
Concept for Intra-Hour PV Generation Forecast based on
Distributed PV Inverter Data
An Approach Considering Machine Learning Techniques and Distributed Data
Stefan Übermasser
1
, Simon Kloibhofer
1
, Philipp Weihs
2
and Matthias Stifter
1
1
AIT Austrina Institute of Technology, Giefinggasse 2, 1210 Vienna, Austria
2
Institute of Meteorology, University of Natural Resources and Life Sciences,
Gregor-Mendel-Straße 33, 1180 Vienna, Austria
Keywords: Distributed Data, Machine Learning, Photovoltaic Systems, Recurrent Neural Network, Power Forecast,
Short-Term Forecast, Renewable Energy, Distributed Energy Resources.
Abstract: The mass-introduction of small scale power generation units like photovoltaic systems at household levels
increase the risk for system unbalances, due to their stochastic generation profile. Additionally, upcoming
technologies such as electric vehicles, battery storage systems and energy management systems lead to a
change from consumer households to prosumers with a significant different residual load profile. For
optimizing the profile of future prosumers, especially the forecast for PV generation is crucial. Whilst
traditional weather forecasts are based on a few hundred metering locations in the case of Austria, more than
55000 PV systems are currently connected to the Austrian Power grid. Due to the low areal coverage of
common metering locations, weather forecasts do not take local phenomena like shadows from clouds into
account. An approach using generation data from neighbouring PV systems together with machine learning
methods provides a promising alternative for individual location based intra-hour forecasts. This paper
describes the requirements and methods of such a concept and concludes with a first proof of concept.
1 INTRODUCTION
The increasing introduction of distributed energy
resources (DER) like photovoltaic systems (PV) to
medium and low voltage distribution grids creates
new challenges but also chances for relevant
stakeholders like distribution system operators,
energy or service providers but also end customers.
Especially the fluctuating generation from PV
systems and the difficulties in forecasting changes in
power generation are causing increasing risks and
also costs in respect to a stable and reliable energy
supply and grid operation. Since a large share of PV
systems is installed directly at customer (prosumer)
premises, strategies for optimization at end customer
levels via home energy management systems
(HEMS) rely on as precise as possible intraday or
short-term forecasts for operating connected devices
(e.g. electric car, battery storage system …) as cost
efficient as possible. Power generation from PV
systems is highly influenced by local conditions (e.g.
clouds, temperature, type and setup of the system).
Hence, forecasting needs to take local parameters into
account which are based on satellite images or
stationary metering systems. For metering the
relevant parameters, in Austria less than 300 local
metering points exist (“Meteorological Network —
ZAMG,” 2017), which cannot provide the data which
is needed for an individual and local power forecasts
for PVs (see Figure 1).
Figure 1: Meteorological network of ZAMG (“Meteoro-
logical Network — ZAMG,” 2017) which offers
meteorological data from more than 250 meteorological
stations situated in all climate regions and altitudes Austria-
wide.
286
Übermasser, S., Kloibhofer, S., Weihs, P. and Stifter, M.
Concept for Intra-Hour PV Generation Forecast based on Distributed PV Inverter Data.
DOI: 10.5220/0006775802860293
In Proceedings of the 7th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2018), pages 286-293
ISBN: 978-989-758-292-9
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
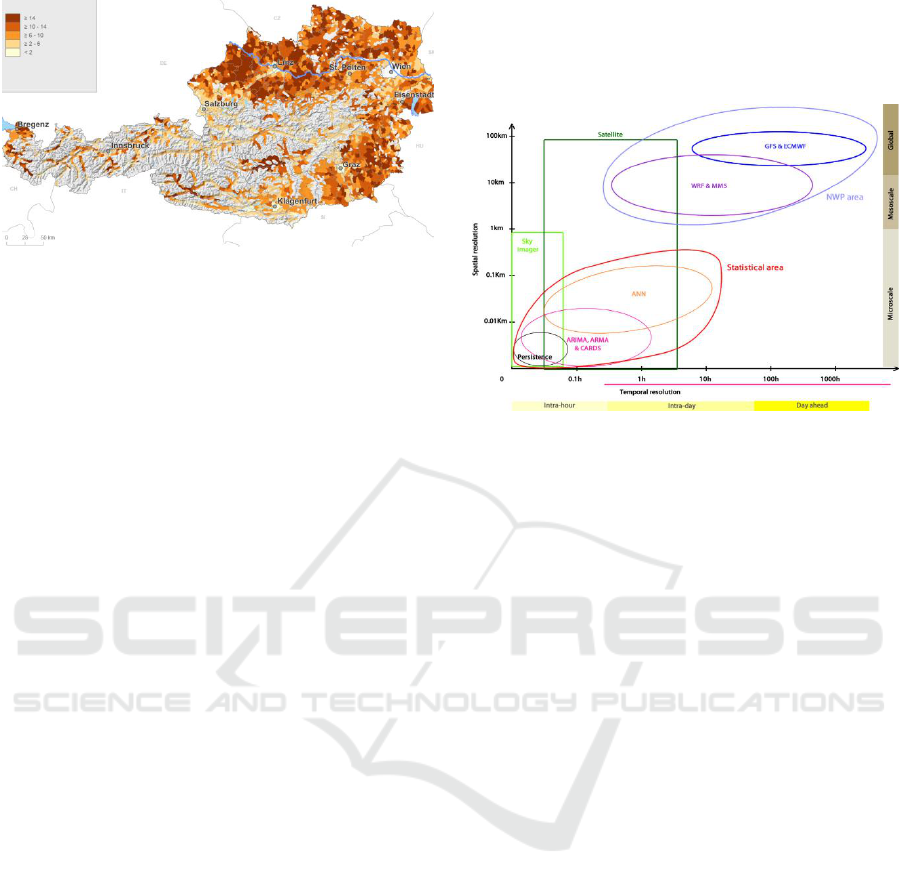
Figure 2: Distribution and number of PV systems in Austria
(systems per 1000 inhabitants) (“Photovoltaik Karten,”
2017).
