
Efficient Fuzzy based Image Mosaicing Algorithm for Overlapped
Aerial Images
Abdelhai Lati
1,2
, Mahmoud Belhocine
3
and Noura Achour
1,2
1
Laboratoire de Robotique, Parallélisme et Systèmes Embarqués LRPSE,
BP 32, El Alia, Bab Ezzouar, 16111, Alger, Algeria
2
Université de Sciences et Technologie de Houari Boumedian USTHB,
BP 32, El Alia, Bab Ezzouar, 16111, Alger, Algeria
3
Centre du Développement des Technologies Avancées CDTA,
Cité 20 août 1956, Baba Hassen 16303, Alger, Algeria
Keywords: Aerial Images, Image Mosaic, Fuzzy ILBP.
Abstract: This article presents an efficient technique for aerial image mosaicing algorithm of overlapped pair of
Unmanned Aerial Vehicle (UAV) images. Our algorithm is based on detecting some sparse distinguished
set of pixels from captured image. Therefore, in the first stage, FAST algorithm was proposed for
determining locations of feature pixels. Local binary pattern (LBP) technique is robust for describing
features pixels, but it still suffers from different problems, such as noise and errors in interpolating values of
surrounding pixels. Fuzzy logic theory partially solves the noise sensitivity problem associated with LBP
approach, therefore; in the second part of this article, a robust method based on fuzzy logic technique was
used to create Fuzzy Improved Local Binary Patterns descriptors (Fuzzy ILBPDs) for features matching
purpose, after that; homography matrix will be estimated through the best associated features; in order to
project the overlapped UAV images. The results of our algorithm maps for some benchmark and effective
numerical comparisons with previous related works are presented in this paper.
1 INTRODUCTION
Unmanned aerial vehicles (UAVs) have become an
increasingly familiar technology and have become
smaller, more capable, and less expensive because of
both military investment in the UAV industry and
improved technology. Current generation UAVs can
be transported in small vehicles and launched from a
road or a small truck but are still large enough to be
equipped with cameras and sensors that can provide
low cost aerial information (Edward and
McCormack, 2008) .The UAV based platform for
photogrammetric and remote sensing; is a more
flexible and easy way to provide high resolution
images with lower cost. So building UAV based
platforms is becoming a hot field throughout the
whole world. For some aerial images, it is often
necessary to analyze a complete scene section at
high resolution which has large dimensions (a large
number of pixels). However, in some cases the high
resolution single image cannot be viewed even if
using cameras with tens of millions of active pixels.
The common approach of image mosaicing (Capel
and Zisserman, 1998) is to acquire several images of
parts of the scene at high magnification and
assemble them into a composite single image which
preserves the high resolution. The performance of an
image mosaicing algorithm depends mainly on the
performance of used techniques for features
detection and matching .Since Local Binary Patterns
Descriptors (LBPDs) (Ojala et al., 1996) provide
good and robust description for the detected key
points in two overlapped images, fast and good
features matching can be obtained using the
measured Hamming distance between two LBPDs,
therefore, they are getting more and more popular
over SIFT and SURF when combined with simple
detector for the key point detection.
The aim of our study is to present and investigate
the performance of a novel approach for LBP
descriptors, because, most methodologies employed
for creating LBP descriptors have little tolerance to
uncertainty. The novel type of descriptors, which is
more capable of dealing with such problems, can be
Lati, A., Belhocine, M. and Achour, N.
Efficient Fuzzy based Image Mosaicing Algorithm for Overlapped Aerial Images.
DOI: 10.5220/0006826702290236
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 229-236
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
229

developed by incorporating fuzzy logic (Dimitris et
al., 2008), in the Local Binary Pattern methodology.
This article is organized in 6 sections. In section
2, some related works concerning some UAV image
mosaic construction will be discussed as the state of
the art. In section 3, the entire scheme for image
mosaicing algorithm will be described. In section 4,
the proposed Fuzzy Improved LBP method is
described. In section 5, a comparative experimental
evaluation reveals the advantageous performance of
the proposed method in comparison to other
methods applied on real aerial images. In section 6,
conclusions and future perspectives are presented.
2 RELATED WORKS
Signal processing programs used on a PC are allowed
for rapid development of algorithms, rapid debug and
test application. Matlab is such an environment
treating an image as a matrix, which allows
optimized matrix. UAV image mosaicing, with high
speed and robust accuracy, presents a significant
challenge. Thus, there have been many researches in
this area during the past few decades. In (Nemra,
2010), UAV was enabled to construct a reliable map
of an unknown environment and localize themselves
within this map without any user intervention. To
construct this map; Adapted SIFT detector was used
to extract and match features between all the images.
