
A Brake-based Assistive Wheelchair Considering a Seat Inclination
Daisuke Chugo
1
, Ryo Kohara
1
, Masahiro Iwaki
1
, Satoshi Muramatsu
2
,
Sho Yokota
3
and Hiroshi Mashimoto
4
1
School of Science and Technology, Kwnsei Gakuin University, Sanda, Hyogo, Japan
2
School of Information Science and Technology, Tokai University, Hiratsuka, Kanagawa, Japan
3
Faculty of Science and Engineering, Toyo University, Kawagoe, Saitama, Japan
4
Advanced Institute of Industrial Technology, Shinagawa, Tokyo, Japan
Keywords: Manual Wheelchair Assistance, Passive Robotics, Servo Brake, Gravitation-Negating Control, Seat
Inclination Control.
Abstract: Considering the road inclination conditions, we proposed an upper body posture adjustment system for a
passive-type assistive wheelchair. On an inclined road, there is a high probability that a wheelchair will
move in a direction that is different from that desired by its user. In our previous research, we proposed a
system that estimated a wheelchair user’s intentions and worked passively to complement their intentional
force. This was accomplished by negating the wheel traction that was generated by the road’s inclination
using only the servo brakes on each wheel. However, in some cases, our system failed to assist the driving
motion of the user because it negated only the gravitational force. Therefore, our wheelchair succeeded in
avoiding the unintended movement, but its user was required to row the hand rims with a considerable
amount of force to overcome these braking forces. Consequently, we proposed an upper body posture
adjustment system that adapts to the inclined road conditions and reduces the wheel traction that is
generated by gravity. The proposed system inclined the wheelchair seat and aligned the upper body posture
of its user to the center position of the wheelchair. Using this method, the proposed system maintained the
position of the user’s center of gravity with respect to the center position of the wheelchair. Our
experimental findings suggested that the proposed passive-type assistive wheelchair can complement the
user’s intentional force with smaller brake traction, indicating that the user can drive the wheelchair using
less physical strength.
1 INTRODUCTION
Wheelchairs are widely used by mobility-impaired
people in their daily activities. Recently, a number
of serious wheelchair-related accidents have been
reported in Japan. Interestingly, more than 80% of
these accidents were caused by environmental
hazards (National Consumer Affairs Center of Japan,
2002). For example, the inclination of a sidewalk
poses a potentially high risk for wheelchair users.
The Japanese government permits sidewalks to have
an incline of up to 5° (Japan Institute of
Construction Engineering, 2008). Such an
inclination could potentially lead to a wheelchair
deviating from the sidewalk and into the roadway,
which could be catastrophic. Therefore, a wheelchair
driving assistance system is important for use on an
inclined sidewalk.
In previous research, many assistive technologies
have been developed for wheelchairs. For example,
many disabled people routinely use powered
wheelchairs (Yamaha Motor Co., Ltd., 2014). Many
previous researchers have attempted to develop
assistance functions by adding wheels with actuators
that were controlled using robotic technology, such
as motion control (Miller and Slack, 1995), sensing,
and artificial intelligence (Katevas et al., 1997)
(Murakami et al., 2001). These intelligent
wheelchairs provide several functions, such as
suitable motion, obstacle avoidance, and navigation;
thus, they provide a maneuverable system. However,
many wheelchair users have the upper body strength
and dexterity to operate a manual wheelchair. For
these users, such systems may be considerably
expensive and unnecessary.
Therefore, we developed a passive driving
assistance system for a manual wheelchair, which
136
Chugo, D., Kohara, R., Iwaki, M., Muramatsu, S., Yokota, S. and Mashimoto, H.
A Brake-based Assistive Wheelchair Considering a Seat Inclination.
DOI: 10.5220/0006858001360143
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 136-143
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

employs servo brakes (Chugo et al., 2013; Chugo et
al., 2015; Chugo et al., 2016). This system
incorporates the concept of passive robotics (Hirata
et al, 2007). The proposed system passively operates
on the basis of the external forces imposed by its
user. No actuators are required in our system. Our
wheelchair uses servo brakes that can control the
braking torque to produce the desired motion
according to the applied force and reference track.
The system developed in our previous research
estimated the intended direction of a manual
wheelchair user by determining the characteristics of
their hand motion and maintaining it as the reference
track (Chugo et al., 2013). Using the estimated results,
the system negated the effects of gravitational force
on the wheelchair moving on the inclined road
(Chugo et al., 2015) and enabled it to drive in a
direction intended by its user (Chugo et al., 2016).
However, in some cases, our assistive wheelchair
requires its user to use greater physical force to drive
it. This is because the does not use actuators, only
servo brakes, for assistance. On an inclined road, our
wheelchair cancels the gravitational force by means
of the braking torque; therefore, the wheelchair does
not move in an unintended direction. However, the
wheelchair does not provide any driving force, and
the user is required to row its hand rims with greater
force, which overcomes the braking traction. This
problem makes it difficult for some users to operate
our assistive wheelchair, especially an elderly person,
who might have limited physical strength.
To resolve this problem, it is important to
minimize the braking traction, which negates the
gravitational force. On an inclined road, the upper
body posture of the user tends to deviate from the
center position of the wheelchair, and the position of
their center of gravity (COG) moves in the direction
of gravity. This causes a rotational force, which
causes the unintended movement generated by the
gravitational force increases. Therefore, an upper
body posture adjustment is required to reduce the
unnecessary braking force.