In contrast there are currently more than 55.000
individual PV systems installed at the Austrian area
and counting. Those systems are spread out among all
populated areas of Austria (see Figure 2).
The growing numbers of high-resolution data
loggers (at inverters of PV systems) provide a high
potential for novel forecasting methods based on such
distributed measurements. Therefore, this approach is
taking into account spatial phenomena like cloud
movement. Using the individual generation data from
neighboring PV systems on machine learning
methods would enable approaches for local forecasts
for each PV site. In this paper a recurrent neural
network approach building on the open source
software library for machine intelligence
TensorFlow™ (“TensorFlow,” n.d.) is developed.
This approach is taking into account the spatial and
temporal dimension of power generation changes.
The goal is to show, that with this approach
significant improvements over forecasts based on
single site time series forecasts can be achieved.
State of the art forecasts for PV generation are
summarized in (Antonanzas et al., 2016). Most
popular are statistical methods relying on local
measurements for short forecast horizons and models
building on weather prediction for longer horizons
(see Figure 3). There are some approaches to include
also the data of neighbouring PV stations into the
forecast model. (Bessa et al., 2015) uses a vector
autoregressive (VAR) model to forecast 1 to 3 hours
ahead, showing improvement over an AR model
without other stations. (Lonij et al., 2013) uses a data
set of 80 rooftop PV systems on a 50x50 km area for
intra hour forecast. One of the problems occurring in
both references [5] and [6] are the coarse
measurement intervals of 15 minutes, which do not
allow following cloud shadows precisely.
Furthermore, there exist some larger scale projects,
like (Williamson, 2016), where a large number of
distributed sensors (PV inverters and fish eye cameras
for cloud detection) are connected with machine
learning techniques to improve the forecast over the
state of Canberra in Australia.
Figure 3: Overview of state of the art forecast methods for
PV generation (Antonanzas et al., 2016).
Machine learning techniques are already applied
in many publications of PV forecasting, but the
application is on a quite basic level up to now. Simple
feed-forward neural networks are used often, because
they are easily implemented, while advanced
architectures are not considered in literature. Areas
with advanced use of neural networks are for example
image recognition (e.g. for the detection of clouds and
wind direction or speed) and language processing.
While algorithms from image recognition cannot be
used for the concept described in this paper (because
they rely on strictly gridded spatial positions), the
time domain is represented very well in other areas of
research. Recurrent neural networks use the time
ordered nature of data for prediction. The long short-
term memory (LSTM) recurrent neural network for
example reaches outstanding scores at benchmarks
for speech recognition tasks (Graves et al., 2013).
Hence, the concept described in this work will use
recurrent neuronal networks.
The main focus of this paper is to describe the
general concept and the developed method and to
point out how a neural network method has to be
designed to fit this field, which differs in several
respects from classical machine learning disciplines.
First we apply a simplified scenario for a first proof
of concept. In future, special challenges including the
day cycle, irregularly spatial distribution of data
points, different weather regimes and other
parameters will be approached.
Concept for Intra-Hour PV Generation Forecast based on Distributed PV Inverter Data
287
2 CONCEPT DESCRIPTION
This position paper aims to describe a concept for an
intra-day PV generation forecast based on distributed
(neighbouring) PV generation data and machine
learning methods. The local generation from PV
Systems is influenced by a number of factors. In
general, the mathematical model for understanding
the PV generation profile can be divided into three
main models:
Irradiation Model:
It describes the global radiation at a certain
location. Extra-terrestrial solar radiation can be
calculated based on geometric considerations.
Furthermore, the influence of the terrestrial
atmosphere on a clear day is often included into this
part of the model.
Statistical Model:
This model describes the local disturbances
caused mainly by local weather phenomena.
Physical Model:
The physical model contains the characteristics of
the technical system (cell type, inverter, position …).