Another strategy was proposed for registering
and mosaicing UAV data “aerial images” (Ming et
al., 2012), Firstly, the total number of the pyramid
octaves in scale space was reduced to speed up the
matching process; sequentially, RANSAC was
issued to eliminate the mismatching tie points. The
method described in (Cheng-Chuan et al., 2012) was
to estimate the homography matrices that can
precisely register UAV images onto the Google
satellite map with less distortion. SIFT was used to
perform image registration between consecutive
UAV images. But this algorithm was a great
challenging task due to quality mismatch between
overlapped images. The method described in
(Nagaraja et al., 2014) was proposed for
construction of mosaic image from an underwater
video sequence. Difference of Gaussian (DoG)
technique, which is part of SIFT was used for
feature detection, then; for each interest point, a
texture descriptor was constructed using CS-LBP
(Heikkila et al., 2006) technique to describe the key
point. Then feature descriptors were matched using
Nearest Neighbour Distance Ratio (NNDR) to
measure the similarity.
3 IMGE MOSAICING
3.1 Features Detection
This stage is based on extracting a set of pixels
(features) among the whole image pixels, then
applying the necessary image analysis on these
detected set of pixels. Points are the ideal features
for image registration because their coordinates can
be used directly to determine the parameters of the
transformation function, and also due to their
invariance to the image geometry and their facilities
to be detected using simple detectors (Goshtasby et
al., 2005).
3.2 Features Matching
Once the interest points have been extracted, the
matching is to find for each point of an image, its
correspondent in the other image knowing that the
image points are projections of the real 3D points of
the same scene. Several matching methods were
proposed in the literature (Nemra, 2010), these
methods can be classified into three categories:
methods based on correlation comparison criteria,
methods based on features descriptors and other
methods based on features tracking.
3.3 Image Transformation
After finding the pairs of matched features, selecting
an appropriate transformation model to compute the
image alignments is an important step for image
mosaicing (Patidar and Jain, 2011). Different types
of transformations models exist for this purpose
(Szeliski, 1994).but projective homography is the
most general motion model for image mosaicing
applications; where the scene is planar or almost
planar and the camera undergoes a rigid motion.
3.4 Image Projection
Image warping is the act of projecting two
overlapped images on each other according to a
mapping between source image I (x,y) and
destination image I’(x,y). Alignment of images may
be imperfect due to registration errors resulting from
incompatible model an assumption. Therefore,
different blending techniques can be used to
compensate these errors (Richard, 2006).
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
230
4 FUZZY IMPROVED LBP
Classical algorithm for Local Binary Patterns (LBP)
is a binary system description which expresses the
relationship of size of a gray image pixel point and
its neighbour-hood pixels points; it was originally
used to describe image texture information (Ojala et
al., 1996). Nowadays, research workers put forward
a lot of improved LBP algorithms that have been
applied in features matching; face recognition, etc;
and that because of its simple computation
complexity and partial scale, rotation, and
illumination invariance (Ning et al., 2007).
In LBP algorithm, every feature pixel in an
image generates a single LBP code. Then a decimal
value is calculated for the different LBP codes. The
LBP codes forms the LBP feature vector, which
characterize the image features. The LBP is based on
hard thresholding of surrounding pixels, which
makes features description sensitive to noise. In
order to improve the LBP approach, we have
considered fuzzy logic theory (Ying and Dali, 2006).
Fuzzy logic resembles human decision making, with
ability for finding precise solutions in approximate
datasets collection.