Therefore, this paper proposes an upper body
posture adjustment system for wheelchair users. The
proposed system inclines the wheelchair seat
according to the inclination of the road. The
proposed device measures the position of the user’s
COG and keeps it at the center position of the
wheelchair. This paper is organized as follows: In
Section 2, we introduce our assistive wheelchair and
its problem specifications; In Section 3, we propose
an upper body posture adjustment system; In Section
4, we show the results of experiments using our
prototype; In Section 5, we present our conclusions.
2 ASSISTIVE WHEELCHAIR
2.1 System Configuration
Fig. 1(a) shows our prototype. The proposed
wheelchair utilizes a powder brake, which is a type
of servo brake. Powder brakes are widely used in
industrial applications, and their cost is low
compared with other servo brakes. The powder
brake in Fig. 1(b) (ZKG-YN50, Mitsubishi Electric
Corp.) generated enough braking torque to stop a
wheelchair moving at 4 km/h, containing a 100-kg
user, in one second.
Our prototype is based on a normal, manual
wheelchair (BM22-42SB, Kawamura Cycle Co.,
Ltd.), and our system is compatible with an ordinary
wheelchair that meets the ISO7193, 7176/5
standards. This means that a user can incorporate our
system into their wheelchair without any special
construction.
(a) Overview (b) Installed Servo Brake
Figure 1: Our Prototype.
For measuring the road inclination, our
wheelchair has two tilt sensors: one for roll angle
[Fig. 2(a)] and one for pitch angle [Fig. 2(b)]. These
sensors are modularized and connected by USB
cables to the control computer (PC). In this study,
our prototype wheelchair has this module installed
on its frame, under the seat.
2.2 Traction Required to Negate the
Gravitational Force
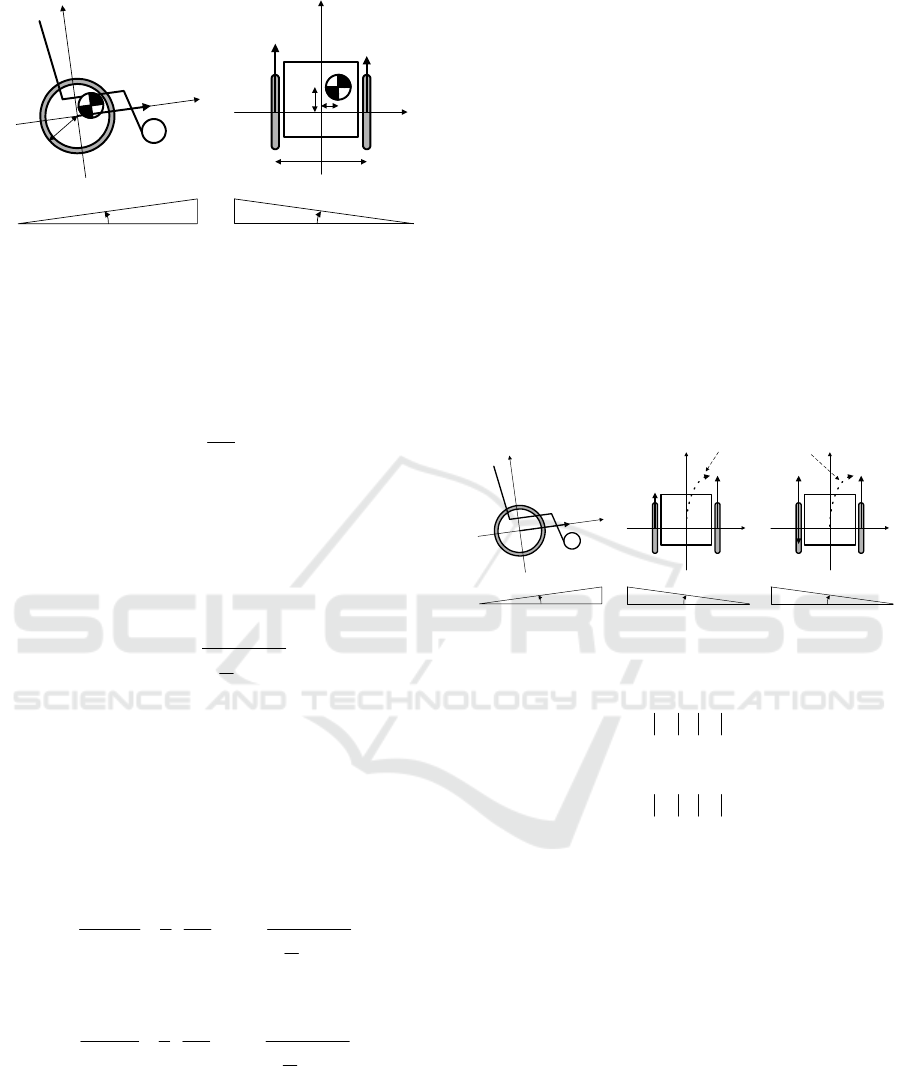
Fig. 2 shows a wheelchair model on an inclined road.
On a slope, the gravitational force pulls the
wheelchair to a lower point on the incline.