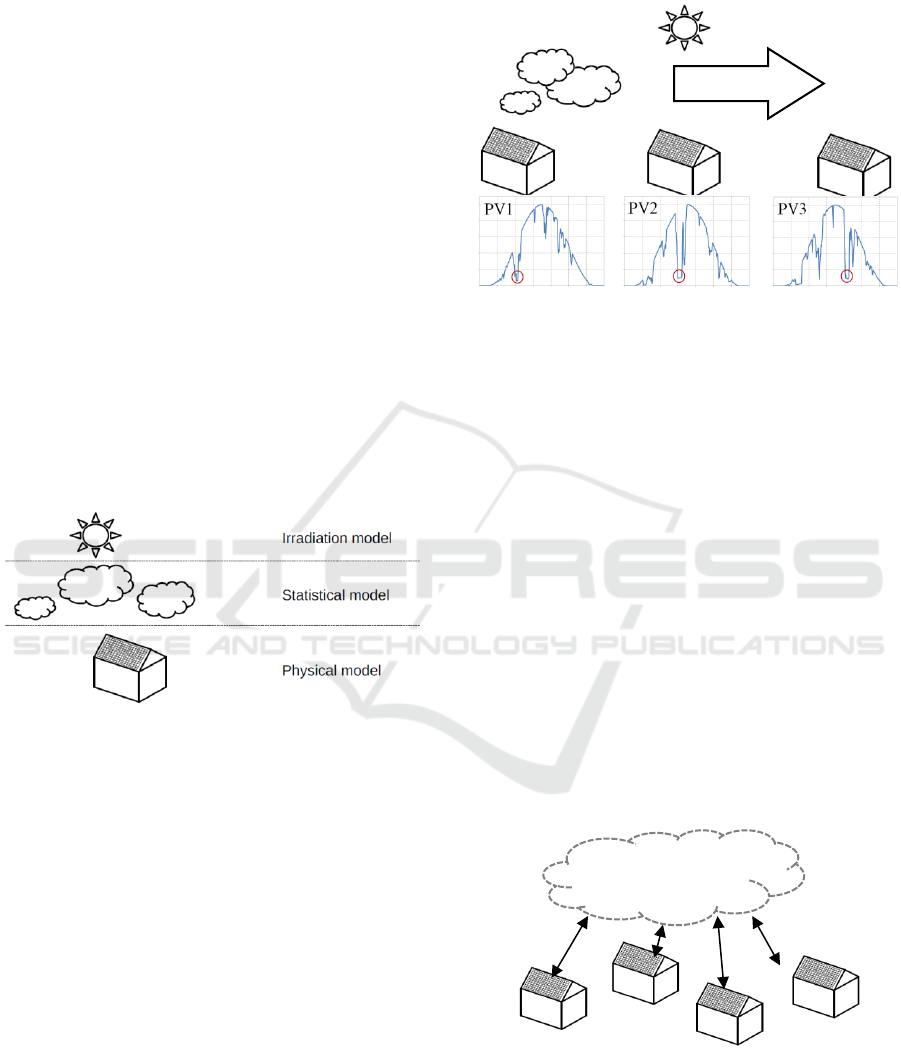
Figure 4: Types of models for the description of influence
parameters for PV generation and forecast.
Those three aspects are usually modelled
independently due to their diverse nature and
characteristics by different mathematical methods. In
reality, the effects of these three models are reflected
in the power generation profile of each PV system,
which can be measured directly at the inverter or grid
connection point. Whilst different mathematical
approaches were necessary in the past to conquer the
individual characteristics and challenges for each
model, progress in machine learning methods might
provide a new unified tool for the analysis of
generation data with respect to local power forecasts.
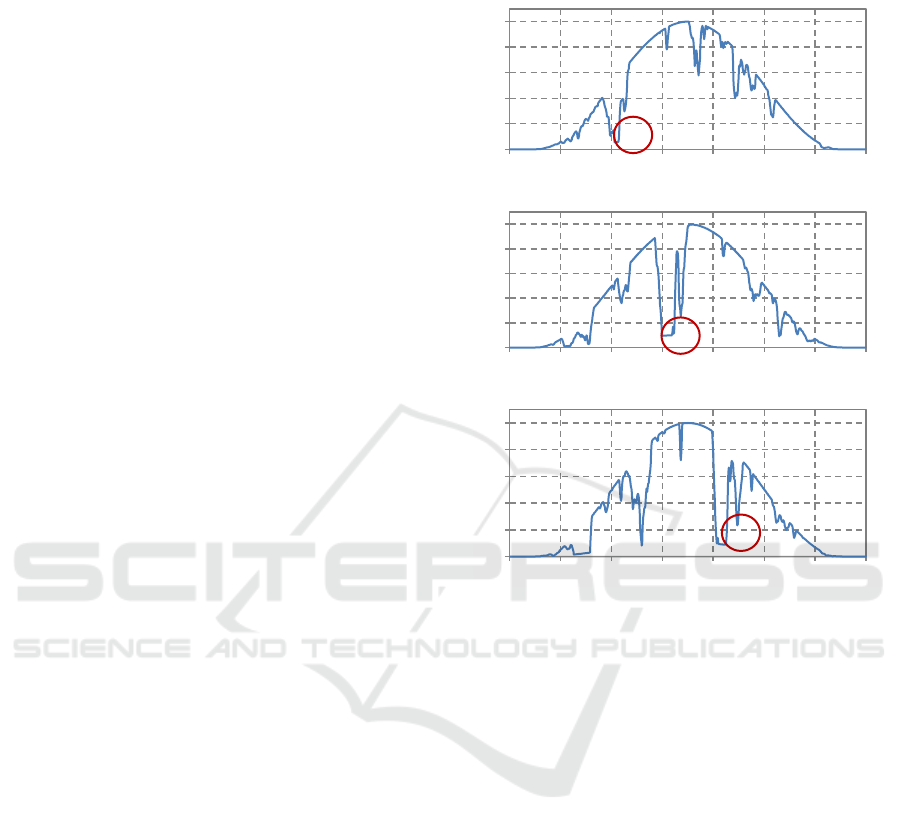
Figure 5 provides a schematic example of a time-
delayed power drop at neighboring PV systems
(along the wind direction) caused by a moving cloud.
