
Automatic Fault Detection using Cause and Effect Rules for In-vehicle
Networks
Alexander Kordes, Sebastian Wurm, Hawzhin Hozhabrpour and Roland Wism
¨
uller
Operating Systems & Distributed Systems, University of Siegen, H
¨
olderlinstraße 3, Siegen, NRW, Germany
Keywords:
Cause and Effect Rules, Machine Learning, In-vehicle Sensor Network, Fault Detection.
Abstract:
In-vehicle networks (IVNs) connect Electronic Control Units (ECUs) for automotive applications. Most of
the communication on the IVNs directly affect the comfort or even the safety of the driver. Therefore, it is
necessary to monitor these systems in order to find the cause and effect of a fault. Current developments
use plausibility checks in automotive ECUs to enhance safety and security. Within the LEICAR project in
cooperation with INVERS GmbH we focus on all sensors signals recorded directly from CAN bus IVNs for
this positional paper. Even without the knowledge of the sensors semantics it is possible to extract cause and
effect rules for all recorded sensor signal relationships of the vehicle, map them in a graph and extract certain
situations. The proposed solution detects direct and slowly evolving changes even if they propagate across
several involved sensor values. For the automatic fault containment we extract features from the cause and
effect rules to train a machine learning model in order to make predictions on new data. Besides that it is
possible to implement optimized error checking procedures for the involved ECUs.
1 INTRODUCTION
Robust fault detection is a stringent requirement for
the evaluation of safety-critical applications on in-
vehicle networks (IVNs). Unfortunately, the search
space in recorded IVN sensor data increases with the
number of sensors mounted to the vehicle. In terms
of autonomous driving the number of involved sen-
sors and actuators increases with every new vehicle
model. Sensors and actuators are connected to elec-
tronic control units (ECUs) which transmit the sensor
data over the internal network. Therefore, the auto-
motive engineers of vehicle manufacturers spend a lot
of time with manual fault detection for vehicle proto-
types, if the faults are not detected by the on-board
diagnostics (OBD), which only performs plausibility
checks on the sensor data. However, faults effecting
the causal relationship between the sensor signals in
the IVN, which are not detected by the OBD, may oc-
cur during the machine life of a vehicle. These faults
can propagate through the IVN and need knowledge
about the whole system, to find the cause of them. It
should be mentioned that the detection of faults, that
occur but just affect the system slowly over a long
period of time, like mechanical wear, is very time-
consuming for vehicle repair shops.
This is why we focus in this paper on a method
for automatic situation detection, in order to reduce
the search space for the automotive engineers. It is a
part of the LEICAR project
1
. The method presented
in this paper is adapted from (Hira and Deshpande,
2016) and adjusted by us in order to manage IVN
sensor data instead of socio-economic indicators, like
in the original method. We calculate causal relation-
ships between sensors, to obtain features for an au-
tomatic fault detection with machine learning algo-
rithms. This is verified with simulation and real IVN
data in which we first detect situations and later per-
form automatic fault detection. In the future it could
be possible to integrate better fault detection mech-
anisms in the vehicle using the outcome of the pro-
posed method.
This conceptional paper is organized as follows:
We describe the relevant parts of the method of mod-
eling cause and effect rules for socio-economic indi-
cators in Section 2. In Section 3, we state the prob-
lems consisting of applying cause and effect rules to
IVN sensor data and extending the rules for automatic
fault containment. The related work is shown in Sec-
tion 4. In Section 5, we present the proposed method
based on the creation of extended cause and effect
1
Partially funded by German Federal Ministry of Edu-
cation and Research (BMBF).
Kordes, A., Wurm, S., Hozhabrpour, H. and Wismüller, R.
Automatic Fault Detection using Cause and Effect Rules for In-vehicle Networks.
DOI: 10.5220/0006792605370544
In Proceedings of the 4th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2018), pages 537-544
ISBN: 978-989-758-293-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
537

rules and their visualization. We also discuss de-
tectable faults and the limits of the proposed method.
The effectiveness of the method is reviewed in Sec-
tion 6 using simulated and real data of a vehicles brak-
ing situations. We conclude this paper in Section 7.
2 EXTRACTION OF CAUSE AND
EFFECT RULES
For a better understanding, we will briefly discuss the
most important aspects of the calculation of binary
cause and effect rules described in (Hira and Desh-
pande, 2016). The approach is used to model the de-
picted relationships in Figure 1 between various stock
market prices. The arrows in Figure 1 indicate a re-
lationship in the sense of a cause and effect rule be-
tween the two time series P
i
and P
j
. The arrow points
from the cause to the effect and if the cause occurs,
the effect takes place after a time lag ` > 0. The time
series of the stock market prices in (Hira and Desh-
pande, 2016) have one sample per year.
CyclicTransitive
Binary
Many to one
P
1
P
2
P
3
P
1
P
2
P
3
P
1
P
2
P
2
P
1
Figure 1: Causal relationships.
For the extraction of cause and effect relationships
it is necessary to calculate the rate of change (ROC)
per time series first. The ROC is an extension of
the momentum, which is a simple technical analysis
where indicators show the difference between, e.g.,
today’s closing price and the close n days before. The
ROC is expressed as a ratio between a change in one
time series relative to a corresponding change in an-
other. Graphically, the ROC is represented by the
slope of a line.