The use of fuzzy logic in the LBP approach
includes the transformation of the input variables to
respective fuzzy variables, according to a set of
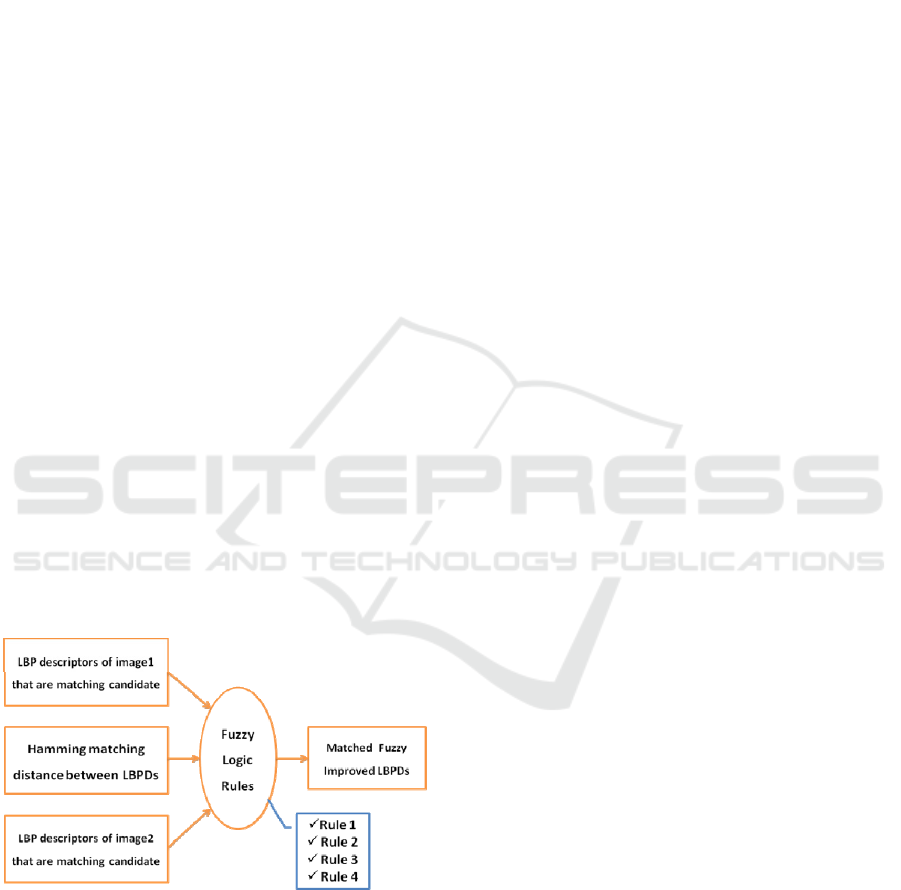
fuzzy rules. Our proposed algorithm, which is
presented in figure 1, is based on three fuzzy
variables sets and four fuzzy rules, each one of these
rules depend mainly on Hamming distance between
the Improved LBP Descriptors.
Figure 1: The used Fuzzy ILBPDs algorithm.
The fuzzy Improved LBPDs can be created by
following these steps :
1) Detect points based features for each image
using one of the robust detectors (FAST,
Harris, SIFT ... etc).
2) Create LBP descriptors around the detected
features using the first nearest eight
neighborhoods pixels, and distance of one
pixel from the center pixel.
3) Recreate LBP descriptors around the
detected features using the second nearest
eight neighborhoods pixels and distance of
two pixels from the center pixel.
4) Repeat procedure (3), till the n
th
nearest
neighborhoods pixels and a specified n
distance of pixels.
5) Put the obtained eight elements vectors from
step (4) in one long binary vector of (n
8)
elements; and label them as Improved LBP
Descriptors.
6) Apply Hamming distance to find the
matching candidates, among the created
Improved LBPDs of image 1 and the created
Improved LBPDs of image 2.
7) Based on the calculated Hamming distances,
and the matching candidates, apply fuzzy
rules to choose the final matched Improved
LBP descriptors among ILBPDs 1 and
ILBPDs 2.
The obtained set of pairs of matched features
from fuzzy based ILBP descriptors can be used for
finding an appropriate projective transformation
between overlapped images.
5 FUZZY ILBP BASED IMAGE
MOSAICING ALGORITHM
Different algorithms were proposed for aerial image
mosaicing. Since we are looking for robust
algorithm, we have chosen a simple corner detector
for features detection; and an improved LBP
technique for features matching. Our contribution in
this algorithm is integrating fuzzy logic theory in the
stage of image mosaicing construction; in this stage;
we have proposed to enhance the performance of
LBP based features matching technique, by using
fuzzy rules, in order to eliminate false associations.
5.1 FAST Corners Detector
The Features from Accelerated Segment Test
(FAST) corner detector was developed by Rosten
and Drummond in 2006; it has a simple and fast
corner detection algorithm to find local invariant
points. It finds corners in the image by comparing
pixel gradients in a neighborhood of pixels.
FAST algorithm defines corner point as: (In the
neighborhoods of a pixel, there are enough pixels in
Efficient Fuzzy based Image Mosaicing Algorithm for Overlapped Aerial Images
231
different region and their gray values are greater
than or less than the central pixel’s (Rosten and
Drummond, 2006). The reason behind the work of
the FAST algorithm was to develop an interest point
detector for use in real time frame rate applications
like SLAM on a mobile robot (e.g. UAVs), which
have limited computational resources.
The Corner Response Function of FAST
detection algorithm to judge whether a pixel is a
corner point is defined as CRF as follows:
( ) ( )
xcirclep
CRF I x I p
ε
∈
=−
(1)
Where
p : means the central pixel;
I(p): means the gray value of pixel p;
I(x) : means gray value of the neighbour-hood;
ε :is a given threshold value.