Depending on the distance of the PV systems to each
other and the wind speed the probability for a similar
power drop at a neighboring PV system in direction
of the wind could be calculated.
Figure 5: Example of a time-delayed moving power drop at
neighbouring PV systems caused by a moving cloud (large
images of the PV diagrams in the APPENDIX).
As a requirement for the workability of the approach
described in this paper, participating PV Systems are
required to share the following data over a centralized
cloud based data infrastructure:
Location [long/lat]: Geographical location of
the PV System. This information is necessary to
identify neighboring systems in reference to
wind direction and speed.
Timestamp [yyyy-mm-dd hh:mm:ss]:
Timestamp of the data transmission consisting
of date and time. This information is necessary
to calculate forecasts.
Power [kW]: The actual power output of the PV
system at a specific timestamp.
Such data needs to be submitted by each PV system.
This could either be done by a peer-to-peer network
or a centralized approach as shown in Figure 6.
Figure 6: Simplified data transfer between individual PV
systems by a centralized cloud system.
Wind direction
Data Cloud
SMARTGREENS 2018 - 7th International Conference on Smart Cities and Green ICT Systems
288
3 PROOF OF CONCEPT
Following the idea of the concept description (Section
2) basic requirements, method and a first use-case are
defined for a first proof of concept.
3.1 Requirement Analysis
In order to be able to establish a first proof of concept,
the requirements for method and use-case have to be
analysed. This section will mainly focus on the
requirements on data transmission and the
geographical distances between neighbouring
systems in dependence of wind speeds. As an
additional parameter, the forecasting horizon shall be
discussed to define the objective of this method.
Depending on the wind speed and the target
forecast horizon, the minimum distance to the next
neighboring system can be calculated. E.g. for a
forecast horizon of 15 minutes, the data signal of a
neighboring system would be needed 15 minutes
prior the forecasted point in time. This means
depending on the wind speed and assuming a real-
time signal transmission a minimum distance
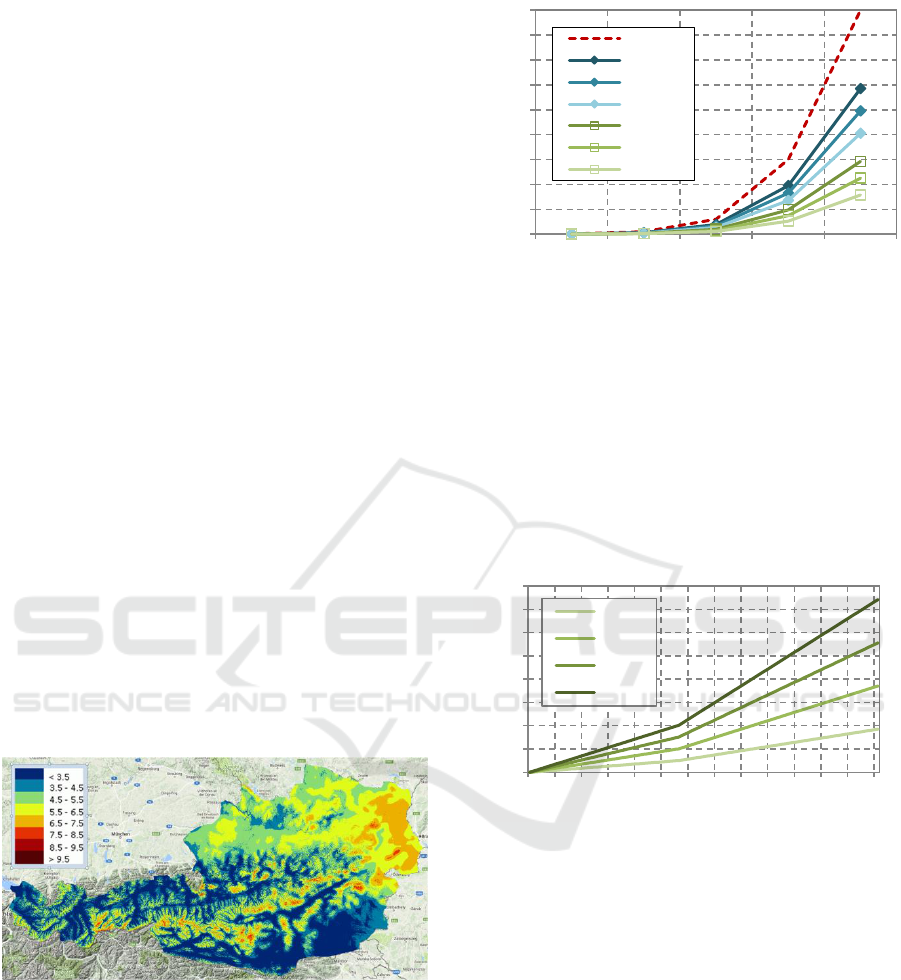
between sender and receiver is given. Figure 8 shows
the minimum distances between neighboring systems
for specific data transmission interval periods (from
one transmission per second down to every 900
seconds) in reference to wind speeds. According to
(“Windatlas Austria,” n.d.) average wind speeds at
100 meters above ground level are (depending on the
geographic area) between 4 and 7 m/s (see Figure 7).