To identify relationships between two time series
P
i
and P
j
, first the ROC γ
i,k
of every time series P
i
in
the k − th year is calculated. δ defines the minimum
ROC used to consider a significant change. In (1)
each time series value is categorized as a positive
ROC (U), a negative ROC (D) or no ROC (Q). The
type of change R
i,k
is defined as follows:
R
i,k
=
U if γ
i,k
≥ δ
D if γ
i,k
≤ −δ
Q if −δ ≤ γ
i,k
≤ δ
(1)
The result from equation (1) is used to calculate the
strongest relationship between two time series with
a time lag `. The direct relationship D
i, j,k,`
between
two time series P
i
and P
j
, regarding to a time lag `, is
calculated according to:
D
i, j,k,`
=
1 if(R
i,k
= U ∧ R
j,k+`
= U)∨
(R
i,k
= D ∧ R
j,k+`
= D)
0 otherwise
(2)
In case of the direct relationship, if the rate of change
of P
i
matches with the rate of change of P
j
after a time
period `, the support count of the direct relationship is
defined as:
S
D
(P
i
,P
j
,`) =
n−`
∑
k=1
D
i, j,k,`
(3)
The support percent of the direct relationship between
P
i
and P
j
is defined as:
α
D
(P
i
,P
j
,`) =
S
D
(P
i
,P
j
,`)
n − `
(4)
Thus, the temporal direct relationship between two
time series P
i
and P
j
for a time lag ` is defined in (5),
with α
1
defined as the threshold for all causal rela-
tionships.
P
i
`
−→ P
j
if α
D
≥ α
1
(5)
The inverse relationship I is defined as:
I
i, j,k,`
=
1 if(R
i,k
= U ∧ R
j,k+`
= D)∨
(R
i,k
= D ∧ R
j,k+`
= U)
0 otherwise
(6)
The support count S
I
is defined as:
S
I
(P
i
,P
j
,`) =
n−`
∑
k=1
I
i, j,k,`
(7)
Thus, the support percent of indirect relationship α
I
is defined as:
α
I
(P
i
,P
j
,`) =
S
I
(P
i
,P
j
,`)
n − `
(8)
The strength of the relationship Θ
R
is defined as:
Θ
R
(P
i
,P
j
) = α · log(n), where
α = α
D
(P
i
,P
j
,`) or α
I
(P
i
,P
j
,`)
(9)
The count of the number of pairs when no rate
of change in P
i
is associated with positive or neg-
ative rate of change in P
j
after a time period `
is called neutral-change C
E
(P
i
,P
j
,`). The count
for the inverse relationship is called change-neutral
C
F
(P
i
,P
j
,`) and the count for a neutral ROC is called
neutral C
N
(P
i
,P
j
,`). The definitions should be taken
from (Hira and Deshpande, 2016).
With the calculated relationships, the temporal
odds ratio TOR is defined. The direct odds ratio OR
D
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
538

and the temporal indirect odds ratio OR
I
between two
time series P
i
and P
j
for a time lag ` are defined as:
OR
D
(P
i
,P
j
,`) =
S
D
(P
i
,P
j
,`) ·C
N
(P
i
,P
j
,`)
C
E
(P
i
,P
j
,`) ·C
F
(P
i
,P
j
,`)
(10)
OR
I
(P
i
,P
j
,`) =
S
I
(P
i
,P
j
,`)
C
E
(P
i
,P
j
,`) ·C
F
(P
i
,P
j
,`)
(11)
If the result of a neutral relationship C
N
(P
i
,P
j
,`),
C
E
(P
i
,P
j
,`) or C
F
(P
i
,P
j
,`) between two time series
P
i
and P
j
is zero, it is considered as one to avoid an
infinite temporal odds ratio TOR.
According to (Hira and Deshpande, 2016) a bi-
nary rule set (BRS) exists between P
i
and P
j
if there
is a temporal association rule P
i
`
−→ P
j
and OR
D
≥ β
or OR
I
≥ β, where β is the threshold for the tempo-
ral odds ratio TOR. The BRS is defined as a tupel
BRShP
i
,P
j
,y,`, α,T ORi, with the names of the time
series P
i
and P
j
, the trend y, direct D or inverse I, the
time lag `, the support percent of the relationship α
and the temporal odds ratio TOR.
The rules not explained here, are described in the
article (Hira and Deshpande, 2016) in more detail.
3 PROBLEM STATEMENT
Fault detection in IVNs sensor data currently does not
consider causal relationships to automatically find de-
fined situations of recorded vehicle data. A situation
recognition can reduce the search area if, for exam-
ple, an error occurs only in a certain driving situation,
such as a braking situation. The causal relationships
between sensor values can, on the one hand, indicate
errors in situations where they change or no longer ex-
ist, but on the other hand they can also be used to set
up dependency graphs between sensors. This makes
fault detection much easier for the expert.
