˙
δ
R
can be neglected with
respect to the settling time of the control law imposed
on the front steering angle δ
F
. In the previous cited
reference, the rear steering angle is then used to con-
trol an angular deviation. If this permits to control
the heading of a robot independently from its lateral
position, it does not ensure explicitly the control of
the front axle position. As this paper aims at ensuring
the convergence of the position of the front and the
rear axle (point R and F) to the reference path Γ, an
additional model has to be introduced.
2.3 Modeling of the Two Subsystems
In order to ensure that both points of the robot chassis
F and R follow the same trajectory Γ, two models for
the derivative of tracking errors y
F
and y
R
are devel-
oped from the representation depicted in Fig. 1. The
dynamic of the rear lateral deviation y
R
is obtained
directly from the classical set of equation (2), i.e:
˙
y
R
= v
R
sin(
˜
θ
2
).
(3)
Regarding the front axle, let us consider the geo-
metric properties in order to derive an expression of
y
F
with respect to y
R
. From Fig. 1, one can define the
relation (4),
y
F
= y
R
+ L sin(
˜
θ) + e .
(4)
In this equation, only the deviation e remains un-
known. Assuming that, at each step, the trajectory is
locally (at any curvilinear abscissa s) viewed as a cir-
cle of radius
1
c(s)
, e can be expressed as:
e =
1 − cos(γ)
c(s)
,
(5)
where γ, depicted in Fig. 1 is the angle defined by the
points [M O N]. This angle may be easily obtained
using the radius of curvature of the reference trajec-
tory, the angular deviation
˜
θ and the robot wheelbase
L:
γ = arcsin(Lc(s) cos(
˜
θ)).
(6)
Thanks to this relation, the distance e is entirely
known and the lateral front deviation may be com-
puted thanks to the relation (2). The time derivative
may then be obtained, considering that e is slowly
varying with respect to the possible variation of y
F
thanks to actuator reactivity. It comes:
˙
y
F
=
˙
y
R
+ L
˙
˜
θ cos(
˜
θ).
(7)
Using the global model, one can define an explicit
expression for the evolution of front lateral deviation:
˙
y
F
= v
R
sin(
˜
θ
2
) + Lv
R
cos(
˜
θ)[cos(δ
R
+ β
R
)λ
1
− λ
2
] .
(8)
The definition of λ
1
and λ
2
given in the model (2)
are explicitly linked to the control variable δ
F
and δ
R
.
Thanks to equations (3) and (2.3), the relationships
between the control variables and the time derivatives
of the lateral deviations are available. This constitutes
the model which will be used in Sec. 4 to derive the
control laws, provided that the sideslip angles β
F
and
β
R
are known, which is the aim of the observer de-
scribed hereafter.
Path Tracking of a Bi-steerable Mobile Robot: An Adaptive Off-road Multi-control Law Strategy
165

3 OBSERVATION OF SIDESLIP
ANGLES
In order to derive control laws for the convergence of
the lateral errors to zero, the knowledge of sideslip
angles is mandatory. There is no perception systems
allowing to measure directly such variables. Never-
theless, we assume that sensors on-boarded on the
robot permit to measure the position, the orientation
and the velocity of the robot at a given point, here
R. As it has been shown in (Lenain et al., 2014) and
extended to higher dynamic phenomena in (Deremetz
et al., 2017b), an observer may be built in order to es-
timate the two sideslip angles thanks to such a percep-
tion system. The details of the computation are in the
previous references. In this paper, the same approach
is used and only a short presentation is hereafter pro-
posed.
3.1 Observer State
In order to achieve the indirect estimation of sideslip
angles, let us consider the state space model ξ com-
posed of the robot lateral position and relative orien-
tation. Its evolution may be written as (9), based on
the model (2).