If CRF is greater than a given threshold, this
pixel point is considered as a corner point. However
some pseudo corner points can appear with this
algorithm (Rosten, 2011). To extract FAST corners,
a grey scaled image is sufficient and allows much
faster extraction than RGB one. In order to detect an
existing corner, the grey scale of the pixels lying on
the discrete circle is compared with the centre pixel
p. If a certain consecutive number of differences lie
above or below a certain threshold t, the considered
pixel is marked as corner. The chosen threshold
serves as parameter for controlling the total numbers
of extracted corners in a given image (Rosten, and
Drummond, 2005).
5.2 Improved LBP Descriptors
From the description of LBP technique, it is clear
that it involves only simple arithmetic operations,
since we are looking for good matching results with
less calculation time; we have proposed to use a
novel modified version of this technique; which
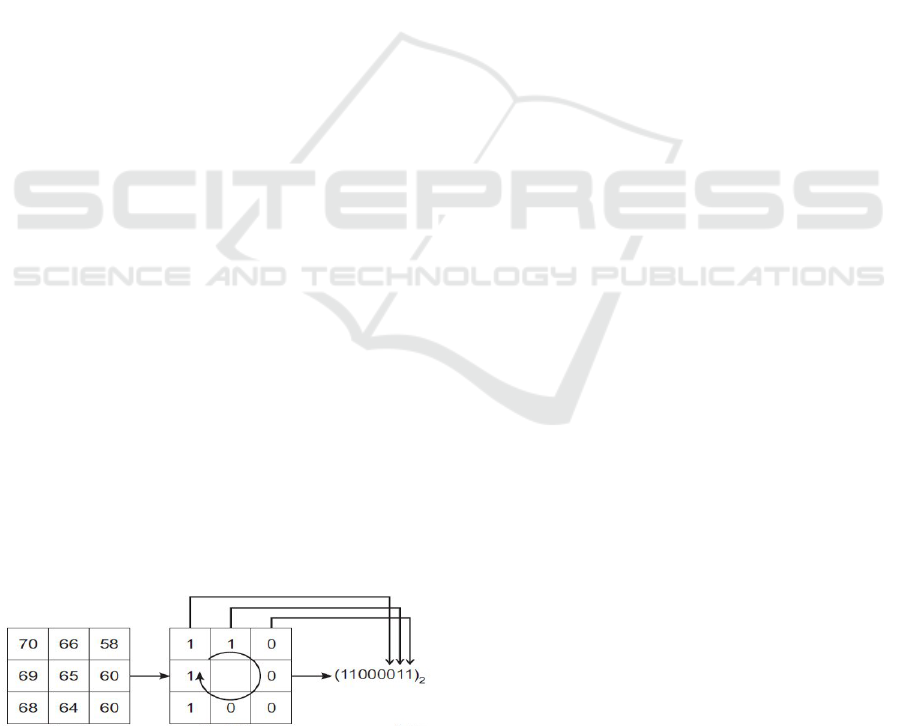
satisfies our desires. Figure 2, illustrates the
necessary steps to create eight elements LBP vector
around a feature pixel of gray level of value 65.
Figure 2: Construction of LBP descriptor.
In our case we have used window size of eight
elements for creating the LBP descriptors, but many
different sizes of neighbourhood can be used, each
element of LBP can be obtained by comparing
central the pixel with its eight neighbours, as given
in equation 2:
,
,
1
( ) 1 8
0
pi c
pi c
if g g
L
BP i i
if g g
=≤≤
(2)
Where:
g
c
is the detected interest point.
g
p, i
is one of the eight pixels around g
c
.
By concatenating N eight elements LBP vector,
we can get a long (8 × N) binary vector called
Improved LBP descriptor, in which N depends on
the chosen radius from the detected point features to
the central feature pixel.
5.3 Hamming Matching Distance
Improved LBPDs depend only on increasing radius;
and keeping at each time eight pixels in the
neighbours. If two ILBPDs are compared, small
distance value context between them is a sign of
good match ability, the distance between two ILBDs
is measured using the Hamming distance, which is a
simple bitwise exclusive or (XOR) instruction
(Zhou, 2014) . Hence, computation and matching of
ILBDs can be implemented efficiently. For two
feature points, p
ij
and p
i’j’
from images i and i’
respectively, we can compute the matching distance
as given by equation 3:
'' ''
(, ) (, )
Sijij hamijij
dpp d hh=
(3)
Where
''
,
ij i j
hh
: refers to ILBPD1 and ILBPD2.
d
ham
: Hamming distance between ILBPDs.
In the ideal case; the Improved LBP descriptors
of the matched features should be completely
coinciding, in other words, the distance between
them should be zero. Some relation should be made
to avoid mismatching due the noise in the binary
vectors. For that, we have imposed to use fuzzy
logic theory to eliminate some false association.
5.4 Fuzzy Improved LBPDs
The fuzzy logic theory is used in our work; to
determine the correct matches between two
overlapped images. The inputs to the fuzzy logic for
every pair of matched key points which are defined
by ILBP descriptors are as follows:
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
232
1) The measured Hamming distance (d
H
)
between every two ILBP descriptors.