In this positional paper we examine IVN sensor
data which are recorded on the CAN bus of a vehi-
cle or simulated for test purposes. A recording of a
trip is called a trace. We understand the individual
recorded sensors data as a single time series. The en-
tire recording is therefore taken as a set of time series
of the form T = {T
i
,T
j
|i, j = 1,...,n}. When calcu-
lating causal rules, always two time series of set T , T
i
and T
j
are used for the method with T
i
6= T
j
.
During fault analysis in IVNs, currently there are
not enough causal rules to properly map the relation-
ships between all recorded sensor signals. The cause
and effect rules can be used to characterize various sit-
uations, to later identify them automatically in IVNs,
where faults have occurred. This limits the search
space for faults and can be used for visualization and
verification using, e.g., a requirement specification.
Extended cause and effect rules can also be used as a
feature for machine learning procedures in automatic
fault detection and fault prediction methods. In partic-
ular, changes that occur especially in the case of tem-
porally changing relationships between components
can be detected and predicted very effectively using
cause and effect relationships, as is the example of
mechanical wear in braking situation.
The recorded sensor signals from the IVN can ei-
ther be noisy and unmodified raw output from sensors
or pre-processed and fused signals. The IVNs sen-
sor signals could not have the same sampling rate and
therefore, cannot be compared directly at any time,
which is not the case in the example of stock mar-
ket prices (one sample per year). In order to calculate
cause and effect relationships from sensor signals, dif-
ferent pre-processing steps must be carried out first,
to reduce noise and change their sampling rate to an
identical one by interpolation.
The next step is calculating the cause and effect
relationships for given situations. The strongest rela-
tionships between the sensors describe this particular
situation. To determine the correct mode of operation,
the rules have to be visualized and proven by expert
knowledge.
For the automatic detection of faults in certain sit-
uations, especially slightly changing relations over a
long period of time, the cause and effect rules have to
be extended in order to detect the situations of interest
and provide good features for training and subsequent
verification of, e.g., a machine learning model.
4 RELATED WORK
Vehicles can be affected by a wide variety of faults.
In order to avoid personal injury it is of great inter-
est to detect critical faults as early as possible. How-
ever, according to (Rosich et al., 2012) simple plausi-
bility checks are carried out in many error diagnosis
systems, like the self-diagnostic and reporting system
(OBD) of a vehicle. These systems just check sen-
sor values against predefined threshold values. There
are also improved methods of verification like (Ko-
rte et al., 2012; Kordes et al., 2014; Deb et al., 2013).
Above all, not only individual sensors can be checked,
but also the entire sensor network of a machine can
be examined. However, in (Rosich et al., 2012) it is
pointed out that the complexity of methods should not
become so high that they are no longer practically ap-
plicable. Thus, it is necessary to use techniques to
model all causal relationships between all involved
time series and have exact knowledge of it, which re-
Automatic Fault Detection using Cause and Effect Rules for In-vehicle Networks
539

quires expert knowledge. In addition, this knowledge
must be used to create competing models, from which
the best is selected through system identification.
To validate individual sensor values, the principal
component analysis is used by (Kerschen et al., 2005)
and artificial neural networks are used by (Xu et al.,
1999; Klimkowski, 2016). In the mentioned proce-
dures, only individual sensors are checked for fault-
lessness. This means that no relationships (causal-
ity) between the sensors are used to draw conclusions
about the entire system state or related sub-sections.
According to the current state of research, there
are several methods for including causality. The ap-
proach of (Tucker and Liu, 2004) describes how dy-
namic Bayesian networks, trained from existing sen-
sor data, are used to model the dependencies between
sensors as a dependency graph. This method is used
to visualize changes in the dependency structure and
thus identify faults. In the approach of (Alippi et al.,
2014) a dependency graph is created to find relations
between sensors, based on the Granger causality con-
cept. The proposed statistical framework is then com-
bined with a hidden Markov model to find and isolate
errors in the sensor network.
The proposed method of (Hira and Deshpande,
2016) for creating cause and effect rules is compared
to both, the Granger causality and the Bayesian net-
works. They conclude that their method is faster
and can determine not only binary but also transitive,
cyclic and many to one relations. Since we want to
model all possible causal relationships between sen-
sor signals, we will expand the described method and
apply it to IVNs.
5 PROPOSED SOLUTION
In this section we describe our analysis and imple-
mentation of an offline situation and fault detection
method for IVNs, based on the approach of (Hira and
Deshpande, 2016). It is extended by a pre-processing
step to handle IVN sensor signals and is corrected in
some places. In the current state of research, we only
use the calculation of the BRS
2
.
On the one hand, the calculation of cause and ef-
fect rules is used to create graphs with causal rela-
tionships of the sensors in various situations and on
the other hand, for the reduction of the search space
and further feature extraction for error detection. The
extracted features are used for training, test and val-
2
The future work consists among other things of mod-
eling all causal relationships presented in (Hira and Desh-
pande, 2016).
idation of a decision tree algorithm to automatically
detect faults.
In the following sections we describe the adjust-
ments to the original method of (Hira and Deshpande,
2016) and pre-processing steps for the use of IVN
sensor signals with it. Afterwards we describe our
method of situation learning in order to detect them
automatically in recorded traces. Finally, we discuss
certain fault detection methods for different faults.