˙
ξ =
˙
ξ
dev
˙
ξ
β
=
f (ξ
dev
, ξ
β
, v
R
, δ
F
, δ
R
)
0
2×1
,
(9)
where ξ is split into two sub-states:
• ξ
dev
= [y
˜
θ]
T
, which constitutes the deviations of
the robot with respect to the trajectory Γ,
• ξ
β
= [β
F
β
R
]
T
, which is composed of the sideslip
angles, to be estimated.
The function f (ξ
dev
, ξ
β
, v
R
, δ
F
, δ
R
) is constituted
of the two last lines of the system (2). Because no
equation is available for the evolution of
˙
β
F
and
˙
β
R
in a kinematic representation, it is set to 0
2×1
. If the
observer gains are chosen appropriately, this model-
ing assumption is admissible, as it has been shown
in (Lenain et al., 2014). The objective of the observer
is to ensure the convergence of the complete observed
state
ˆ
ξ to the actual ξ, measuring only the sub-state
ξ
dev
. As a result only the observation error related to
the deviation
˜
ξ
dev
=
ˆ
ξ
dev
− ξ
dev
is known.
3.2 Observer Equations
It has been shown in (Lenain et al., 2014) that the
observer defined by equation (10) permits the conver-
gence of the whole observed state
ˆ
ξ to the actual one
ξ.
˙
ˆ
ξ
dev
= f (ξ
dev
,
ˆ
ξ
β
, v
R
, δ
F
, δ
R
) + α
dev
(
˜
ξ
dev
),
˙
ˆ
ξ
β
= α
β
(
˜
ξ
dev
),
(10)
where α
dev
and α
β
are two functions of the obser-
vation error attached to the deviation part of the state
ξ, and defined as follows:
(
α
dev
(
˜
ξ
dev
) = K
dev
˜
ξ
dev
,
α
β
(
˜
ξ
dev
) = K
β
h
∂ f
∂ξ
β
(ξ
dev
,
ˆ
ξ
β
, v
R
, δ
F
, δ
R
)
i
T
˜
ξ
dev
,
(11)
with K
dev
a 2 × 2 positive diagonal matrix and K
β
a positive scalar. These gains permit to tune the set-
tling time of the observer. As it can be seen consider-
ing (11), only the measurable error
˜
ξ
dev
is mandatory
to compute the proposed observer. Thanks to this ap-
proach, the global model (2) may be entirely known.
As a consequence, expressions of front and rear lat-
eral deviation derivative (3) and (2.3) can be used to
compute control laws for the path tracking of points F
and R.
4 CONTROL LAWS
Thanks to the modeling proposed previously and the
observer defined in (Lenain et al., 2014) and briefly
presented in the previous section, a model linking lat-
eral deviations (front y
F
and rear y
R
) to the control
variables (steering angles and velocity) is available.
As a consequence, control laws on steering angles,
considering the velocity v
R
as a measured parameter
are here developed. This is achieved considering two
subsystems controlled by each steering angle.
4.1 Rear Steering Angle
Let us first consider the regulation of the rear con-
trol point R on the trajectory. The objective is to en-
sure the convergence of the rear lateral deviation y
R
to
zero. The evolution of y
R
is related to the rear steer-
ing angle by the model (3), thanks to the intermediate
variable
˜
θ
2
. The convergence y
R
→ 0 may be ensured
by imposing the following differential equation:
˙
y
R
= −K
R
y
R
,
(12)
with K
R
a positive scalar defining the settling time for
the exponential convergence of y
R
to zero imposed
by (12). By injecting in this condition the expression
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
166

of rear lateral error derivative (3), and using the defi-
nition of
˜
θ
2
, one can reformulate the previous condi-
tions as:
δ
R
= arcsin
−K
R
y
R
v
R
−
˜
θ −
ˆ
β
R
, (13)
provided that v
R
6= 0 and |
−K
R
y
R
v
R
|< 1. In practice,
in path tracking the velocity is always positive and
consequently non null, since the robot cannot be con-
trolled to its desired trajectory if it is stopped. Never-
theless, in order to permit stopping points to the robot,
one can define the gain K
R
as a function of velocity,
which has to be null when v
R
= 0. The second con-
ditions is linked to the existence range of the func-
tion arcsin. This impose that lateral error is small
enough with respect to the robot velocity and the gain:
| y
R
|<
| v
R
|
K
R
. In practice, according to the values usu-
ally reached by velocity and the choice for the control
gain, the lateral deviation has to exceed several meters
in order to come across a singularity. When properly
initialized, such a value may hardly be reached. Nev-
ertheless, a saturation on error, or a variable gain may
be computed in order to avoid such a singularity.