2) Belongingness of the ILBP descriptor to its
region (R1) in image 1.
3) Belongingness of the ILBP descriptor to its
region (R2) in image 2.
The belongingness of an ILBP descriptor in R1 is
given by the measured correlation criterion of
features of the created binary descriptors with
features of image 2 .Similarly belongingness of
ILBP descriptor in R2 is also defined as vice versa.
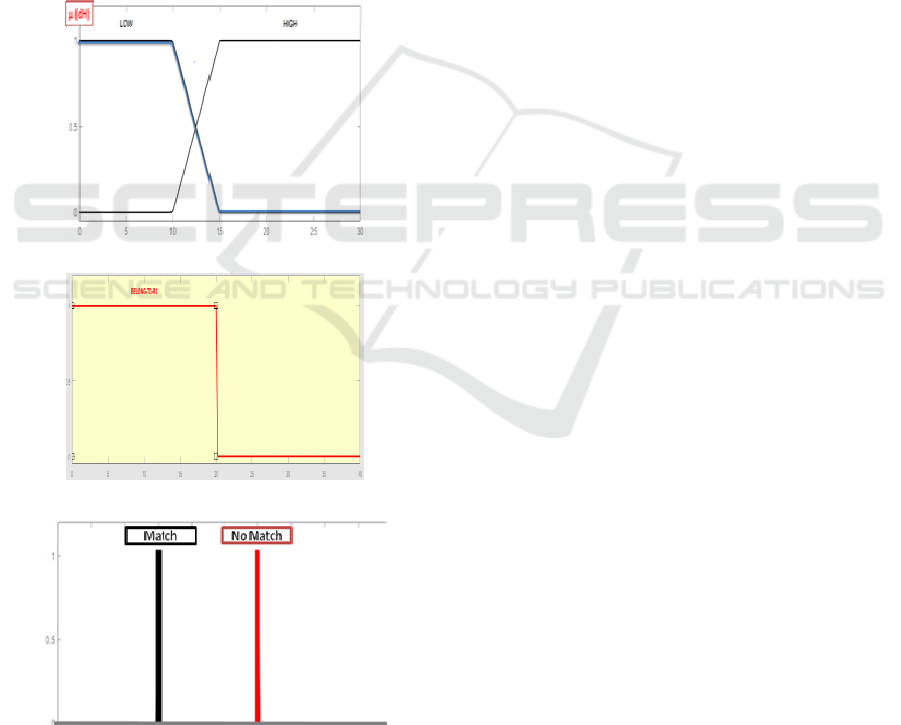
The membership functions for input variable
’Hamming distance measure’ is defined as ’low’,
and ’high’ (see Figure 3 (a)). The input variable
’belongingness’ is defined by sigmoid function,
shown in Figure 3 (b). Output variable is defined by
(a)
(b)
(c)
Figure 3: (a) The 1
st
input membership function ‘hamming
distance’(d
h
). (b) The 2
nd
input membership function
‘Belongingness to R1/R2’. (c) The output membership
function ‘match/ no match’.
Gaussian functions for ’match’, ’low’ and ‘no
match’ (see Figure 3 (c)). For each matched features
of overlapped images using ILBP descriptors, a
Hamming measure and correlation criterion (in our
case we have used Sum of Absolute Difference) are
calculated, then, fuzzy logic which is discussed in
previous section is used to find if the key points are
said to be semantically matched or not.
The following are the fuzzy rules used for the
proposed system to determine the matching decision.
The defuzzification method used in our case for the
output is centroid method.
1. If (d
H
is low) and (r1 is belong) and (r2 is
belong) then (ILBPDs match).
2. If (d
H
is high) and (r1 is not belong) and (r2
is not belong) then (ILBPDs do not match).
3. If (d
H
is low) and (r1 is not belong) and (r2 is
belong) then (ILBPDs do not match).
4. If (d
H
is high) and (r1 is belong) and (r2 is not
belong) then (ILBPDs do not match).
During the matching process, the distance
between the ILBP descriptors for two image features
is computed with Hamming distance and the
correlation score is calculated to determine the
belongingness of ILBPDs. Then these distance and
scores are used as the crisp inputs of the fuzzy
system. The membership values of the measured
hamming distance is found for two fuzzy set Low
and High, and the membership values for the
calculated correlation scores is found for two fuzzy
set either belong or not. The rules are evaluated and
finally the output decision is obtained from the zero
order Sugeno type output membership function
(singleton) as a Match or No Match.