A Brake-based Assistive Wheelchair Considering a Seat Inclination
137
y
z
y
x
T
y
g
x
g
f
tl
f
tr
f
sr
, f
sl
θ
γ
r
(a) pitch angle (b) roll angle
Figure 2: Wheelchair model on an inclined road.
Kinematically, when the pitch angle is
θ
, the
gravitational forces applied to the right wheel
sr
f
and left wheel
sl
f
are shown by
sin
2
sr sl
mg
ff
θ
==
(1)
where m is the mass of the wheelchair, including the
user’s body weight.
Furthermore, kinematically, when the roll angle
is
γ
, the gravitational forces applied to the right
wheel
tr
f
and left wheel
tl
f
are shown by
sin
2
g
tr tl
g
ymg
ff
T
x
γ
=− =
−
(2)
where
(
)
gg
yx ,
is the position of the center of
gravity (COG), and T is the distance between the
wheels.
Thus, the required braking traction on each
wheel (
cr
τ
: right wheel,
cl
τ
: left wheel) to cancel
the gravitational force is
sin
1
sin
2
2
g
sr tr
cr
g
ymg
ff
mg
T
rr
x
γ
τθ
+
== +
−
(3)
sin
1
sin
2
2
g
sl tl
cl
g
ymg
ff
mg
T
rr
x
γ
τθ
+
== −
−
(4)
2.3 Problem Specifications in the
Uphill Condition
Our assistive wheelchair on an inclined road negates
the gravitational forces on the road, as in Eqs. (3)
and (4). Our wheelchair does not have actuators and
can only use braking traction. Therefore, especially
in an uphill condition, our assistive wheelchair
requires the user to use more physical strength to
drive it.
For example, when the user goes uphill on a road,
as in Fig. 3, the wheelchair moves to a lower
position because of the gravitational forces on the
road. In this condition, without an assistance system,
a manual wheelchair user should drive the left wheel
hard so that
rl
ff >
, as in Fig. 3(b) (where
r
f
is the
driving force on the right wheel and
l
f
is the
driving force on the left wheel). To negate the
gravitational force, our assistive wheelchair controls
the servo brake according to Eqs. (5) and (6). In this
condition, the wheelchair negates only the rotational
moment generated by the gravitational force because
the servo brake cannot generate a driving force.
y
z
y
x
f
l
f
r
f
r
, f
l
θ
γ
y
x
f
gl
f
gr
γ
f
cl
The wheelchair tends to
move this direction
because of the gravity.
(a) side view (b) top view (w/o assist) (b) top view (w/ assist)
Figure 3: Braking tractions on an inclined road.
()
()
()
,0
cr cr cl cr cl cr
f
riffffelse
ττ
=− > =
(5)
()
()
()
,0
cl cr cl cr cl cl
f
riffffelse
ττ
=− < =
(6)
In the case of Fig. 3(c), our system generates the
braking traction
cl
f
on the left wheel to negate the
gravitational force pulling the wheelchair to a lower
position (in the right direction). In this case, our
wheelchair user should drive each wheel equally so
that
grgl
ff =
(where
gr
f
is the driving force on the
right wheel and
()
gl l cl
f
ff=+
is the driving force
on the left wheel with our assistance force). This
means that the user can row the wheelchair as if on a
flat road. However, the passive system does not
assist the driving force and the required driving
force increases with the braking force
cl
f
on the left
wheel. Therefore, the user may feel that the
wheelchair is too heavy, especially in this uphill
situation.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
138
To reduce the user’s load, the braking traction
cl
f
to negate the gravitational force should be
minimized. From Eqs. (3) and (4), the position of the
COG,
(
)
gg
yx ,
increases the difference between the
right and left braking tractions. This means that if
the position of the COG locates at the center position
of the wheelchair, the user’s load will decrease. On
an inclined road, the upper body posture of the user
tends to deviate from the center position of the
wheelchair. Therefore, it is important to adjust the
upper body posture to reduce the user’s load.
3 UPPER BODY ADJUSTMENT
SYSTEM
3.1 Proposed Device
Fig. 4 shows an overview of the proposed assistance
system. The system consists of a lifting device with
a urethane cushion designed for the wheelchair and
its controller. We designed the lifting device to be as
thin as possible for easy implementation. Generally,
the distance between the seat position and foot
support is important for increasing usability (Defloor
et al., 1999). The thickness of our lifting device is
only 18 mm, and a user can install it without having
to reconfigure the wheelchair.