The expression (13) constitutes the control law on
the rear steering angle in order to ensure the differen-
tial equation (12) on lateral deviation y
R
, implying its
convergence to zero.
4.2 Front Steering Angle
Once the rear steering angle is computed thanks to
the control law (13), the objective is to derive a con-
trol law for front steering in order to ensures the con-
vergence of the front steering (denoted by the point
F in Fig. 1) axle to the desired trajectory Γ. In other
words, the objective is to ensure the convergence of
the front lateral deviation to zero y
F
→ 0. Thanks to
the extended kinematic model computation, the ex-
pression (2.3) is available for the time derivative of
y
F
, pending on sideslip angles and steering angles.
One possible condition on
˙
y
F
in order to permit the
convergence of y
F
to zero may be defined as follows.
˙
y
F
= −K
F
y
F
,
(14)
provided that K
F
is a positive scalar, the condi-
tion (14) will lead the front lateral error to exponen-
tially converge to zero. As rear steering angle δ
R
is
known, as well as sideslip angles (
ˆ
β
F
and
ˆ
β
R
are in-
deed on-line estimated thanks to the observer (10)),
one can introduce the explicit expression (2.3) for
˙
y
F
in the previous condition. Computation permits to ex-
tract the following expression for front steering angle.
δ
F
= arctan
(
Lλ
2
cos(δ
R
+
ˆ
β
R
)
−
K
F
y
F
v
R
cos(δ
R
+
ˆ
β
R
)cos(
˜
θ)
− B
1
)
−
ˆ
β
F
,
(15)
with B
1
=
sin(
˜
θ
2
)
cos(δ
R
+
ˆ
β
R
)cos
˜
θ
− tan(δ
R
+
ˆ
β
R
),
λ
1
and λ
2
that are already defined by the model (2), re-
placing sideslip angles by their corresponding obser-
vation values (i.e.
ˆ
β
{F,R}
instead of β
{F,R}
). This con-
trol law for front steering angle exists under the same
conditions than those defined for rear steering control
law. It has been designed using front and rear kine-
matic models defined in Sec. 2, under the assumption
that the derivative of the rear sideslip angle and the
derivative of the rear steering angle are defined as :
(
˙
β
F
,
˙
δ
R
) = (0, 0). Such an assumption is considered
to be reasonable since the tuning of gain K
F
and K
R
can be achieved on this way (i.e. K
F
> K
R
). This
setting permits to emphasize reactivity of front axle
with respect to the rear one in order to meet such an
assumption. As pointed out in experimental results,
it does not affect the performances of the proposed
algorithm.
5 EXPERIMENTAL RESULTS
5.1 Experimental Setup
The four wheel-driven robot depicted in Fig. 2 is
used in order to point out the result of the pro-
posed approach. It is a fully electric mobile robot
equipped with four independent motors controlling
wheels speed. Two additionnal motors regulate the
front and rear steering angles. As shown in Fig. 2,
the main on-boarded sensor is an RTK-GPS settled
on the vertical of the rear axle (above the point R de-
picted in Fig. 1). It supplies the position within an
accuracy of ±2cm, while the heading is computed
thanks to a Kalman filter, mixing the GPS heading
data and the robot odometry. Related to the definition
of a reference path, these data permits to feed both
the observer, and the control laws (13) and (4.2). In
order to show the efficiency of the proposed control
algorithm, the autonomous tracking of the path de-
picted in Fig. 3 is first realize by the robot using only
the front steering angle axle. The control in this case
is the approach proposed in previous works (Lenain
et al., 2014), based on the same observer, and using
predictive features.