5.1 Adjusting Cause and Effect Rules
for IVN Data
Generally, we follow the implementation of (Hira and
Deshpande, 2016). Instead of the ROC we use the
slope m
i,k
, to calculate the relationships between two
time series T
i
and T
j
. δ is redefined to the minimum
slope to consider a significant change and instead of
stings we use numerical values
3
to calculate the R
i,k
,
redefined as:
R
i,k
=
1 if m
i,k
≥ δ
−1 if m
i,k
≤ −δ
0 if −δ ≤ m
i,k
≤ δ
(12)
Furthermore, the definition of the temporal inverse
odds ratio OR
I
defined in 11 has been corrected by us,
using C
N
as a multiplier in the numerator, because the
odds ratio is the same calculation as the cross product
ratio defined in (Mosteller, 1968). The new definition
of the temporal inverse odds ratio OR
I
is:
OR
I
(P
i
,P
j
,`) =
S
I
(P
i
,P
j
,`) ·C
N
(P
i
,P
j
,`)
C
E
(P
i
,P
j
,`) ·C
F
(P
i
,P
j
,`)
(13)
Finally, we redefined the BRS by deleting
the ROC and adding the mean of the slope µ
and the standard deviation of the slope σ to
BRShT
i
,T
j
,y,`, α,T OR,µ, σi. These values are also
used as features for an automatic fault detection.
Further adjustments will be done in the future
work, if we add other causal relationship types to the
binary relationship, used in the proposed solution.
5.2 Pre-processing IVN Sensor Data
The starting point of our analysis is comparing the
features of time series from the stock market prices,
which are used as input for the cause and effect rule
modeling of (Hira and Deshpande, 2016) and time se-
ries from recorded test drives in IVNs in different sit-
uations like parking, braking, normal drive behavior
3
The use of numerical values is convenient for compu-
tation for large, multidimensional arrays.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
540
over short and longer time periods etc. The main dif-
ferences are: The time series of IVNs do not all have
the same sampling rate, they can have different reso-
lutions starting from one bit
4
up to several bytes, they
can have positive and negative values, they have a lot
more data points and they can be affected by noise.
Therefore, we implemented different pre-processing
steps.
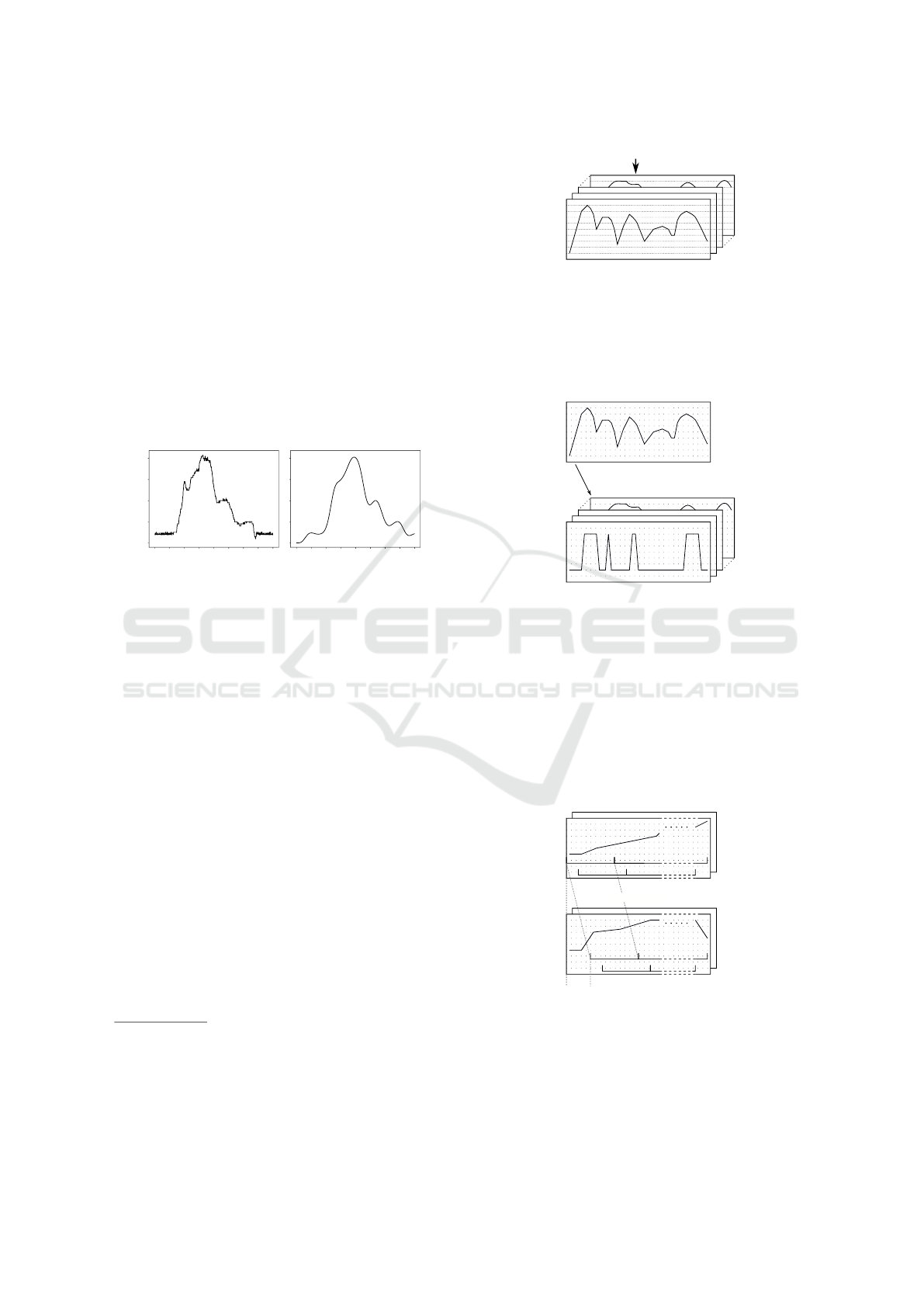
First, we extract the sensor signals from the IVNs
recorded trace file as described in (Kordes et al.,
2018). The signals are re-sampled to construct new
data points within the range of the discrete set of
known data points of every sensor signal. To reduce
the noise of some signals, we use a low pass filter.
