
Semantic Segmentation in Red Relief Image Map by UX-Net
Tomoya Komiyama
1
, Kazuhiro Hotta
1
, Kazuo Oda
2
, Satomi Kakuta
2
and Mikako Sano
2
1
Meijo University, Shiogamaguchi, 468-0073, Nagoya, Japan
2
Asia Air Survey co.,ltd, Kawasaki, 215-0004, Kanagawa, Japan
Keywords: Semantic Segmentation, Red Relief Image Map, U-Net, UX-Net.
Abstract: This paper proposes a semantic segmentation method in Red Relief Image Map which a kind of aerial laser
image. We modify the U-Net by adding the paths between convolutional layer and deconvolutional layer
with different resolution. By using the feature maps obtained at different layers, the segmentation accuracy
is improved. We compare the segmentation accuracy of the proposed UX-Net with the original U-net. Our
proposed method improved class-average accuracy in comparison with the U-Net.
1 INTRODUCTION
Red Relief Image Map is a new topographical
expression technique (Chiba Tatsuro et al., 2010).
Figure 1 shows the example of Red Relief Image
Map. Red Relief Image Map is created by Digital
Elevation Model (DEM) data obtained from aerial
laser survey and ground truth image is created by
visual inspection with reference to DEM data. Red
Relief Image Map expresses amount of inclination
with red chroma and ridges, valleys, and the like
with red brightness, and it is outstanding for reading
performance. For example, it can understand roads
and livers in the mountains and defective areas that
we could not estimate the ground by trees. When
there are topographic changes, the computer must
understand the changes immediately from Red
Relief Image Map. Therefore, in this paper, we carry
out semantic segmentation of four classes (road,
liver, defective areas by trees and others) in Red
Relief Image Map.
Deep Learning gave high accuracy on various
kinds of image recognition tasks such as object
categorization (Huang et al., 2016), object detection
(Ren et al., 2014) and object segmentation (Long et
al., 2015). For object segmentation, the Encoder-
Decoder Convolutional Neural Network (CNN)
(Kendall et al., 2016) such as U-Net (Ronneberger et
al., 2015) worked well. We modify the U-Net for
improving the accuracy of semantic segmentation
from Red Relief Image Map.
U-net used the path between encoder and
decoder with the same resolution in order to
compensate for the information eliminated by
Figure 1: Example of Red Relief Image Map (left) and its
ground truth image with 4 class labels (right). Black pixels
are “defective areas by trees”, blue pixels are “road”, pink
pixels are “river” and white pixels are “others”.
encoder. However, the information at different layer
could be effective for semantic segmentation
because each layer extracts different kinds of
information. For example, shallower layer has fine
information such as small object and correct position
of objects. Deeper layer has the information related
to classification. Thus, we add the path between
encoder and decoder with different resolution to the
U-net. By using the feature maps with different
resolution, the segmentation accuracy is improved.
We evaluated our method on semantic
segmentation problem using eleven Red Relief
Image Maps. We segment four categories; trees,
Komiyama, T., Hotta, K., Oda, K., Kakuta, S. and Sano, M.
Semantic Segmentation in Red Relief Image Map by UX-Net.
