
Optimized Feature Selection for Initial Launch in Dynamic Software
Product Lines
Ismayle de Sousa Santos
1
, Evilasio Costa Junior
1,∗
, Rossana Maria de Castro Andrade
1,†
,
Pedro de Alc
ˆ
antara dos Santos Neto
2,‡
, Leonardo Sampaio Rocha
3,§
, Claudia Maria Lima Werner
4,¶
and Jerffeson Texeira de Souza
3
1
Department of Computer Science, Federal University of Cear
´
a, Fortaleza, Brazil
2
Department of Computer Science, Federal University of Piau
´
ı, Teresina, Brazil
3
Science and Tecnology Center, State University of Cear
´
a, Fortaleza, Brazil
4
Computer Systems Engineering Program, Federal University of Rio de Janeiro, Rio de Janeiro, Brazil
werner@cos.ufrj.br
Keywords:
Software Product Line, Dynamic Software Product Line, Graph, Multi-objective Optimization.
Abstract:
A Dynamic Software Product Line (DSPL) allows the generation of products that can adapt dynamically
according to changes in requirements or environment at runtime. This runtime adaptation is often made by the
activation and deactivation of features, introducing a cost (e.g., an overhead regarding resource consumption).
To reduce this cost, a solution is the partial product configuration at the static binding time. Thus, in DSPLs,
one challenge is the feature selection to define which features should be bound permanently before the initial
launch and which features should be bound at runtime. In this paper, we address this challenge presenting a
graph model formulation to the feature selection problem for the initial launch in DSPLs that considers both
static and dynamic binding. This model allows the application of efficient optimization algorithms to solve
the problem. We also present a proof of concept showing that the model can be used to generate optimized
solutions to the feature selection problem for initial launch in DSPLs.
1 INTRODUCTION
A Software Product Line (SPL) is a reuse-oriented
approach that aims the development of products by
reusing common artifacts (Eriksson and Hagglunds,
2003). Despite the benefits of an SPL, it cannot
handle the dynamic variations (at runtime) in user
requirements and product environment (Hallsteinsen
et al., 2008). To address this gap, Dynamic Software
Product Lines (DSPLs) emerged as an extension of
the concept of conventional SPLs, enabling the gene-
ration of software variants at runtime (Bencomo et al.,
2012).
In order to support dynamic variability, a DSPL
has multiple and dynamic binding (Capilla et al.,
2014). The binding time is the time at which one
∗
PhD scholarship (MDCC/DC/UFC), sponsored by CAPES
†
Researcher scholarship - DT Level 2, sponsored by CNPq
‡
Researcher scholarship - DT Level 2, sponsored by CNPq
§
Researcher scholarship - PQ Level 2, sponsored by CNPq
¶
Researcher scholarship - PQ Level 1, sponsored by CNPq
decides to include or exclude a feature from a pro-
duct (Chakravarthy et al., 2008). According to Ro-
senm
¨
uller et al. (Rosenm
¨
uller et al., 2011), the static
binding occurs when a feature is bound in a program
before load time (e.g., at compilation time), whereas
the dynamic binding occurs at load time or after loa-
ding a program. In traditional SPL engineering, featu-
res are bound only statically. Thus, once the product
is generated from the SPL, it cannot longer be chan-
ged at runtime (Hallsteinsen et al., 2008). DSPLs, ho-
wever, can combine static and dynamic binding and,
therefore, their features can be bound several times
and at different time periods (Capilla et al., 2014).
Thus, DSPLs can produce software capable of
adapting to user needs and evolving resource con-
straints (Hallsteinsen et al., 2008). It is worth no-
ting that the static binding provides fine-grained cu-
stomization without any influence on the resource
consumption, but it can result in a functional over-
head when features included in the product are not
used (Rosenm
¨
uller et al., 2009). Dynamic binding,
in turn, provides more adaptability by dynamically
de Sousa Santos, I., Costa Junior, E., Andrade, R., de Alcântara dos Santos Neto, P., Sampaio Rocha, L., Maria Lima Werner, C. and Texeira de Souza, J.
Optimized Feature Selection for Initial Launch in Dynamic Software Product Lines.
DOI: 10.5220/0006778001450156
In Proceedings of the 20th International Conference on Enterprise Information Systems (ICEIS 2018), pages 145-156
ISBN: 978-989-758-298-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
145
loading features when required, but usually, intro-
duces an overhead regarding resource consumption
and performance, and increases the execution time
(Rosenm
¨
uller et al., 2011)(Rosenm
¨
uller et al., 2009).
Therefore, one partial DSPL product configuration,
binding some of the variation points at design time,
can be done before the initial launch for dealing with
the trade-off between the advantages and disadvanta-
ges of each binding time.
In this scenario, the product configuration pro-
blem is how to decide which features should be bound
only statically, before initial launch, and which featu-
res should be bound dynamically.
In a small SPL, it is feasible to use exact techni-
ques to solve the product configuration problem based
on feature attributes (Olaechea et al., 2014). These at-
tributes specify extra-functional information such as
speed or RAM required to support the feature (Be-
navides et al., 2010). Meanwhile, in a medium or
large SPL, this solution can take a prohibitive time.
Then, the use of Search Based Software Engineer-
ing (SBSE), which refers to the use of computatio-
nal search as a mean of optimizing software engineer-
ing problems (Harman et al., 2014), can be neces-
sary to obtain an optimum solution in an acceptable
time. In fact, we agree with Lopez-Herrejon et al.
(Lopez-Herrejon et al., 2015) that “the product con-
figuration naturally lends itself to the application of
SBSE techniques because of the vast number of com-
binations that SPL requirements can typically have”.
After an analysis of the literature (see Section 6),
we observed that the existing approaches did not ad-
dress the feature selection problem in DSPLs, before
the initial launch. Addressing this gap, this paper pro-
poses a multi-objective approach based on a graph
model for the feature model rules verification. We
decide to use a graph approach, because it can facili-
tate the representation and understanding of the fea-
ture model rules, besides allowing the use of different
optimization algorithms to solve the feature selection
problem. Moreover, this approach is easily imple-
mentable, once that graphs are well-known structu-
res. There is already some SBSE approaches that mo-
del the feature selection problem using graphs (Wang
and Peng, 2014), but they are focused in SPL.