Path Tracking of a Bi-steerable Mobile Robot: An Adaptive Off-road Multi-control Law Strategy
167
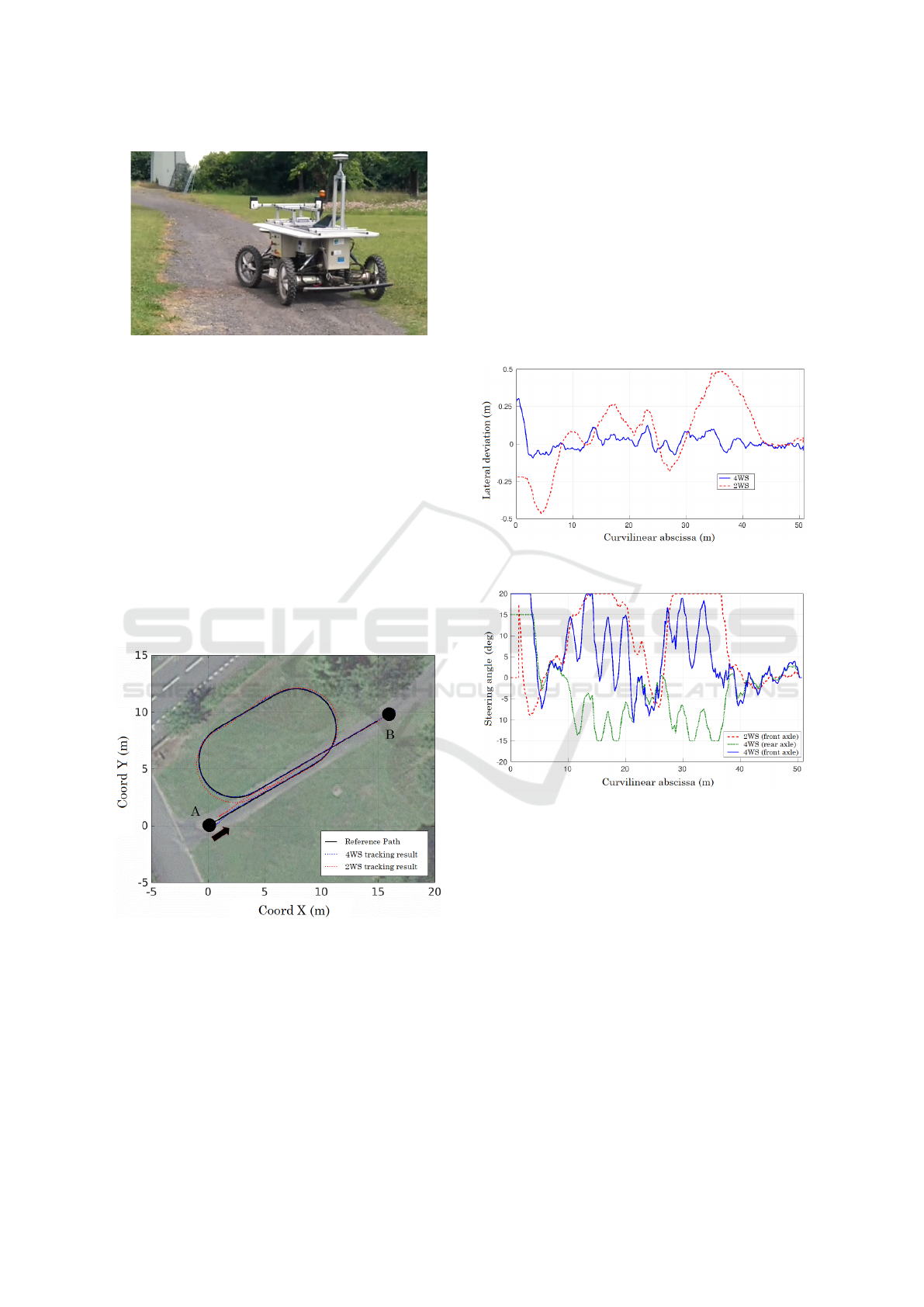
Figure 2: Experimental robot and on-boarded sensor.