DOI: 10.5220/0006716805970602
In Proceedings of the 7th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2018), pages 597-602
ISBN: 978-989-758-276-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
597
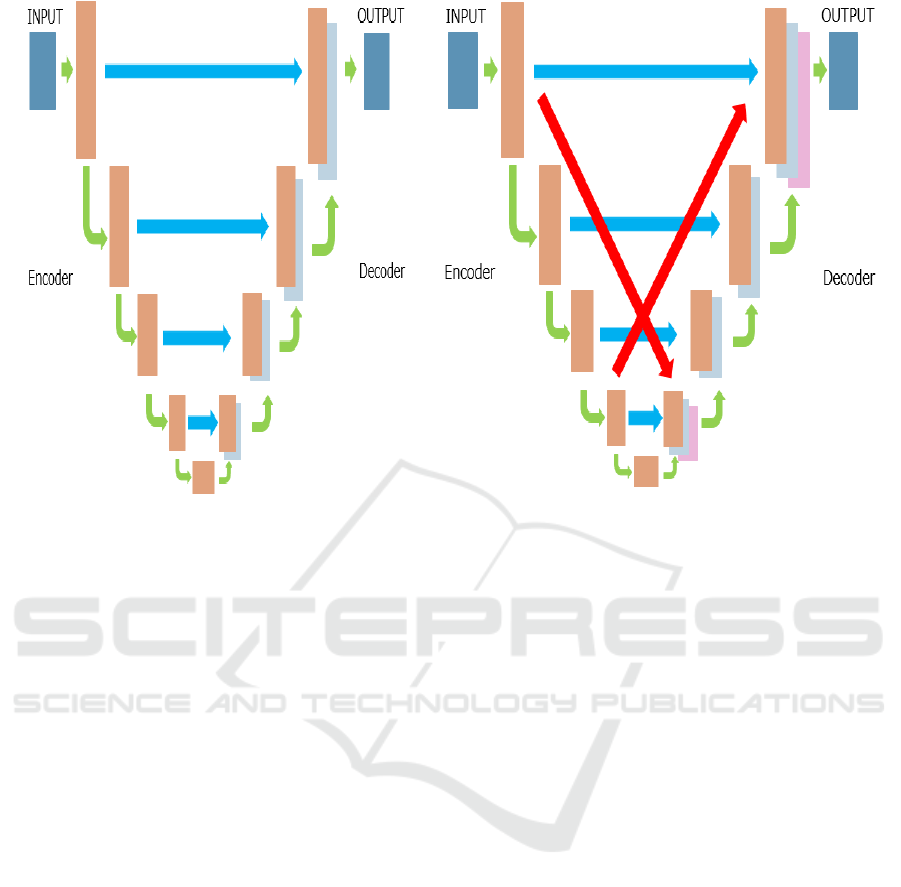
Figure 2: Structure of two networks. (a) Structure of U-Net (left). (b) Structure of UX-Net (right).
road, river and others in experiments. Our proposed
method improved the accuracy in comparison with
the U-Net.
This paper is organized as follows. Section 2
describes the details of the proposed method.
Section 3 shows the experimental results.
Comparison with the original U-net is also shown.
Finally, we describe conclusion and future works in
Section 4.
2 PROPOSED METHOD
In general, the number of training data for the U-net
depends on the number of pixels in training images.
Thus, we do not need to use a large number of
training images. In this paper, we have only 11 Red
Relief Image Map with ground truth. Therefore, we
use the U-net as the baseline and modify it.
We explain the original U-Net in section 2.1. The
proposed method is explained in section 2.2.
2.1 U-Net
U-Net is a kind of encoder-decoder CNN and is
effective for semantic segmentation. In recent years,
it is also used for image generation task such as
pix2pix (Isola et al., 2017) which improved Deep
Convolutional Generative Adversarial Networks
(Radford, et al., 2016). Encoder-Decoder CNN
carries out convolution at encoder part and
deconvolution at decoder part in order to make the
segmentation result.
U-Net improved the segmentation accuracy by
using the feature map at the encoder parts in decoder
parts with the same resolution as shown in Figure 2
(a). The paths from encoder part to decoder part
compensate for the small objects and edges
eliminated at encoder parts.