The main contributions of this paper are as fol-
lows:
• we present a graph model created from the fea-
tures model considering both static and dynamic
binding times. Any optimization algorithm can
be used with the proposed model to solve the fe-
ature selection problem for the initial launch in
dynamic software product lines; and
• we introduce a multi-objective generic formula-
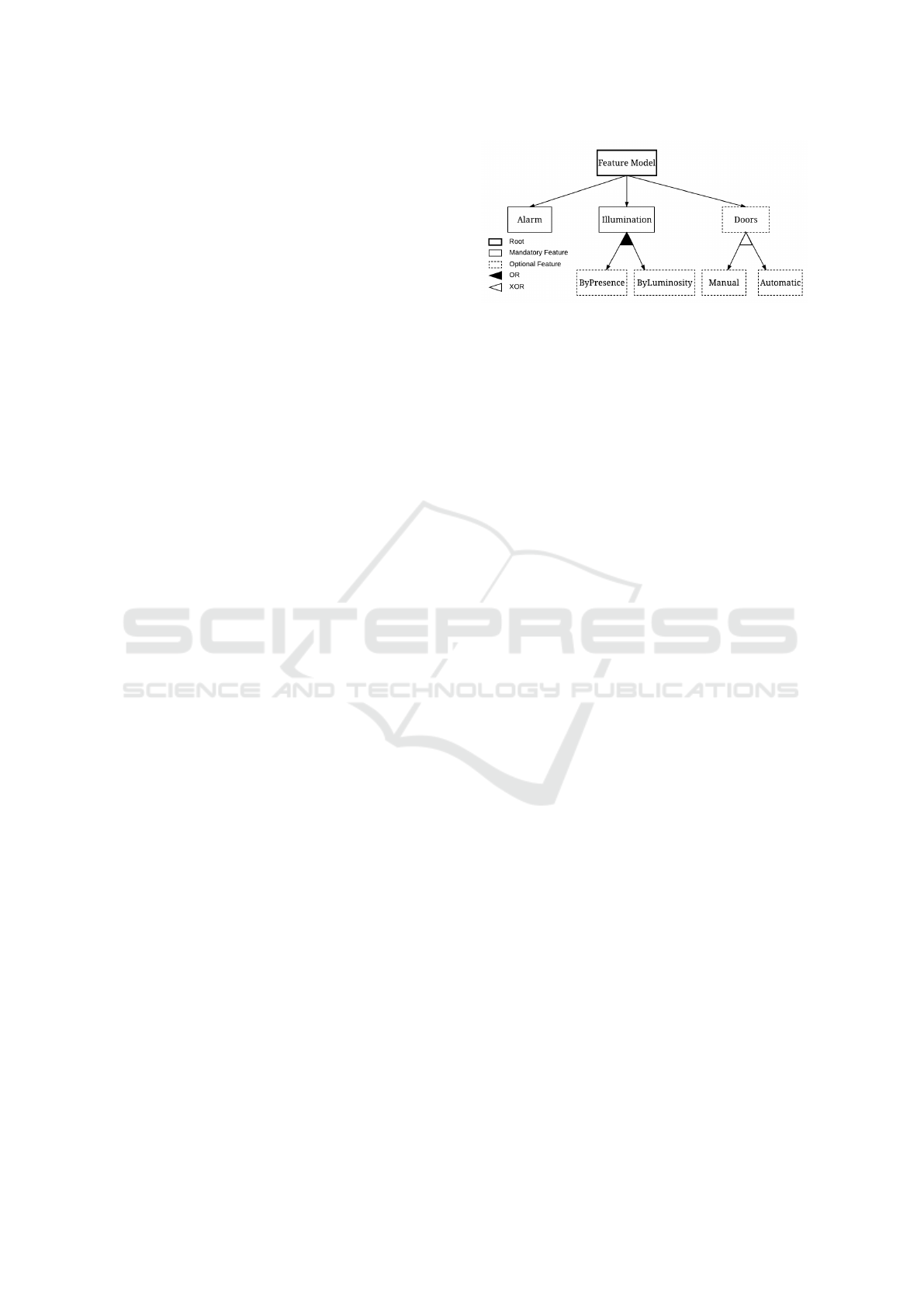
Figure 1: An example of SPL feature model.
tion for the feature selection problem in a DSPL;
and
• we present a proof of concept performed to as-
sess the feasibility of using our proposal to ge-
nerate optimum solutions to the feature selection
problem for initial launch in DSPLs;
2 FEATURE MODEL
Features are attributes of a system that directly affect
end-users (Kang et al., 1990). In a feature model, the
features are presented in a hierarchical way, and the
basic rules are: (i) the root feature is included in all
products; (ii) a child feature can only be included in
a product if its parent feature is included; and (iii) a
variation point is a point in the feature model where a
choice needs to be made. Figure 1 shows an example
of SPL feature model, where the features Illumination
and Doors are variation points.
Usually, a feature model allows the following re-
lationships among features (Benavides et al., 2010):
(i) Mandatory, a child feature has a mandatory re-
lationship with its parent when the child is ad-
ded in all products in which its parent feature
appears;
(ii) Optional, a child feature has an optional relati-
onship with its parent when the child can be op-
tionally added in all products in which its parent
feature appears;
(iii) Xor, a set of child features has a Xor-relationship
with its parent when only one child feature can
be selected when its parent feature appears; and
(iv) Or, a set of child features has an Or-relationship
with its parent when one or more of them can
be included in the products in which its parent
feature appears.
A feature model can also contain cross-tree con-
straints specified by require and exclude relationships
between features (Benavides et al., 2010). In an SPL,
if a feature A excludes a feature B, then both features
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
146

cannot be included in the same product. If a feature
A requires a feature B, then there is a dependence re-
lationship where if feature A is included in a product,
then feature B is also included.
It is worth noting that in a DSPL, a variation point
can be bind at runtime by (de)activating the features.
In this scenario, if a feature A excludes a feature B,
then these features cannot be active in the product at
the same time. Also, if a feature A requires a feature
B, then the activation of the feature A enforce the acti-
vation of the feature B.
Futhermore, some feature model notations, as the
Odyssey-FEX (Fernandes et al., 2011), consider that
a model can have feature groups. In an SPL, feature
groups are variation points, where there are a mini-
mum and a maximum number of features that must
be added to the product. In a DSPL, feature groups
specify the minimum and maximum numbers of fea-
tures in the group that can be active in the product at
the same time.
Lastly, an SPL/DSPL product is a selection of fe-
atures of the feature model. To be a valid product
configuration, this selection should satisfy all feature
model rules and relationships.
3 FEATURE SELECTION
PROBLEM IN DSPL
According to (Capilla et al., 2014), a DSPL has the
following properties:
• P1: Runtime Variability Support. A DSPL must
support the activation and deactivation of features
and changes in the structural variability that can
be managed at runtime;
• P2: Multiple and Dynamic Binding. In a DSPL,
features can be bound several times and at diffe-
rent time periods (e.g., from deployment to run-
time); and
• P3: Context-Awareness. DSPLs must handle
context-aware properties that are used as input
data to change the values of system variants dyn-
amically and to select new system options depen-
ding on the conditions of the environment.
In the next paragraphs, we depict the relationship
between the DSPL properties presented by Capilla et
al. (Capilla et al., 2014) with the feature selection
problem for the initial launch.
Because of property P1, to maximize the dyna-
micity (reconfiguration possibilities at runtime) is an
important objective that should be considered in the
DSPL feature selection problem. The DSPL dynami-
city is correlated with the number of features that can
be activated or deactivated at runtime. Thus, this op-
timization objective is necessary due to the goal of a
DSPL that is to generate products, which can be dy-
namically configured according to changes in the re-
quirements or environment.
As a consequence of property P2, the binding type
(static or dynamic) is an essential attribute that has
to be considered in the DSPL feature selection pro-
blem for the initial launch. The more features are left
to dynamic binding, the more the product is adapta-
ble at runtime. On the other hand, the more features
are bound dynamically, the more the product will be
complex. The complexity occurs because the dyna-
micity requires a binder for selecting the values of
the variants at runtime (Capilla et al., 2014). Besi-
des, the dynamic binding usually has a cost of perfor-
mance and memory consumption (Rosenm
¨
uller et al.,
2011). Therefore, the static binding has an important
role in the DSPL scenario to derive a configuration for
the initial launch following the resource constraints
related to the reconfiguration process. This binding
reduces the effort for computing a configuration of
a DSPL by minimizing the number of dynamically
bound modules. Some authors call a DSPL that deals
with both time periods as Hybrid DSPL (Bencomo
et al., 2012), where some variation points are bound
only statically, and others are left open for rebinding
at runtime.
The property P3 affects the features activation and
deactivation at runtime. For this reason, this property
is not addressed in the feature selection problem for
the initial launch, which is discussed in this paper.
3.1 Motivating Example
As a motivating example consider the problem of fea-
ture selection in the DSPL called Mobile Guide (Mar-
inho et al., 2013)
6
, which is related to the develop-
ment of mobile and context-aware tour guides. Figure
2 presents a small part of the Mobile Guide feature
model in the Odyssey-FEX notation (Fernandes et al.,
2011). One of its products is the GREat Tour (Mar-
inho et al., 2013) that is a tour guide in the GREat
7
laboratory at the Federal University of Cear
´
a.