In order to highlight the benefit of the proposed
four-wheel-steering control strategy, the reference tra-
jectory, depicted in black line in Fig. 3, has been pre-
viously recorded. This path, starting in A and ending
in B, is composed of straight line parts at the begin-
ning and the end, separated by two successive curves
with a radius of curvature equal to 3.4m and 3m re-
spectively. Such radii cannot be reached in practice
when controlling only the front steering wheels (lim-
ited to an angle of 20
◦
). As a result, the front steering
angle saturates and the robot cannot follow the trajec-
tory properly. This is pointed out by considering the
result of the path tracking depicted in red in Fig. 3,
achieved at 2m.s
−1
, with only the front steering acti-
vated.
Figure 3: Path to be followed and actually achieved trajec-
tories.
On the contrary, when using the front and rear
steering control strategy proposed in that paper, the
robot is able to track accurately the trajectory. The
successive positions recorded at 2m.s
−1
, when using
control laws (13) and (4.2) are indeed reported in blue
in Fig. 3, which are superimposed with the desired
trajectory.
5.2 Manoeuvrability Improvement in
Tracking Accuracy
The tracking accuracy obtained with and without us-
ing the control of the rear steering angle may be in-
vestigated in Fig. 4. The red dashed line depicts
the tracking error obtained when controlling only the
front steering axle. The large error obtained during
the curves (between curvilinear abscissa 15-25m and
30-42m) are due to the saturation of the front steering
axle, as reported in Fig. 5.
Figure 4: Comparison of tracking errors with and without
the use of rear steering angle.
Figure 5: Comparison of front steering angles, and rear
steering angle when used.
In this figure, the front steering angle obtained
when controlling the robot only with front steering
wheels is reported in dashed red line. It can be noticed
that the saturation value of 20
◦
is obtained almost all
the two bends. On the contrary, when using the front
and rear steering wheels, the front steering angle (de-