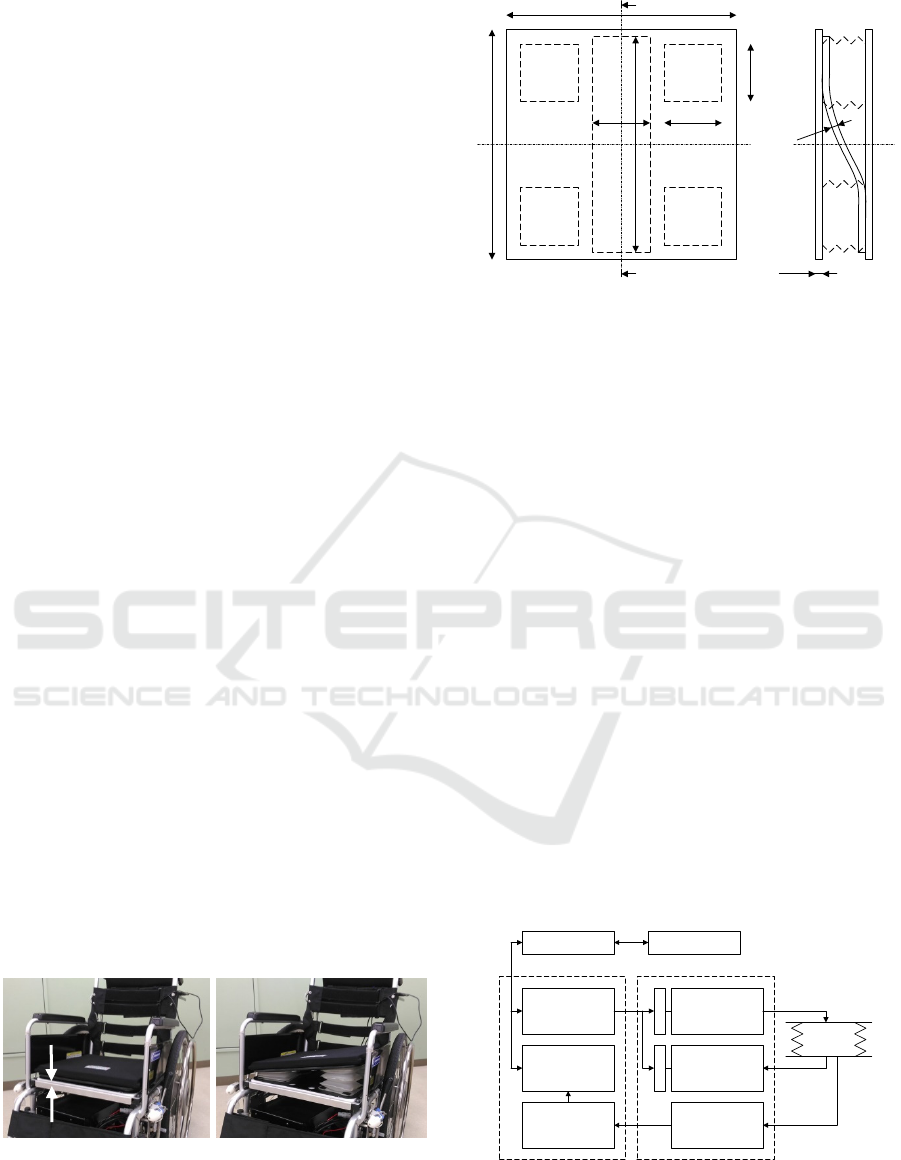
To realize a thin design for our lifting device, we
developed a tilt mechanism that is based on the
elasticity of acrylic resin, as shown in Fig. 5. Also,
to realize a thin mechanism, there is no sensor in the
lifting device. The controller uses only pressure
sensors to estimate the position of the COG of the
user’s upper body. The four air cells, each of which
has an air compressor, lift or incline the aluminum
base, as shown in Fig. 4(b). The acrylic resin also
prevents the base from shifting. The cells can be
cycled more than 20,000 times, according to the
manufacturer’s specifications.
(a) normal position (b) inclined position
Figure 4: Proposed upper body posture adjustment system.
A
A
390
390
100
100100
380
A-A
6
6
(1)
(1) (1)
(2) (2)
(2) (2)
(2)
(2)
(3)
(3)
Figure 5: Design of a lifting device. (1) aluminium base,
(2) air cell, and (3) acrylic resin.
Fig. 6 shows the controller for our posture
adjustment system. It consists of a control box,
which contains interface modules connected to a
control PC by USB cables and an air compressor
module, which contains air compressors, solenoid-
operated valves, and pressure sensors. Both parts are
small and can be installed within a wheelchair body.
The controller requires a 12-V, 2.8-A power supply
in order to lift a 100-kg user, and the standard
batteries in the servo brake system can supply it.
Therefore, the proposed posture adjustment system
does not require additional batteries for the
controller.
Our posture adjustment system has four air cells,
each of which has an air compressor, solenoid-
operated valve, and pressure sensor. To lift the seat
cushion, the system drives the air compressors. To
lower it, the system stops the compressors and opens
the solenoid-operated valves. The elasticity of the
acrylic resin helps the air cells shrink in the case
where no user is seated in the chair. A sensor on
each air cell measures pressure in real time, and the
controller uses the measured data to position the
COG of the user.
Digital output
(Contec
DIO0808LY-USB)
AD Converter
(Contec AI-0608AY-
USB)
Air Compressor
(OKENSEIKO
PFR32B28)
Relay
Solenoid Operated
Valve (TDL Co.,
TDS-V06A-713)
Relay
Pressure Sensor
(Keyence AP-44)
Air-Cell
Control PC
No.1-4
No.1-4
No.1-4
No.1-4
USB
Control Box
Pressure Sensor
Amplifier (Keyence
AP-C40)
Air-Compressor Module
No.1-4
Air
Air
Human Interface
Figure 6: Overview of our controller for a posture
adjustment system.
18 mm
A Brake-based Assistive Wheelchair Considering a Seat Inclination
139

3.2 Position Estimation of the Center of
Gravity
The distribution of pressure on the sitting surface
inflects the posture of the user’s upper body (Rader
et al., 1999). Therefore, we use the position of the
user’s COG on the wheelchair seat as an index to
estimate their upper body posture.