In Figure 2, we have one variation point (Show
Documents) that can be bound at runtime. This va-
riation point is related to the document types (text,
image, and video) shown to the visitor. The type of
document is available according to the battery charge
level. If the charge level is low, then only texts are
available. If the charge level is medium, then the visi-
tor can access texts and images. Lastly, if the battery
6
http://mobiline.great.ufc.br/index.php
7
http://great.ufc.br
Optimized Feature Selection for Initial Launch in Dynamic Software Product Lines
147
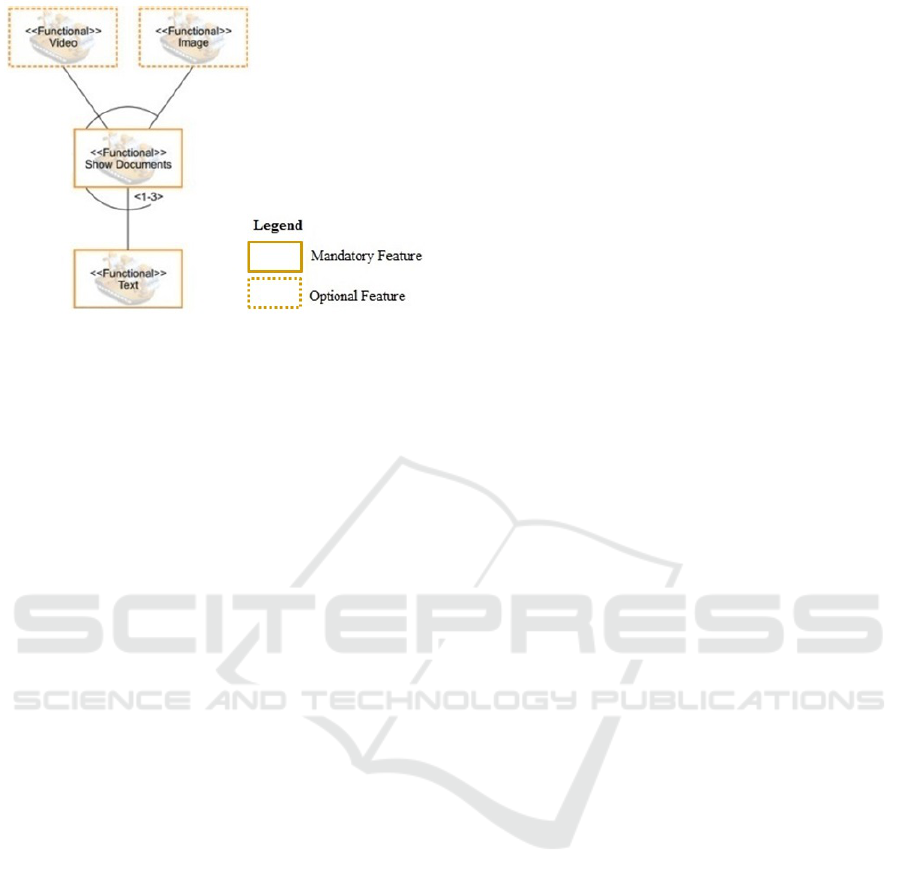
Figure 2: A variation point of the Mobile Guide feature mo-
del (Marinho et al., 2013).
charge level is high, all document types are available.
Low, medium and high values are defined empirically
before the application is deployed.
As “Text” is a mandatory feature, it has to be al-
ways active. However, as regards to the other two
features of the variation point Show Documents, the
following question arises in the product configuration
for the initial launch: Should we bind the features
“Video” and “Image” permanently at static binding
time or should we leave them to be bound dynami-
cally (at runtime) according to the changes in the bat-
tery charge level?. Thus, in our example, we have
four options: (i) only static binding for both features;
(ii) dynamic binding for both features; (iii) only static
binding for the feature “Video” and dynamic binding
for the feature “Image”; and (iv) only static binding
for the feature “Image” and dynamic binding for the
feature “Video”.
By applying only the static binding, we affect the
dynamicity of the product, but this can be necessary
to satisfy the resource constraints (e.g., time spent in
the activation/deactivation of features). Then, to ans-
wer the question aforementioned, we need feature at-
tributes related to the binding time to decide the best
option to satisfy both the customer and the resource
constraints. Depending on the attributes values, for a
given customer, for example, it can be more interes-
ting to remove the feature “Video” permanently (sta-
tic binding) and leave only the feature “Image” to be
bound at runtime (dynamic binding).
Therefore, the problem is to derive a partial pro-
duct configuration from a DSPL, with the maximum
adaptability (the main goal of a DSPL), maximum va-
lue to the customer (to satisfy him/her), and minimum
cost (to optimize the resources), respecting the feature
model rules (to be a valid product).
4 A GRAPH MODEL
FORMULATION FOR FEATURE
SELECTION IN DSPL
In this section, we describe our graph model, the pro-
blem objectives of our formulation and the feasibility
rules.
4.1 A Graph Model
In our formulation, from the feature model, we gene-
rate a directed graph for the verification of the rules of
this model and the identification of feasible solutions
to the feature selection problem in a DSPL.
The graph G = (V, E) represents the features and
the relationships between features defined by feature
model rules. Each vertex x ∈ V corresponds to a fe-
ature of the model. The vertices are divided into two
sets that indicate if the feature is optional or manda-
tory.
V = V
m
∪V
o
where
V m =
x ∈ V
m
|x is a mandatory feature}
Vo =
x ∈ V
o
|x is a optional feature}
In order to define the graph edges, three concepts
are used: feature dependency, feature proximity, and
statically exclusion. When a feature x depends on a
feature y, it means that the feature x requires y. The
proximity of a feature x is the set of features so that
x requires at least one of the features in its proximity.
If a feature x excludes statically a feature y, then both
x and y cannot be activated simultaneously in the pro-
duct.
Thus, the set of edges E is divided into three sub-
sets, where each subset denotes an edge type.
E = E
d
∪ Ev ∪ E
e
where
Ed =
xy ∈ E
d
|x depends on y}
Ev =
xy ∈ E
v
|y belongs to the proximity of x}
Ee =
xy ∈ E
e
|x excludes statically y}
Table 1 shows how the vertices and edges are re-
presented in the graph. Mandatory features (set V
m
)
generate filled vertices. Optional features (set V
o
) ge-
nerate unfilled vertices. Edges from the set E
d
are
represented by continuous arcs. Edges from the set
E
v
are represented by dotted arcs. Lastly, edges from
the set E
e
are represented by dashed arcs.