5.5 Homography Estimation
Homography or projective transformation is the
suitable image mapping model for image mosaicing
purpose, which is a planar transformation with 8
degrees of freedom. Each pair of point
correspondence generates 2 linear equations for the
elements of H and hence 4 correspondences are
enough to solve for the homography directly (Capel
and Zisserman, 1998).
If more than 4 pairs are available, a solution for
element of H can be estimated using a linear least-
square method. Matrix H can be defined as follows:
=
11
'
'
333231
232221
131211
y
x
hhh
hhh
hhh
y
x
(4)
Efficient Fuzzy based Image Mosaicing Algorithm for Overlapped Aerial Images
233

Each pair of matched features gives two linear
equations:
0)('
0)('
232221333231
131211333231
=−−−++
=−−−++
hyhxhhyhxhy
hyhxhhyhxhx
(5)
Hence, N pairs of points generate 2N linear
equations, which may be arranged in a matrix design
as follows:
AH=0 (6)
The solution for H is the one-dimensional kernel
of A, which may obtained from the SVD. For N>4
points, this equation will not have an exact solution.
In this case, a solution may be obtained which
minimizes the algebraic residuals, r = AH, in a least-
squares sense, by taking the singular vector
corresponding to the smallest singular value.
5.6 Backward Image Warping
Using homography matrix, overlapped images were
warped (figure 4); we have determined bounds of
the new combined image where the corners of left
image would fall in the coordinate frame of the right
image. This was done by multiplying homography
on the corner point coordinates. Then we have
attempted to lookup colors for any of these positions
we got from the left image as given by this equation:
1
*'
x
Hx
−
=
(7)
Figure 4: Backward image warping.
5.7 Interpolation Blending Technique
It is a simple approach, in which; the pixel values in
the blended regions are weighted average from the
two overlapping images. Sometimes, it is better to
take more than two neighbor pixels in interpolation
process. In our case, we have used the bilinear
interpolation algorithm; which is slightly more
sophisticated interpolation method, it interpolates
pixel value from the nearest four mapped source
pixels, and this simple algorithm produces excellent
results.
6 SIMULATION RESULTS
Matlab is a powerful software platform which can be
used for the development of several applications. In
our case, due to the provided image processing
predefined functions with Matlab toolbox; Matlab
software is suitable for the development of complex
image processing algorithms such as image
mosaicing algorithm. To test the proposed image
mosaicing algorithms, we have used Matlab running
on a computer that disposes 4 GB of RAM, CPU of
Intel i7 generation and Intel graphic card. We tested
our image mosaicing approaches on the images of
Aerial Robotics Data sets (AerialRobotics, 2014).
Figure 5; shows the used overlapped aerial images,
which have overlapping percentage of about 30 %.
Figure 5: The two overlapped UAVs images.
Figure 6: The detected features using FAST algorithm.
Figure 6 shows the detected corners features in
the two images, in which we can see that
repeatability condition is well verified using this
type of points based features.
Figure 7: Features matching using LBP.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
234