Figure 7: Austrians geographical average annual wind
speed distribution (in m/s) (“Windatlas Austria,” n.d.).
Since clouds are situated above those heights, for
their movement higher wind speeds between 9 and 13
m/s must be considered (Lappalainen and
Valkealahti, 2016). From Figure 8 it can be followed
that data metering and the corresponding
transmission interval should be at least every 60
seconds, since slower intervals increase the distance
between systems significantly. This would enable the
Figure 8: Minimum distance of neighbouring systems
depending on data intervals and different wind speeds (4 to
20 m/s).
usage of signals from neighbouring systems of 1 km
distance. Even shorter transmission intervals would
be beneficial for increasing the forecasting quality
and for engaging shorter forecasting horizons (< 15
minutes). The higher the wind speed the more
distance is required between sender and receiver.
Figure 9 shows the minimum distances in reference
to wind speed and different forecast horizons.
Figure 9: Minimum distance of neighbouring system for
different forecast horizons and wind speeds.
The main motivation of spending efforts on
forecasting data (in this case generation data) is an
advantage and benefit regarding the real-time
operation. In case of forecasting PV generation
several forecasting horizons could be of specific
interest, depending on the application or product.
Considering prosumer households in future, which
include besides PV systems also electric vehicles and
stationary battery electric storage systems, the
forecasting horizon will be mainly targeting an intra-
hour time period. In specific a 15-minute forecasting
horizon could become increasingly important for
future prosumers. This assumption is based on current
time intervals of Smart Meters and grid connection
contracts, which both focus on a 15 minutes interval.
0
2
4
6
8
10
12
14
16
18
1 10 60 300 900
Distance betw. Systems [km]
Data Interval [s]
20 [m/s]
13 [m/s]
11 [m/s]
9 [m/s]
7 [m/s]
5 [m/s]
4 [m/s]
0
10
20
30
40
50
60
70
80
0 1 2 3 4 5 6 8 10 12 14 16 18 20
Minimum distance [km]
Wind speed [m/s]
15 min
30 min
45 min
60 min
Concept for Intra-Hour PV Generation Forecast based on Distributed PV Inverter Data
289
Considering strict power limits in future at
households for consumption but also generation in
future (“E-Control Position Paper Tarife 2.0,” n.d.), a
clear objective for forecasting and optimization
would be given.
3.2 Method
To analyse the available spatio-temporal
measurements of PV inverters, it is important to build
a generic model, which can learn from large amounts
of data and find relations without explicitly given
dependencies between measurement stations.
Therefore, machine learning algorithms like neural
networks are a good choice for forecasting from such
data. Recurrent neural networks were chosen because
they directly use the time ordered structure of the
data. Inputs are thereby ordered in two dimensions:
Different measurement stations make up the first
dimension, optionally extended by external data like
wind or daytime. Time is handled separately by
feeding multiple time steps at once as a second
dimension.
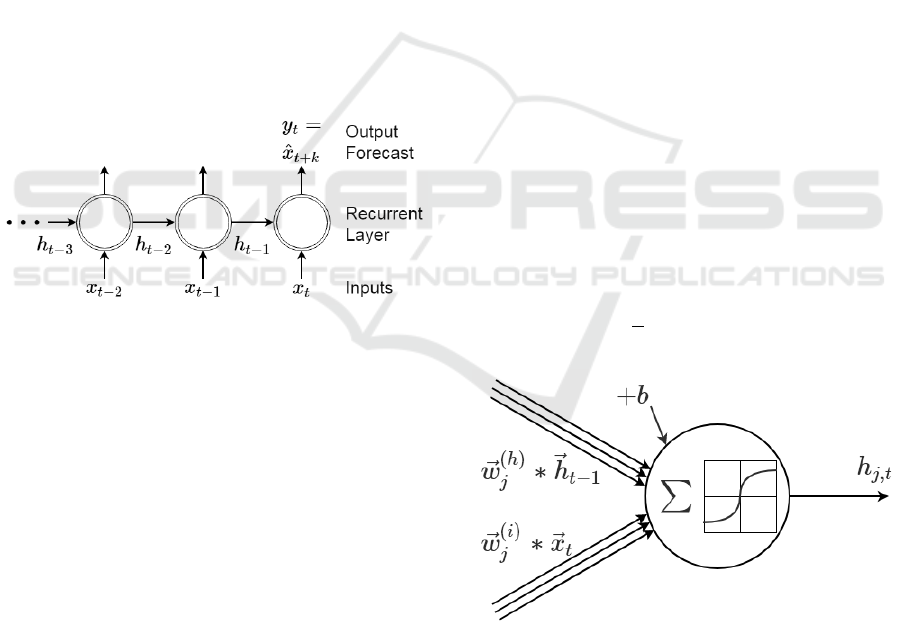
Figure 10: Unrolled representation of an RNN with one
recurrent layer. The x are vectors of inputs, the h the hidden
layer value vectors and y is the output, in our case a forecast
k time steps into the future.