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
148
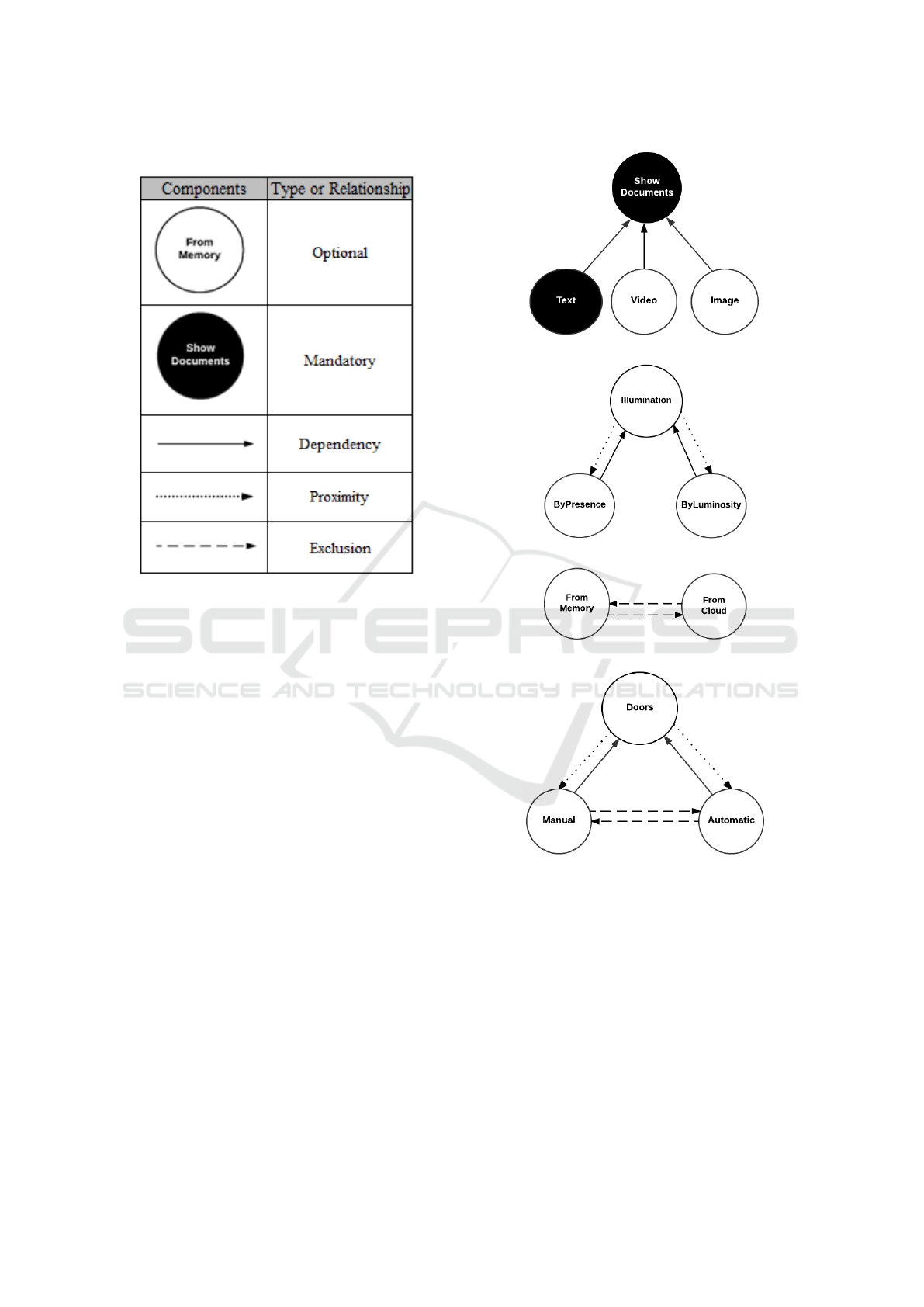
Table 1: Graph Components.
A feature model may have also a set of fea-
ture groups (FG). Each group g has a minimum
(minFG(g)) and maximum (maxFG(g)) quantity of
features that may be active at the same time in the pro-
duct. In the graph, there are no specific components
to represent the feature groups, but they can be added
during the implementation of the graph data structure,
as exemplified in our proof of concept (see Section 5).
Figure 3 shows the relationships among the fea-
tures in the graph. Figure 3.a shows an example of
father and son relationship. In this figure, the features
“Text”, “Video” and “Image” can only be selected, if
“Show Documents” was selected. In Figure 3.b, an
example of require relationship with the operator Or
is presented. In this case, if the feature “Illumination”
is selected, it requires that at least one feature from
the set [“ByPresence”, “ByLuminosity”] is selected.
Figure 3.c shows an exclude relationship, where
if a feature in this relationship is activated, the other
cannot be activated at the same time. Then, if a fe-
ature is related to others by dashed edges, and this
feature is selected for the product as static, the others
cannot be selected to the product. Lastly, Figure 3.d
shows a require relationship using the operator Xor.
In the latter, if the feature “Doors” is selected, it re-
quires that at least one among the features “Manual”
and “Automatic” is selected. Moreover, if a feature
among the features “Manual” and “Automatic” is se-
lected at static time to be always active, the other fea-
ture cannot be selected.
(a) father and son dependence
(b) require with the operator Or
(c) exclude
(d) require with the operator Xor
Figure 3: Feature model relationships represented in the
graph.
4.2 Problem Objectives
In our problem formulation, presented bellow, a so-
lution F
p
is composed by a subset of features of the
feature model selected for the product. The dynami-
city of the DSPL products can be improved by maxi-
mizing the number of features with dynamic binding
(1). Moreover, to better satisfy the user, we should
maximize the value (value( f
n
)) (2) of the features se-
lected ( f
n
), which can be measured through feature
Optimized Feature Selection for Initial Launch in Dynamic Software Product Lines
149

attributes like utility or quality attributes (even those
related to the context awareness). Despite limiting the
feasible solutions to a resource constraint, we suggest
to use an objective to minimize the cost (cost( f
n
)) of
the features (3). This cost can be, for example, regar-
ding performance, resource usage, or monetary value.
Thus, the results of the optimization process with a
multi-objective algorithm show a set of options with
different costs that the customer may choose. As we
discussed in the previous sections, since the DSPL fe-
atures can be bound statically or dynamically, we con-
sider two kinds of costs: i) CostD, which is the feature
cost when it is left to the dynamic bind; and ii) CostE,
which is the feature cost when it is bound only stati-
cally.
Maximize
∑
f
n
∈F
p
dynamicity( f
n
) (1)
Maximize
∑
f
n
∈F
p
value( f
n
) (2)
Minimize
∑
f
n
∈F
p
cost( f
n
) (3)
where
dynamicity( f
n
) =
1, if f
n
is selected with
bound dynamically
0, if f
n
is selected with
bound only statically
cost( f
n
) =
costD, if dynamicity( f
n
) = 1
costE, if dynamicity( f
n
) = 0
4.3 Feasibility Rules
In our formulation, a solution is feasible only if it re-
spects the following constraint:
brokenFeasibilityRules(F
p
) = 0 (4)
It means that all feasibility rules, i.e., the feature
model rules (see Section 4.3.2), should be satisfied by
the solution.
4.3.1 Vertex Value
Each vertex x, related to a feature, has an integer s(x),
that indicates the state of the feature. The possible
values to s(x) are:
s(x) =
0, if feature x was not selected
1, if feature x was selected as static
2, if feature x was selected as dynamic
We can also define num
1
(g) and num
2
(g) as the
number of features in a group g selected as static
and dynamic, respectively. Then, num
1
(g) =|{x ∈ g |
s(x) = 1}| and num
2
(g) =|{x ∈ g | s(x) = 2}|.
4.3.2 Rules
A solution is feasible if the following rules are satis-
fied:
1. If x ∈ V
m
, then s(x) = 1
• If the feature is mandatory, it must be selected
at static time;
2. If x,y ∈ V and xy ∈ E
d
, then if s(x) 6= 0, then
s(y) 6= 0
• If a feature x depends on a feature y, feature x
can just be selected if y is also selected;
3. If x ∈ V and Y ⊂ V, such that Y = {y ∈ Y | y 6= x
and xy ∈ E
v
}, then if s(x) 6= 0, then
∑
y∈Y
s(y) > 0
• If a set of features Y belongs to the proximity of
a feature x, then feature x can only be selected,
if at least one of the features in set Y is also
selected;
4. If x, y ∈ V and xy ∈ Ee, then if s(x) = 1, then
s(y) = 0
• If a feature x excludes a feature y, and the fea-
ture x is selected as static, then feature y cannot
be selected;
5. ∀g ∈ FG,
∑
num
1
(g) ≤ maxFG(g)
• The solution cannot select more static features
belonging to the same group than the maximum
number of active features allowed at the same
time in that group;
6. ∀g ∈ FG,
∑
num
1
(g)) +
∑
num
2
(g) ≥ minFG(g)
• The number of selected features belonging to
a group, independently of if static or dynamic,
must be greater than or equal to the minimum
number of features that may be active at the
same time in that feature group;
7.
∑
f
n
∈F
p
cost( f
n
) ≤ maxCost
• The cost of the solution should be less than
maxCost, which is a maximum cost that the cu-
stomer is willing to spend;
Rule 1 is used to check if the feature is mandatory.