To estimate the position of the COG on the
wheelchair seat, we use the pressure sensor on each
air cell. This position
()
,
cc
x
y
is derived from (7).
The position and coordination of pressure sensors
are shown in Fig. 7. The pressure values
()
4,,1 =ip
i
are measured by the sensor on each air
cell.
()()
{}
()()
{}
4
141 232
1
4
121 342
1
ci
i
ci
i
x
ppx ppx p
yppyppy p
=
=
=+ ++
=+ ++
(7)
Sensor1
x
1
x
2
y
1
y
2
x
y
l
l
h
1
(Height)
P
1
(Pressure)
Sensor2
Sensor3 Sensor4
h
2
(Height)
P
2
(Pressure)
h
3
(Height)
P
3
(Pressure)
h
4
(Height)
P
4
(Pressure)
(a) sensor position (b) kinematical relationship
Figure 7: Kinematics of proposed upper body posture
adjustment system.
3.3 Control Algorithm for the
Proposed Device
The proposed device inclines the wheelchair seat
according to the position of the user’s COG.
However, to realize its thin profile, there are no
sensors in the lifting device, and the control box
contains only the air pressure sensors. Therefore, the
system cannot measure the seat inclination directly.
Instead, the controller estimates the seat inclination
using only its pressure sensors and realizes the
reference inclination, which aligns the position of
the user’s COG to the center position of the
wheelchair. The proposed scheme calculates the
volume of the air cells by integrating the airflow
during lifting.
The lifting height h(T) when the air compressor
works for T seconds is derived by
()
()
vT
hT
s
=
(8)
where v(T) is the volume of an air cell and s is its
cross-sectional area. Also, v(T) is the integration of
the airflow, and the volume of the air cell is changed
according to its pressure. The relationship between
the cell’s volume and pressure is inversely
proportional according to Boyle’s law. Therefore,
v(T) is defined by (9) when its pressure is p(T):
() () ()
()
()
0
T
vT pT u pt ptdt⋅= ⋅
(9)
where u is the airflow of the compressor in the case
of an inflow (
0u >
) or the solenoid-operated valve
in the case of an outflow (
0u <
). Also, u is a
function of the pressure p in the air cell that the
pressure sensor can measure. Meanwhile, T is the
operating time of the air compressor or valve. The
parameters of u are derived based on the
manufacturer’s specifications. In this case, we set u
as in (10):
()
()
0
0
ii
oo
ap b u
u
ap b u
−+ >
=
−− <
(10)
where
5
6.7 10
i
a
−
=×
,
53
12.5 10 sec
o
amkPa
−
=× ⋅
,
5
7.66 10
i
b
−
=×
, and
53
3.2 10 [ sec]
o
bm
−
=×
are
constants. From Eqs. (8) to (10), the estimated lifting
height is derived from (11). Our system integrates
the instantaneous height from the start time to T and
can estimate the lifting height through odometry. We
assume that the temperature is constant.
()
()
()
()
()
0
1
T
hT apt b pt dt
spT
=+⋅
⋅
(11)
Using the height estimation scheme, we can
estimate the inclination of the lifting device from
(12). The estimated height
i
h
of each air cell (
4,,1 =i
) is given by (12), and l (=250 mm) is the
distance between them, as shown in Fig. 7(b). The
inclination value is small, and we use approximate
equations, as in (13):
()
{
}
()
{
}
()
{}
()
{}
12 34
14 23
22
22
hh hh
l
hh hh
l
γ
θ
−+ ++
=
−+ + +
=
(12)
sin , sin
γγ
θθ
≈≈
(13)
Our system realizes the pitch
γ
and roll
θ
inclinations as follows. From the kinematic
relationship, the height of each air cell should be
fulfilled as follows:
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
140

() ()
21
32
34 41
0, 0
hh
hh
if if
hh
hh
γθ
>
>
>>
>
>
(14)
Using (14), our controller sets the minimum
height of an air cell
0
h
from the reference inclination.
If
0
γ
>
and
0
θ
>
, our controller sets
10
hh=
and
derives
2
h
to
4
h
using (12) and considering the
restraint condition that the all air cells are all
connected to the same plane. Because the outflow is
larger than the inflow, we set
[
]
0
10hmm=
to
improve the response time of our device. If the
controller discharges all the air from the cell, the
charging time will be long. Using these principles,
the controller of the proposed device can realize the
reference inclinations.
The proposed system inclines the wheelchair seat
when the position of the user’s COG does not align
with the center position of the chair: it tries to return
the user to their original position. The inclination
references
()
,
ref ref
γ
θ
are generated by the simple
PID controller as in (15). Considering the individual
differences, as in (16), the proposed controller uses
the position of the user’s COG when they sit on the
seat in a natural sitting posture as a position control
reference. In many cases, this reference
()
,
org org
x
y
is
almost the center position of the wheelchair seat
()
0, 0
org org
xy≈≈
, which means the proposed
system adjusts the position of the COG to the center
position of the chair.