2.2 UX-Net
A structure of the proposed network is shown in
Figure 2 (b). In addition to the original path of the
U-net, we give the path from the shallow layer at
encoder part to the beginning of decoder part in
order to use the fine information at the shallow layer
in the decoder part with small resolution. Since the
beginning of decoder part does not have fine
information such as small objects, edges and correct
position of object, the feature at shallow layer should
be useful. Furthermore, we also add the path from
deep layer at encoder part to the final layer at
decoder part. Since the feature map at the deep layer
of encoder part has the information about object
categories, the information should be useful to make
a final segmentation result. New adding paths are
like “X” shape. Thus, we call the proposed network
“UX-Net”.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
598
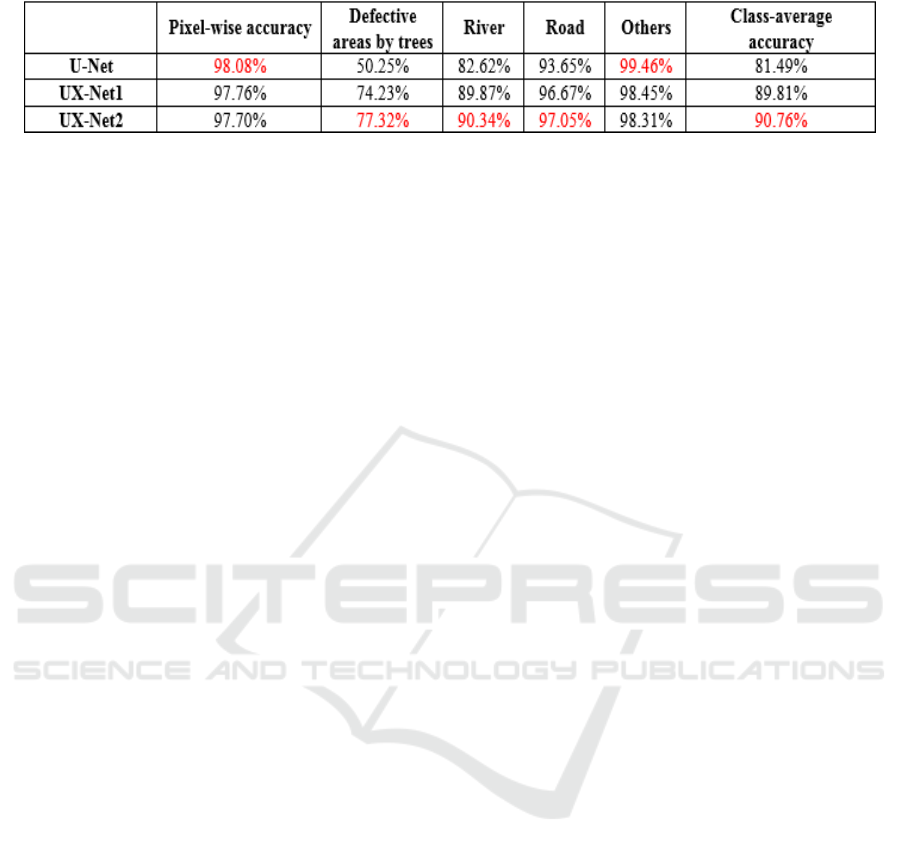
Table 1: Accuracy of the proposed method and U-Net.
However, the size of feature maps of shallow
layer at encoder part and that of beginning layer at
decoder part is different. Thus, we use pooling to be
the same size. Similarly, since the size of deep layer
at encoder part and that of final layer at decoder part
is different, we use unpooling to be the same size.
We use batch normalization (Ioffe and Szegedy,
2015) at each layer though original U-net did not use
it. Class balancing (Badrinarayanan et al., 2016) is
also used to improve the segmentation accuracy of
objects with small area.
3 EXPERIMENTS
We show experimental results on semantic
segmentation in Red Relief Image Map. At first, we
explain the dataset that we use in the following
experiments in section 3.1. Comparison methods are
explained in section 3.2. Experimental results are
shown in section 3.3.
3.1 Dataset
In this paper, we use eleven Red Relief Image Maps.