Rules 2 to 4 validate the relations depicted in Figure 3.
Rules 5 and 6 are used to validate the feature groups
rules. Lastly, rule 7 limits the cost of the product.
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
150
5 PROOF OF CONCEPT
A proof of concept was performed to verify the fea-
sibility of using the graph model and the formulation
proposed for solving the feature selection problem in
a DSPL. In our proof of concept, we used three fe-
ature models: (i) Mobiline, discussed in Section 3.1;
(ii) a DSPL for smart homes, called SmartHome (Car-
valho et al., 2017); and (iii) one artificially generated
feature model.
We used the framework JMetal (Durillo and Ne-
bro, 2011) to run the proof of concept with the algo-
rithm NSGAII (Deb et al., 2002a) and IBEA (Sayyad
et al., 2013b). These algorithms were selected, be-
cause they are used in several related work that deal
with feature selection (Pascual et al., 2013a)(Sayyad
et al., 2013a).
5.1 Population Representation
We represent a DSPL feature model with “n” features
through two strings S1 and S2 of “n” binary digits. In
S1, the value “1” for a digit indicates that the feature
is selected (“0” for unselected feature). In S2, the va-
lue “1” for a digit indicates that the feature should be
bound dynamically, while “0” means that the feature
should be bound only statically. For example, Table
2 shows the representation of two products with both
strings S1 and S2. In Product 1, the feature “Video”
was not selected (its corresponding bit in S1 = 0), and,
in this case, it does not matter its value in S2 (could be
0 or 1). Besides, in Product 1, the feature “Image” is
selected, but at the static binding time (its correspon-
ding bit in S2 = 0), meaning that it is always active.
In Product 2, both features “Image” and “Video” are
selected (bit in S1 = 1) and left to be bound at runtime
(bit in S2 = 1).
Table 2: Example of product representation.
Product Feature bit of S1 bit of S2
Product 1
Image 1 0
Video 0 0/1
Product 2
Image 1 1
Video 1 1
In relation to the features states presented in
Section 4.3.1, when the value s(x), associated to the
feature represented by the vertex x in the graph, is 0,
it means that S1 = 0. When S1 = 1 and S2 = 0, we
have s(x) = 1. And when S1 = 1 and S2 = 1, we have
s(x) = 2.
5.1.1 Feature Models Setting
Henceforward, we call the feature model from the
Mobiline project (Marinho et al., 2013) as Mob, the
model of SmartHome as Sma, and the artificial fea-
ture model as 200D. To generate the artificial DSPL
feature model, we used a procedure based on the met-
hod of Thum et al. (Thum et al., 2009) to randomly
create a feature model.
Table 3 presents an overview of the feature models
used in the experiments. In this table, we show the
number of features and rules of the models used.
Table 3: Feature models used in the experiment.
Model N. of features N. rules
Mob 33 24
Sma 17 19
200D 200 128
5.1.2 Feature Values and Costs
The value of a feature indicates their relevance to the
customer and can be defined by the Requirement Ana-
lyst according to the requirements provided by the cu-
stomer. In our proof of concept, we consider that the
value of a feature can vary from 0 to 5 according to
their level of relevance to the customer, where:
value =
0, if the feature is irrelevant
1, if the feature is very little relevant
2, if the feature is somewhat relevant
3, if the feature is moderately relevant
4, if the feature is very relevant
5, if the feature is extremely relevant
In an SPL or DSPL, the cost of a feature must be
defined by the development team, because it is rela-
ted to the cost of generating and modifying the assets
(e.g., code elements) which will compose the featu-
res (Cruz et al., 2013) (Santos Neto et al., 2016). We
suggest the following formulas to calculate the costs
of the feature in static (costE) and dynamic (costD)
binding:
costE = costIN + costBA + costCF and
costD = costIN + costBA + costCF + costAD
where
• costIN is the inherent cost of using the feature,
which includes the value of use of the feature and
its assets that were created during the DSPL engi-
neering process;
• costBA is the average cost of energy consumption
of the feature in the deploy environment;
• costCF is the cost of customizing feature assets
for the product;
• costAD is the cost of the insertion of the runtime
adaptation logic; this cost is related to the context-
awareness of DSPLs;
Optimized Feature Selection for Initial Launch in Dynamic Software Product Lines
151

We also consider that each of these costs can as-
sume a value between 0 and 5 according to the level
of complexity of the task associated (costIN, costCF,
costAD) or energy consumption (costBA), where:
cost =
0, if it does not exists
1, if it is too low
2, if it is low
3, if it is moderate
4, if it is high
5, if it is too high
The level of complexity, mentioned before, invol-
ves not only the difficulty of carrying out the task but
also the time spent on it and the impact on the product.
The values and costs for Mobiline and Smart-
Home models were generated artificially following
the above-mentioned ranges. To obtain the real costs,
it is needed to survey the customers and developers of
this DSPLs, but this was out of the scope of this work.
For the artificial DSPL, the costs and values were also
generated randomly.
5.1.3 Setting Up the Algorithm
In the algorithms used in the proof of concept, we ap-
plied the following parameters: Population Size of
100, Crossover (Single-Point Crossover) Probability
of 0.9 and Mutation (Bit-Flip Mutation) Probability
of 0.05. Besides, for the feature models (Mob, Sma,
200D), we ran the algorithms with 200k evaluations.
In all cases, each algorithm run was repeated 30 times
for ensuring more reliability.
5.1.4 The Graph
In our proof of concept, the graph is represented as
an object. Besides, we use the adjacent list concept
for its representation. In practice, a vector of Vertex
objects was created, where each Vertex contains a
list of edges, which have this vertex as origin, and a
color (black or white), to verify whether the feature
related to the vertex is mandatory or not. Each edge is
represented by a tuple that indicates the destiny vertex
of the edge and a type (continuous, dotted or dashed),
to denote to which set of edges (see Section 4.1) it
belongs. Lastly, the GraphModel object also has a
second list containing the features groups.
5.2 Execution Flow
Figure 4 shows the flowchart of the execution of our
proof of concept. The process started when the fea-
ture model was used as input to our flow. Next, the
Figure 4: Proof of Concept flowchart.
graph is generated, and the multi-objective optimiza-
tion algorithm was configured. Once the configurati-
ons are done, we executed the optimization algorithm.
During the execution of each loop of the optimization
algorithm, the graph was used to validate solutions.
At the end of the execution of the algorithm, the
best valid solutions were identified. We can consider
the best solutions like the one with the highest dyna-
micity, the lowest cost, the best value, or those soluti-
ons that are closest to the Pareto front, such as, we can
use measures like SPREAD (Deb et al., 2002b) and
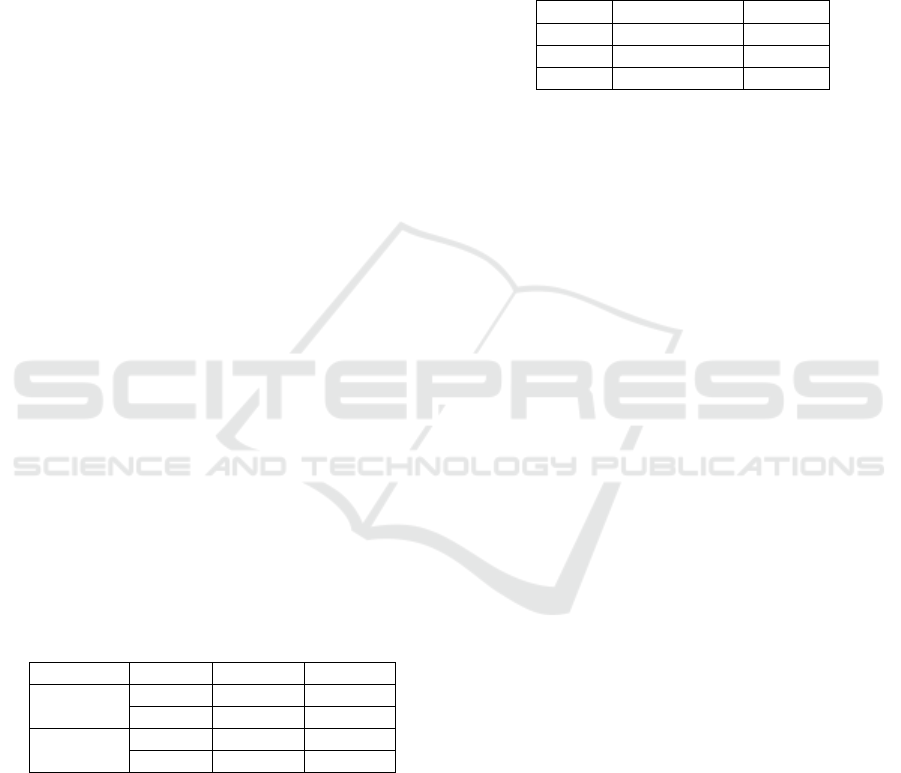
Hypervolume (HV) (Zitzler and Thiele, 1999). Table
4 presents the average of the number of correct solu-
tions, solution values, solution costs, number of dyn-
amic features, HV and SPREAD. These values were
generated by the optimization algorithms using Mob,
Sma and 200D models considering a maximum cost
equals to 400 for the first two models and 700 for the
last one. Table 5 presents three feasible solutions for
SMA model after running the optimization algorithm
NSGAII. This data can be used to assistant the choose
of the most appropriate solution for the product of the
DSPL.