The structure of a recurrent neural network is
sketched in Figure 10. For each time step the inputs
go to the recurrent layer, together with the outputs of
the recurrent layer in the previous time step. This is
done up to the last measurement, where the output
gives the forecast. The computation in the recurrent
layer is identical in each time-step, it consists of
several nodes, which can be visualized as in Figure
11. The components of the hidden layer vector
are
calculated by equation 1:
(1)
The
and
are adjustable weights and biases,
is the input vector and
is the output of the
recurrent layer of the last time step.
is an
activation function, which has to be monotonically
rising. Typically, it is either a sigmoid function, or
even more simple, the ReLU function (Rectified
Linear Unit), defined by equation 2:
(2)
The weights of the inputs and of the hidden layer
outputs are shared between time steps. The output is
then calculated by a fully connected layer, mapping
the hidden layer values on the relevant output features
(equation 3):
(3)
With a large set of historical data, all weights and
biases are adjusted, to give the best fit on the known
outputs. This is done with an optimization algorithm
called backpropagation (Rumelhart et al., 1985).
The recurrent neural network can be extended in
different ways, for example by using multiple
recurrent layers, stacked one after the other. Another,
very popular extension is long short-term memory
(LSTM) networks. There, the node as shown in
Figure 11 is replaced by multiple computation steps.
Multiplication of the end values allows to only use
nodes when they are appropriate (Hochreiter and
Schmidhuber, 1997)(Sak et al., 2014).
The neural network has to be adjusted, to give the
best possible results. In our case, optimization is done
on the Mean Squared Error of the predicted value
(equation 4):
(4)
Figure 11: Visualization of the computation in a hidden
layer node. w denote weights, b bias, x inputs and h the
hidden layer values. j is the index of the node in the layer,
while t is the time index.
The performance of the RNN will be compared to
a naïve approach. For the naïve approach, forecasts
are produced that are equal to the last observed value.
SMARTGREENS 2018 - 7th International Conference on Smart Cities and Green ICT Systems
290
3.3 Use Case Definition
A first use case was defined to show the general
applicability of the proposed method. The simulated
scenario consists of a time series of partly cloudy
days. 10 measurement points are distributed in 5 km
distances on a line, with a non-changing cloud speed
of 9.3 m/s along this line. An equivalent scenario is
visualized in Figure 5. 10000 measurements of
minute averages are simulated. Results of forecasts of
one station for horizons from 1 to 15 minutes are
compared against a naïve forecast, and against results
of a neural network only using the local
measurements.
This scenario already includes the diurnal cycle of
PV production, as well as spatio-temporal
relationships and some mostly random differences
between the measurement stations. It can be seen as
the perfect scenario for the algorithm to be trained:
Partly cloudy conditions on a day with a steady wind
speed. Of course, there are a lot more influences in a
real scenario: Change in wind speed and direction,
two-dimensional and unregularly distributed PV
systems, differences in PV declination and
perturbations of the PV systems. Also cloud
formation and dissipation are not included, but should
not make a large difference on small time scales,
while on clear and overcast days the improvement of
the extended method will be minimal. Despite all of
this further challenges, the result on the single-
dimensional scenario shows already if recurrent
neural networks can be a promising approach for
forecasting from multiple PV measurement stations.