Five images are used for training images and
remaining six images are used for test. Since some
quantity of training images are necessary for training
deep learning, we crop a local region of 256 x 256
pixels with overlapped ratio 0.7 from Red Relief
Image Map of 1,500 x 2,000 pixels. In addition, we
rotate those cropped regions at the interval of 90
degrees to enlarge the number of training images. As
a result, the number of training images is 7,344. Test
regions of 256 x 256 pixels are cropped without
overlap from the original six images. The total
number of test regions is 185.
3.2 Comparison Methods
We compare our method with some networks
including the original U-net. The first method is the
U-Net. The second method is our proposed method.
When we concatenate the feature maps of different
resolution, the size of each feature map is changed
by pooling and convolution or unpooling and
deconvolution. We call this method “UX-Net1”.
The third method is also our method but we do
not use convolution and deconvolution when we
change the size of feature map. Only pooling and
unpooling are used to change the size of feature
maps. We call this network “UX-Net2”.
3.3 Experimental Results
We show the experimental results of all methods. As
evaluation measure, we use the pixel-wise accuracy
and class average accuracy. Pixel-wise accuracy is
the accuracy in all pixels. This is influenced by
objects of large area such as background. Class-
average accuracy is the average accuracy of each
class. This is influenced by objects of small area
such as defective areas by trees, road and river. In this
paper, class average accuracy is more important than
pixel-wise accuracy because we want to segment
defective areas by trees, road and river well.
We show the segmentation results of all methods
in Figure 3 and 4. The first row shows input image
and ground truth label. The second rows show the
result by U-Net and UX-Net1. The bottom row
shows the result by UX-Net2.
We show the pixel-wise accuracy and the class-
average accuracy of each method in Table 1. The
best result at each class is shown in red.
We found that our proposed UX-Net has higher
accuracy for defective areas by trees, road and river
than the original U-Net. The pixel-wise accuracy of
the proposed method is worse than the U-net