Lastly, the DSPL Requirement Analyst selects the
solution from which a feature model will be gene-
rated to be used by the development team. In our
proof of concept, for each valid solution selected,
an XML file following a pattern similar to the one
used by the Software Product Line Online Tools
(S.P.L.O.T)(Mendonca et al., 2009) can be generated
as output. Figure 5 presents an example of the gene-
rated XML file, and the corresponding features, from
the Solution 1 presented in Table 5.
5.3 Discussion
This proof of concept shows initial evidence that
our model can be used to provide an optimized way
to solve the feature selection problem for the initial
launch in DSPL. Our model allows the use of dif-
ferent optimization algorithms to check and generate
optimal solutions.
Regarding Table 4, it is possible to verify a large
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
152
Table 4: Results of the executions of the optimization algorithms.
Alg Mod Correctness Value Cost D. Feat. SPREAD HV
NSGA
Mob 34.86 ± 3.7 52 ± 1.7 290.49 ± 8.34 14.5 ± 0.5 0.70 ± 0.03 0.41 ± 0.004
Sma 50.16 ± 2.0 59 ± 0.6 173.42 ± 2.18 4.5 ± 0.5 0.91 ± 0.03 0.40 ± 0.002
200D 18 ± 6.4 233 ± 17 497.40 ± 41.87 28.5 ± 3.5 0.66 ± 0.04 0.34 ± 0.008
IBEA
Mob 2.6 ± 1.47 64.4 ± 1.8 375.05 ± 10.88 22.23 ± 0.6 0.64 ± 0.02 0.47 ± 0.003
Sma 44.3 ± 1.23 62.6 ± 0.1 196.82 ± 0.91 7 ± 0 0.97 ± 0.02 0.42 ± 0.001
200D 65.5 ± 6.1 307.7 ± 6.5 557.18 ± 13.31 40.7 ± 1.5 0.57 ± 0.03 0.47 ± 0.007
Table 5: Example of solutions for Smart Home (Sma) DSPL.
Variable 1 Variable 2 Value Cost D. Feat.
Solution 1 11111101011101010 00100100000101010 44.0 128.0 5
Solution 2 11111101011111010 00000000000101000 49.0 128.0 2
Solution 3 11111101011111010 00000100000100010 49.0 132.0 3
variation of the results obtained by the algorithms
used. This variation came from the implementation of
the algorithms. In a nutshell, it is possible to realize
that the NSGA algorithm generated on average soluti-
ons with lower costs, but the IBEA algorithm genera-
ted on average solutions with better values and more
dynamic features. We believe that the small number
of correct solutions generated by the IBEA algorithm
for the Mobiline features model is a result of the max-
imum cost that was overcome by the majority of the
solutions generated by the IBEA. In the other models,
this does not occur. In these models, it is possible
to note that the average cost was considerably lower
than the maximum cost established. Finally, the small
amount of correct solutions obtained by the NSGA
algorithm for the 200D model corroborates with what
was stated in (Sayyad et al., 2013b), that indicated the
NSGA algorithm tends to deteriorate rapidly.
We emphasize that the detailed comparison of the
results generated by the optimization algorithms goes
beyond the scope of this paper. Thus, it is important
to highlight that the goal of this proof of concept was
not to present the best solution regarding the model
implementation or the best optimization algorithm to
solve the problem of the selection of features in DS-
PLs.
In addition, the difficulty to obtain real Dyna-
mic Software Product Lines, as cited also in (Bezerra
et al., 2016), makes it difficult to evaluate the optimi-
zation model for the feature selection problem in the
real environment. Lastly, the study of the best algo-
rithms to solve the presented problem is left as future
work.
5.4 Threats to Validity
One threat to the validity of the results is the use of
synthetic data as attributes of features, i.e., values,
cost and the DSPL generated artificially. We produce
these data artificially due to the difficulty of obtaining
real DSPL data. The generation of synthetic data has
also been used by other authors in experiments with
search-based algorithms (Sayyad et al., 2013b)(Guo
et al., 2011).
It is important to emphasize that there is not a pre-
cise way to define the feature cost since it depends
on the implementation of the product. In (Cruz et al.,
2013) and (Santos Neto et al., 2016) are presented es-
timation approaches for generating this cost, but this
forecast depends on the information of the assets rela-
ted to each feature, and measures correlated to them.
For example, these approaches use the number of li-
nes of code and coupling of an asset.
Another threat to validity is related to the Pareto
Front generated from the JMetal (i.e., without using
a brute force search algorithm to find the real Pareto
Front). This can have impacted the results of the eva-
luations, because it may not be the best solution. Be-
sides, the way with the structure of the graph was im-
plemented affects both time and correctness rate and,
therefore, more experiments are required to measure
the impact of this implementation on the objectives
optimized.
6 RELATED WORK
We identified in the literature related work to the
feature selection problem in a SPL (Guo et al.,
2011)(lin Wang and wei Pang, 2014)(Sayyad et al.,
2013b)(Henard et al., 2015) and in a DSPL (Pas-
cual et al., 2013b; Pascual et al., 2015)(Pascual et al.,
2013a)(Sanchez et al., 2013).
Guo et al. (Guo et al., 2011) and Wang and Pang
(lin Wang and wei Pang, 2014) present approaches
mono-objective for SPL feature selection. Guo et al.