picted in blue plain line) is decreased thanks to the
rear steering angle (turning to the right), depicted in
green dotted line.
This permits to the robot to stay on the trajectory,
since the lateral deviation obtained when using the
proposed control strategy stay around zero, whatever
the curvature of the desired trajectory and the type
of ground (alternatively gravel and wet grass). This
tracking error is indeed depicted in blue plain line in
Fig. 4 and stays within ±10cm.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
168
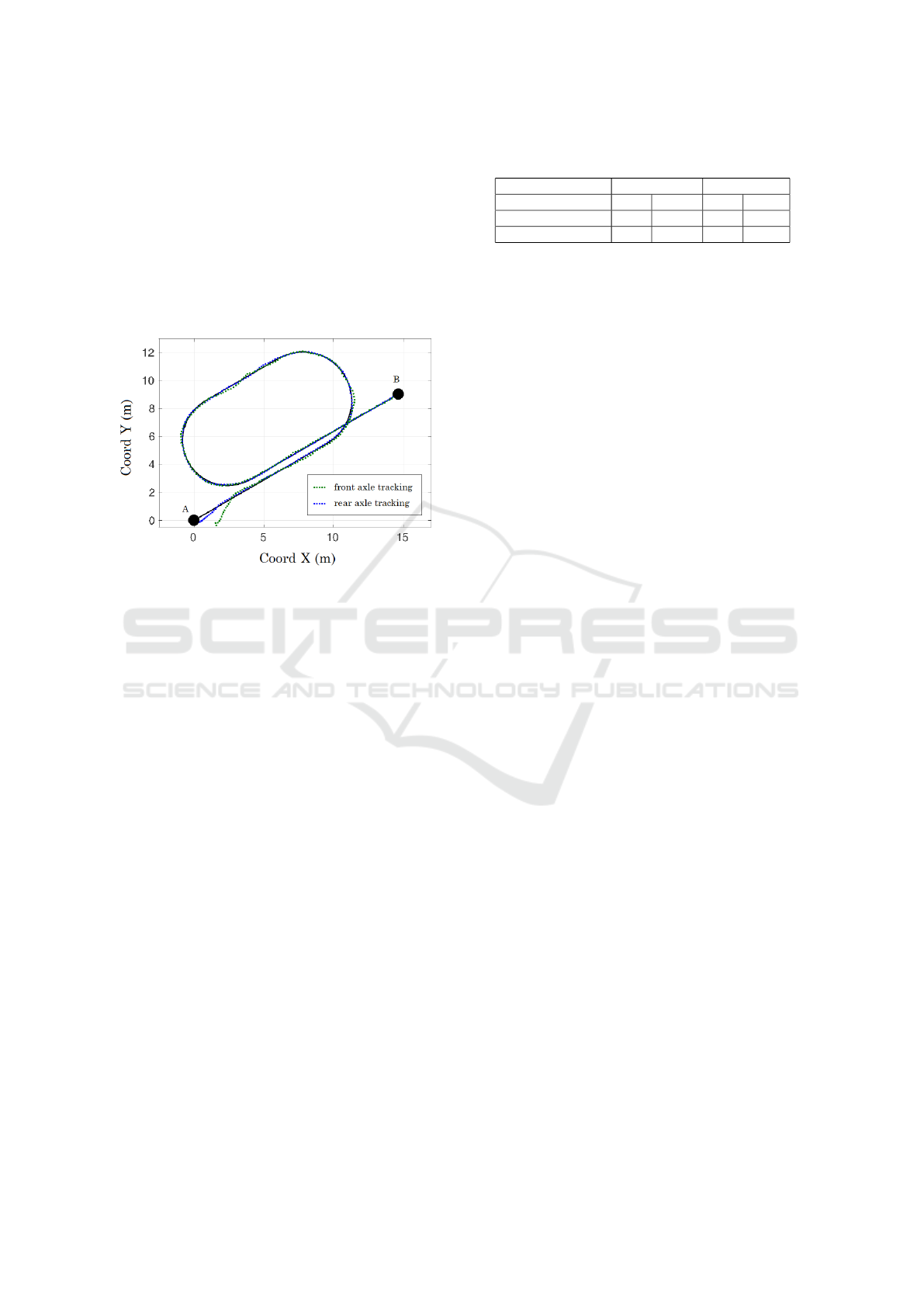
5.3 Trajectory of Each Axle
The second benefit of this approach lies in the reduc-
tion of the space occupied by the robot during ma-
noeuvers, since front and rear axle follow the same
trajectory during the bend. This can be verified in
Fig. 6, where the trajectory of the front axle (point F)
is depicted in green dotted line (in addition to the ref-
erence trajectory depicted in black and the position of
point R depicted in blue).
Figure 6: Path to be followed and actually achieved trajec-
tories.
One can see that each point of the robot (R and
F) follows accurately the trajectory instead of hav-
ing a deviation in the front axle when using a single
steering axle robot. This permits to reduce the nec-
essary space to achieve harsh manoeuvres by increas-
ing the turning capabilities. As it can be seen on the
videos attached to the paper, using such an algorithm,
the robot is able to reach the trajectory without hav-
ing an angular deviation. During initialization phases,
the front and rear steering angles indeed rotate in the
same direction to cancel the initial lateral deviation.
In order to point out the accuracy obtained dur-
ing the tracking the Tab. 1 shows the statistical data
related to the absolute values of lateral deviations ob-
tained during the tracking. The mean and standard
deviation of the absolute value of the error recorder
at points R (y
R
) and F (y
F
) are reported for the track-
ing results using the proposed approach and compared
to the data obtained using the front steering angle.