0
0
T
e
ref p e i e d
T
e
ref p e i e d
dx
kx k xdt k
dt
dy
ky k ydt k
dt
γ
θ
=− + +
=− + +
(15)
,
ecorg ecorg
x
xx y yy=− =−
(16)
3.4 Preliminary Experiment with the
Proposed Device
In this experiment, we set the proposed wheelchair
on two inclined roads (
4, 8
γ
=−
°;
0
θ
=
°). On these
roads, our wheelchair could be stopped using the
handbrake. Each of five subjects (subjects A–E in
Table 1) sat in our prototype, which adjusted the
positions of their COGs. To verify the effectiveness,
the subjects tried each tried to navigate the inclined
road without the proposed device.
Fig. 8 shows the experimental results. In each
case, using the proposed device, the positions of the
COGs were located around the center position
compared with the results without the device.
Therefore, the proposed device is effective for
adjusting the position of the COG on the wheelchair
seat.
(a)
4
γ
=−
° (b)
8
γ
=
°
Figure 8: Position of COG (x-direction) on an inclined
road.
4 EXPERIMENTS
4.1 Experimental Setup
In this experiment, the 14 subjects listed in Table 1
tested our prototype. The subjects moved from side
to side in a figure of eight on a test road with an 8°
incline using our prototype wheelchair with upper
body posture adjustment assistance, as shown in Fig.
9. This course had the typical characteristics of an
inclined sidewalk environment: (A) is a straight
uphill path; (B) is curved uphill path; (C) is a
straight downhill path; and (D) is curved downhill
path. To compare the effectiveness of the proposed
assistance system, the subjects repeated these trials
in wheelchairs without the system. Furthermore, for
accurate verification, the subjects did not know how
the proposed assistive system worked and whether
the trials were with or without the system.
Table 1: Subjects.
Subject
Weight
[kg]
Height
[m]
Gender Age
Hand
edness
A 50 1.66 male 23 left
B 52 1.64 female 22 right
C 42 1.60 female 23 right
D 61 1.74 male 24 right
E 53 1.70 male 21 right
F 67 1.84 male 23 both
G 55 1.65 male 24 right
H 60 1.74 male 24 right
I 57 1.67 male 23 left
J 56 1.72 male 21 right
K 65 1.77 male 24 right
L 60 1.75 male 21 right
M 50 1.54 female 23 left
N 50 1.54 female 22 right
-100
-80
-60
-40
-20
0
ABCDE
Position [mm]
Subject
No Assist
With Assist
0
20
40
60
80
100
ABCDE
Position [mm]
Subject
No Assist
With Assist
A Brake-based Assistive Wheelchair Considering a Seat Inclination
141
4m
4m
8deg
Start/Goal Position
(A)
(B)
0.75m
(C)
(D)
y
x
(A)
(B)
(C)
(D)
(a) overview of a test course (b) real environment
Figure 9: Test course on an inclined road.
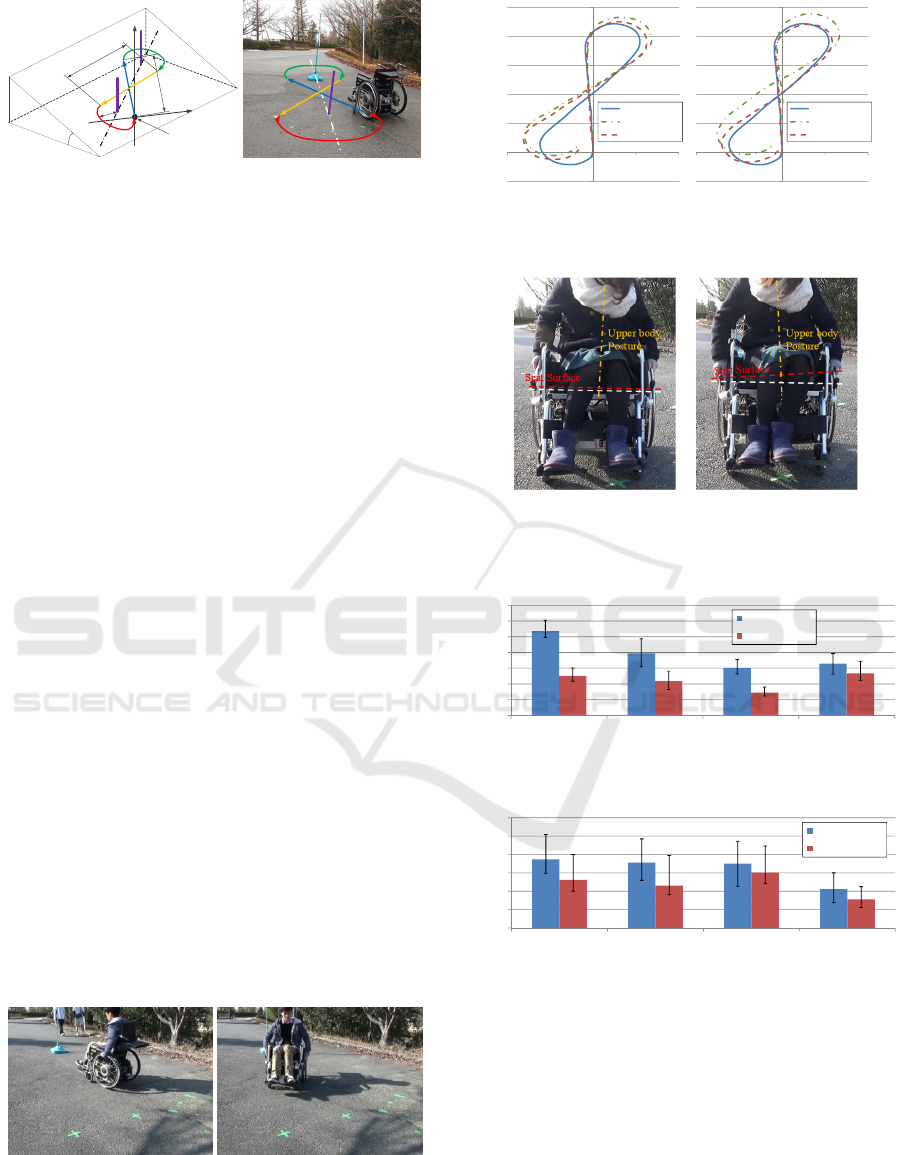
4.2 Experimental Results
The results show that the subjects could drive in an
intended direction when using our system (Fig. 10).