(Guo et al., 2011) use Genetic Algorithm to find an
optimized feature selection that minimizes or max-
Optimized Feature Selection for Initial Launch in Dynamic Software Product Lines
153
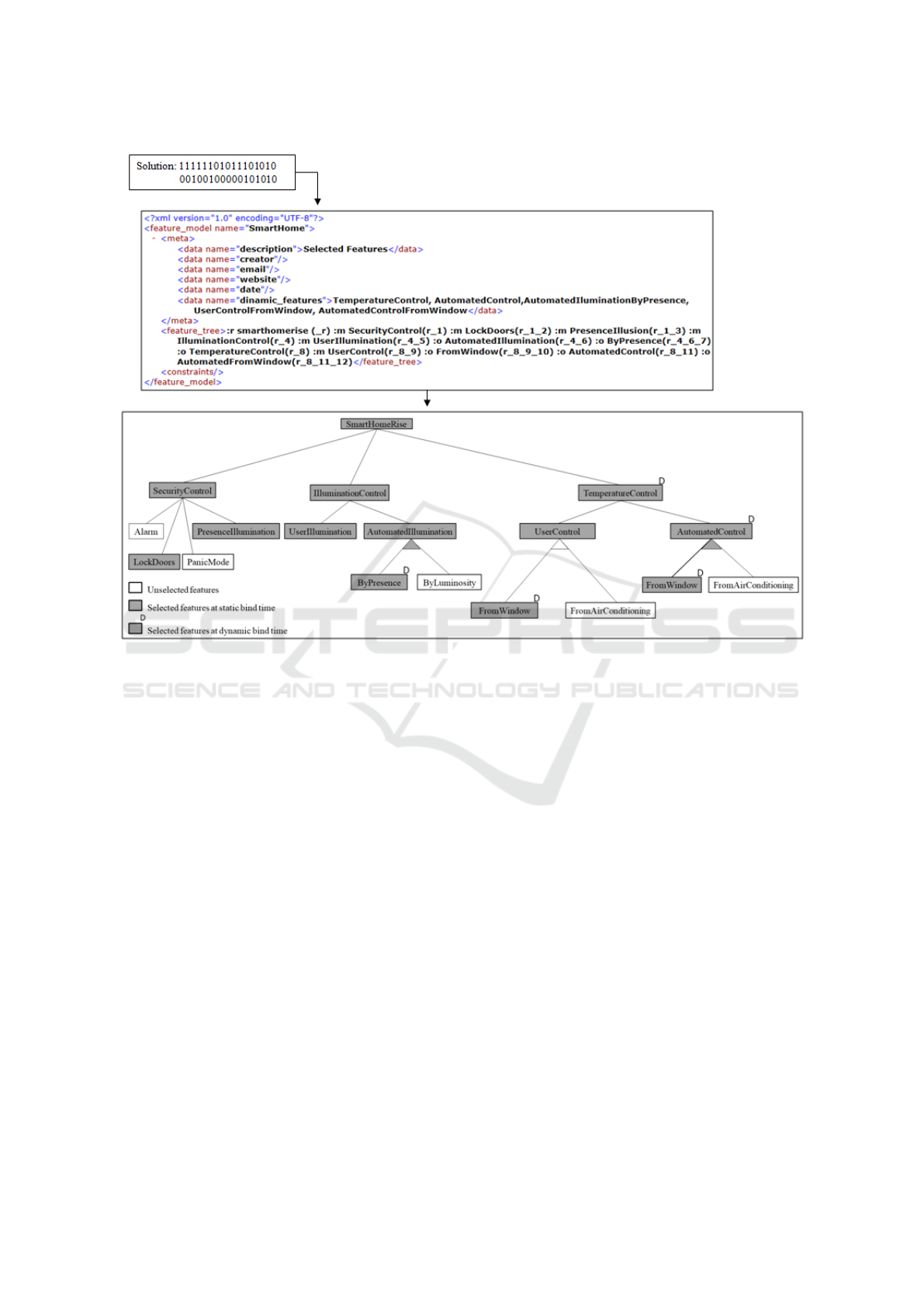
Figure 5: Example of solution for the SmartHome DSPL.
imizes an objective function. Wang and Pang (lin
Wang and wei Pang, 2014) uses a graph to represent
a feature model and an ant colony optimization to get
a solution to the SPL feature selection optimization
problem that maximizes the product value subject to
constraints.
Sayyad et al. (Sayyad et al., 2013b) compare the
results of seven multi-objective evolutionary optimi-
zation algorithms using up to five optimization ob-
jectives. Christopher et al. (Henard et al., 2015) pro-
pose SATIBEA, an approach for configuring massive
SPLs with over five thousand features using an appro-
ach that blends an optimization by merging the IBEA
algorithm and a model validation using SAT solver.
In the DSPL scenario, Pascual et al. (Pascual
et al., 2013b; Pascual et al., 2013a; Pascual et al.,
2015) describe an approach for the automatic runtime
generation of application configurations and reconfi-
guration plans in a DSPL. The goal of this approach
is to choose the architectural configuration, using a
genetic algorithm, which provides the best functiona-
lity, while not exceeding the available resources (e.g.,
memory) at runtime. Sanchez et al. (Sanchez et al.,
2013) propose an algorithm for selecting at runtime
the configuration that optimizes given quality metrics.
The goal of this approach is to determine the arrange-
ment most suitable, especially concerning the follo-
wing non-functional aspects: quality of service, per-
formance, and reconfiguration time.
As described in the previous paragraphs, we iden-
tified work related to the feature selection problem
in SPL (Guo et al., 2011)(Wang and Peng, 2014)
(Sayyad et al., 2013b) (Henard et al., 2015) and some
work dealing with the feature selection problem in
a DSPL at runtime (Pascual et al., 2013b) (Pascual
et al., 2013a) (Pascual et al., 2015) (Sanchez et al.,
2013).
The studies focused on SPL do not address run-
time adaptation, and then, they do not take into ac-
count the dynamic binding time. The latter, addres-
sing DSPLs, were worried with the optimization of
the resources used (Pascual et al., 2013a)(Pascual
et al., 2013b)(Pascual et al., 2015) or of quality me-
trics at runtime (Sanchez et al., 2013). Thus, these
studies do not support the decision of which features
should be bound statically and which one should be
bound dynamically.
We also find in the literature related work (White
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
154

et al., 2014) (Lochau et al., 2017) that considers
the multi-step configuration problem to DSPL, that
involves transitioning from a starting configuration
through a series of intermediate configurations to a
configuration that meets a desired set of end state re-
quirements. However, these studies do not aim to
achieve a feature optimized configuration. Thus, the
difference of our work is that our proposed graph mo-
del can solve the feature selection problem in DSPL’s
by indicating a optium solution and considering both
the static and dynamic binding time.
7 CONCLUSIONS
In a typical SPL, the feature selection is made stati-
cally only, whereas in a DSPL we also have the dyna-
mic binding to provide product adaptation at runtime.
This runtime adaptation introduces a cost that can be
reduced by defining a partial product configuration for
initial launch.
We proposed a graph model and a multi-objective
formulation that considers both static and dynamic
binding time to help in the decision of which features
should be bound permanently at static binding time
and which features should be bound at the dynamic
binding time. Our model allows the use of different
techniques to check and generate the optimal soluti-
ons.
We also presented a proof of concept that shows
the feasibility of using our model to obtain optimized
feature model configurations, indicating if the featu-
res should have to be bound at the static or dynamic
time. With this information, the Requirement Analyst
has a set of feasible submodels (i.e., DSPL products)
to be offered to the customer.
As future work, it can be verified other ways to
implement the graph structure and the best way to cal-
culate the cost of dynamic feature (costD) and static
feature (costE). Also, experiments can be performed
to assess what is the best multi-objective optimization
algorithm to be used for our proposed formulation.
Moreover, it would be interesting to investigate if the
proposed graph could be adapted to check a feasibi-
lity of the features model at runtime when there is a
change in the product.
REFERENCES
Benavides, D., Segura, S., and Ruiz-Cort
´
es, A. (2010). Au-
tomated analysis of feature models 20 years later: A
literature review. Inf. Syst., 35(6):615–636.
Bencomo, N., Hallsteinsen, S., and Santana de Almeida, E.
(2012). A view of the dynamic software product line
landscape. Computer, 45(10):36–41.
Bezerra, C. I., Andrade, R. M., and Monteiro, J. M. (2016).
Exploring quality measures for the evaluation of fe-
ature models: a case study. Journal of Systems and
Software.
Capilla, R., Bosch, J., Trinidad, P., Cort
´
es, A. R., and Hin-
chey, M. (2014). An overview of dynamic software
product line architectures and techniques: Observati-
ons from research and industry. Journal of Systems
and Software, 91:3–23.