It can be noticed that when using the proposed ap-
proach, the mean and standard deviations are very
close to zero (a few centimetres accuracy), despite of
the harsh radius of curvature imposed by the path to
be followed. On the contrary, when using a single
steering axle (front), since saturations occurred, large
deviations may be recorded leading to a bad accuracy
(with a mean of more than 30cm, for the front steer-
ing point). This value is logicallly bigger than for the
rear control point R (22cm) since only the position of
Table 1: Comparison of absolute value of lateral deviation
recorded during the tracking.
2 steering angles 1 steering angle
| y
R
| | y
F
| | y
R
| | y
F
|
mean (m) 0.04 0.07 0.22 0.32
standard deviation (m) 0.03 0.05 0.19 0.27
point R is controlled when a single steering angle is
controlled.
When using the proposed control laws (13)
and (4.2), it can be noticed than the front lateral devi-
ation y
F
is a little bit less accurate than the rear one y
R
(7cm against 4cm). This is due to the small deviations
of the point F which can be noticed in Fig. 6. This
can be explained by the fact that the control law for
the front steering angle (4.2) does not account for the
variations of rear steering angle δ
R
. When fast vari-
ations of δ
R
occurs, a settling time is mandatory for
the front axle to compensate for these variations. As
a results, some punvtual overshoots can be recorder.
This may be tackled in future works by using predic-
tive control.
6 CONCLUSIONS
In this paper a new control algorithm dedicated to four
wheel-driven mobile robot is proposed. The front and
rear axle of the robot are considered as two indepen-
dent sub-systems regulating their own point on the
same desired trajectory. The physical link is ensured
by the computation of the front tracking error, which
is deduced from the rear position and the robot’s head-
ing. An adaptive approach is added from previous
work in order to face the potential influence of bad
grip conditions, since such works are devoted to off-
road application, such as in civil security or in agricul-
ture, for which high manoeuvrability is mandatory.
Experimental results have shown the efficiency of the
proposed approach at low speed (up to 2m.s
−1
), for
which the dynamical effects can be neglected. Fu-
ture works are focused on the increase of the robot
speed. A predictive layer, exploiting the knowledge
of the path to be followed is expected to be imple-
mented to compensate for inertial effects and the in-
fluence of low level delays. Moreover, control laws
proposed explicitly relies on the velocity and do not
exist when the robot stops. This impose to switch the
control laws to zero when the velocity is close to zero.
To overcome this drawback, a new version will be
proposed, based on a model using partial derivative
of error with respect to curvilinear abscissa, instead
of time derivatives.
Path Tracking of a Bi-steerable Mobile Robot: An Adaptive Off-road Multi-control Law Strategy
169

ACKNOWLEDGEMENTS
This work has been sponsored by the French govern-
ment research program ”Investissements d’Avenir”
through the IMobS3 Laboratory of Excellence (ANR-
10-LABX-16-01), by the European Union through
the program ”Regional competitiveness and employ-
ment 2007-2013” (ERDF Auvergne region), and by
the Auvergne region.
It received the support of French National Research
Agency under the grant number ANR-14-CE27-0004
attributed to Adap2E project (adap2e.irstea.fr) and
has also been sponsored through the RobotEx Equip-
ment of Excellence (ANR-10-EQPX-44). We thank
them for their financial support.
REFERENCES
Ackermann, J. (1994). Robust decoupling, ideal steering
dynamics and yaw stabilization of 4ws cars. Automat-
ica, 30(11):1761–1768.
Anderson, R. and Bevly, D. (2005). Estimation of tire cor-
nering stiffness using GPS to improve model based es-
timation of vehicle states. In IEEE Intelligent Vehicles
Conference, Las Vegas, U.S.A.
Blackmore, C. (2014). Learning to change farming and
water management practices in response to the chal-
lenges of climate change and sustainability. Outlook
on AGRICULTURE, 43(3):173–178.
Campion, G., Bastin, G., and Andr
´
ea-Novel, B. d. (1996).
Structural properties and classification of kinematic
and dynamic models of wheeled mobile robots. IEEE
Transactions on Robotics and Automation, 12(1):47–
62.