Figure 2 a) shows the original signal and b) shows
the smoothed signal
5
. After the pre-processing we
Time Time
Value
a)
b)
Value
Figure 2: Low pass filter.
get a set of time series T = {T
1
,T
2
,..., T
n
}. The pre-
processing has to be done just for IVN sensor data.
5.3 Situation Learning
A situation is described by the strongest relationships
between all involved sensor values during the period
of time, the situation occurs. In the current state of
research, we only use the BRSs as describing rela-
tionships. In case of IVN sensor data, we assume that
the pre-processing step has already been performed.
To automatically learn and detect certain situa-
tions, we follow the pipeline of situation learning
which is segmented in the four computing steps, time
series extraction, time lag calculation, BRS calcula-
tion and the optional step of graph visualization. In
the first step of the pipeline, it is necessary to create a
simulation or record all involved sensors in a situation
of interest (or more than one) and extract the time se-
ries as set T = {T
0
,T
1
,...T
n
}, as depicted in Figure 3.
After the extraction step, we compute causal rules
of all subsets of set T , with two differing elements
{T
i
,T
j
}, to determine the optimal time lag
6
` of the
4
Time series, which are only represented by binary val-
ues, have been ignored for simplification in the proposed
method.
5
Noise detection is done manually.
6
To simplify matters, it is assumed that the requested sit-
uation corresponds to the total length of the recorded trace.
T
3
T
2
T
1
T
n
Time
Value
IVN or simulation
Figure 3: Time series extraction.
subsets. This second step of the pipeline is depicted
in Figure 4. We use a predefined α
1
= −1 and β = −1
in order to ensure a BRS is calculated per compared
time series.
T
4
T
3
T
1
T
n
Time
Value
Time
Value
T
2
Compute BRS
Figure 4: Time lag calculation.
In the third step of the pipeline, we first seg-
ment the time series T
i
into small sub windows of
equal length. The sub windows overlap each other
(sw
0
,..., sw
n
), like depicted in Figure 5. The time se-
ries T
j
is also segmented in sub windows starting with
an offset of time lag `, as calculated in the second step
of the pipeline. We now calculate the strongest BRS
with the longest sub sequence for all different sets of
T
i
and T
j
.
T
i
T
j
Time
Value
Time
Value
time lag ℓ
sw
0
sw
1
sw
2
sw
0
sw
1
sw
n
sw
n
Compute BRS
Figure 5: BRS calculation.
Therefore, we first compute a causal rule for
sw
k
(T
i
) and sw
k
(T
j
). If k = 0 and we get a BRS
(α ≥ α
1
and T OR ≥ β), we increment k and go on
with the next sub window. Else if k > 0 and we get a
BRS for sw
k
(T
i
) and sw
k
(T
j
), we merge the actual sub
Automatic Fault Detection using Cause and Effect Rules for In-vehicle Networks
541

window sw
k
with the pre sub window sw
k−1
and cal-
culate a new BRS. We increment k and proceed with
the next sub window. The termination criteria for the
actual calculation are α < α
1
, T OR < β or the last sub
window of T
j
is reached. We get the strongest BRS
with the longest sub sequence for the sets T
i
and T
j
.
We perform this for all sets, until we have calculated
all BRSs
7
.
The fourth step of the pipeline is the optional vi-
sualization as a relationship graph. An example of a
relationship graph is depicted in Figure 6.
T
1
T
2
T
3
T
n
T
4
T
5
T
7
Figure 6: Example of relationship graph.
To detect the learned situation in a recorded driv-
ing behavior, we use the calculated causal relation-
ships with the defined time lag ` and sub windows
like in step three of the pipeline of situation learning.
The difference is, that we compare each found BRS
with the BRSs of the learning phase. If it matches a
BRS of the learning phase, we try to find the other
corresponding BRSs with the involved T
i
. If we get
the whole set of BRSs, we found the exact situation,
if it differs in small subset, this subset has to be re-
viewed for fault detection. Depending on the record-
ing, we start over with the next sub window, to find
other situations of the same type.