Carvalho, M. L. L., da Silva, M. L. G., da Silva Gomes,
G. S., Santos, A. R., do Carmo Machado, I., de Je-
sus Souza, M. L., and de Almeida, E. S. (2017). On
the implementation of dynamic software product li-
nes: An exploratory study. Journal of Systems and
Software, 136(Supplement C):74 – 100.
Chakravarthy, V., Regehr, J., and Eide, E. (2008). Edicts:
Implementing features with flexible binding times. In
Proceedings of the 7th International Conference on
Aspect-oriented Software Development, AOSD ’08,
pages 108–119, New York, NY, USA. ACM.
Cruz, J., Neto, P. S., Britto, R., Rabelo, R., Ayala, W., Soa-
res, T., and Mota, M. (2013). Toward a hybrid appro-
ach to generate software product line portfolios. In
Evolutionary Computation (CEC), 2013 IEEE Con-
gress on, pages 2229–2236. IEEE.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T.
(2002a). A fast and elitist multiobjective genetic al-
gorithm: Nsga-ii. IEEE transactions on evolutionary
computation, 6(2):182–197.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T.
(2002b). A fast and elitist multiobjective genetic al-
gorithm: Nsga-ii. Evolutionary Computation, IEEE
Transactions on, 6(2):182–197.
Durillo, J. J. and Nebro, A. J. (2011). jMetal: A java fra-
mework for multi-objective optimization. Advances in
Engineering Software, 42:760–771.
Eriksson, M. and Hagglunds, A. (2003). An introduction
to software product line development. In Proceedings
of Ume
˚
a’s Seventh Student Conference in Computing
Science, UMINF, volume 3, pages 26–37.
Fernandes, P., Werner, C., and Teixeira, E. (2011). An
approach for feature modeling of context-aware soft-
ware product line. The Journal of Universal Computer
Science, 17(5).
Guo, J., White, J., Wang, G., Li, J., and Wang, Y. (2011). A
genetic algorithm for optimized feature selection with
resource constraints in software product lines. J. Syst.
Softw., 84(12):2208–2221.
Hallsteinsen, S., Hinchey, M., Park, S., and Schmid, K.
(2008). Dynamic software product lines. Computer,
41(4):93–95.
Harman, M., Jia, Y., Krinke, J., Langdon, W. B., Petke, J.,
and Zhang, Y. (2014). Search based software engi-
neering for software product line engineering: A sur-
vey and directions for future work. In Proceedings of
the 18th International Software Product Line Confe-
Optimized Feature Selection for Initial Launch in Dynamic Software Product Lines
155

rence - Volume 1, SPLC ’14, New York, NY, USA.
ACM.
Henard, C., Papadakis, M., Harman, M., and Le Traon,
Y. (2015). Combining multi-objective search and
constraint solving for configuring large software pro-
duct lines. In Software Engineering (ICSE), 2015
IEEE/ACM 37th IEEE International Conference on,
volume 1, pages 517–528. IEEE.
Kang, K. C., Cohen, S. G., Hess, J. A., Novak, W. E.,
and Peterson, A. S. (1990). Feature-oriented dom-
ain analysis (foda) feasibility study. Technical report,
Carnegie-Mellon Univ Pittsburgh Pa Software Engi-
neering Inst.
lin Wang, Y. and wei Pang, J. (2014). Ant colony optimi-
zation for feature selection in software product lines.
Journal of Shanghai Jiaotong University (Science),
19(1):50–58.
Lochau, M., B
¨
urdek, J., H
¨
olzle, S., and Sch
¨
urr, A. (2017).
Specification and automated validation of staged re-
configuration processes for dynamic software product
lines. Software & Systems Modeling, 16(1):125–152.
Lopez-Herrejon, R. E., Linsbauer, L., and Egyed, A. (2015).
A systematic mapping study of search-based software
engineering for software product lines. Information
and Software Technology, 62:33–51.
Marinho, F. G., Andrade, R. M. C., Werner, C., Viana, W.,
Maia, M. E. F., Rocha, L. S., Teixeira, E., Filho, J. a.
B. F., Dantas, V. L. L., Lima, F., and Aguiar, S. (2013).
Mobiline: A nested software product line for the dom-
ain of mobile and context-aware applications. Sci.
Comput. Program., 78(12):2381–2398.
Mendonca, M., Branco, M., and Cowan, D. (2009). Splot:
software product lines online tools. In Proceedings
of the 24th ACM SIGPLAN conference companion on
Object oriented programming systems languages and
applications, pages 761–762. ACM.
Olaechea, R., Rayside, D., Guo, J., and Czarnecki, K.
(2014). Comparison of exact and approximate multi-
objective optimization for software product lines. In
Proceedings of the 18th International Software Pro-
duct Line Conference - Volume 1, pages 92–101, NY,
USA. ACM.
Pascual, G. G., Lopez-Herrejon, R. E., Pinto, M., Fuentes,
L., and Egyed, A. (2015). Applying multiobjective
evolutionary algorithms to dynamic software product
lines for reconfiguring mobile applications. Journal of
Systems and Software, 103:392–411.
Pascual, G. G., Pinto, M., and Fuentes, L. (2013a). Run-
time adaptation of mobile applications using genetic
algorithms. In Proceedings of the 8th International
Symposium on Software Engineering for Adaptive and
Self-Managing Systems, pages 73–82, Piscataway, NJ,
USA. IEEE Press.
Pascual, G. G., Pinto, M., and Fuentes, L. (2013b). Run-
time support to manage architectural variability spe-
cified with cvl. In Proceedings of the 7th European
Conference on Software Architecture, ECSA’13, pa-
ges 282–298, Berlin, Heidelberg. Springer-Verlag.
Rosenm
¨
uller, M., Siegmund, N., Apel, S., and Saake, G.
(2011). Flexible feature binding in software product
lines. Automated Software Engg., 18(2):163–197.
Rosenm
¨
uller, M., Siegmund, N., Saake, G., and Apel, S.
(2009). Combining static and dynamic feature binding
in software product lines. Technical report fin-013,
Otto-von-Guericke-Universit at Magdeburg.
Sanchez, L. E., Moisan, S., and Rigault, J.-P. (2013).
Metrics on feature models to optimize configuration
adaptation at run time. In Proceedings of the 1st In-
ternational Workshop on Combining Modelling and
Search-Based Software Engineering, pages 39–44,
NJ, USA. IEEE Press.
Santos Neto, P. d. A., Britto, R., Rab
ˆ
elo, R. d. A. L., de Al-
meida Cruz, J. J., and Lira, W. A. L. (2016). A hybrid
approach to suggest software product line portfolios.
Applied Soft Computing, 49:1243–1255.
Sayyad, A. S., Ingram, J., Menzies, T., and Ammar, H.
(2013a). Optimum feature selection in software pro-
duct lines: Let your model and values guide your
search. In Proceedings of the 1st International
Workshop on Combining Modelling and Search-Based
Software Engineering, pages 22–27, Piscataway, NJ,
USA. IEEE Press.
Sayyad, A. S., Menzies, T., and Ammar, H. (2013b). On
the value of user preferences in search-based software
engineering: A case study in software product lines.
In Proceedings of the 2013 International Conference
on Software Engineering, pages 492–501, NJ, USA.
IEEE Press.
Thum, T., Batory, D., and Kastner, C. (2009). Reaso-
ning about edits to feature models. In Proceedings of
the 31st International Conference on Software Engi-
neering, ICSE ’09, pages 254–264, Washington, DC,
USA. IEEE Computer Society.
White, J., Galindo, J. A., Saxena, T., Dougherty, B., Benavi-
des, D., and Schmidt, D. C. (2014). Evolving feature
model configurations in software product lines. Jour-
nal of Systems and Software, 87:119–136.
Zitzler, E. and Thiele, L. (1999). Multiobjective evoluti-
onary algorithms: a comparative case study and the
strength pareto approach. IEEE Transactions on Evo-
lutionary Computation, 3(4):257–271.
ICEIS 2018 - 20th International Conference on Enterprise Information Systems
156