In a next step, the scenario is extended to two-
dimensions, where wind speed and direction changes
can be included. This simulation is done in Processing
(“Processing.org,” n.d.), using a Perlin Noise
implementation to simulate moving random cloud
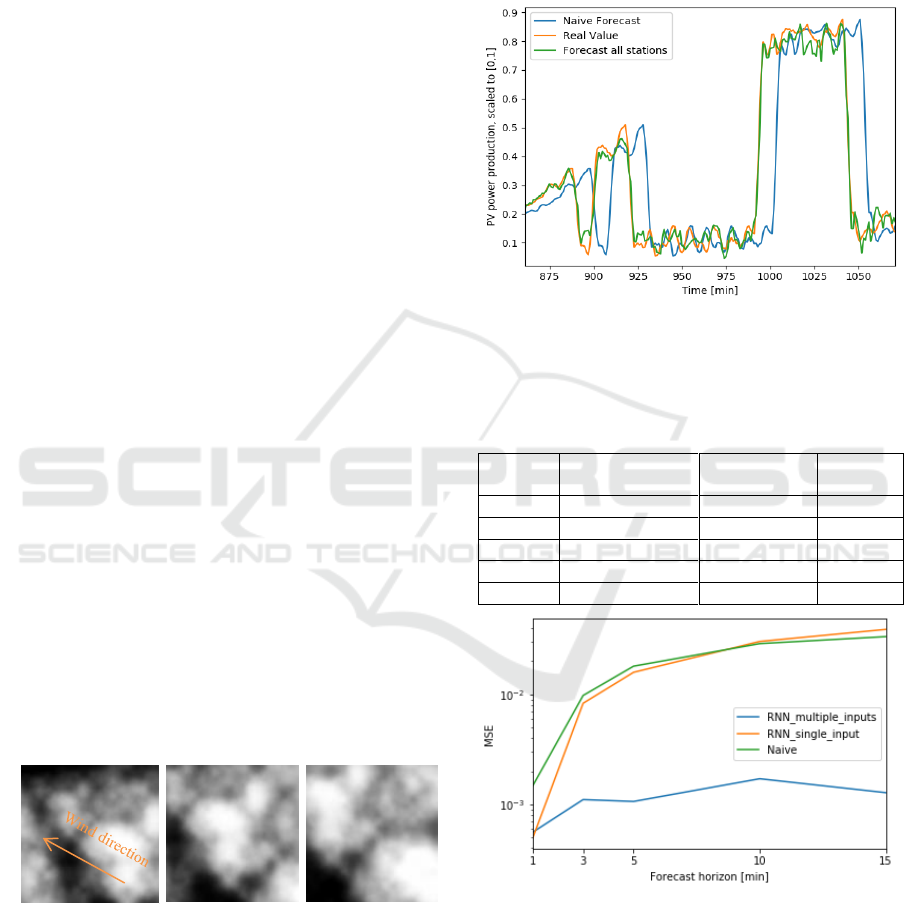
fields (Perlin, 1985) (see Figure 12).
Figure 12: Simulation of a moving cloud field with Perlin
Noise and Processing.
3.4 Preliminary Results
Figure 13 shows 10 minute forecasts for half a day of
partly cloudy weather. There it can be seen that the
RNN with multiple input stations successfully
forecasts abrupt PV generation changes. This is
facilitated by the measurements of stations, who are
reached earlier by the affecting cloud. In contrast the
naïve forecast (and similar other local forecast
methods) has a delay in the size of the forecasting
horizon.
Figure 13: Exemplary forecast for half a day, with a forecast
horizon of 10 mins. The RNN Forecast with all stations
manages to predict sudden changes quite precise.
Table 1: Mean squared error for three different models and
forecast horizons between 1 and 15 minutes.
RNN
Multiple inp
RNN
Single inp
Naïve
1 min
0.0558
0.0493
0.1473
3 min
0.1106
0.8299
0.9773
5 min
0.1064
1.5868
1.8033
10 min
0.1712
3.0243
2.8901
15 min
0.1277
3.8968
3.3475
Figure 14: Mean squared error of different forecast models,
plotted over the forecast horizon. MSE calculated excluding
night periods.
The Mean Squared Error (MSE) for multiple
forecasting horizons are shown in Table 1 and Figure
14. The RNN results are compared with the naïve
method, which takes the last measured value as
forecast, and an RNN with only the local PV inverter
Concept for Intra-Hour PV Generation Forecast based on Distributed PV Inverter Data
291

measurements and the hour of day as an input. The
simple RNN beats the naïve method only for really
short forecast horizons, as the temporal relationship
in our simulated data set is mostly random on longer
time scales. This is supposed to change for real data,
as there the network can learn time trends for different
weather regimes.
In comparison to those two methods, the RNN
with all 10 stations as input manages a big
improvement, especially for longer time horizons.
For horizons above 5 minutes the MSE is reduced to
less than 1/10. This is a significant improvement,
indicating that there also may be an improvement for
more difficult scenarios.
The final model uses the last 50 time steps and one
hidden layer with 40 neurons for prediction.
Furthermore, the hour of the day is included as an
input variable. LSTM models were tested in this
scenario and gave similar results as the RNN. For
more difficult scenarios it would be important to
include more training data, then also the differences
between LSTM and RNN could get more obvious.
4 DISCUSSION & OUTLOOK
A concept for an intra-hour forecast method using
distributed data from PV inverters and machine
learning techniques was introduced in this paper. The
concept assumes the option for PV systems to
broadcast their real-time power generation values and
the ability to receive such values from neighbouring
PV systems. As forecasting method, recurrent
neuronal networks were used. A simplified use-case
for a first proof of concept was created, by using
generic cloud movement at a constant wind speed and
direction.
The requirement analysis stresses the need for
data submissions from PV systems for at least every
minute for intra hour forecasts. The specific
minimum distances between neighboring systems are
depending on wind speed, data transmission rate and
a specific forecast horizon. For a 15 minutes forecast
horizon, distances would range from 5 up to 12 km
between systems, depending on the wind speed and
the corresponding movement of clouds.