Canudas-de Wit, C., Tsiotras, P., Claeys, X., Yi, J., and
Horowitz, R. (2001). Friction tire/road modeling, esti-
mation and optimal braking control. In NACO2 Work-
shop, Lund, Sweden, volume 45.
Cariou, C., Lenain, R., Thuilot, B., and Berducat, M.
(2009). Automatic guidance of a four-wheel-steering
mobile robot for accurate field operations. Journal of
Field Robotics, 26(6-7):504–518.
Deremetz, M., Lenain, R., Couvent, A., Cariou, C., and
Thuilot, B. (2017a). Path tracking of a four-wheel
steering mobile robot: A robust off-road parallel steer-
ing strategy. In Mobile Robots (ECMR), 2017 Euro-
pean Conference on, pages 1–7. IEEE.
Deremetz, M., Lenain, R., Thuilot, B., and Rousseau, V.
(2017b). Adaptive trajectory control of off-road mo-
bile robots: A multi-model observer approach. In
Robotics and Automation (ICRA), 2017 IEEE Inter-
national Conference on, pages 4407–4413. IEEE.
Grimstad, L., Pham, C. D., Phan, H. T., and From, P. J.
(2015). On the design of a low-cost, light-weight,
and highly versatile agricultural robot. In Advanced
Robotics and its Social Impacts (ARSO), 2015 IEEE
International Workshop on, pages 1–6. IEEE.
Haibo, L., Shuliang, D., Zunmin, L., and Chuijie, Y. (2015).
Study and experiment on a wheat precision seeding
robot. Journal of Robotics, 2015:12.
Lefvre, S., Carvalho, A., and Borrelli, F. (2015). Au-
tonomous Car Following: A Learning-Based Ap-
proach. IEEE Intelligent Vehicles \ldots.
Lenain, R., Thuilot, B., Cariou, C., and Martinet, P. (2010).
Mixed kinematic and dynamic sideslip angle observer
for accurate control of fast off-road mobile robots.
Journal of Field Robotics, 27(2):181–196.
Lenain, R., Thuilot, B., Guillet, A., and Benet, B. (2014).
Accurate target tracking control for a mobile robot: a
robust adaptive approach for off-road motion. In IEEE
International Conference on Robotics and Automation
(ICRA).
Morin, P. and Samson, C. (2000). Practical stabilization
of a class of nonlinear systems. Application to chain
systems and mobile robots. In IEEE Conference on
Decision and Control (CDC), volume 3, pages 2989–
2994, Sydney (Australia).
Nizard, A., Thuilot, B., Lenain, R., and Mezouar, Y. (2016).
Nonlinear path tracking controller for bi-steerable ve-
hicles in cluttered environments. IFAC-PapersOnLine,
49(15):19–24.
Peng, S.-T. P. S.-T., Sheu, J.-J. S. J.-J., and Chang, C.-C.
C. C.-C. (2004). A control scheme for automatic path
tracking of vehicles subject to wheel slip constraint.
In Proceedings of the 2004 American Control Confer-
ence, volume 1, pages 804–809 vol.1.
Raksincharoensak, P., Nagai, M., and Mouri, H. (2001).
Investigation of automatic path tracking control us-
ing four-wheel steering vehicle. In IVEC2001. Pro-
ceedings of the IEEE International Vehicle Electron-
ics Conference 2001. IVEC 2001 (Cat. No.01EX522),
pages 73–77.
Wang, D. and Qi, F. (2001). Trajectory planning for a four-
wheel-steering vehicle. In Robotics and Automation,
2001. Proceedings 2001 ICRA. IEEE International
Conference on, volume 4, pages 3320–3325. IEEE.
Yi, J., Wang, H., Zhang, J., Song, D., Jayasuriya, S., and
Liu, J. (2009). Kinematic modeling and analysis of
skid-steered mobile robots with applications to low-
cost inertial-measurement-unit-based motion estima-
tion. IEEE Transactions on Robotics, 25(5):1087–
1097.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
170