because the pixel-wise accuracy is influenced by the
background which is not the main target.
Note that our proposed method can improve the
accuracy of defective areas by trees that are hard to
segment by the U-net. This is because we use the
“X-path” that the fine information obtained at
shallow layer is used in deep layer and semantic
information obtained at deep layer is used to general
the final segmentation result. When we compare
UX-Net1 with UX-Net2, UX-Net2 gave better result
than UX-Net1. The main difference is how to
change the feature map. Experimental results show
that only pooling and unpooling is effective to
change the size. When we use pooling and
Semantic Segmentation in Red Relief Image Map by UX-Net
599
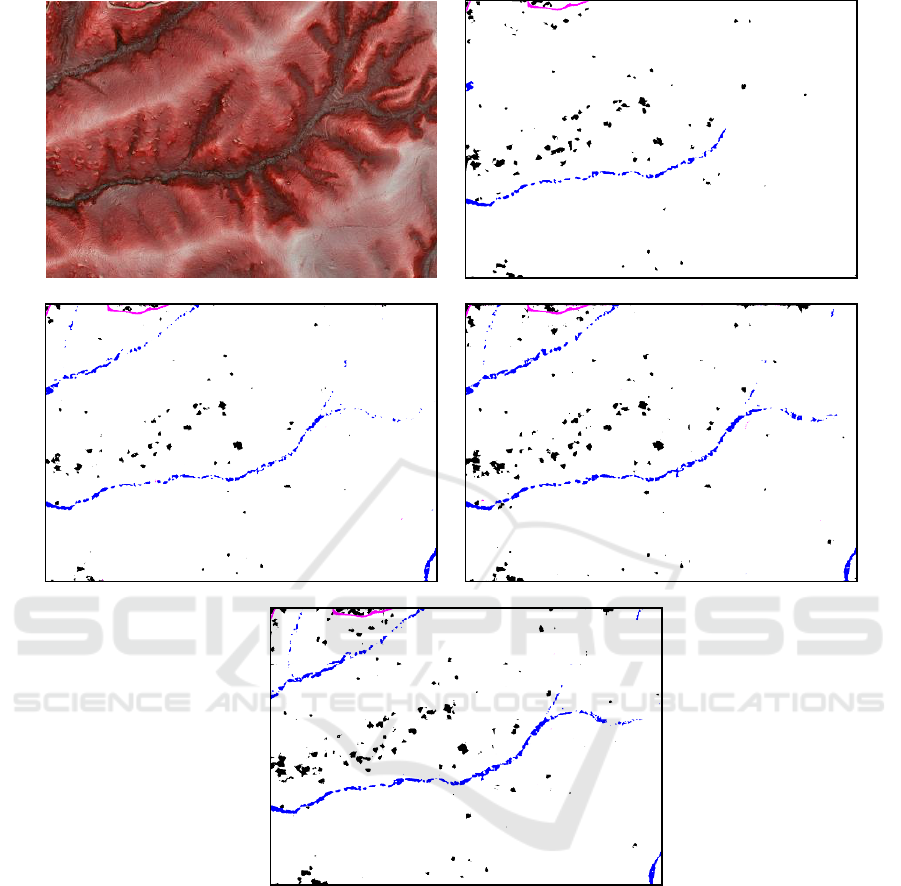
Figure 3: Segmentation results from Red Relief Image Maps. The first row shows input image and ground truth label. The
second rows show the result by U-Net and UX-Net1. The bottom row shows the result by UX-Net2.
Figure 3: Segmentation results from Red Relief Image Maps. The first row shows input image and ground truth label. The
second rows show the result by U-Net and UX-Net1. The bottom row shows the result by UX-Net2.
convolution, the feature map obtained by shallow
layer is changed by convolution, and fine
information is lost. Similarly, the semantic
information may be lost by unpooling and
deconvolution. These are the reason why UX-Net2
is better.
4 CONCLUSION
In this paper, we carried out semantic segmentation
from Red Relief Image Map which is a kind of aerial
laser image. We add “X-path” to the original U-net.
X-path means that fine information is used in deep
layer and semantic information is used to generate
final segmentation result. Experimental results
demonstrated the effectiveness of our proposed UX-
Net. In particular, the accuracy of defective areas by
trees, road and river is much improved in
comparison with the original U-Net.
However, our proposed method has over-
detection of defective areas by trees. Therefore, we
want to improve the accuracy by using not only
information at shallow encoder part and deep
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
600
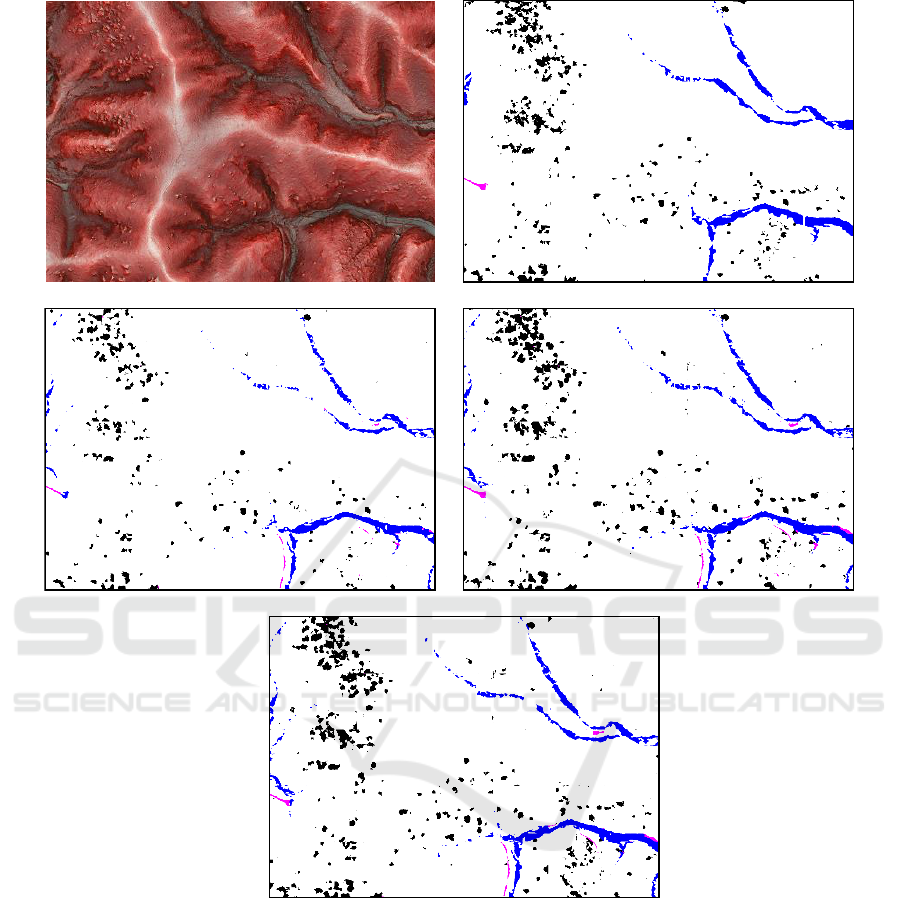
Figure 4: Segmentation results from Red Relief Image Maps. The first row shows input image and ground truth label. The