A simplified use-case for a first proof of concept
was created, by using generic cloud movement at a
constant wind speed and direction. As forecasting
method, recurrent neuronal networks were used, as
they are designed to handle time series data. The
network can adapt to the time delayed relationship
between different PV stations and increases
forecasting accuracy by a factor of 10 in our
simplified scenario for forecasting horizons between
5 and 15 minutes (in comparison to the Naïve
forecast). Building on these promising results tests on
more realistic scenarios will follow in future. Also,
the kind and design of the neural network used for this
application shall be reviewed in more depth.
The next step in development will focus on
adapting the methods on a two-dimensional model of
25 PV systems arranged in a 5x5 grid. The movement
of clouds will again be simulated by using Processing
and Perlin Noise including changes of wind direction
and speed. Presumed that the neuronal networks
training on the data of this advanced use-case show
good results, a training set consisting of real measured
inverter data will be prepared for further
developments of the method.
ACKNOWLEDGEMENTS
This project has received funding in the framework of
the joint programming initiative ERA-Net Smart
Grids Plus, with support from the European Union’s
Horizon 2020 research and innovation programme.
REFERENCES
Antonanzas, J., Osorio, N., Escobar, R., Urraca, R.,
Martinez-de-Pison, F.J., Antonanzas-Torres, F., 2016.
Review of photovoltaic power forecasting. Sol. Energy
136, 78–111.
https://doi.org/10.1016/j.solener.2016.06.069.
Bessa, R.J., Trindade, A., Miranda, V., 2015. Spatial-
Temporal Solar Power Forecasting for Smart Grids.
IEEE Trans. Ind. Inform. 11, 232–241.
https://doi.org/10.1109/TII.2014.2365703.
E-Control Position Paper Tarife 2.0 [WWW Document],
n.d. E-Control Position Pap. Tarife 20. URL
https://www.e-
control.at/marktteilnehmer/strom/netzentgelte/tarife-2-
0 (accessed 11.29.17).
Graves, A., Mohamed, A. r, Hinton, G., 2013. Speech
recognition with deep recurrent neural networks, in:
2013 IEEE International Conference on Acoustics,
Speech and Signal Processing. Presented at the 2013
IEEE International Conference on Acoustics, Speech
and Signal Processing, pp. 6645–6649.
https://doi.org/10.1109/ICASSP.2013.6638947.
Hochreiter, S., Schmidhuber, J., 1997. Long Short-Term
Memory. Neural Comput. 9, 1735–1780.
https://doi.org/10.1162/neco.1997.9.8.1735.
SMARTGREENS 2018 - 7th International Conference on Smart Cities and Green ICT Systems
292
Lappalainen, K., Valkealahti, S., 2016. Apparent velocity
of shadow edges caused by moving clouds. Sol. Energy
138, 47–52.
https://doi.org/10.1016/j.solener.2016.09.008.
Lonij, V.P.A., Brooks, A.E., Cronin, A.D., Leuthold, M.,
Koch, K., 2013. Intra-hour forecasts of solar power
production using measurements from a network of
irradiance sensors. Sol. Energy 97, 58–66.
https://doi.org/10.1016/j.solener.2013.08.002.
Meteorological Network — ZAMG [WWW Document],
2017. URL
https://www.zamg.ac.at/cms/en/climate/meteorologica
l-network (accessed 11.20.17).
Perlin, K., 1985. An Image Synthesizer, in: Proceedings of
the 12th Annual Conference on Computer Graphics and
Interactive Techniques, SIGGRAPH ’85. ACM, New
York, NY, USA, pp. 287–296.
https://doi.org/10.1145/325334.325247.
Photovoltaik Karten [WWW Document], 2017. URL
https://www.klimafonds.gv.at/foerderungen/foerderlan
dkarte/photovoltaik-karten/ (accessed 11.20.17).
Processing.org [WWW Document], n.d. URL
https://processing.org/download/ (accessed 11.29.17).
Rumelhart, D.E., Hinton, G.E., Williams, R.J., 1985.
Learning Internal Representations by Error Propagation
(No. ICS-8506). California Univ. San Diego La Jolla
Inst. for Cognitive Science.
Sak, H., Senior, A., Beaufays, F., 2014. Long Short-Term
Memory Based Recurrent Neural Network
Architectures for Large Vocabulary Speech
Recognition. ArXiv14021128 Cs Stat.
TensorFlow [WWW Document], n.d. TensorFlow. URL
https://www.tensorflow.org/ (accessed 11.20.17).
Williamson, R.C., 2016. Machine-learning-based
forecasting of distributed solar energy production.
Windatlas Austria [WWW Document], n.d. Wind. Potential
Austria. URL
http://ispacevm11.researchstudio.at/index_v.html
(accessed 11.20.17).
APPENDIX
0
0,2
0,4
0,6
0,8
1
06:00 08:00 10:00 12:00 14:00 16:00 18:00
PV1
0
0,2
0,4
0,6
0,8
1
06:00 08:00 10:00 12:00 14:00 16:00 18:00
PV2
0
0,2
0,4
0,6
0,8
1
06:00 08:00 10:00 12:00 14:00 16:00 18:00
PV3
Concept for Intra-Hour PV Generation Forecast based on Distributed PV Inverter Data
293