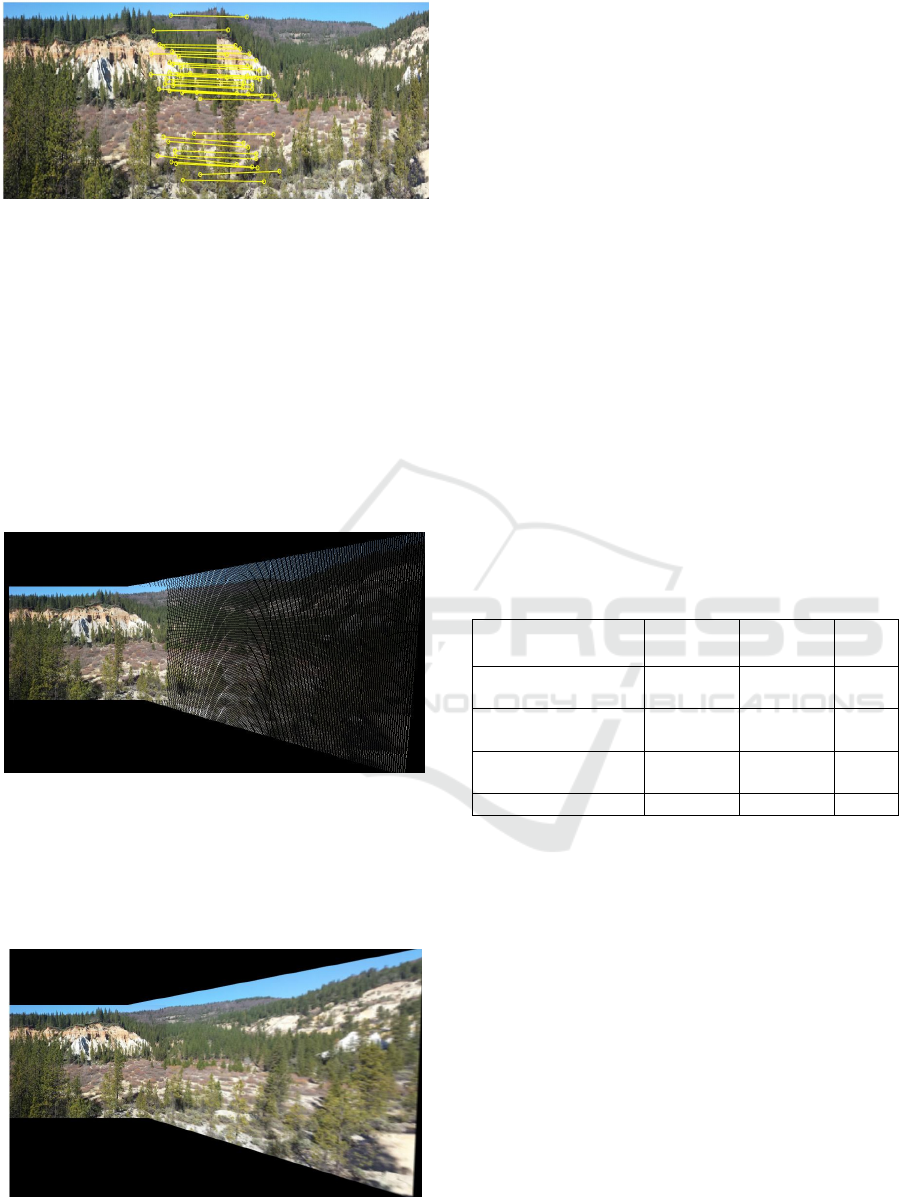
Figure 8: Features matching using fuzzy ILBP.
Figure 7 shows the obtained features correspond-
ence between the input images; using LBP
descriptors, in which we can notice the existence of
a lot of incorrect matches. But with the fuzzy
ILBPDs; we can visually notice that this approach
provides good matching results as shown in figure 8.
After homography estimation, we have used this
transformation matrix to warp images as shown in
figure 9. The black gaps are because images aligned
after undergoing geometric corrections most likely
require further processing to eliminate remaining.
Figure 9: The obtained mosaic using backward warping.
That is why; we have used an interpolation
blending technique, based on bilinear interpolation
to get seamless image mosaic, which is shown in
Figure 10.
Figure 10: The blended mosaic using interpolation.
• RESULTS DISCUSSION
Our method was compared visually and numerically
with recent state-of-the-art algorithm in the
literature. Performance evaluations in terms of
computation time show success of our algorithm. In
(Taygun et al., 2016), by the same simulation tools,
SIFT point detector was used for extracting images
salient elements, and BRIEF descriptor was used to
describe and match key-points. The matching
results, show that big difference in calculation time
between our algorithm and that of (Taygun et al,
2016), which is due to the simplicity of calculation
using fuzzy ILBP Descriptors; contrary to
SIFT/BRIEF descriptors.
Since visual comparisons can be subjective, a
numerical evaluation of the algorithms is also
necessary. To evaluate the algorithm performances,
feature matching errors present in the results of each
method are calculated in terms of recall (Hassaballah
et al., 2016), which depends mainly on the ratio
between number of inliers and outliers. The
following table summarizes the comparison of our
simulation results and compares it to other results
obtained by using the same simulation platforms.
Table 1: Comparison of simulation results.
Methods Features1 Features 2
Recall
CS-LBP
(Nagaraja et al, 2014)
262 274 0.71
SIFT
( Lowe, 2004)
256 243 0.62
SURF
(Bay et al, 2008)
233 263 0.68
Our Method 345 326 0.73
7 CONCLUSIONS
LBPDs based matching technique has different
advantages such as tolerance against illumination
changes, computationally simple and efficient. The
main drawback of LBP is that by increasing the
radius from the detected interest point, the algorithm
is not too robust. In order to overcome this
drawback; we have proposed to extend version of
LBP into fuzzy improved LBP. The fuzzy ILBP
descriptors outperform the existing local descriptor
for most of the test cases, especially for images with
severe illumination variations and they capture
better gradient information than original LBP. We
recommend for future work using other type of
images such as IR areal images.
Efficient Fuzzy based Image Mosaicing Algorithm for Overlapped Aerial Images
235

REFERENCES
Edward D., McCormack., 2008. ‘The Use of Small
Unmanned Aircraft by the Washington State Department
of Transportation’. Washington State Transportation
Commission.
Capel D., Zisserman A., 1998. “Automated Mosaicing with
Super-resolution Zoom”. Robotics Research Group,
Department of Engineering Science.University of Oxford
Oxford OX1 3PJ, U.K.