The proposed solution is still work in progress.
In the current state of research we set values man-
ually, like the minimum slope δ, α
1
, β and the sub
window size used in the pipeline. The next step is to
improve the calculation steps of the pipeline, to make
the method more robust and more precise. Therefore
we can label the BRSs found within the positive situ-
ations recorded and use them as feature for a machine
learning algorithm (i.e., a support vector machine),
to identify the situations in new recordings, with no
knowledge about the content.
5.4 Fault Detection
The situation recognition is carried out as pre-
processing so that only the situations itself can be an-
7
The method will be adjusted in order to make it more
robust.
alyzed for the fault detection.
Faults that affect the causal relationships can be
detected by simply comparing the causal relationship
graphs of positive and negative cases. In the case a
BRS is missing between two time series, it can be
the case if an ECU goes into a fault state and trans-
mits only a fixed value or a short circut has occurred.
The causal relationship graph can be used by automo-
tive engineers to identify all affected relationships and
sensors, if a fault propagates through the IVN.
To detect an error that manifests itself in a tem-
poral offset, like a mechanical wear, we can use the
aforementioned BRSs with the new values of the µ
and σ as features for a supervised machine learning
algorithm. Therefore it is necessary to record positive
and negative examples in order to train the algorithm
and find faults or slightly differing values over time, in
new recordings. With predictive modeling, we could
predict in the future.
There are also algorithms that detect unusual be-
havior (Shirahama et al., 2016). The proposed method
could be used as a pre-processing step in order to re-
duce the search space for such algorithms in the future
work.
6 EXPERIMENTAL RESULTS
In Section 5, we present the proposed situation detec-
tion method based on the creation of adjusted cause
and effect rules and their visualization. We also dis-
cussed detectable faults and the current limits of the
proposed method. The effectiveness of the method is
reviewed in this section using simulated and real data
of a vehicles braking situations.
6.1 Simulated Braking Situations
To evaluate the proposed method, an idealized decel-
eration is simulated. The required formulas are taken
from (Mitschke and Wallentowitz, 2014). It consists
of three different time series: velocity v, deceleration
a and distance traveled s. The simulation can be ini-
tialized with the threshold time and the friction coeffi-
cient. The range for positive or negative samples can
be taken from Table 1 which is a collection from (Bur-
ckhardt, 1991; Gomeringer et al., 2014). The situa-
tion detection described in Section 5 is not used be-
cause the whole simulation models only the situation
to be detected.
In the first step the algorithm for computing BRSs
is used to determine the relationships between the
three time series. The resulting graph is shown in Fig-
ure 7.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
542
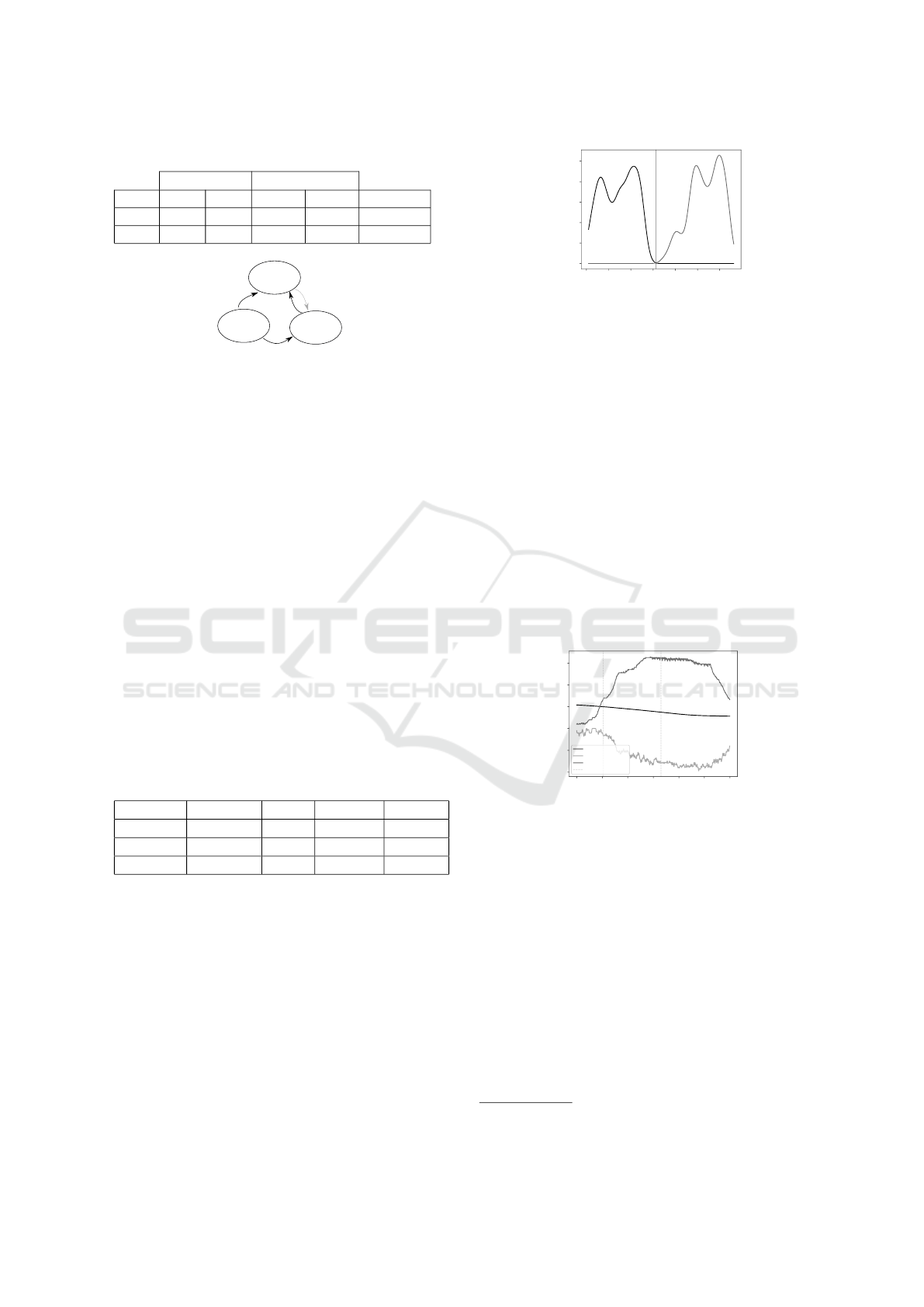
Table 1: Parameter of braking situation.
t
s
[s] a
max
[m/s
2
]
case min max min max V
A
[m/s]
pos. 0.14 0.18 0.76g 0.8g 13.88
neg. 0.19 0.30 0.75g 0.66g 13.88
s
a
v
Figure 7: Relationship graph for simulated brake situation.
The BRS calculated between s and v is grayed out,