Fig. 11 shows the running tracks of the wheelchair.
With the proposed assistance system, the subjects
could drive the wheelchair according to the
reference path, compared with the running tracks
without the system. This tendency was the same for
left- and right-handed subjects.
Fig. 12 shows the inclination of the seat surface
as the wheelchair passed section C. From Fig. 12(b),
it can be seen that our assistive system inclined the
seat surface according to the inclination angle of the
road and succeeded in adjusting the upper body
posture of the subject. While adjusting the upper
body posture, the maximum braking traction, which
negates the gravitational force, decreased, as shown
in Fig. 13. Especially in a straight uphill path
(section A), the proposed system reduced the
braking traction by more than 50%, and this means
that the subject could drive the wheelchair using less
physical strength. As a result, the driving velocity
increased and, as shown in Fig. 14, the time required
to pass through each section decreased.
To investigate how the proposed system feels to
its users, we conducted the questionnaire survey in
Table 2. Typically, such a questionnaire has scales
of 1–5 or 1–7. In this experiment, to avoid a
concentration of “neither” responses, as is the
Japanese habit (Takahashi et al., 2013), we used a
scale of 1–6.
(a) passing (A) (b) passing (C)
Figure 10: Test run by subject A with the proposed
controller.
(a) subject A (left handed) (b) subject B (right handed)
Figure 11: Running tracks.
(a) without assistance (b) with assistance
Figure 12: Inclination of seat surface and upper body
posture at passing (C) (subject C).
Figure 13: Maximum braking traction in each section.
Figure 14: Passing time for each section.
Fig. 15 shows the questionnaire results. In the
results from Q1 to Q3, the subject feels that the
driving force is light with our assistance system.
Furthermore, the results from Q4 and Q5 indicate
that the subject felt that it was easy to drive on the
reference path with our system. We can verify this
result from the running tracks in Fig. 11. The results
from Q6 and Q7 indicate that the subject felt that the
driving assistance was better with the proposed
device. The assistance algorithm with the servo
-1
0
1
2
3
4
5
-2 -1 0 1 2
Y [m]
X [m]
Reference
Without Assist
With Assist
-1
0
1
2
3
4
5
-2 -1 0 1 2
Y [m]
X [m]
Reference
Without Assist
With Assist
0
5
10
15
20
25
30
35
ABCD
Brake Traction [Nm]
Section
Without Assist
With Assist
0
3
6
9
12
15
18
ABCD
Time [Sec]
Section
Without Assist
With Assist
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
142
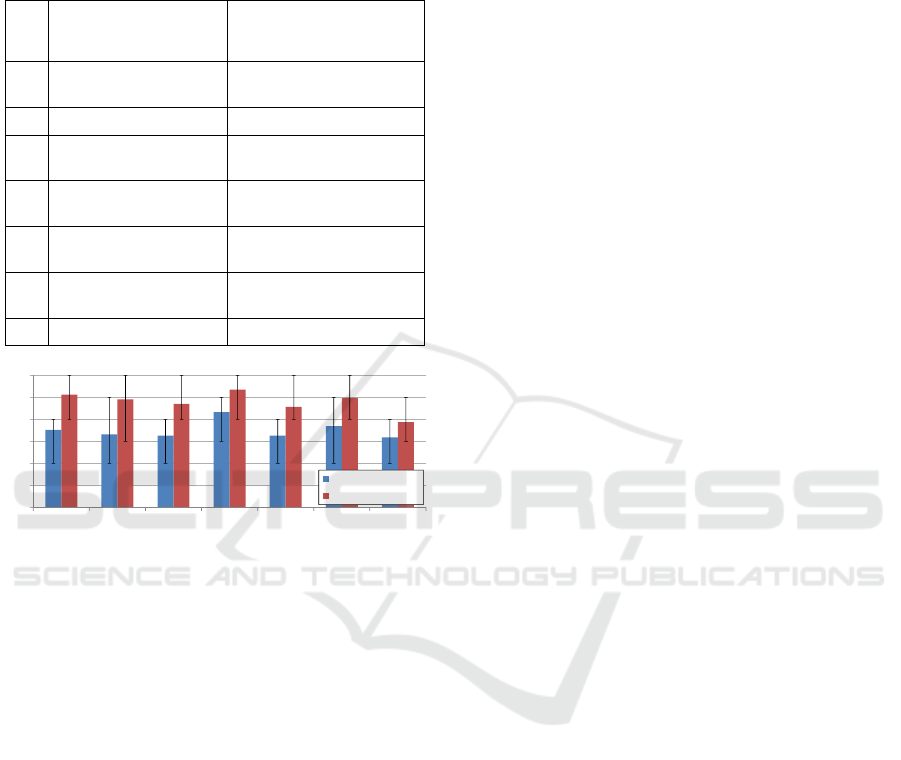
brake was the same; therefore, by adjusting the
upper body posture, the subjects felt that the
assistance effectiveness was better.