Ojala, T., Pietikäinen, M., Harwood, D., 1996. “A compara-
tive study of texture measures with classification based on
featured distribution. Pattern Recognition”, Vol. 29, pp
51-59.
Dimitris K., Iakovidis., Eystratios G., Keramidas., Dimitris
Ma., 2008. ‘Fuzzy Local Binary Patterns for Ultrasound
Texture Characterization’. International Conference
Image Analysis and Recognition ICIAR Image Analysis
and Recognition, pp 750-759.
Nemra A., 2010. “Robust Airborne 3D Visual Simultaneous
Localisation And Mapping”. PHD Thesis . Cranfield
University.
Ming Li., Deren Li., Dengke F., 2012. “A Study on automatic
UAV image mosaic method for paroxysmal disaster”.
International Archives of the Photo grammetry, Remote
Sensing and Spatial Information Sciences. Melbourne,
Australia.
Cheng-Chuan, C., Shih-Ming, H., and Ching-Chun, H., 2012.
“Image Registration among UAV Image Sequence and
Google Satellite Image Under Quality Mismatch” The
12th International Conference on ITS Telecommunica-
tion. PP 311-315.
Nagaraja, S., Prabhakar, C. J., and Praveen Kumar, P. U.,
2014. (Parallax effect free mosaicing of underwater video
sequence based o texture features) . Signal & Image
Processing: An International Journal (SIPIJ) Vol.5, No.5.
Heikkila, M., Pietikainen, M., and Schmid, C., 2006.
“Description of Interest Regions with Center-
SymmetricLocal Binary Patterns”, In Computer Vision,
Graphics and Image Processing, ICVGIP 2006, vol.
4338, pp. 58-69.
Goshtasby, A. A., 2005.“2-D and 3-D Image Registration for
Medical, Remote Sensing, and Industrial Applications”.
Published by John Wiley & Sons, Inc., Hoboken, New
Jersey. Published simultaneously in Canada.
Patidar, D., and Jain, A., 2011. “Automatic Image Mosaicing:
An Approach Based on FFT”. International Journal of
Scientific Engineering and Technology. Page 1-4 .Vol 1.
Issue 1. India .
Szeliski, R., 1994. “Image Mosaicing for Tele-Reality
Applications”. Technical Report series. Cambridge
Research Laboratory.
Richard, S., 2006. “Image alignment and stitching: a tutorial”,
Found. Trends. Comput. Graph. Vis. 2 .pp1–104.
Ojala, T., Pietikainen, M., and Harwood, D., 1996. “A
comparative study of texture measures with classification
based on feature distributions”, Pattern Recognition, vol.
29, no. 1, pp. 55-59.
Ning, S., Zhenhai, J., and Cairong, Z., 2007.“ Gender
classification based on local binary pattern”. Journal of
Huazhong University of Science and Technology .pp
177-181. Chinese.
Ying, B., and Dali, W.,2006. “Fundamentals of Fuzzy Logic
Control”. Publisher: Springer, Londo pp 17-36.
Rosten, E., and Drummond, T., 2006.“ Machine learning for
high-speed corner detection”. European Conferen-ce on
Computer Vision. pp 430-443. Graz, Austria.
Rosten, E., 2011. “FAST Corner Detection Homepage”.
http://svr- www.eng.cam.ac.uk/ er258/work/fast.html.
Rosten, E., and Drummond, T., 2005. “Fusing points and
lines for high performance tracking”. In Proceedings of
the International Conference on Computer Vision
(ICCV). pp 1508-1511.
Zhou, Z., 2014. “FPGA Implementation of Computer Vision
Algorithm”. A thesis submitted in partial satisfaction of
the requirement for the degree of Master of Science in
Electrical Engineering. University of California
(Riverside).
AerialRobotics Dataset,. 2014.. ftp://www.aerial robotics.eu/
accessed: 2014-03-30.
Taygun, K., Alper, Y., and Mustafa, U., 2016. ‘A new
approach to real-time mosaicing of aerial images’.
Elsevier Jornal of robotic and autonomous systems.
Hassaballah, M., Abdelmgeid, AA., and Hammam, A., 2016.
“Image Features Detection, Description and Matching”.
Springer International Publishing Switzerland.
Lowe, D. G., 2004. “Distinctive Image Features from Scale-
Invariant Keypoints”, International Journal Computer
Vision, 2(60), pp.91-110.
Bay, H., Ess, A., Tuytelaars, T., and Gool, L. V., 2008.
“Speeded-Up Robust Features (SURF)”, Computer
Vision and Image Understanding, 113(3), pp. 346-359.
APPENDIX
The obtained results of applying our algorithm on
other aerial images “Hakekasa data set “from
(AerialRobotics, 2014):
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
236