because the distance can not be the cause of the veloc-
ity, thus expert knowledge is used to identify and dis-
card it. If we generate a negative brake situation, the
BRS sets are the same as in the positive case. Thus
we take µ and σ into account to identify this.
In the experiment we generate 200 positive and
200 negative braking situations by randomly assign-
ing equally distributed values from Table 1. For each
braking situation the three time series are generated.
We cut all of them at the minimum threshold time
of 0.14s, because else it is possible to distinguish
between the positive and negative situations by just
counting the data points of the time series.
Then for each braking situation the BRSs men-
tioned above are computed and labeled. For each type
of BRS a feature matrix is compiled, consisting of the
µ and σ as input for a machine learning model. In this
example a decision tree algorithm is used. The results
are the same for all BSRs and are cross validated (3-
Folds). This is shown in Table 2.
Table 2: Metrics.
class precision recall f1-score support
neg 1.00 1.00 1.00 200
pos 1.00 1.00 1.00 200
avg/total 1.00 1.00 1.00 400
The results are questioned, because 100% accu-
racy is reached and could be the cause of overfitting.
But if one examines the decision tree, it has only a
height of one. This means only the feature µ is used
to make the split between the cases. If we compute a
probability density function (PDF) of µ in the positive
and negative situations, we can separate very clearly
between the situations, shown in Figure 8. Therefore,
we can validate the result of the decision tree.
We conclude, in the simulated situation we get
very good results. This has to be validated with real
IVN data.
Probability
µ(a)
pos neg
-55 -50 -45 -35
-30
-25-40
0.00
0.20
0.40
0.60
0.80
1.00
Figure 8: Probability density function of µ(a).
6.2 Real Braking Situations from IVN
Sensor Data
The next step we evaluate the situation detection with
real IVN data of a Ford Fiesta MK-II. We recorded
CAN bus data for a test drive which contains several
braking situations to automatically detect only the sit-
uations braking from 20km/h down to 15k m/h. In
the recorded trace there are only positive examples of
a brake without mechanical wear.
With expert knowledge we modeled a sub graph
of involved time series during a brake situation. It
contains the verified relationships of the deceleration
sensor a, the velocity v and the brake pedal position b:
BRS
b→a
, BRS
b→v
and BRS
a→v
. An unfiltered excerpt
of the time series is shown in Figure 9.
Value
Time [ms]
438000 440000 442000 444000
-40
-20
0
20
40
60
20 -> 15 km/h
b
a
v
Figure 9: IVN brake situation (Ford Fiesta MK-II).
The pre-processing steps described in section 5
are applied on the time series to eliminate noise and
re-sample them and the optimal time lag is deter-
mined by the proposed method. Next we applied
the verified relationships to the method in order to
find braking situations in a trace of several minutes.
Through empirical tests a sub window size of 500ms
equivalent to 50 data points and a overlap of 25 data
points is used. The α-value is set to 90%. The result
is shown in Figure 10, where the brake situations are
marked between dashed lines. The proposed method
found every brake situation in the trace
8
.
We also modeled good and bad brake examples
using the IVN sensor data, depicted in the left-hand
8
Is verified by manual situation detection.