Table 2: Questionnaire.
Higher Score
(Maximum is 6)
Lower Score
(Minimum is 1)
Q1
I do not feel fatigue in
this trial.
A feel fatigue in this trial.
Q2 A hand rim is light. A hand rim is heavy.
Q3
It is easy to strain my
arm.
It is hard to strain my arm.
Q4
It is easy to drive on the
straight path.
It is difficult to drive on
the straight path.
Q5
It is easy to drive on the
curved path.
It is difficult to drive on
the curved path.
Q6
The assistance is
smooth.
The assistance is awkward.
Q7 The assistance is quick. The assistance is slow.
Figure 15: Questionnaire results.
5 CONCLUSIONS
This paper proposed an upper body posture
adjustment system for wheelchair users on an
inclined road. Our system succeeded in maintaining
the user’s body balance. As a result, the gravitational
force caused by road inclination was reduced, and
the required braking traction for wheel driving
assistance was also reduced. Consequently, the user
could use less force with the proposed system.
ACKNOWLEDGEMENTS
This work is supported in part by Hyogo Foundation
for Science and Technology, Kawanishi Memorial
ShinMaywa Education Foundation and Exploratory
Research on Feasibility Study (FS) Stage
(AS242Z00295K) by Adaptable and Seamless
Technology Transfer Program through Target-driven
R&D, Japan Science and Technology Agency (JST).
REFERENCES
National Consumer Affairs Center of Japan, 2002.
Considering the safety of self-propelled manual
wheelchairs, In NCAC News, Vol.14, No.3, pp.4.
Japan Institute of Construction Engineering, 2008. A
Sidewalk guideline for smooth mobility, 2nd edition,
ISBN: 4802893922. (in Japanese)
Yamaha Motor Co., Ltd., 2014. JW Swing,
http://global.yamaha-motor.com/ymgn/group_topics/2014/11_03/
D. P. Miller and M. G. Slack, 1995. Design and Testing of
a Low-Cost Robotic Wheelchair Prototype, In
Autonomous Robots, Vol.2, pp.77-88.
N. I. Katevas, et al., 1997. The Autonomous Mobile Robot
SENARIO: A Sensor-Aided Intelligent Navigation
System for Powered Wheelchairs, In IEEE Robotics
and Automation Magazine, Vol.4, No.4, pp.60-70.
Y. Murakami, Y. Kuno, N. Shimada and Y. Shirai, 2001.
Collision avoidance by observing pedestrian’s faces
for intelligent wheelchairs, In Proc. of Int. Conf. on
Intelligent Robots and Systems, pp.2018-2023.
D. Chugo, T. Higuchi, Y. Sakaida, S. Yokota, and H.
Hashimoto, 2013. A Driving Assistance System for a
Manual Wheelchair using Servo Brakes, Proc. of 10th
Int. Conf. on Informatics in Control, Automation and
Robotics, pp.259-266.
D. Chugo, N. Goto, S. Muramatsu, S. Yokota, and H.
Hashimoto, 2015. Robotic Driving Assistance System
for Manual Wheelchair User on Uneven Ground, Proc.
of 2015 IEEE Int. Conf. Rehab. Robot, pp.648–653.
D. Chugo, N. Goto, S. Muramatsu, S. Yokota, and H.
Hashimoto, 2016. Wheelchair Assistance with Servo
Braking Control Considering both the Gravitation-
Negating and the User’s Intention-Based Assistance,
Proc. of 13rd Int. Conf. on Informatics in Control,
Automation and Robotics, pp.335-343.
Y. Hirata, A. Hara and K. Kosuge, 2007. Motion Control
of Passive Intelligent Walker Using Servo Brakes, In
IEEE Trans. on Robotics, Vol.23, No.5, pp.981-990.
T. Defloor and M. H. Grypdonck, 1999. Sitting posture
and prevention of pressure ulcers, In Appl. Nurs. Res.,
Vol.12, pp.136-142.
J. Rader, D. Jones and L. Miller, 1999. Individualized
wheelchair seating: Reducing restraints and improving
comfort and function, In Top. Geriatr. Rehabil.,
Vol.15, pp.34-47.
K. Takahashi, T. Yakou, and K. Yamamoto, 2013. Effect
of scale division ranks on sensory evaluation value as
a mechanical engineering design, In Trans. of the
Japan Society of Mechanical Engineers, Vol.89,
pp.2329-2337. (in Japanese).
0
1
2
3
4
5
6
Q1 Q2 Q3 Q4 Q5 Q6 Q7
Score
Without Assistance
With Assistance
A Brake-based Assistive Wheelchair Considering a Seat Inclination
143