second rows show the result by U-Net and UX-Net1. The bottom row shows the result by UX-Net2.
encoder part but also effectively information at
various feature maps. Moreover, we adopt a loss
function for considering objects which are hard to
detect, and we would like to improve the class
average accuracy further. These are subjects for
future works.
REFERENCES
Chiba, T., Suzuki, Y., Arai, K., Tomita, Y., Koizumi, S.,
Nakashima, K., Ogawa K., 2010. The measurement of
magma discharge volume of the "Jogan" eruption in
Aokigahara on Fuji volcano, based on the micro
topography by LiDAR and result of the drilling.
Journal of the Japan Society of Erosion Control
Engineering.
Huang, S., Xu, Z., Tao, D., Zhang, Y., 2016. Part-Stacked
CNN for Fine-Grained Visual Categorization.
Computer Vision and Pattern Recognition.
Long, J., Shelhamer, E., Darrell, T., 2015. Fully
Convolutional Networks for Semantic Segmentation.
Computer Vision and Pattern Recognition.
Ren, S., He, K., Girshick, R., Sun, J., 2014. Faster R-
CNN: Towards Real-Time Object Detection with
Semantic Segmentation in Red Relief Image Map by UX-Net
601

Region Proposal Networks. Computer Vision and
Pattern Recognition.
Badrinarayanan, V., Kendall A., Cipolla R., 2016. SegNet:
A Deep Convolutional Encoder-Decoder Architecture
for Image Segmentation. IEEE Transactions on
Pattern Analysis and Machine Intelligence.
Ronneberger, O., Fischer, P., Brox, T., 2015. U-Net:
Convolutional Networks for Biomedical Image
Segmentation. Medical Image Computing and
Computer Assisted Intervention.
Isola, P., Zhu, J., Zhou, T., Efros A. A., 2017. Image-to-
Image Translation with Conditional Adversarial
Networks. Computer Vision and Pattern Recognition.
Radford, A., Metz, L., Chintala, S., 2016. Unsupervised
Representation Learning With Deep Convolutional
Generative Adversarial Network. International
Conference on Learning Representations.
Ioffe, S., Szegedy, C., 2015. Batch Normalization:
Accelerating Deep Network Training by
ReducingInternal Covariate Shift. arXiv preprint
arXiv:1502.03167.
Badrinarayanan, V., Kendall, A., and Cipolla, R., 2016.
SegNet: A Deep Convolutional Encoder-Decoder
Architecture for Image Segmentation. IEEE
Transactions on Pattern Analysis and Machine
Intelligence.
ICPRAM 2018 - 7th International Conference on Pattern Recognition Applications and Methods
602