Automatic Fault Detection using Cause and Effect Rules for In-vehicle Networks
543

b
v
a
Values normalized
Time[ms]
48000 52000 56000 60000
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.1
Figure 10: Found IVN brake situations.
side of Figure 11
9
and got the result the PDF of µ(v)
on the right-hand side of Figure 11. The decision tree
has, like in the simulation, a depth of one. So the
PDFs were examined and result that even in the real
IVN sensor data, there are features with optimal se-
lectivity, like the µ(v).
Velocity in km/h
Pos
Neg
Normalized time
0.5 0.6 0.7 0.8 0.9 1.0
15
16
17
18
19
20
Pos Neg
0.0
0.2
0.4
0.6
0.8
1.0
Probability
1.2
µ(v)
-5.5 -4.5 -3.5 -2.5
Figure 11: Modeled brake examples and resulting PDF.
7 CONCLUSIONS
The experimental results show that the adjusted
method of (Hira and Deshpande, 2016) performs very
well with a simulated situation and situations derived
from real traces of IVN sensor data, shown in Sec-
tion 6. It is able to learn defined situations and find
them in unknown time series.
The automatic fault detection, in the case of me-
chanical wear, is verified with a positive result in a
simulated situation as well as in real traces of IVN
sensor data. Therefore we used positive examples
from test rides and modeled negative examples.
According to the results, the method of modeling
causal relationships between time series can be ap-
plied to sensor signals of IVNs very well. It has to be
adjusted in the future work in order to make it more
robust and decrease the cost in means of computation
time, by applying new techniques like machine learn-
ing algorithms in intermediate steps of the method.
All previously manually defined variables have to be
decided automatically.
9
Samples are divided into small sub windows in order to
get more training data.
REFERENCES
Alippi, C., Roveri, M., and Trov, F. (2014). Learning causal
dependencies to detect and diagnose faults in sensor
networks. In 2014 IEEE Symposium on Intelligent
Embedded Systems (IES), pages 34–41.
Burckhardt, M. (1991). Fahrwerkstechnik: Bremsdynamik
und Pkw-Bremsanlagen. Vogel-Verlag.
Deb, A. K., Kordes, A., and Vermeulen, H. G. H. (2013).
Flexray network runtime error detection and contain-
ment. US Patent 20140047282A1.
Gomeringer, R., Heinzler, M., Kilgus, R., Menges, V.,
N
¨
aher, F., Oesterle, S., Scholer, C., Stephan, A., and
Wieneke, F. (2014). Tabellenbuch Metall. Europa-
Fachbuchreihe f
¨
ur Metallberufe. Europa-Lehrmittel.
Hira, S. and Deshpande, P. S. (2016). Mining precise cause
and effect rules in large time series data of socio-
economic indicators. SpringerPlus, 5(1):1625.
Kerschen, G., Boe, P. D., Golinval, J.-C., and Worden, K.
(2005). Sensor validation using principal component
analysis. Smart Materials and Structures, 14(1):36.
Klimkowski, K. (2016). An artificial neural networks ap-
proach to stator current sensor faults detection for
dtc-svm structure. Power Electronics and Drives, 1
(36)(1).
Kordes, A., Hozhabrpour, H., Wism
¨
uller, R., and Grze-
gorzek, M. (2018). Vehicle-independent interpretation
of sensor signals without a-priori knowledge of their
semantics. In press, VDE GMM-Fachtagung AmE Au-
tomotive meets Electronics, Dortmund, Germany.
Kordes, A., Vermeulen, B., Deb, A., and Wahl, M. (2014).
Startup error detection and containment to improve
the robustness of hybrid flexray networks. In Proceed-
ings of the conference on Design, Automation & Test
in Europe, page 5. European Design and Automation
Association.
Korte, M., Holzmann, F., Kaiser, G., Scheuch, V., and Roth,
H. (2012). Design of a Robust Plausibility Check for
an Adaptive Vehicle Observer in an Electric Vehicle,
pages 109–119. Springer Berlin Heidelberg, Berlin,
Heidelberg.
Mitschke, M. and Wallentowitz, H. (2014). Dynamik der
Kraftfahrzeuge. Springer Vieweg.
Mosteller, F. (1968). Association and estimation in con-
tingency tables. Journal of the American Statistical
Association, 63(321):1–28.
Rosich, A., Frisk, E., Aslund, J., Sarrate, R., and Nejjari, F.
(2012). Fault diagnosis based on causal computations.
IEEE Transactions on Systems, Man, and Cybernetics
- Part A: Systems and Humans, 42(2):371–381.
Shirahama, K., K
¨
oping, L., and Grzegorzek, M. (2016).
Codebook approach for sensor-based human activity
recognition. In Proceedings of the 2016 ACM Interna-
tional Joint Conference on Pervasive and Ubiquitous
Computing: Adjunct. ACM.
Tucker, A. and Liu, X. (2004). A bayesian network ap-
proach to explaining time series with changing struc-
ture. Intell. Data Anal., 8(5):469–480.
Xu, X., Hines, J. W., and Uhrig, R. E. (1999). Sensor vali-
dation and fault detection using neural networks.
VEHITS 2018 - 4th International Conference on Vehicle Technology and Intelligent Transport Systems
544
